
Research on the Desired Dynamic Selection of a Reference Model-Based PID Controller: A Case Study on a High-Pressure Heater in a 600 MW Power Plant



Abstract
:1. Introduction
- Using most engineering tuning methods, such as the Z-N method, the closed-loop response may exhibit a large overshoot and long settling time, which brings potential challenges to the longevity of the actuator and the safe operation of the unit [25];
- Plant model-based tuning methods need a time-consuming identification process and will obtain poor performance when the model is mismatched [26];
- Only simple control algorithms, such as integral and derivative, can be implemented on the distributed control system (DCS) [27].
- A practical selection procedure of the desired dynamic equation of DDE PI or PID is summarized without using accurate plant models for practitioners;
- Based on the proposed selection procedure, DDE PI is first applied to the control of a practical thermal process: the level of a high-pressure (HP) heater in a 600-MW coal-fired power plant.
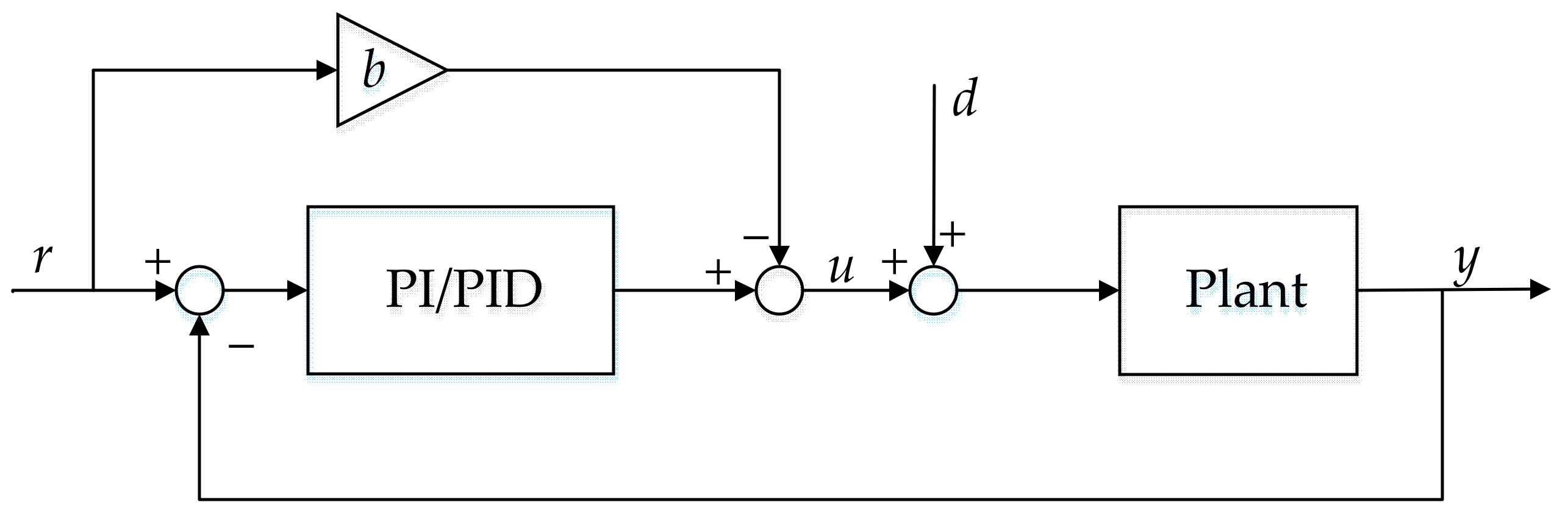
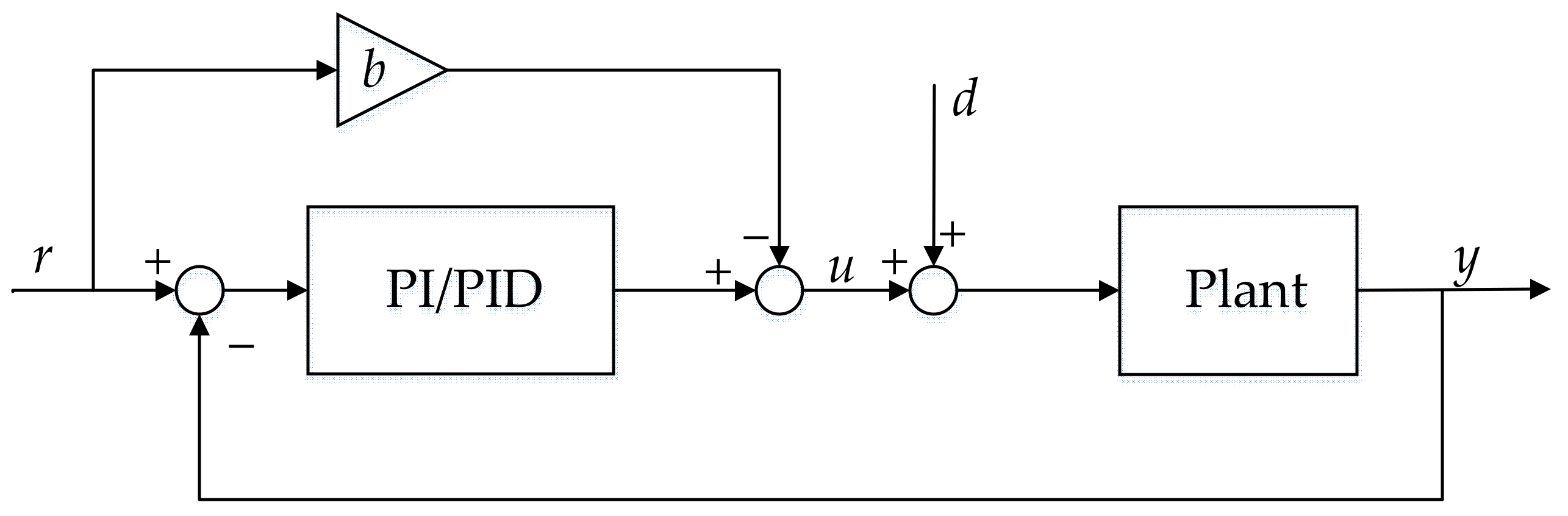
2. DDE PI or PID
- The relative degree n is known;
- The general system is a minimum-phase plant;
- The sign of the high-frequency gain H is known;
- The denominator and the numerator of the general system are relatively prime, and the unobservable and uncontrollable modes are asymptotically stable.
