

New Developments in Detector and Bund Wall Standards to Mitigate the Risk of Hazardous Liquid Leaks


Abstract
:
1. Introduction
2. Review of Mitigation Measures Standards
2.1. Review of Leak Detector Standards
2.1.1. Level Transmitter as a Leak Detect System
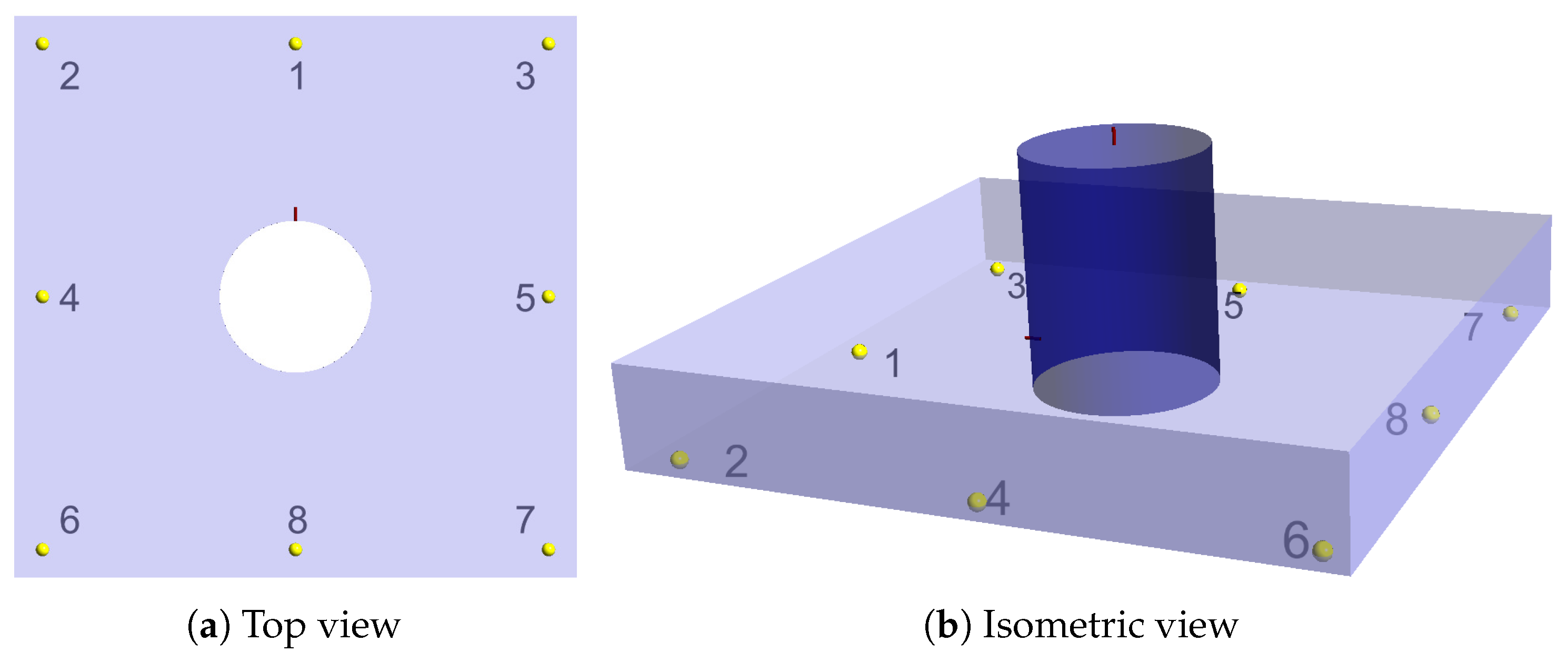
2.1.2. Detector Location
2.2. Review of Bund Design Standards
2.2.1. Bund Capacity

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Regional Standard | Minimum Capacity | Bund Wall Height | Separation Distance |
|---|---|---|---|
| National Fire Protection Association & Environmental Protection Agency, US | 110% of the largest tank [23] | Maximum 1.8 m (6 feet) [23] | 0.9 m (3 feet) from a secondary containment system [25] |
| Health and Safety Guidance, UK | 110% of the largest container [46] | Maximum 1.5 m (5 feet) [24] | Minimum 1 m for up to 100 2 m for above 100 [26] |
| Victoria, Australian Standard [48] | 100% of the largest container 25% of total volume of all containers | N/A | Half height rule—half the height of the tanks |
| Tasmania, Australian Standard [49] | 100% of the largest tank 25% of total volume of all vessels | 0.5∼1.5 m | Minimum 1 m |
| Chemical Substances Control Act, South Korea [27] | 110% of the largest tank | Above 0.5 m [22] | 1.5 m of R when H < 15 m of R when H ≥ 15 m |
| Health and Safety at Work Act, New Zealand [50] | 110% of the largest container 25% of total volume of all containers | N/A | |
| IPC Guidance, Ireland [51] | 110% of the largest container 25% of total volume of all containers | Maximum 1.5 m | Sufficient distance |