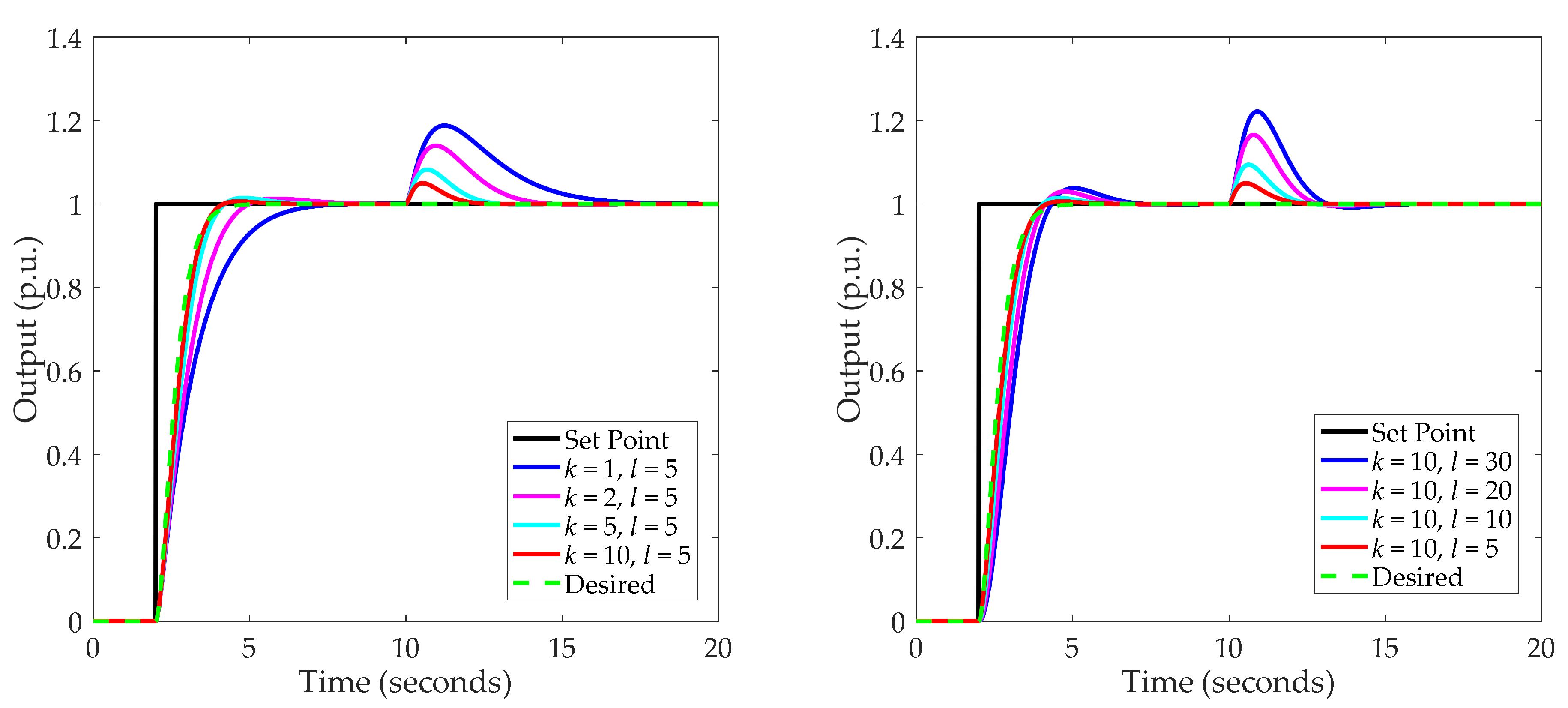
3. The Influence of Parameters of DDE PI or PID on Control Performance
4. The Desired Dynamic Selection of DDE PI and PID
4.1. The Initialization of Controller Parameters
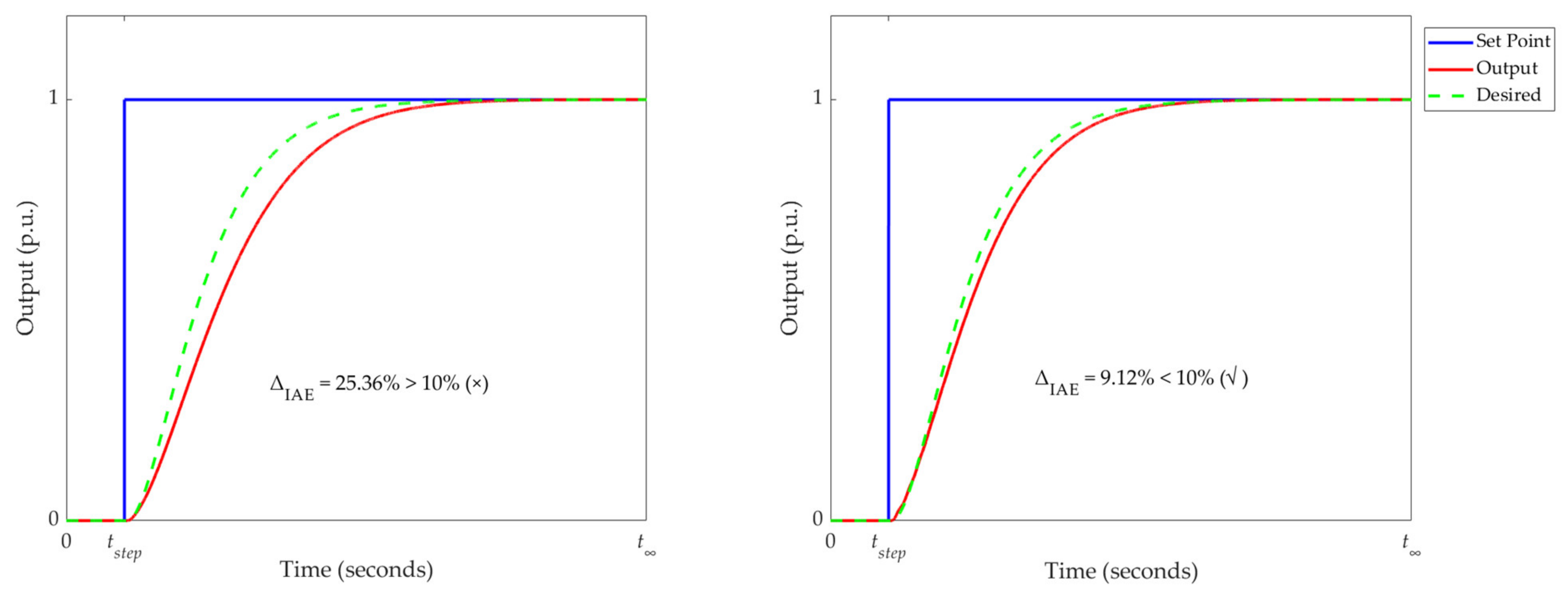
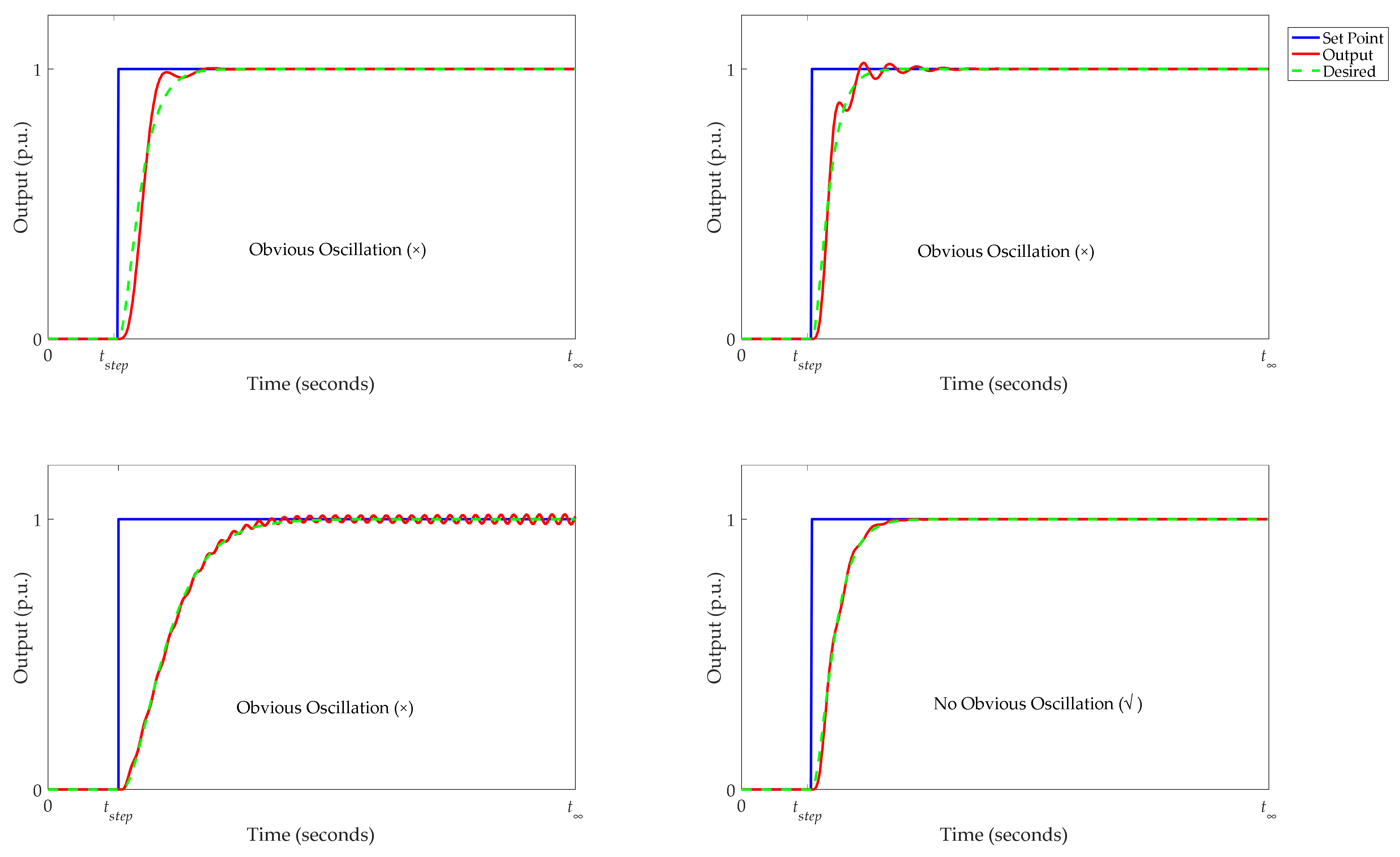
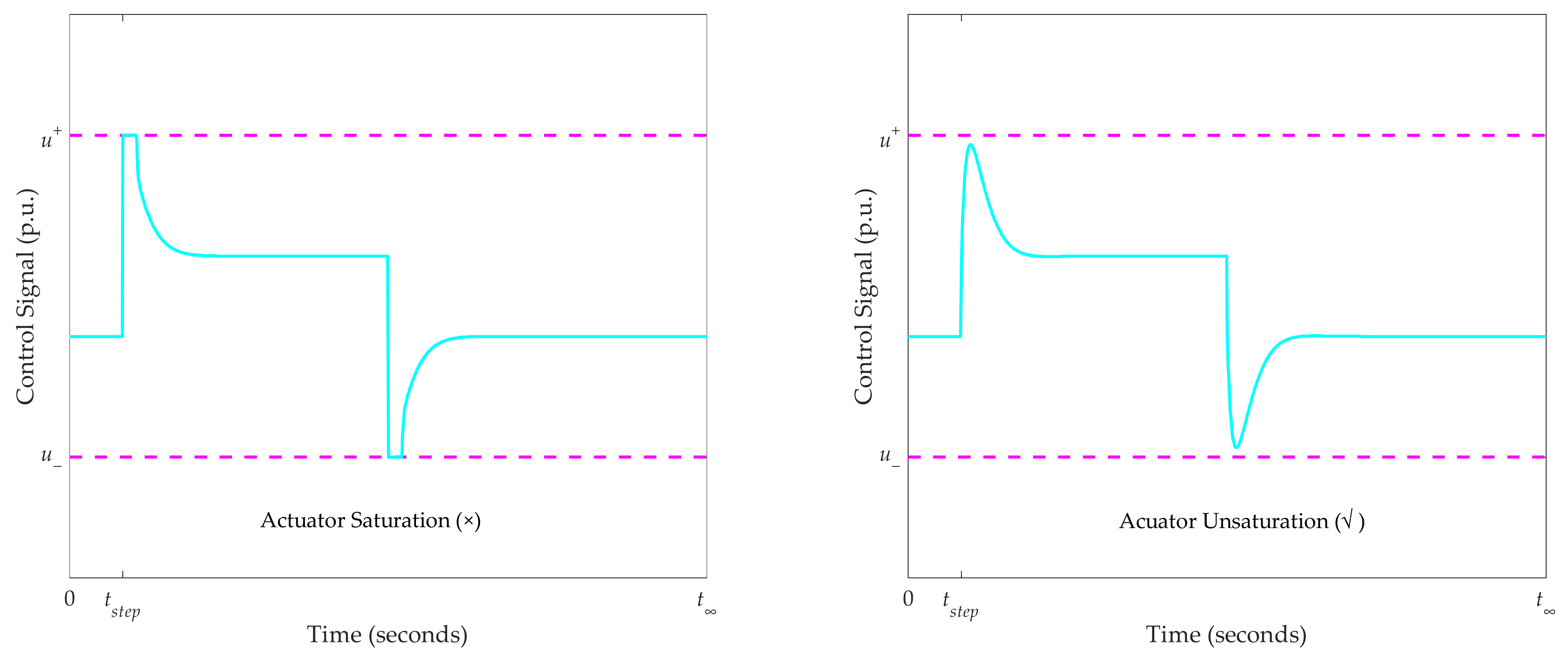
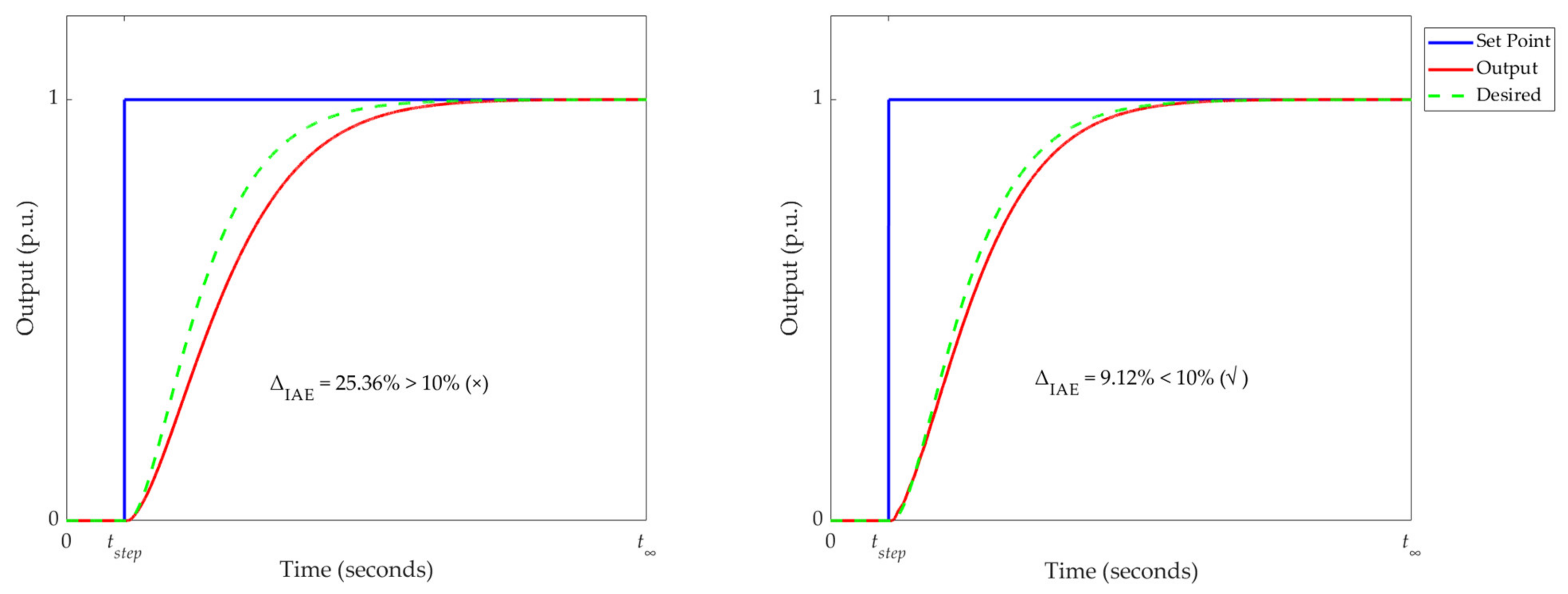
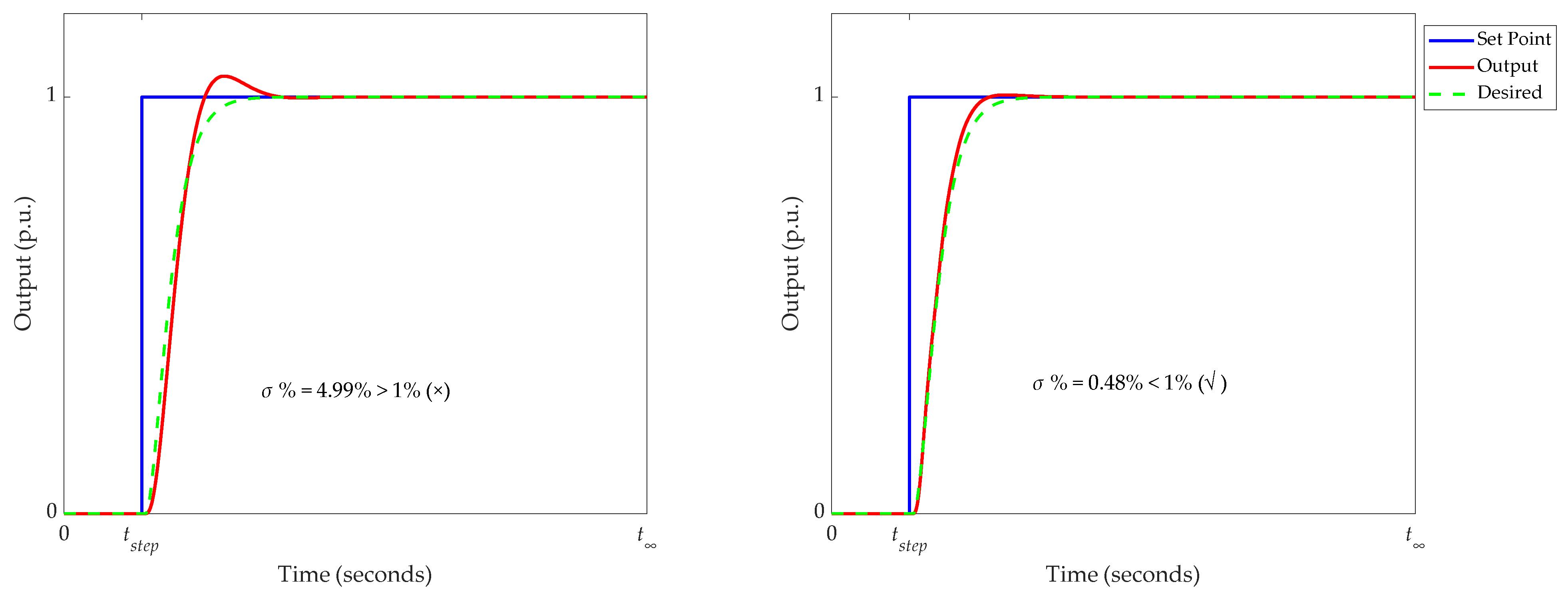
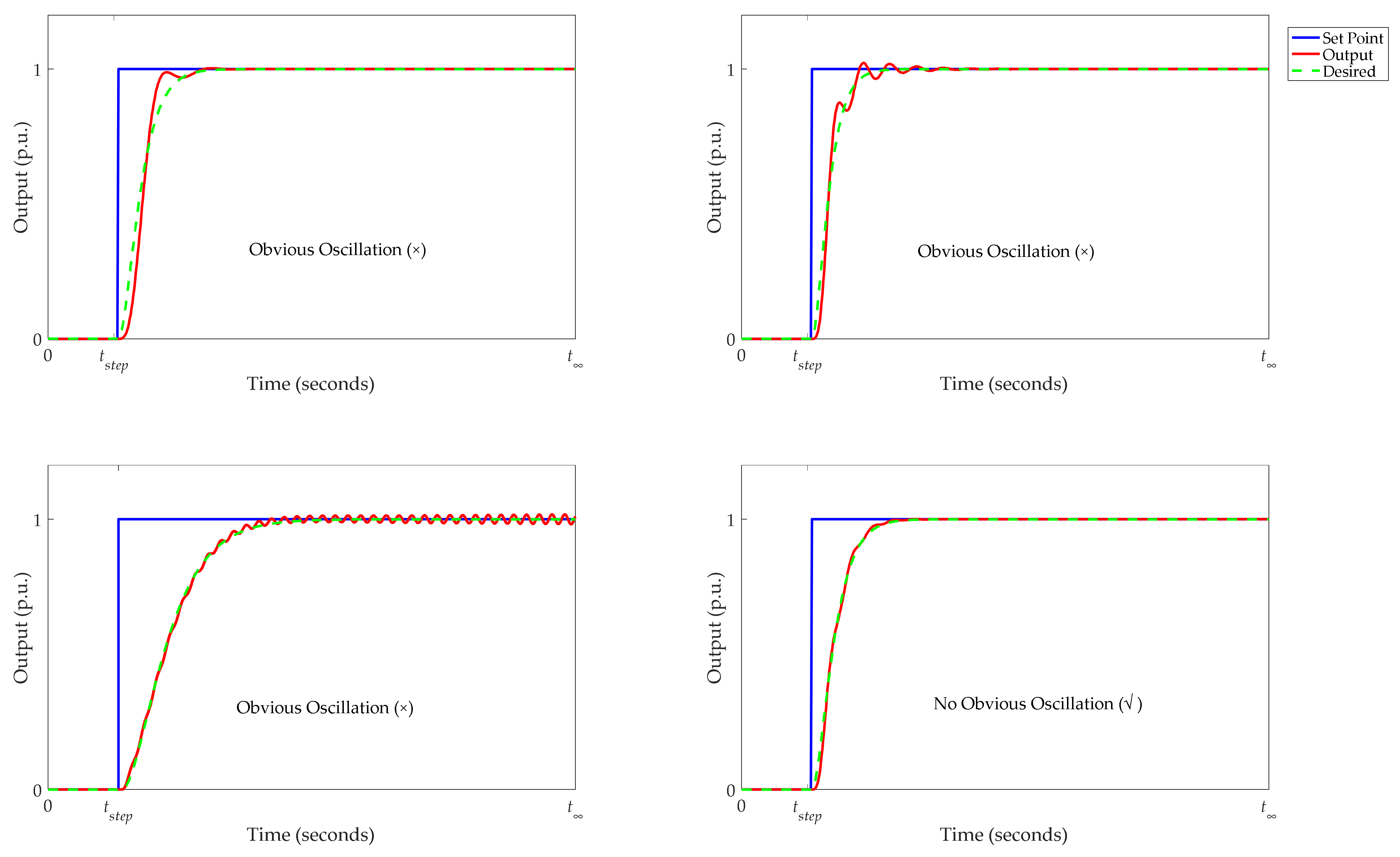
4.2. The Criteria of Tracking the Desired Dynamic Response
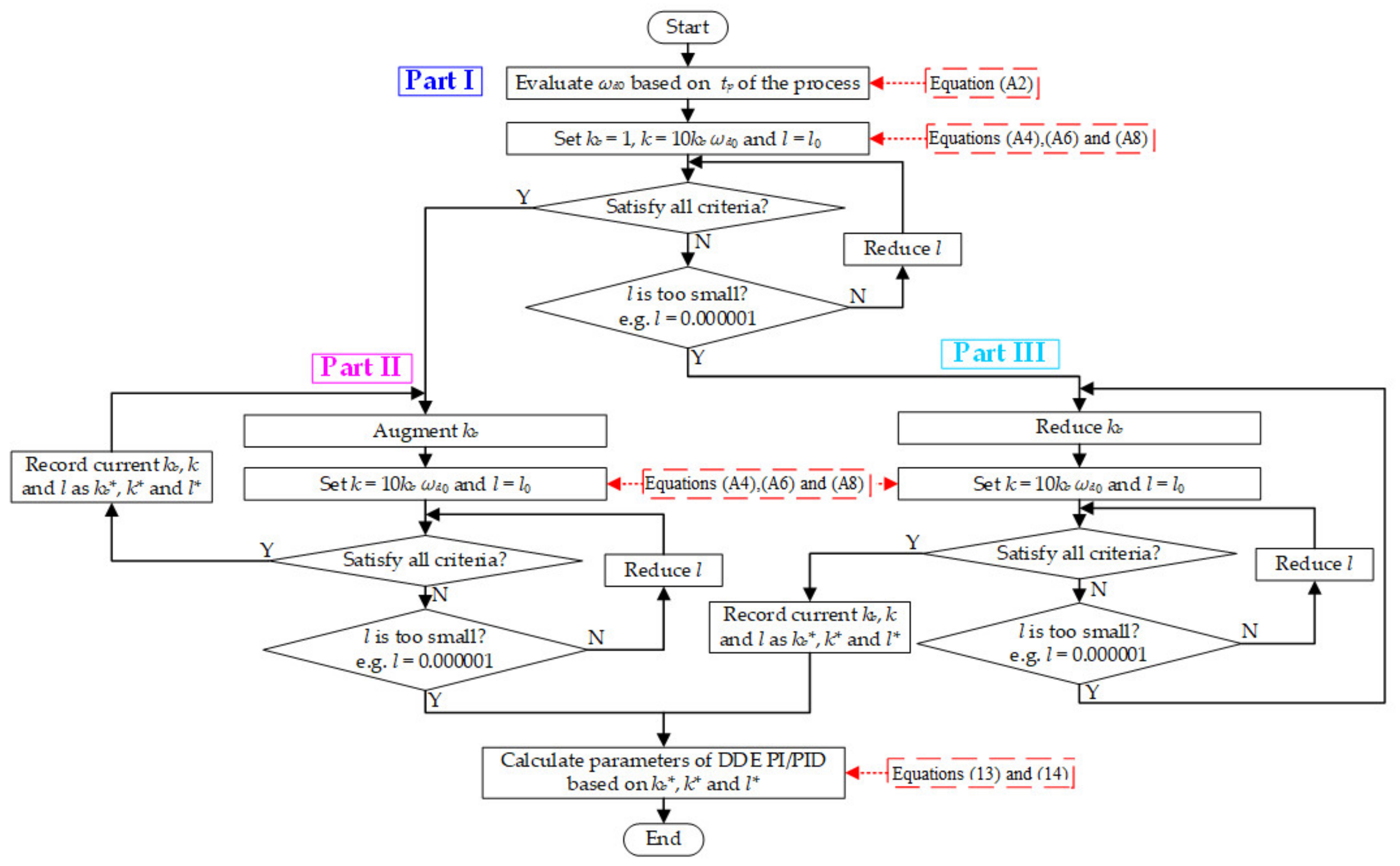
4.3. The Selection Procedure of the Desired Dynamic Equation
- The reference tracking speed is as fast as possible;