2.2.2. Bund Wall Height
2.2.3. Separation Distance
3. Numerical Analysis of Standards on Mitigation Measures
3.1. CFD Modelling
3.2. Geometry and Mesh
4. Numerical Results of Liquid Leakage
4.1. Detection Time Comparison for Various Tank Heights
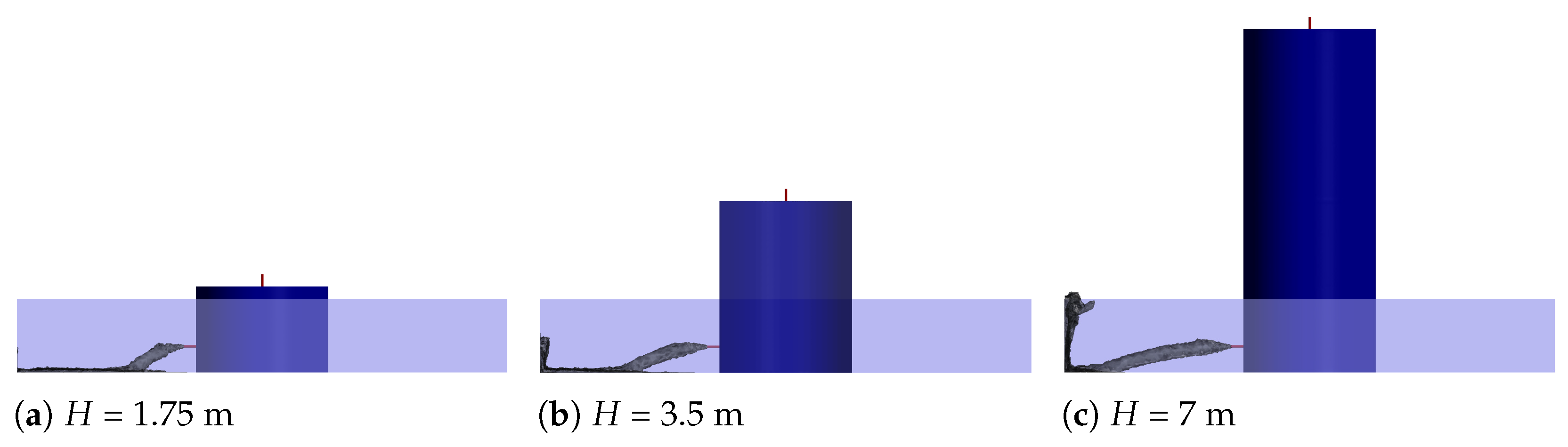
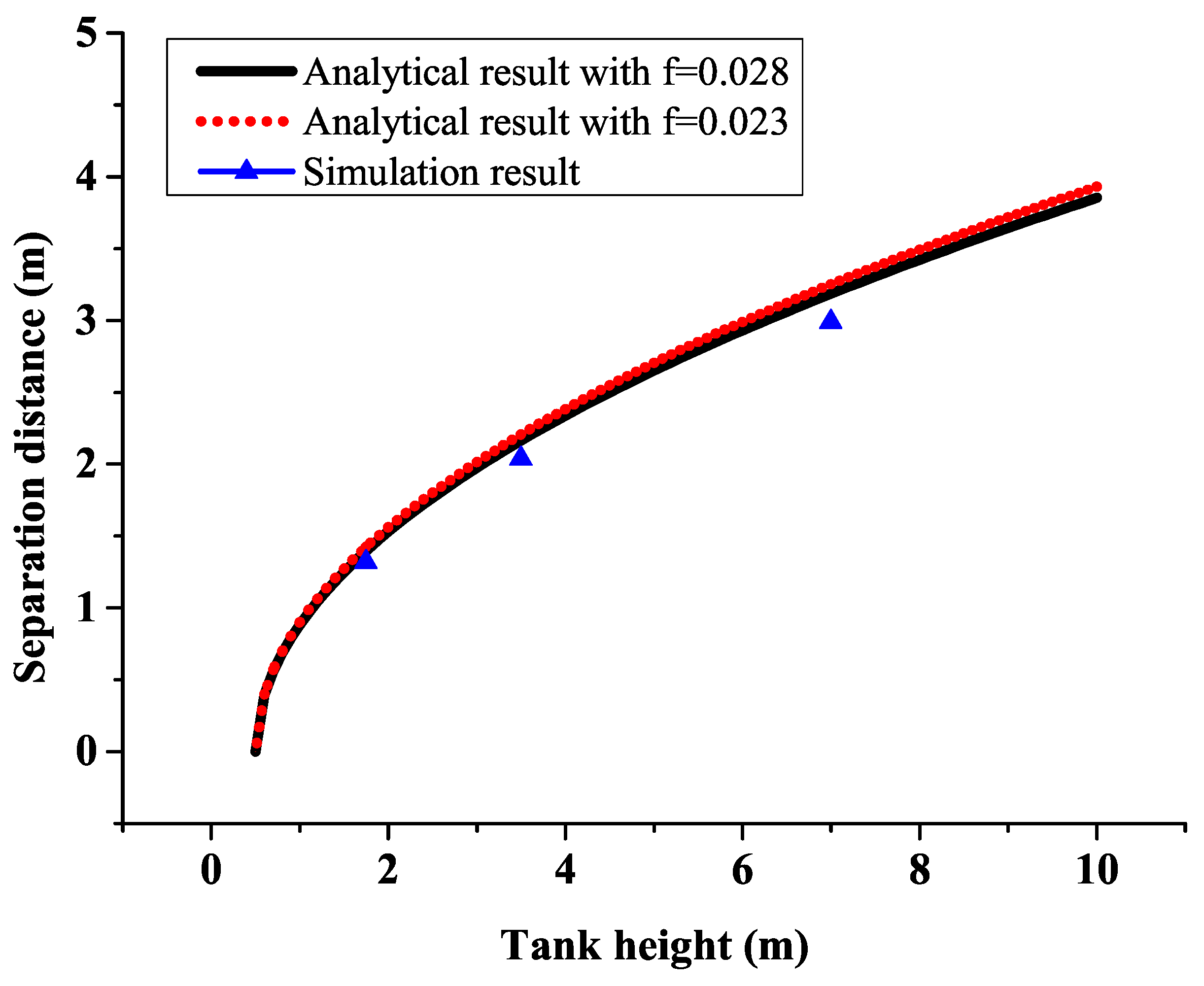
4.2. Results for Separation Distance at Various Tank Heights
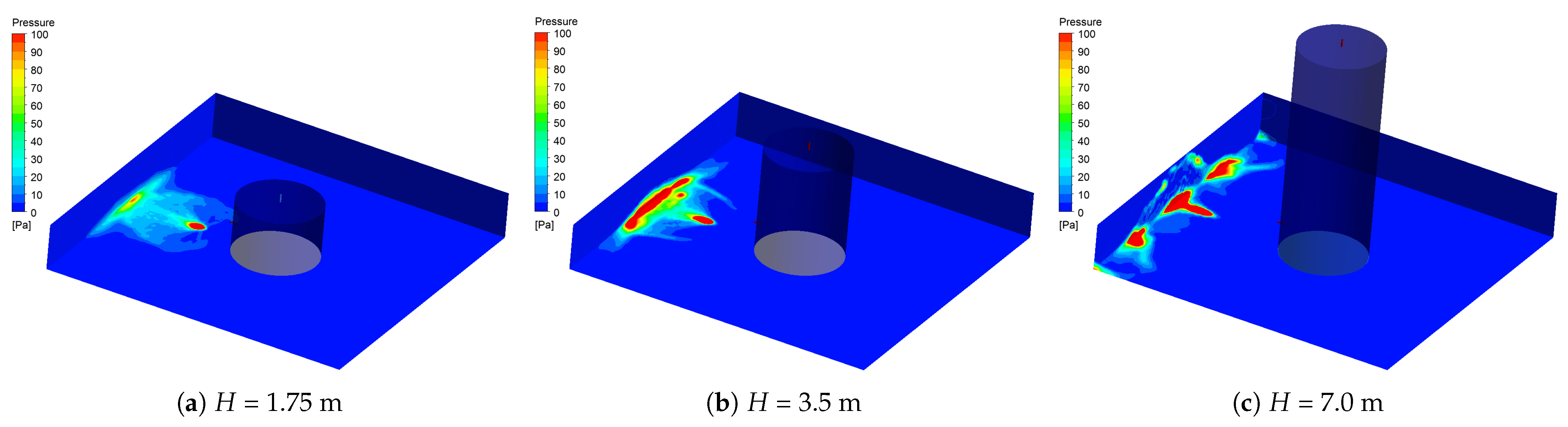
4.3. Results for Dynamic Pressure at Bund Wall
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Belvederesi, C.; Thompson, M.S.; Komers, P.E. Statistical analysis of environmental consequences of hazardous liquid pipeline accidents. Heliyon 2018, 4, e00901. [Google Scholar] [CrossRef] [PubMed]
- Abbasi, T.; Abbasi, S.A. The boiling liquid expanding vapour explosion (BLEVE): Mechanism, consequence assessment, management. J. Hazard. Mater. 2007, 141, 489–519. [Google Scholar] [CrossRef] [PubMed]
- National Institute of Chemical Safety. Chemical accident statistics reports. In Chemical Substance Comprehensive Information System; National Institute of Chemical Safety: Cheongju, Republic of Korea, 2002. [Google Scholar]
- Hou, J.; Gai, W.; Cheng, W.; Deng, Y. Hazardous chemical leakage accidents and emergency evacuation response from 2009 to 2018 in China: A review. Saf. Sci. 2021, 135, 105101. [Google Scholar] [CrossRef]
- Donaldson, T. Case study 1: Tees Storage, Seal Sands, July 1999. In Loss Prevention Bulletin: Articles and Case Studies from around the World; Special Issue; Institution of Chemical Engineers: Rugby, UK, 2012. [Google Scholar]
- The Organization for Economic Cooperation and Development (OECD). OECD Guiding Principles for Chemical Accident Prevention, Preparedness and Response, 3rd ed.; Series on Chemical Accidents; The Organization for Economic Cooperation and Development (OECD): Paris, France, 2023; ISBN 978-92-64-90795-9. [Google Scholar]
- Santoso, B.; Indarto; Deendarlianto. Pipeline leak detection in two phase flow based on fluctuation pressure difference and artificial neural network (ANN). J. Appl. Mech. Mater. 2014, 493, 186–191. [Google Scholar] [CrossRef]
- Husain, M.A.; Zaki, N.M.; Mukhlas, N.A.; Ahmad, S.S.; Soom, E.M. Current practice of early leak detection methods for underground storage tanks. J. Phys. Conf. Ser. 2022, 2259, 012029. [Google Scholar]
- Britto, K.A.; Prasad, D.; Ragavendiran, S.P.; Shreepad, S.; Singh, N.K.; Bhowmick, A.; Ramkumar, M.S. Supervised Learning Algorithm for Water Leakage Detection through the Pipelines. In Proceedings of the 2022 3rd International Conference on Smart Electronics and Communication (ICOSEC), Trichy, India, 20–22 October 2022; pp. 1263–1269. [Google Scholar]
- Olszewska, A. Using the acoustic emission method for testing aboveground vertical storage tank bottoms. Appl. Acoust. 2022, 188, 108564. [Google Scholar] [CrossRef]
- El-Shiekh, T.M. Leak detection methods in transmission pipelines. Energy Sources A Recovery Util. Environ. Eff. 2010, 32, 715–726. [Google Scholar] [CrossRef]