- The closed-loop output tracks the desired dynamic response accurately.
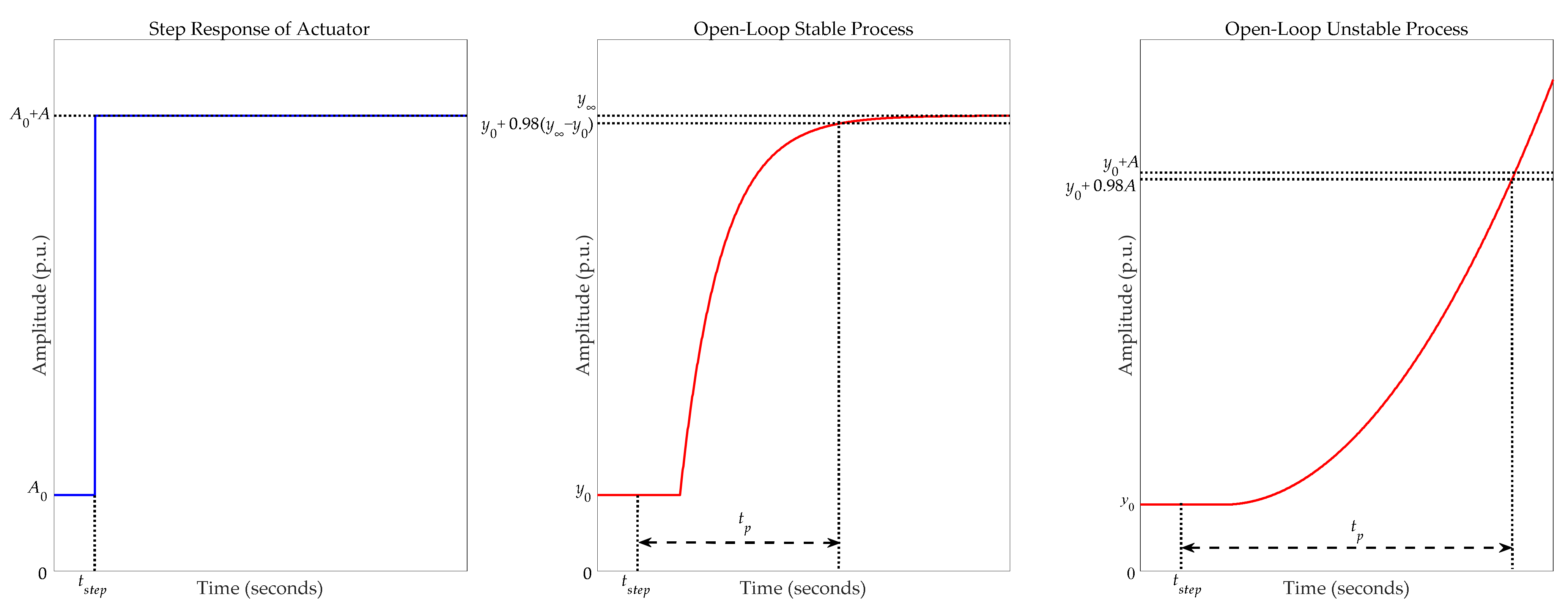
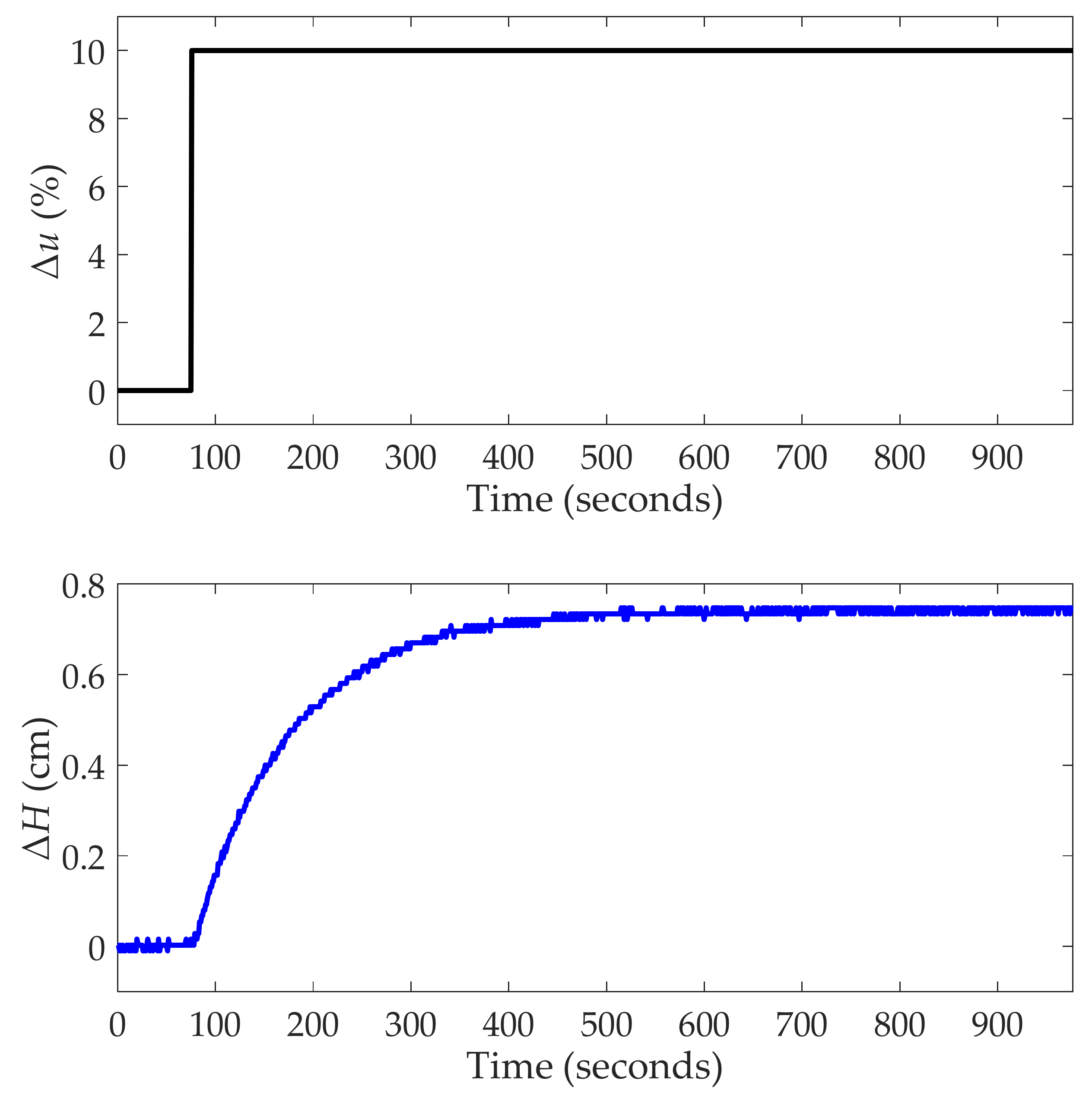
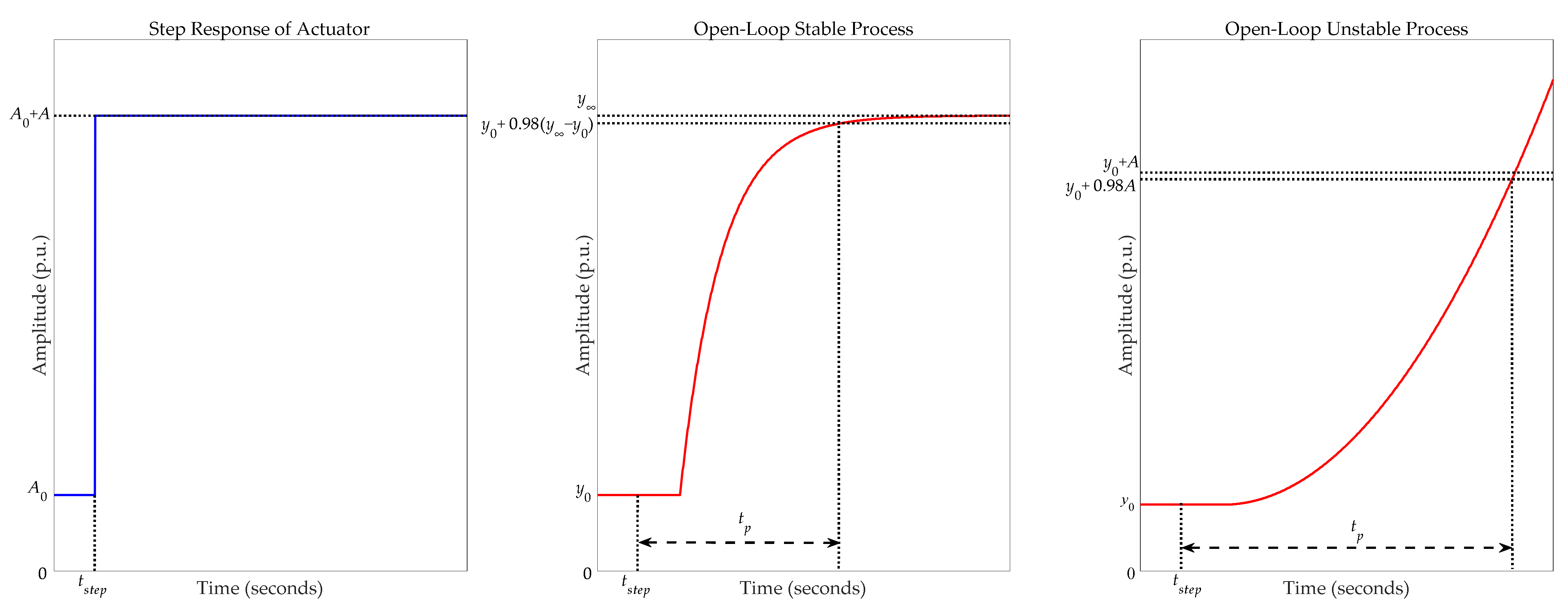
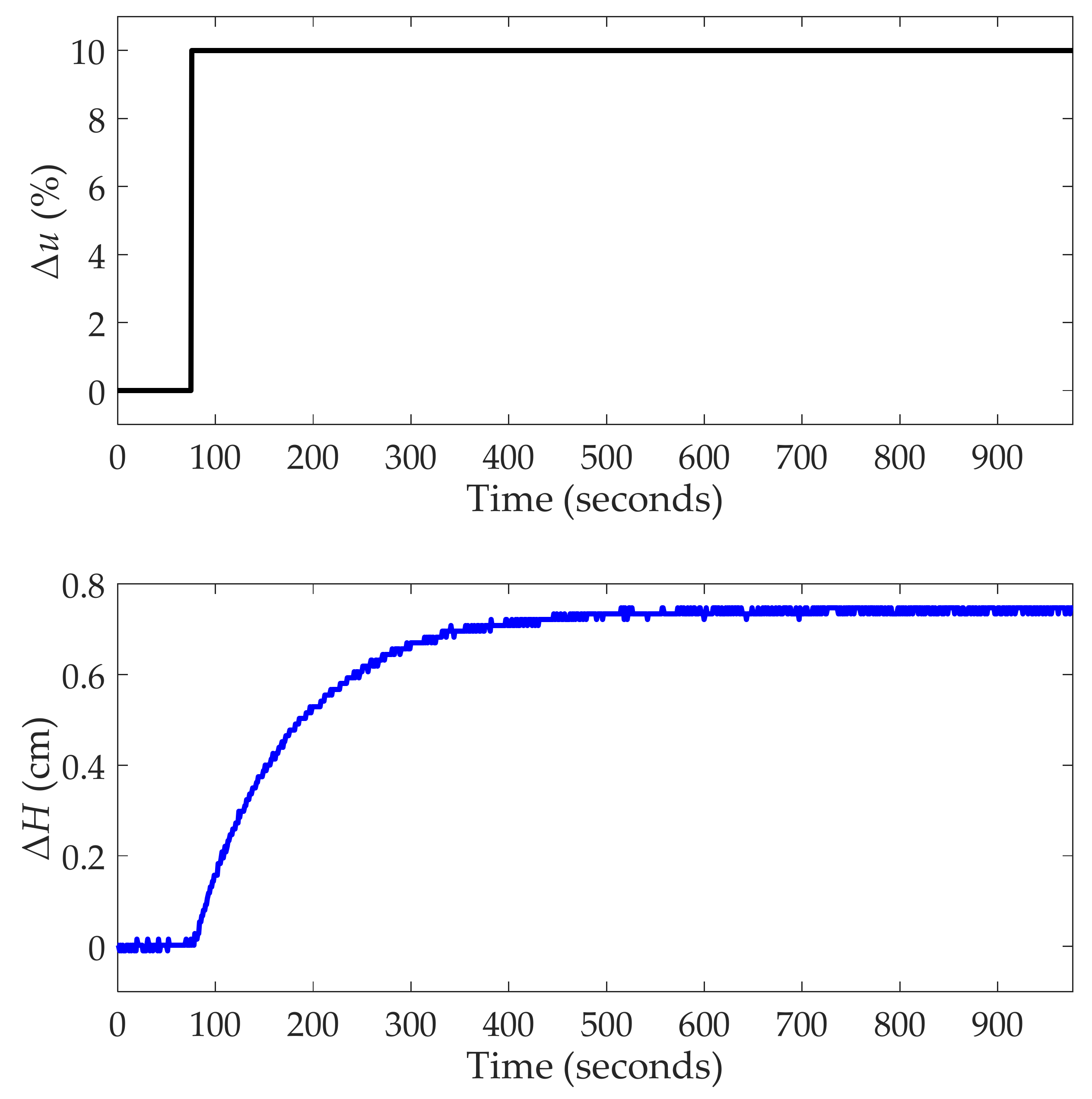
- Obtain the gain and the time scale of the process based on the open-loop test;
- Calculate the initial values of the parameters of DDE PI or PID;
- Tune DDE PI or PID based on the proposed desired dynamic selection procedure.
- Step 1: Evaluate ωd0 based on the tp of the process according to Equation (27);
- Step 2: Set kb = 1, k = 10kbωd0 and l = l0;
- Step 3: Judge whether all criteria are satisfied. If satisfied, terminate the procedure of Part I and turn to that of Part II. If not, proceed to Step 4;