- Williams, D.J.; Wadsworth, W.; Salvaggio, C.; Messinger, D.W. A hybrid thermal video and FTIR spectrometer system for rapidly locating and characterizing gas leak. Remote Sens. Aerosol Chem. Gases Model Simul./Assiumulation Appl. Air Qual. 2006, 6299, 108–111. [Google Scholar]
- Chen, C.; Tsow, F.; Campbell, K.D.; Iglesias, R.; Frozani, E.; Tao, N. A wireless hybrid chemical sensor for detection of envirnomnetal volatile organic compounds. IEEE Sens. J. 2013, 13, 1748–1755. [Google Scholar] [CrossRef]
- Vandrangi, S.K.; Lemma, T.A.; Mujtaba, S.M.; Ofei, T.N. Developments of leak detection, diagnostics, and prediction algorithms in multiphase flows. Chem. Eng. Sci. 2022, 248, 117205. [Google Scholar] [CrossRef]
- Meribout, M.; Khezzar, L.; Azzi, A.; Ghendour, N. Leak detection systems in oil and gas fields: Present trends and future prospects. Flow Meas. Instrum. 2020, 75, 101772. [Google Scholar] [CrossRef]
- Loizou, K.; Koutroulis, E. Water level sensing: State of the art review and performance evaluation of a low-cost measurement system. Measurement 2016, 89, 204–214. [Google Scholar] [CrossRef]
- Kim, H.Y.; Byun, S.H. A Study on the Improvement of Pressure Container Level Measurement Errors. Trans. Korean Inst. Electr. Eng. 2010, 59, 1889–1893. [Google Scholar]
- Secondary Containment Guidance, Michigan Department of Environment, USA. Available online: https://www.michigan.gov/-/media/Project/Websites/egle/Documents/Programs/MMD/Hazardous-Waste/Secondary-Containment-Guidance.pdf (accessed on 3 November 2023).
- Secondary Containment, Health and Safety Executive, UK. Available online: https://www.hse.gov.uk/comah/sragtech/techmeascontain.htm (accessed on 3 November 2023).
- Safety System for Pressurised Heavy Water Reactors, Atomic Energy Regulatory Board, India. Available online: https://aerb.gov.in/images/PDF/CodesGuides/NuclearFacility/NPPDesign/7.PDF (accessed on 3 November 2023).
- Nau, P.R.; Fultz, B.S. Coatings and linings for secondary chemical containment in power plants. J. Prot. Coat. Linings 1990, 7, 42–49. [Google Scholar]
- National Institute of Chemical Safety. Public Notice on the Installation and Management of Outdoor Storage Facilities for Hazardous Chemicals, 2022-13; National Institute of Chemical Safety: Cheongju, Republic of Korea, 2022.
- NFPA 30. Flammable and Combustible Liquids Code, National Fire Protection Association, USA. Available online: https://www.nfpa.org/codes-and-standards/3/0/30?l=729 (accessed on 3 November 2023).
- Barnes, D.S. The Design of Bunds; HSE: Merseyside, UK, 1990.
- Spill, Prevention, Control, and Countermeasure (SPCC), Environmental Protection Agency, USA. Available online: https://www.epa.gov/oil-spills-prevention-and-preparedness-regulations/spill-prevention-control-and-countermeasure-19 (accessed on 3 November 2023).
- Storage of Flammable Liquids in Tanks, HSG176, Health and Safety Executive, UK. Available online: https://www.hse.gov.uk/pubns/books/hsg176.htm (accessed on 3 November 2023).
- Chemical Substances Control Act, Ministry of Environment, Republic of Korea. Available online: https://www.law.go.kr/LSW/eng/engLsSc.do?menuId=2§ion=lawNm&query=Chemical+Substances+Control+Act&x=0&y=0#liBgcolor1 (accessed on 3 November 2023).