- Step 4: Judge whether l is too small (e.g., l = 0.000001). If l is too small, terminate the procedure of Part I and turn to that of Part III. If not, reduce l and go back to Step 3.
- Step 1: Augment kb;
- Step 2: Set k = 10kbωd0 and l = l0;
- Step 3: Reduce l;
- Step 4: Judge whether all criteria are satisfied. If satisfied, record the current kb, k and l as kb*, k* and l*, and then repeat Steps 1–4. If not, proceed to Step 5;
- Step 5: Judge whether l is too small (e.g., l = 0.000001). If l is too small, repeat Steps 1–4. If not, repeat Steps 3–4.
- Step 1: Reduce kb;
- Step 2: Set k = 10kbωd0 and l = l0;
- Step 3: Reduce l;
- Step 4: Judge whether all criteria are satisfied. If satisfied, record the current kb, k and l as kb*, k* and l*, and calculate the parameters of DDE PI or PID. Then, terminate the desired dynamic selection procedure. If not, proceed to Step 5.
- Step 5: Judge whether l is too small (e.g., l = 0.000001). If l is too small, calculate the parameters of DDE PI or PID based on kb*, k* and l*, and terminate the desired dynamic selection procedure. If not, repeat Steps 3–4.
- If the process has a negative gain, the absolute value of l should be reduced;
- In terms of numerical simulations, kb can be augmented or reduced by 0.01 or 0.001; However, as for field tests on the coal-fired power plants, kb is recommended to be augmented by 1 and reduced by 0.1 due to the limited time;