- Lees, F. Lees’ Loss Prevention in the Process Industries: Hazard Identification, Assessment and Control, 4th ed.; Butterworth-Heinemann: Oxford, UK, 2012. [Google Scholar]
- Zhao, S.; Huo, J.; Xu, R.; Liu, Y.; Jing, M.; Zhang, B. Prevention of bund overtopping after a catastrophic tank failure accident: Effects of bund design, liquids and scale-up. Process Saf. Environ. Prot. 2022, 166, 41–56. [Google Scholar] [CrossRef]
- Luan, X.; Zhang, M.; Zhao, S.; Zhang, B. Numerical study on the effects of bund on liquid pool spreading and vapor dispersion after a catastrophic LNG tank failure. Process Saf. Environ. Prot. 2023, 176, 74–86. [Google Scholar] [CrossRef]
- Luan, X.; Huo, J.; Zhao, S.; Zhang, B. Risk Control of Overtopping Phenomenon after a Catastrophic Tank Failure Through Optimized Bund Design. Chem. Eng. 2022, 90, 433–438. [Google Scholar]
- Yaqoob, U.; Younis, M.I. Chemical Gas Sensors: Recent Developments, Challenges, and the Potential of Machine Learning—A Review. Sensors 2021, 21, 2877. [Google Scholar] [CrossRef]
- Bellegoni, M.; Ovidi, F.; Tempesti, L.; Mariotti, A.; Tognotti, L.; Landucci, G.; Galletti, C. Optimization of gas detectors placement in complex industrial layouts based on CFD simulations. J. Loss Prev. Process Ind. 2022, 80, 104859. [Google Scholar] [CrossRef]
- Vianna, S.S. The set covering problem applied to optimisation of gas detectors in chemical process plants. Comput. Chem. Eng. 2019, 121, 388–395. [Google Scholar] [CrossRef]
- Mohindru, P. Development of liquid level measurement technology: A review. Flow Meas. Instrum. 2023, 89, 102295. [Google Scholar] [CrossRef]
- Chemical Accident Prevention Provisions (CFR, Title 40, Chapter I, Subchapter C, Part 68), Environmental Protection Agency, USA. Available online: https://www.ecfr.gov/current/title-40/chapter-I/subchapter-C/part-68?toc=1 (accessed on 3 November 2023).
- European Committee for Standardization (CEN). Leak Detection Systems—Part 1: General Principles; CEN-CENELEC Management Centre: Brussels, Belgium, 2016. [Google Scholar]
- Design Guideline—Liquid Chemical Storage Tanks, Goulburn Valley Water: Shepparton, Australia. Available online: https://www.gvwater.vic.gov.au/Portals/0/GV-Water/Documents/Development-Construction-Manual/Design_Guideline_-_Liquid_Chemical_Storage_Tanks.pdf?ver=2019-10-25-161824-573 (accessed on 3 November 2023).
- Legg, S.W.; Benavides-Serrano, A.J.; Siirola, J.D.; Watson, J.P.; Davis, S.G.; Bratteteig, A.; Laird, C.D. A stochastic programming approach for gas detector placement using CFD-based dispersion simulations. Comput. Chem. Eng. 2021, 47, 194–201. [Google Scholar] [CrossRef]
- Underground Storage Tanks (USTs) Laws and Regulations, Environmental Protection Agency, USA. Available online: https://www.epa.gov/ust/underground-storage-tanks-usts-laws-and-regulations (accessed on 3 November 2023).
- Containment and Detection of Releases (CFR, Title 40, Chapter I, Subchapter I, Part 265, Subpart J, 265.193), Environmental Protection Agency, USA. Available online: https://www.ecfr.gov/current/title-40/chapter-I/subchapter-I/part-265/subpart-J/section-265.193 (accessed on 3 November 2023).
- Australian Institute of Petroleum (AIP). Guidelines for Safe above Ground Fuel Storage on Farms and Industrial Sites; Australian Institute of Petroleum (AIP): Canberra, Australia, 2003. [Google Scholar]
- Rules on Occupational Safety and Health Standards, Ministry of Employment and Labor, Republic of Korea. Available online: https://www.law.go.kr/LSW/eng/engLsSc.do?menuId=2§ion=lawNm&query=Occupational+Safety+and+Health&x=0&y=0#liBgcolor1 (accessed on 3 November 2023).
- Clark, S.O.; Deaves, D.M.; Lines, I.G.; Henson, L.C. Effects of secondary containment on source term modelling. In Contract Research Report; WS Atkins Consultants Ltd.: London, UK, 2001; Volume 324. [Google Scholar]
- Malich, G.; Braun, M.; Loullis, P.; Winder, C. Comparison of regulations concerning hazardous substance from an international perspective. J. Hazard. Mater. 1998, 62, 143–159. [Google Scholar] [CrossRef]
- The Storage of Flammable Liquids in Containers, HSG51, Health and Safety Executive, UK. Available online: https://www.hse.gov.uk/pubns/books/hsg51.htm (accessed on 3 November 2023).
- Nair, S.R. Methods of avoiding tank bund overtopping using computational fluid dynamics tool. Insti. Chem. Eng. Symp. Ser. 2008, 154, 479. [Google Scholar]
- Liquid Storage and Handling Guidelines, Environment Protection Authority, Australia. Available online: https://www.epa.vic.gov.au/about-epa/publications/1698 (accessed on 3 November 2023).
- Bunding and Spill Management Guidelines, Environment Protection Authority, Australia. Available online: https://epa.tas.gov.au/Documents/Bunding_and_Spill_Management_Guidelines_Dec_2015.pdf (accessed on 3 November 2023).
- Health and Safety at Work Act 2015, Secondary Containment Systems, New Zealand. Available online: https://www.legislation.govt.nz/act/public/2015/0070/latest/DLM5976660.html (accessed on 3 November 2023).
- IPC Guidance Note on Storage and Transfer of Materials for Scheduled Activities, Environment Protection Authority, Ireland. Available online: https://www.epa.ie/publications/licensing--permitting/industrial/ied/IPC_Guidance_note_Materials_storage.pdf (accessed on 3 November 2023).
- Luan, X.; Huo, J.; Liu, Y.; Jiang, J.; Zhang, B. Predictive model of bund overtopping fraction for catastrophic failure of storage tank. Saf. Sci. 2020, 129, 104801. [Google Scholar] [CrossRef]
- Megdiche, I.; Atherton, W.; Allanson, D.; Harris, C. Effects of mitigation on the catastrophic faillure of storage tanks. J. Loss Prev. Process Ind. 2022, 80, 104852. [Google Scholar] [CrossRef]
- Megdiche, I. Evaluation of the Mechanical Strength of Bund Walls under the Catastrophic Failure of Strage Tanks via Fluid Structure Interaction. Ph.D. Thesis, Liverpool John Moores University, Liverpool, UK, 2019. [Google Scholar]
- Control of Fire-Water Run-Off from CIMAH Sites to Prevent Environmental Damage, EH70, Health and Safety Executive, UK. Available online: https://www.hse.gov.uk/pubns/books/eh70.htm (accessed on 3 November 2023).
- Kundu, P.K.; Cohen, I.M.; Dowling, D.R. Fluid Mechanics, 6th ed.; Academic Press: New York, NY, USA, 2015. [Google Scholar]
- Agboola, O.O.; Akinnuli, B.O.; Kareem, B.; Akintunde, M.A. Optimum detailed design of 13,000 m3 oil storage tanks using 0.8 height-diameter ratio. Mater. Today Proc. 2021, 44, 2837–2842. [Google Scholar] [CrossRef]
- Agboola, O.O.; Akinnuli, B.O.; Kareem, B.; Akintunde, M.A. Decision on the selection of the best height-diameter ratio for the optimal design of 13,000 m3 oil storage tank. Cogent Eng. 2020, 7, 1770913. [Google Scholar] [CrossRef]
- Batchelor, G.K. An Introduction to Fluid Dynamics, 1st ed.; Cambridge University Press: Cambridge, UK, 1967. [Google Scholar]
- ANSYS. Fluent User’s Guide; 2021R2 help system; Ansys, Inc.: Canonsburg, PA, USA, 2021. [Google Scholar]
- Wang, S.; Yang, Y.; Zhang, L.; Mohanty, L.; Jin, R.; Wu, S.; Lu, P. High-precision fiber optic liquid level sensor based on fast Fourier amplitude demodulation in a specific range of spectrum. Measurement 2022, 187, 110326. [Google Scholar] [CrossRef]
- Fox, R.W.; McDonald, A.T.; Mitchell, J.W. Introduction to Fluid Mechanics, 10th ed.; Wiley: New York, NY, USA, 2020. [Google Scholar]


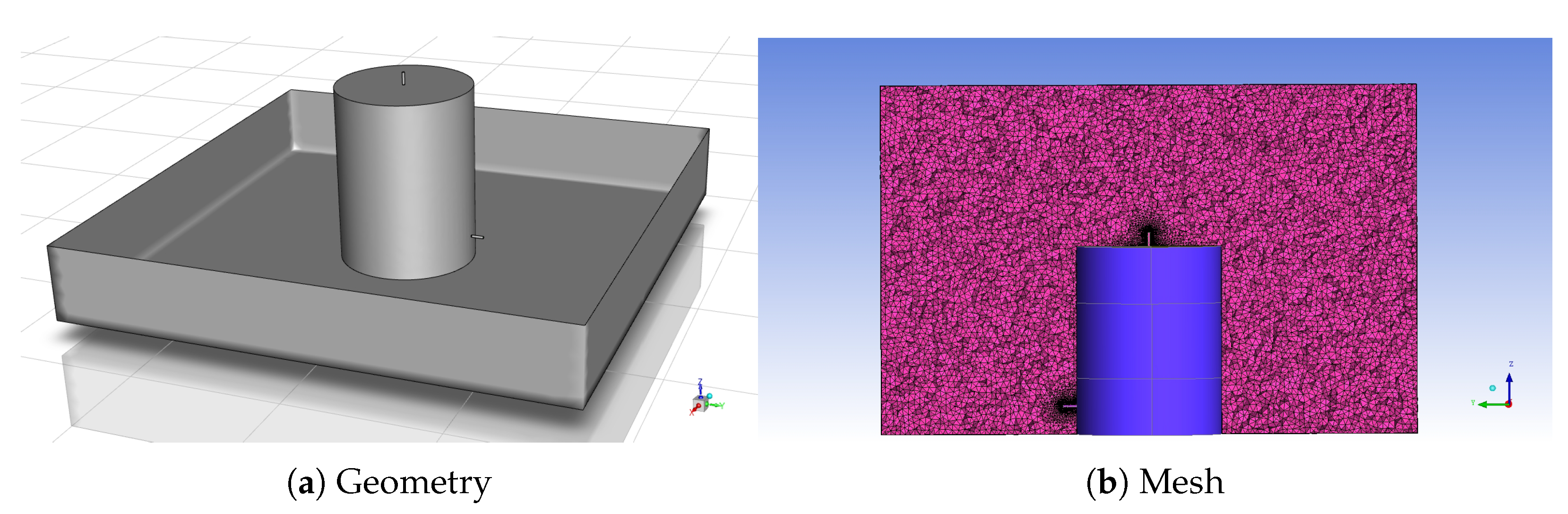


| Tank Height | Domain Size (x, y, z) | Mesh Elements | Tank Diameter | Leak Diameter | |
|---|---|---|---|---|---|
| Case 1 | 1.75 m | 10 m, 10 m, 4.25 m | 3,809,175 | 2.7 m | 50 mm |
| Case 2 | 3.5 m | 10 m, 10 m, 6.5 m | 7,298,610 | ||
| Case 3 | 7.0 m | 10 m, 10 m, 9.5 m | 8,283,985 |
| Location | Case 1 | Case 2 | Case 3 | |||
|---|---|---|---|---|---|---|
| ➀ | 1.0 | 1.18 | 0.7 | 1.27 | 0.5 | 1.44 |
| ➁, ➂ | 2.9 | 3.54 | 2.2 | 3.96 | 1.8 | 5.31 |
| ➃, ➄ | 6.3 | 7.81 | 4.6 | 8.35 | 3.3 | 9.83 |
| ➅, ➆ | 10.9 | 13.62 | 7.5 | 13.66 | 5.3 | 15.83 |
| ➇ | 14.3 | 17.89 | 11.3 | 20.61 | 8.1 | 24.26 |
| Variable | Result Comparison | Case 1 | Case 2 | Case 3 |
|---|---|---|---|---|
| Analytical result | 1.40 | 2.19 | 3.25 | |
| Simulation result | 1.32 | 2.04 | 2.99 |
| Location | Case 1 | Case 2 | Case 3 | |
|---|---|---|---|---|
| () | bottom wall | 743 | 1035 | 4352 |
| bund (side) wall | 95 | 424 | 3545 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Choi, M.; Jo, S. New Developments in Detector and Bund Wall Standards to Mitigate the Risk of Hazardous Liquid Leaks. Processes 2023, 11, 3179. https://doi.org/10.3390/pr11113179
Choi M, Jo S. New Developments in Detector and Bund Wall Standards to Mitigate the Risk of Hazardous Liquid Leaks. Processes. 2023; 11(11):3179. https://doi.org/10.3390/pr11113179
Chicago/Turabian StyleChoi, Minyoung, and Seungbum Jo. 2023. "New Developments in Detector and Bund Wall Standards to Mitigate the Risk of Hazardous Liquid Leaks" Processes 11, no. 11: 3179. https://doi.org/10.3390/pr11113179
APA StyleChoi, M., & Jo, S. (2023). New Developments in Detector and Bund Wall Standards to Mitigate the Risk of Hazardous Liquid Leaks. Processes, 11(11), 3179. https://doi.org/10.3390/pr11113179