- Using the proposed procedure, the limit of tracking the desired dynamic response is able to be found for the determined criteria;
- Based on the proposed method, DDE PI or PID is tuned without using any specific plant model but the time scale of the process;
- The systematic selection of the optimum set of PID parameters has therefore been categorized as a non-deterministic polynominal (NP) time-hard problem in terms of complexity [26,47]. Nevertheless, in terms of the proposed procedure, only one parameter, l, is being tuned monotonously for DDE PI or PID, which reduces the complexity of PID tuning.
5. Illustrative Examples
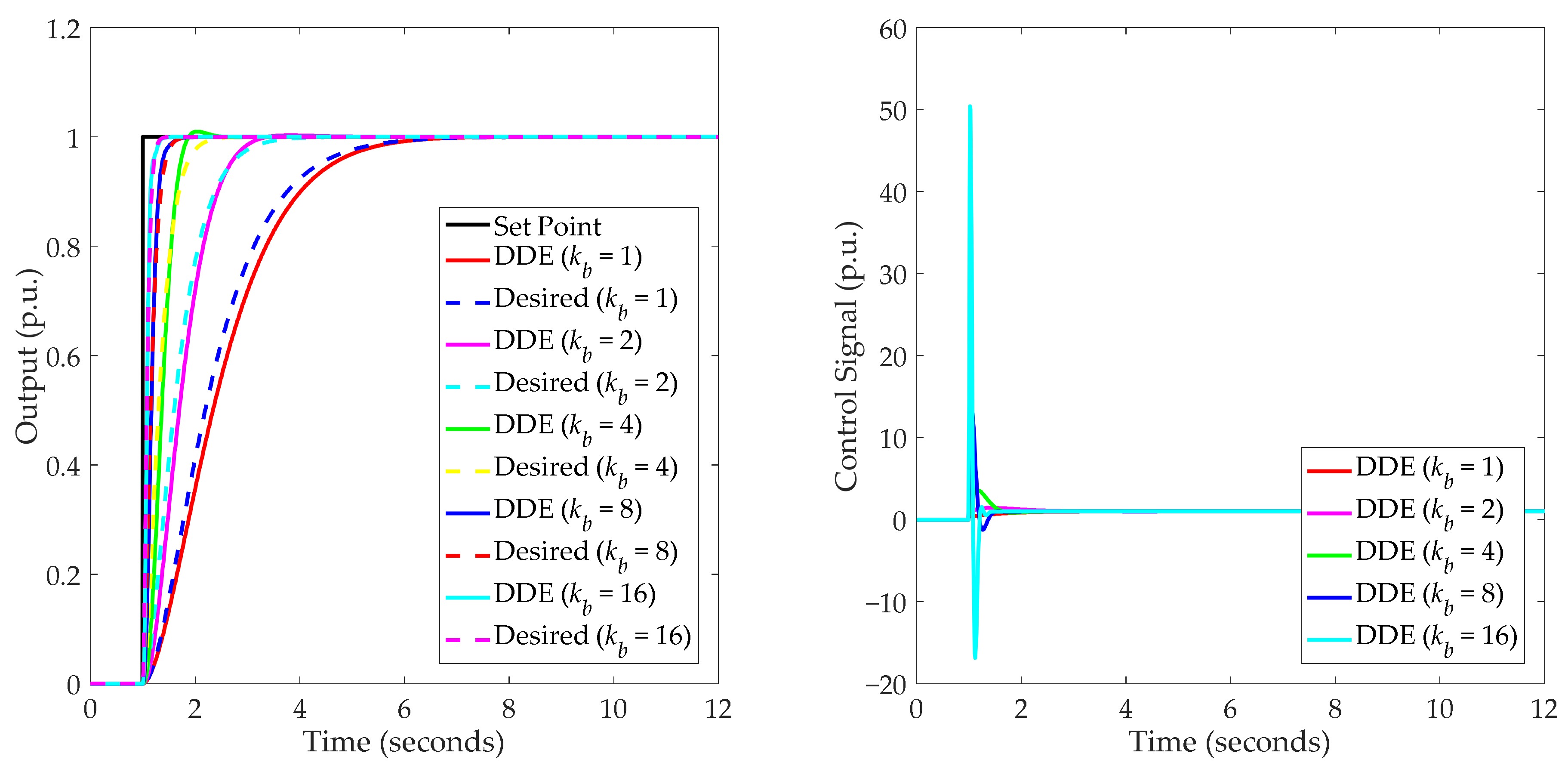
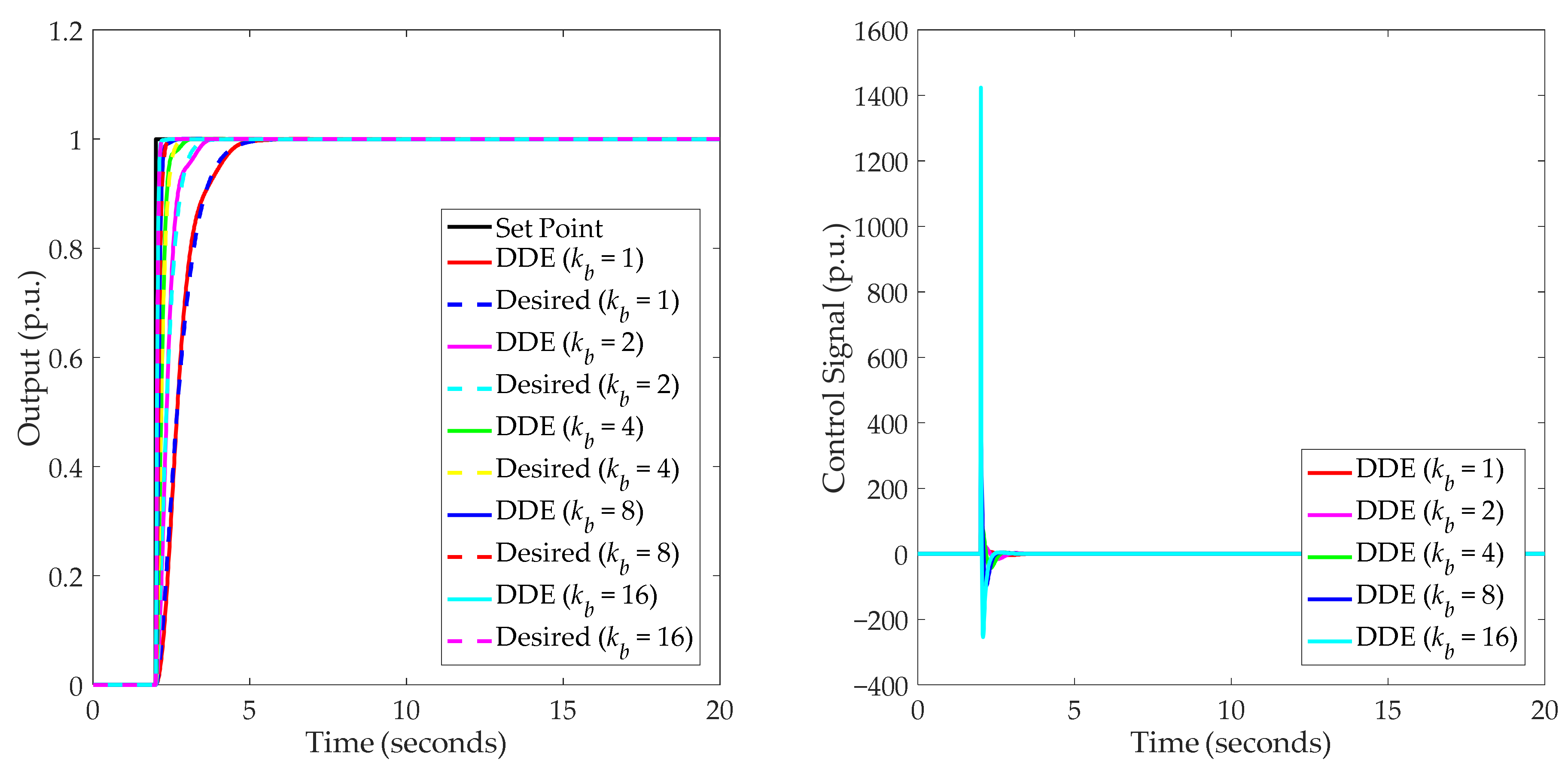
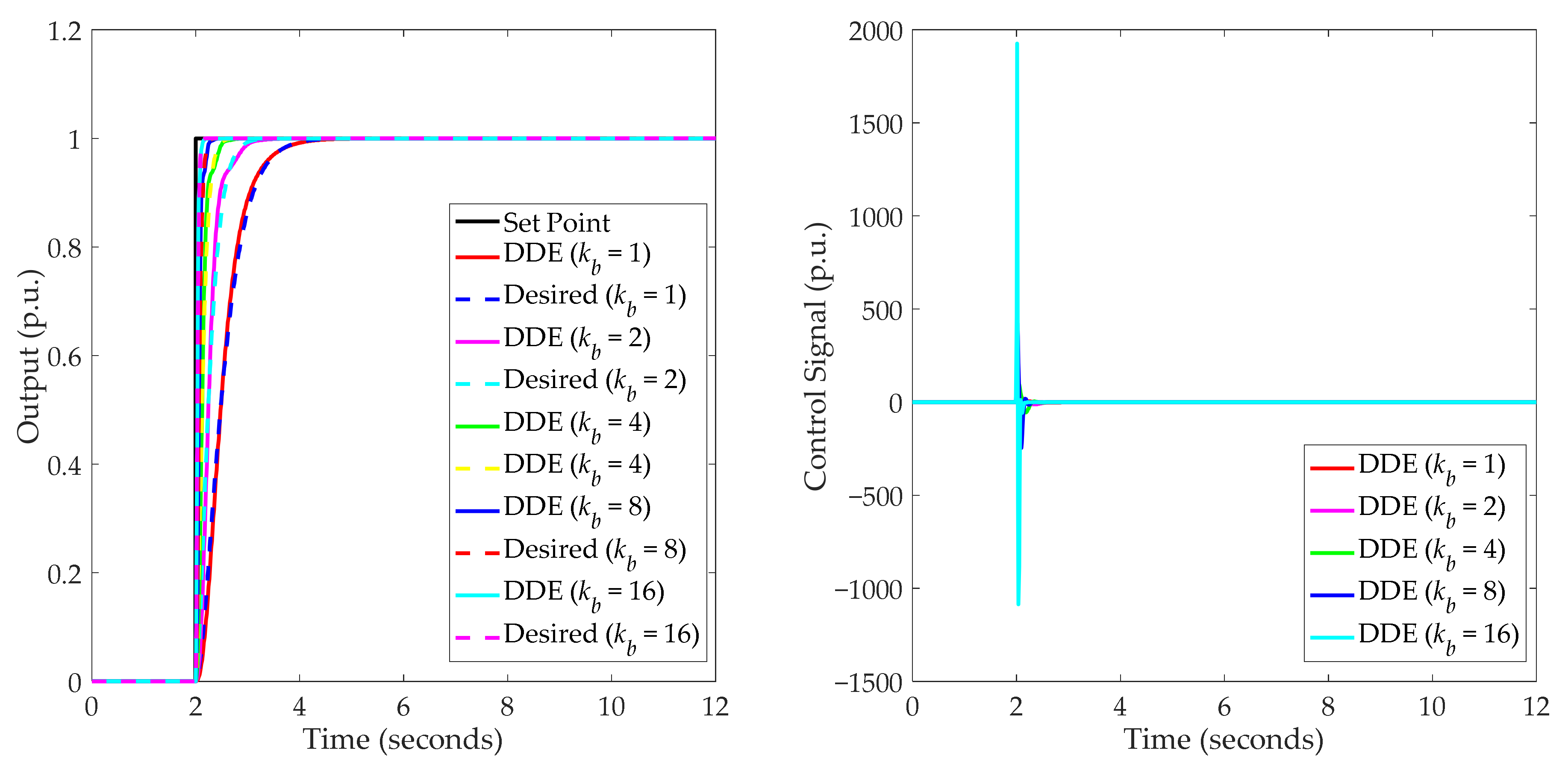
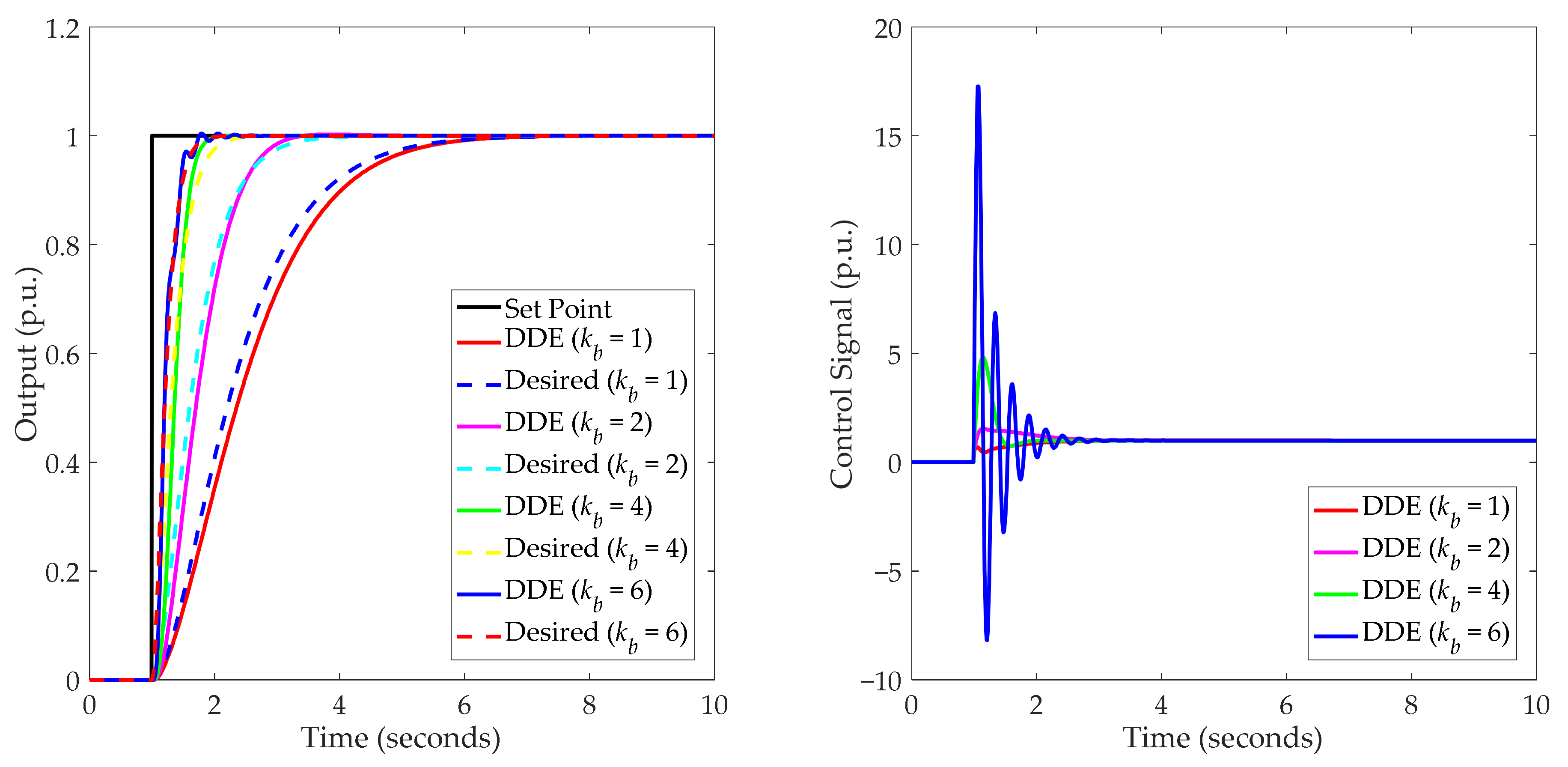
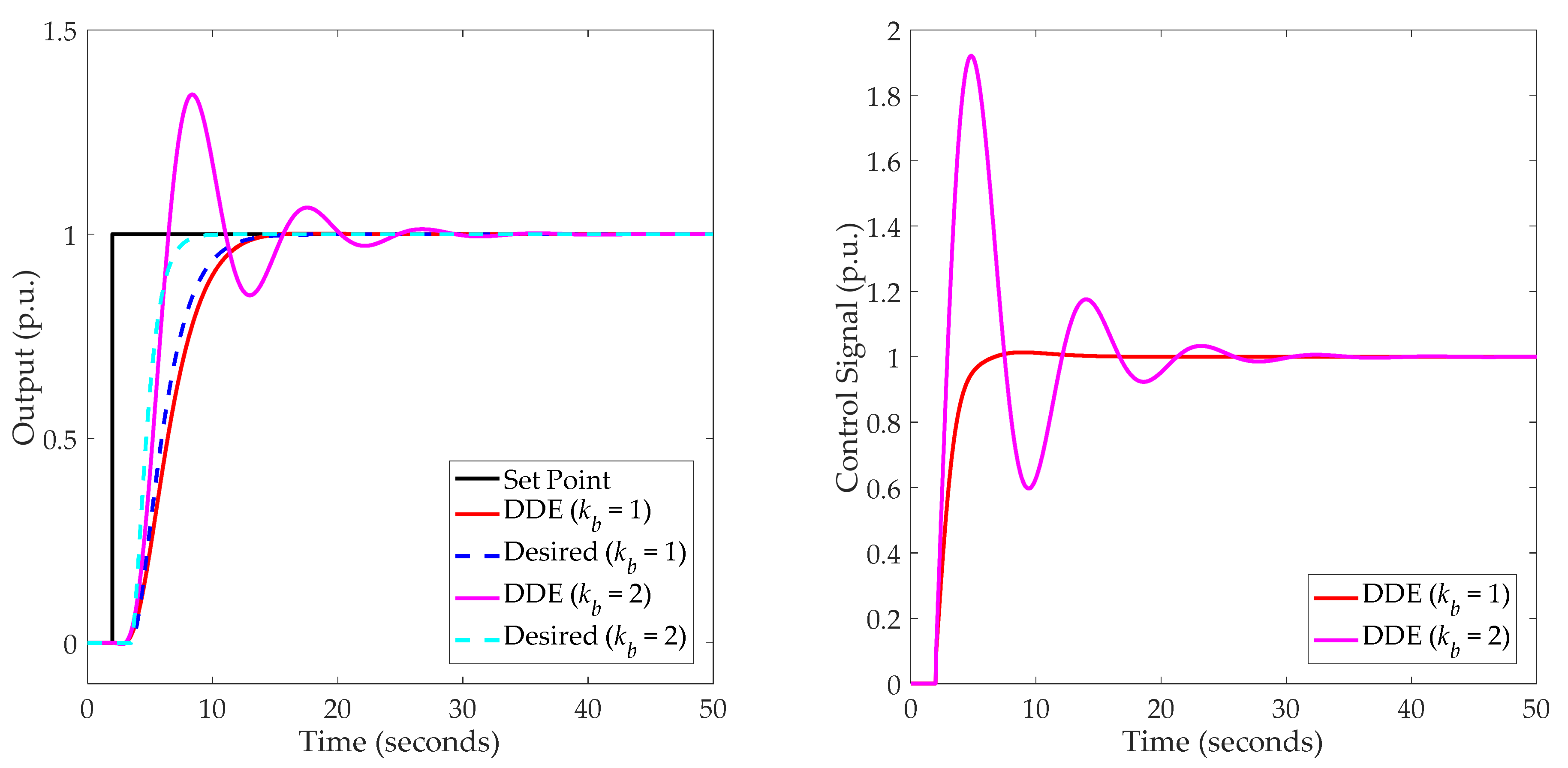
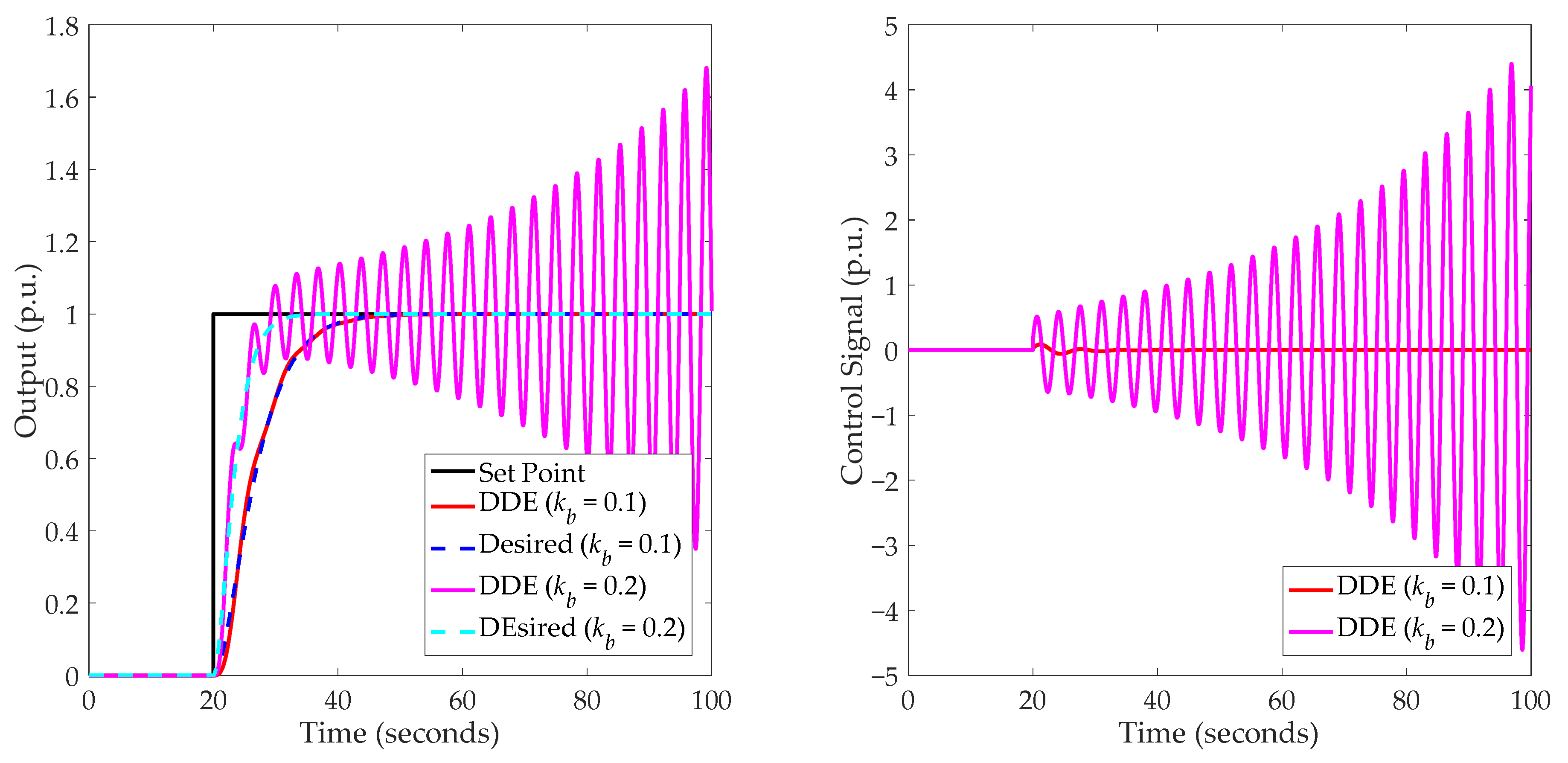
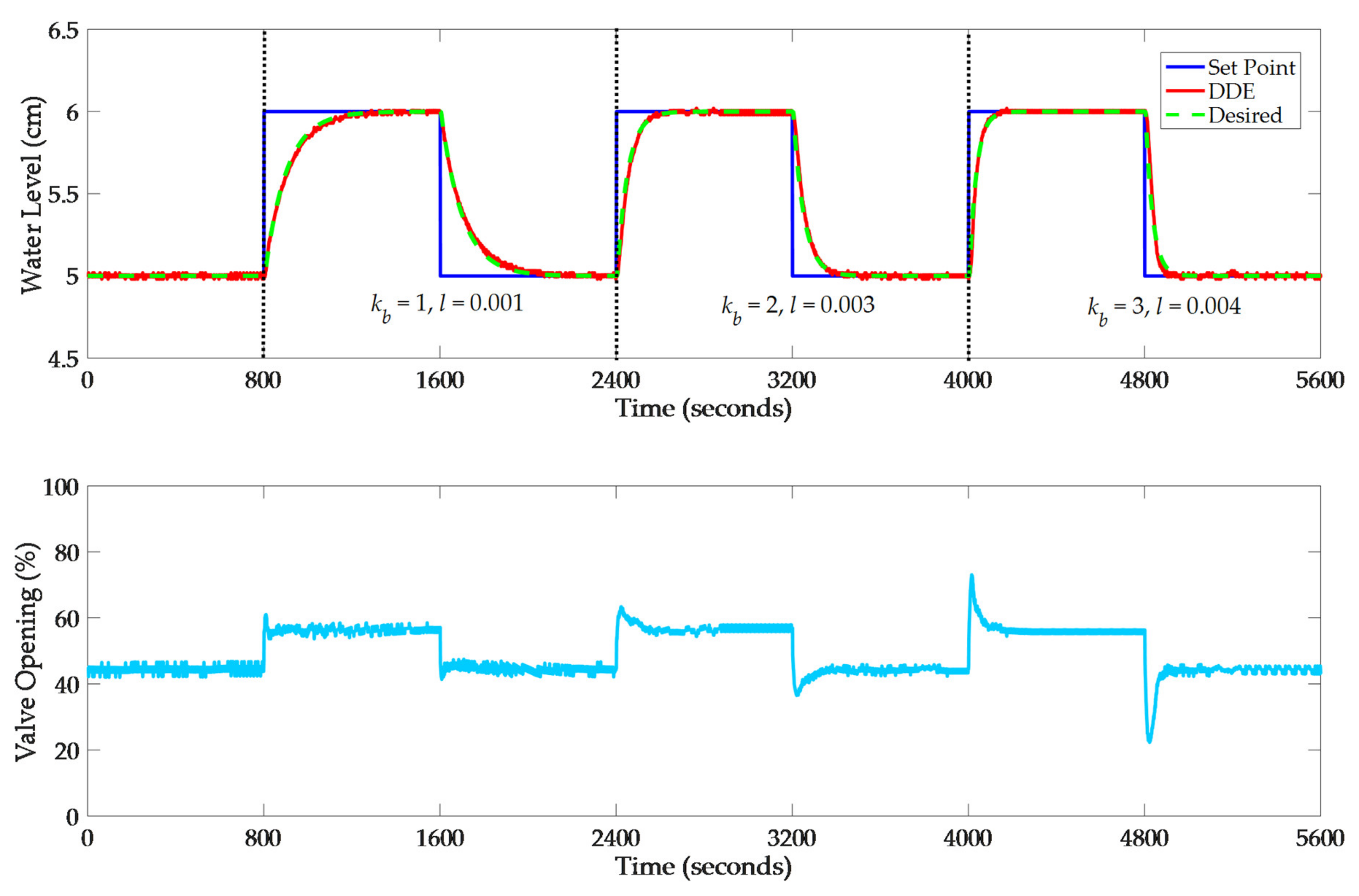
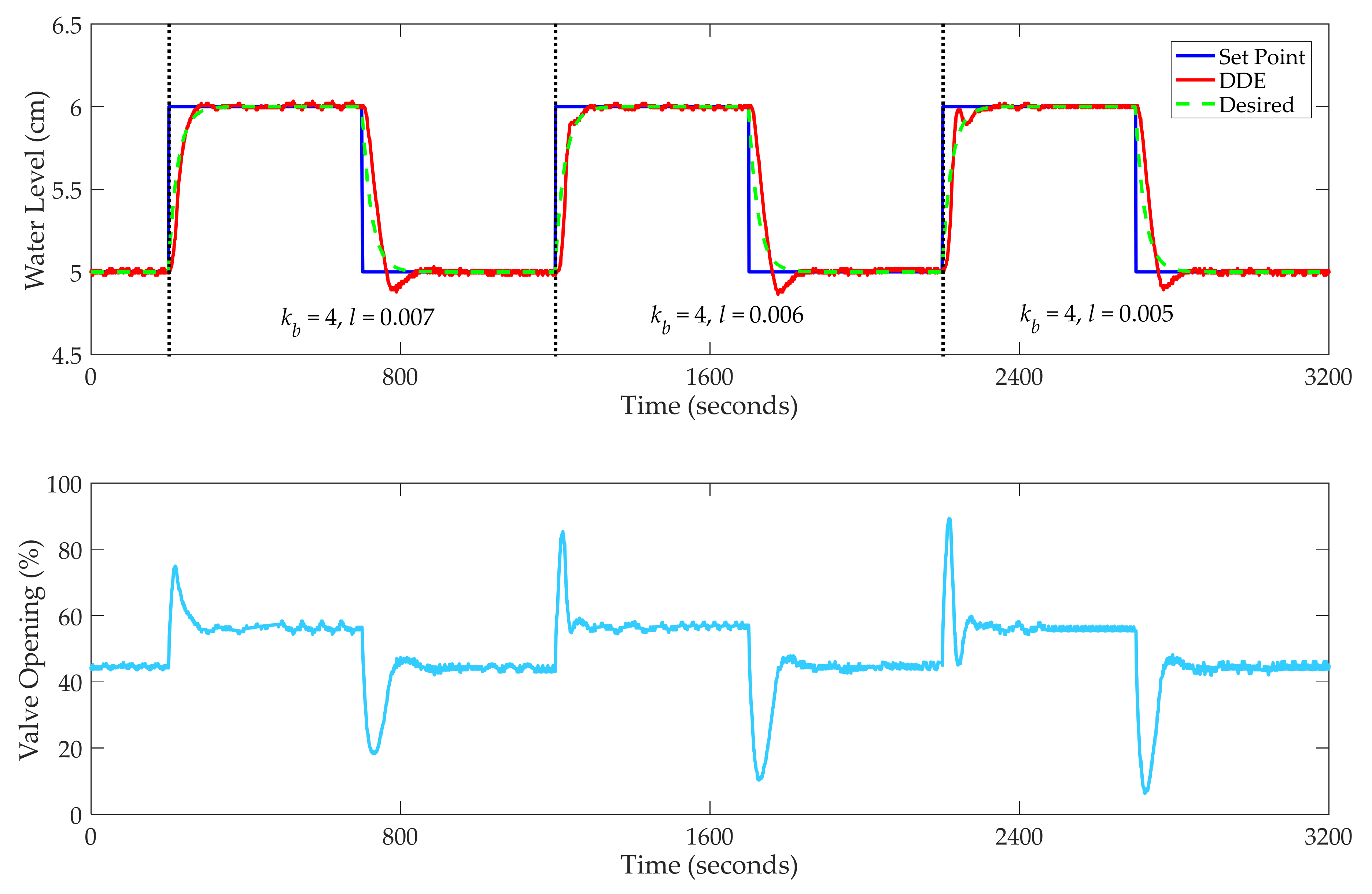
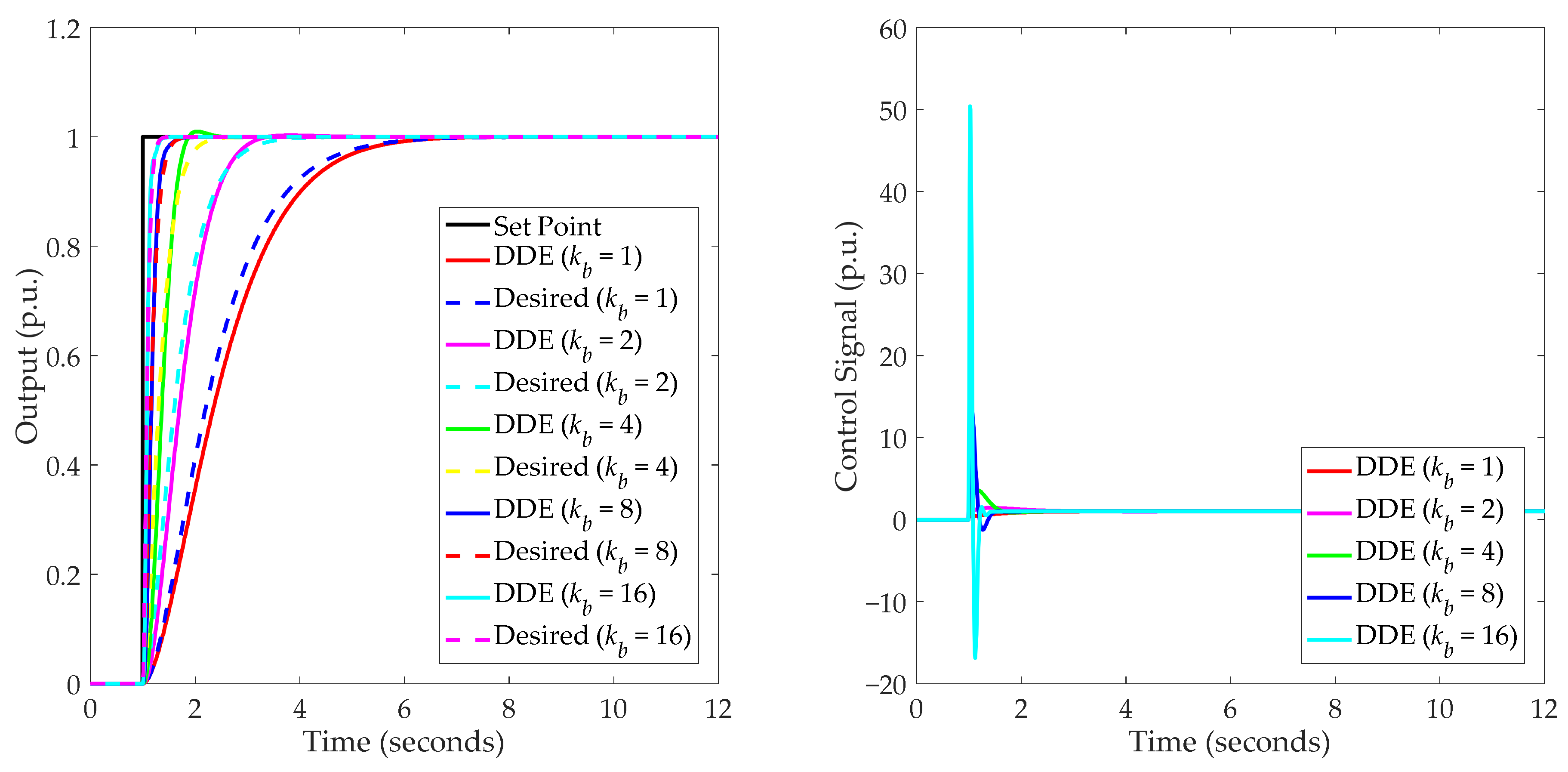
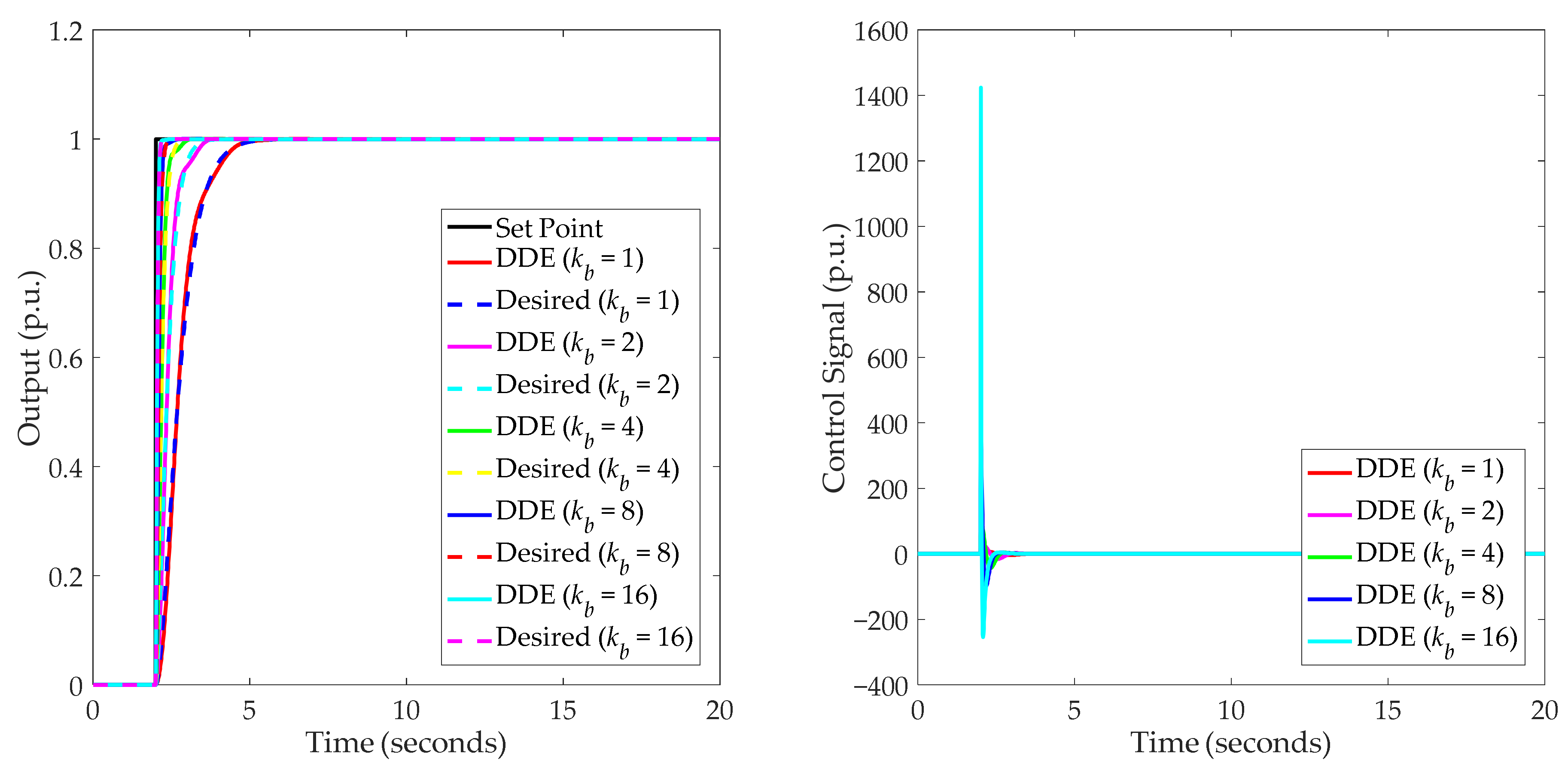
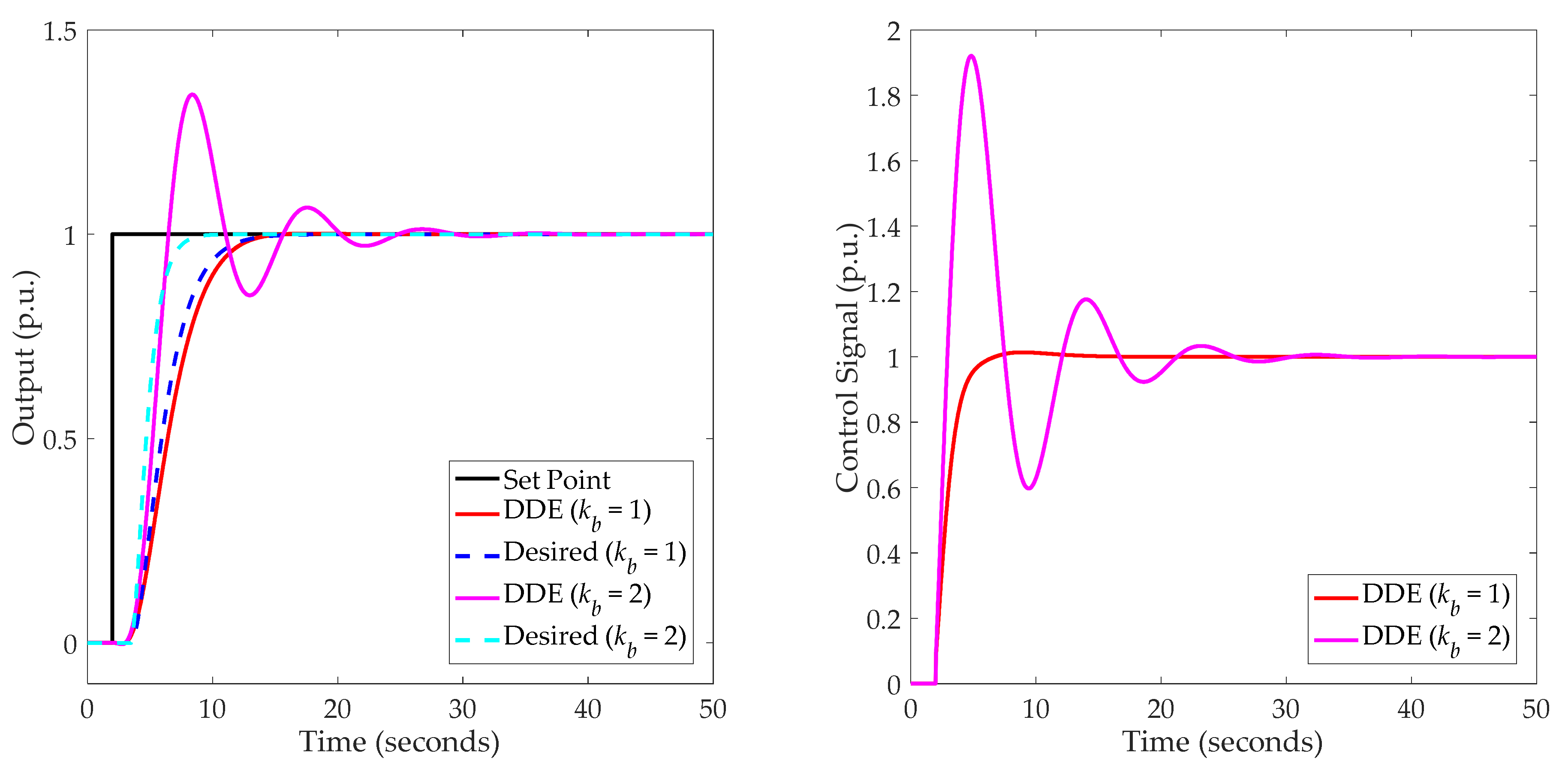
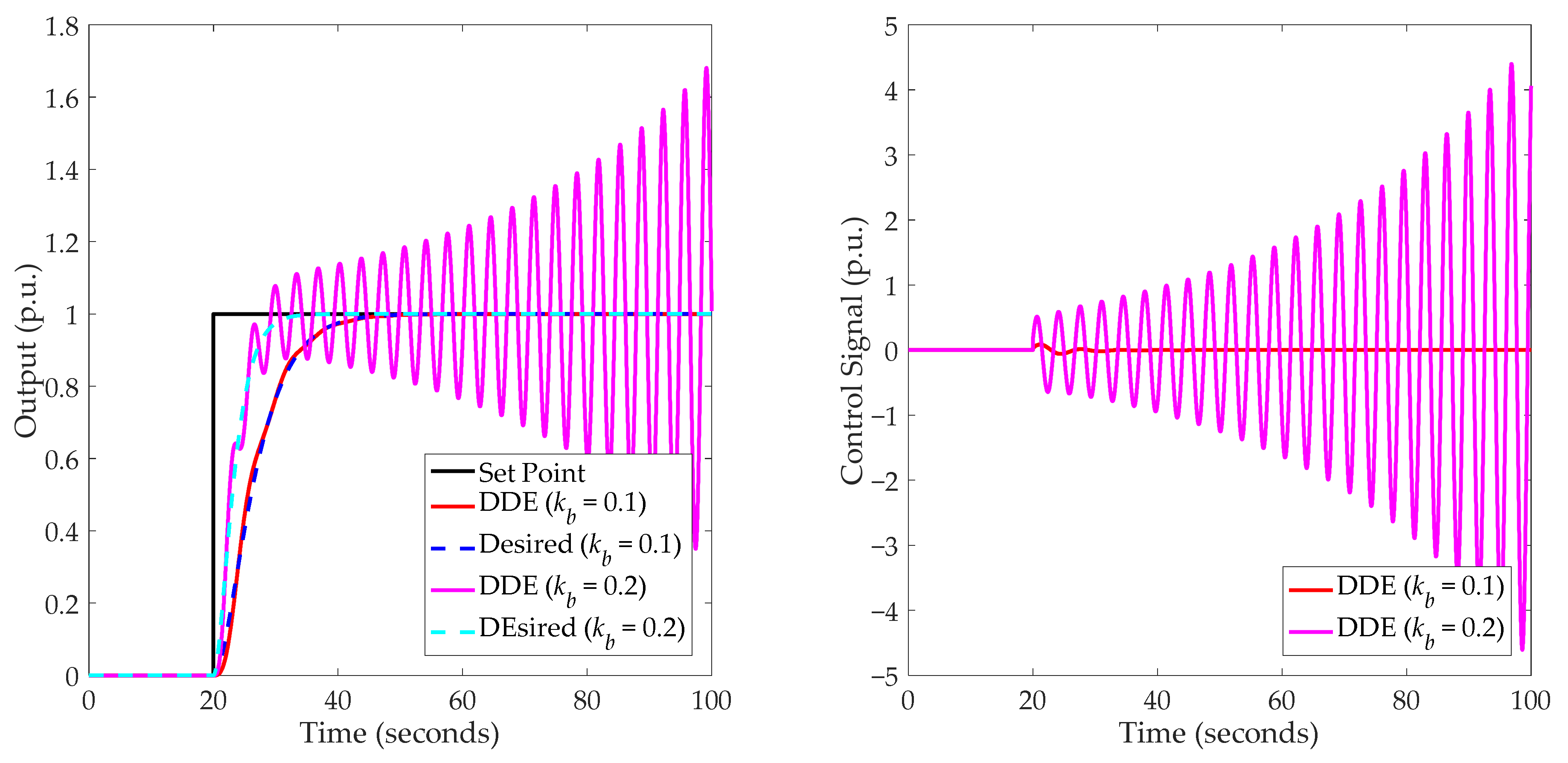
5.1. The Limit of Desired Dynamic Selection
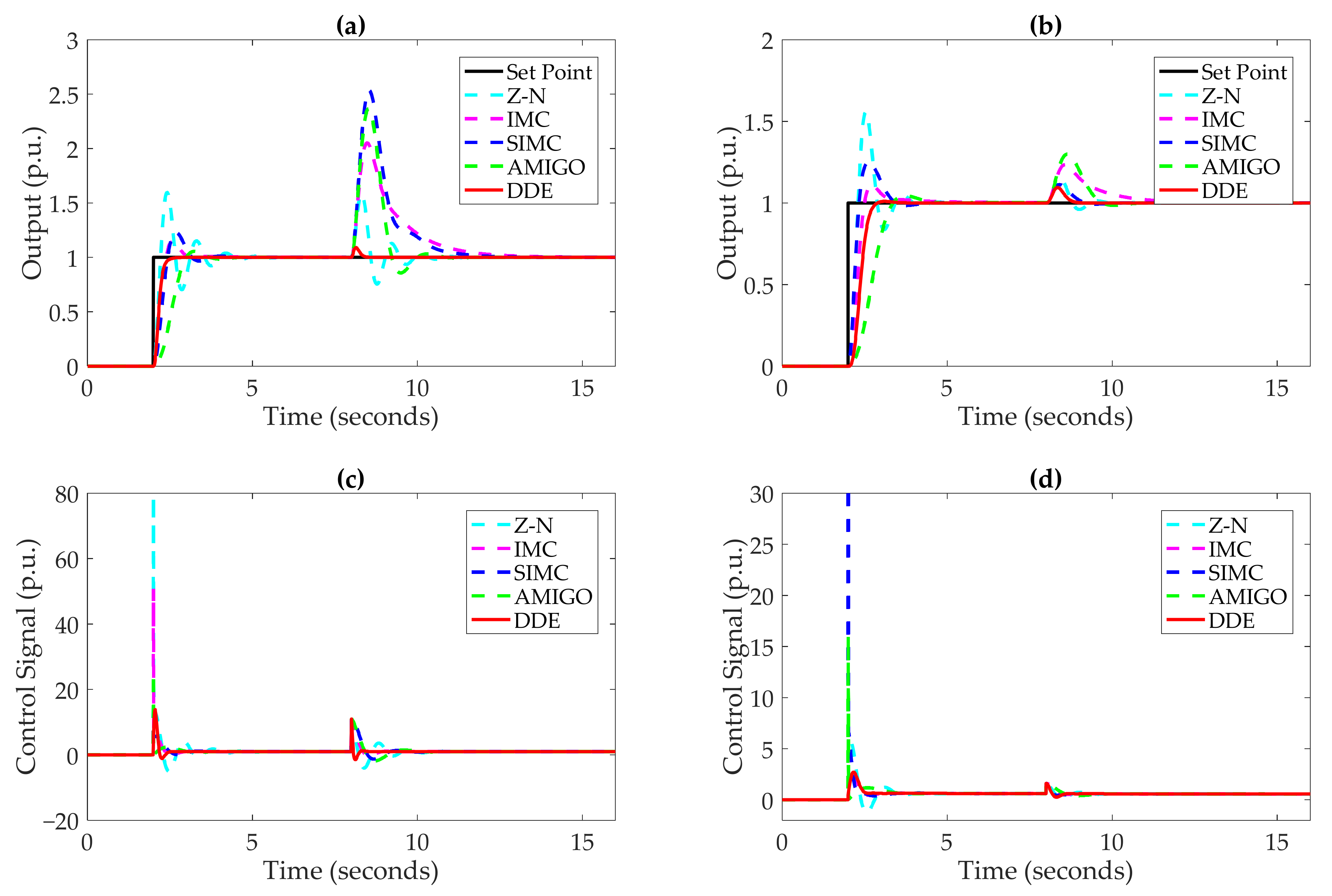
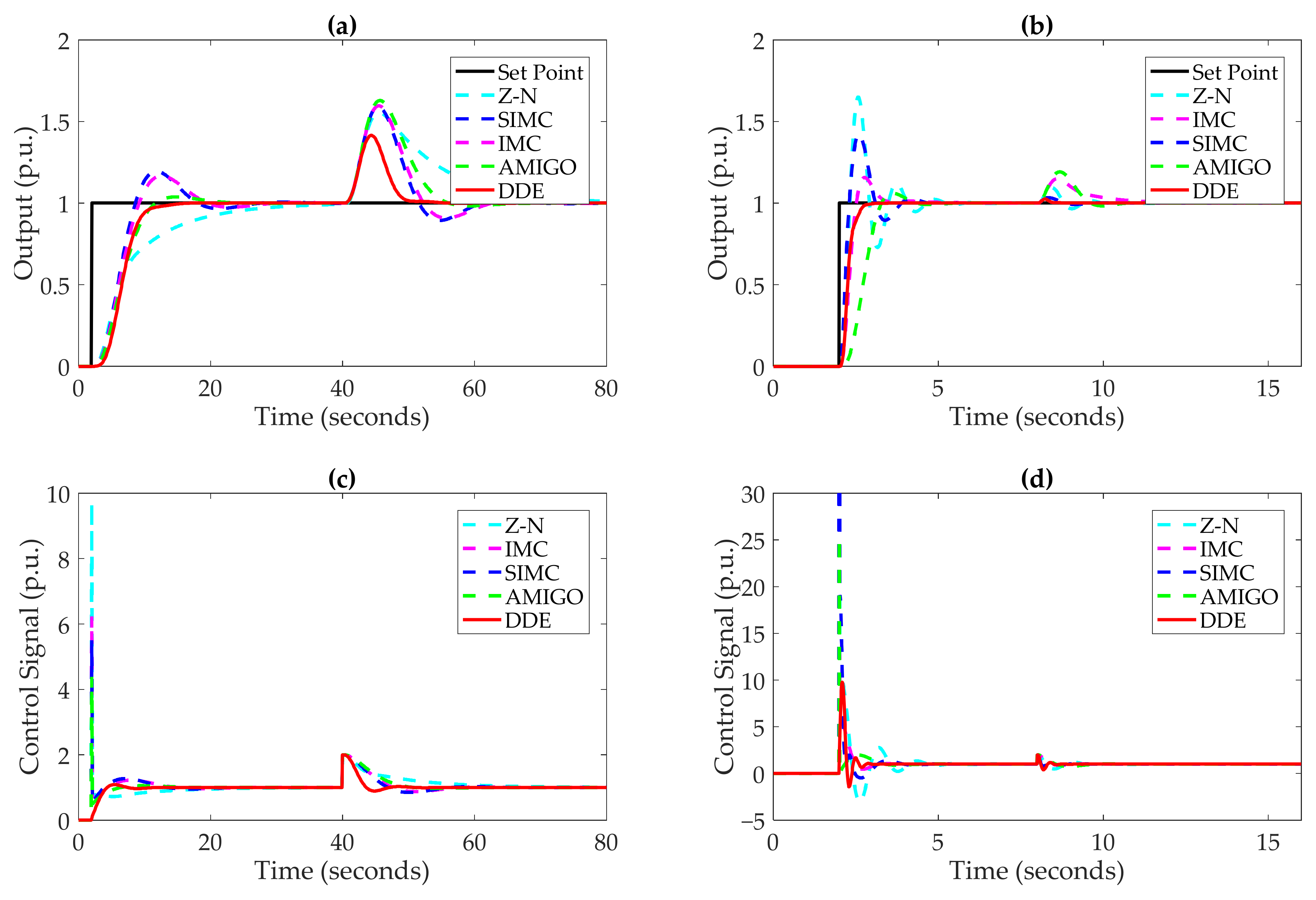
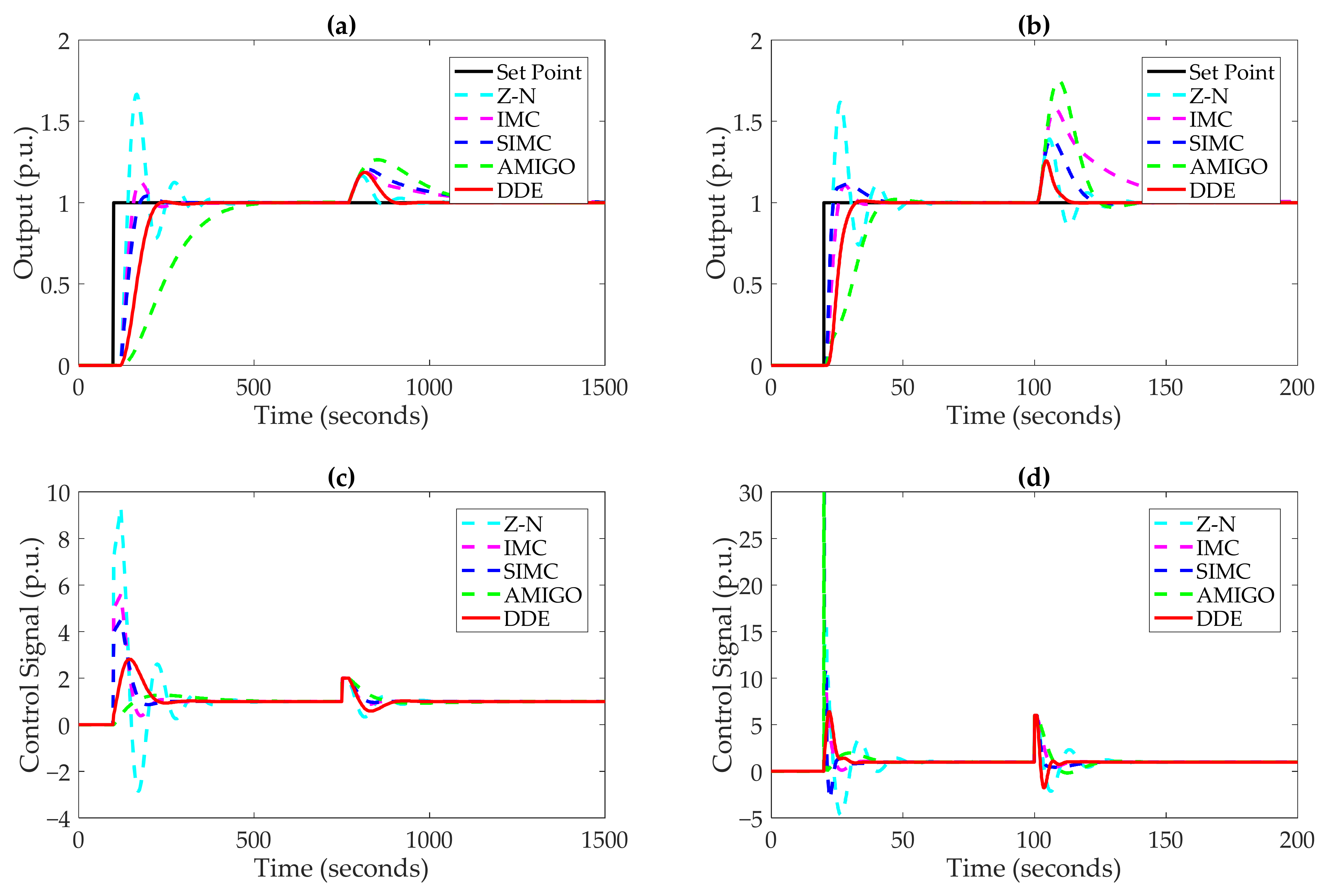
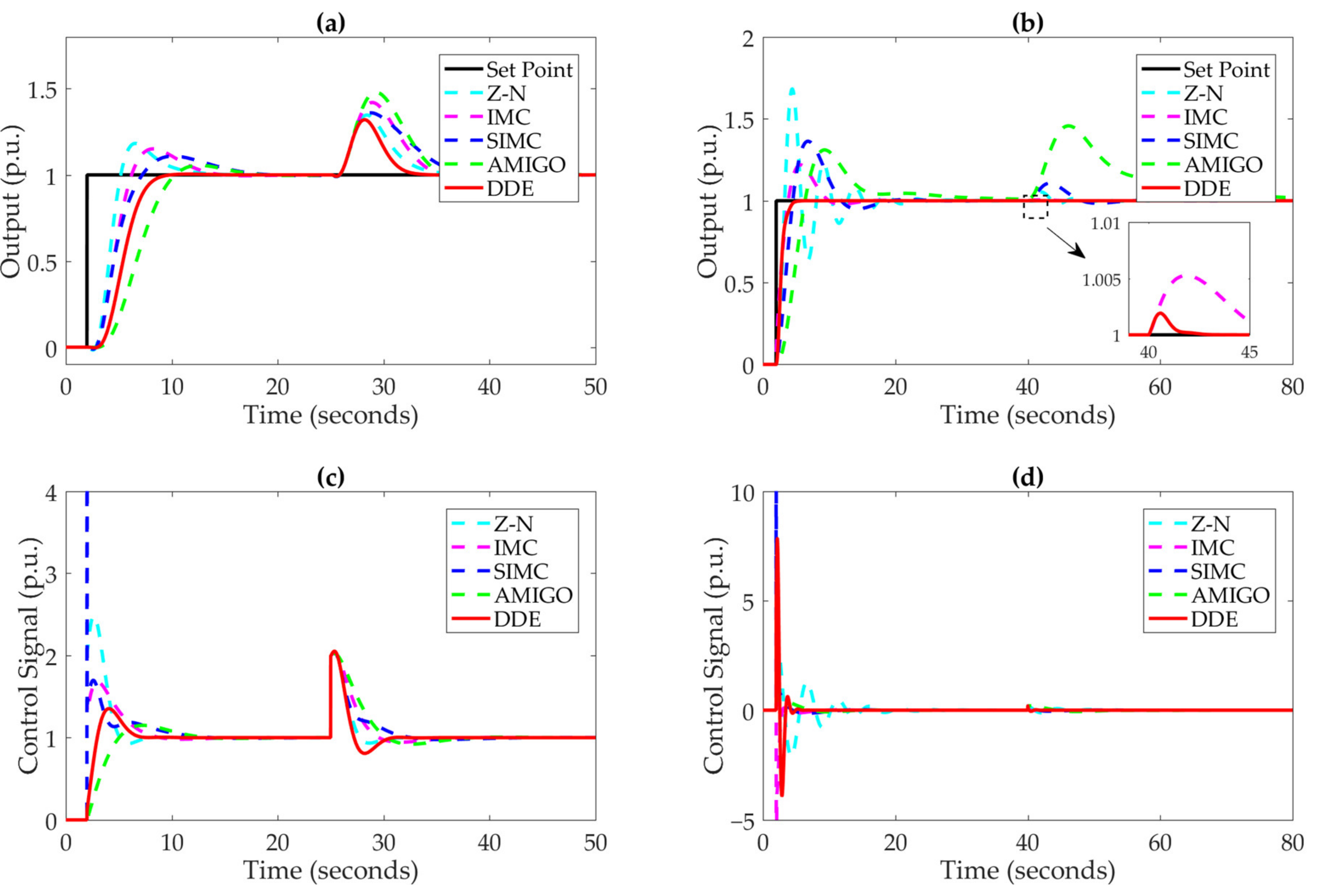
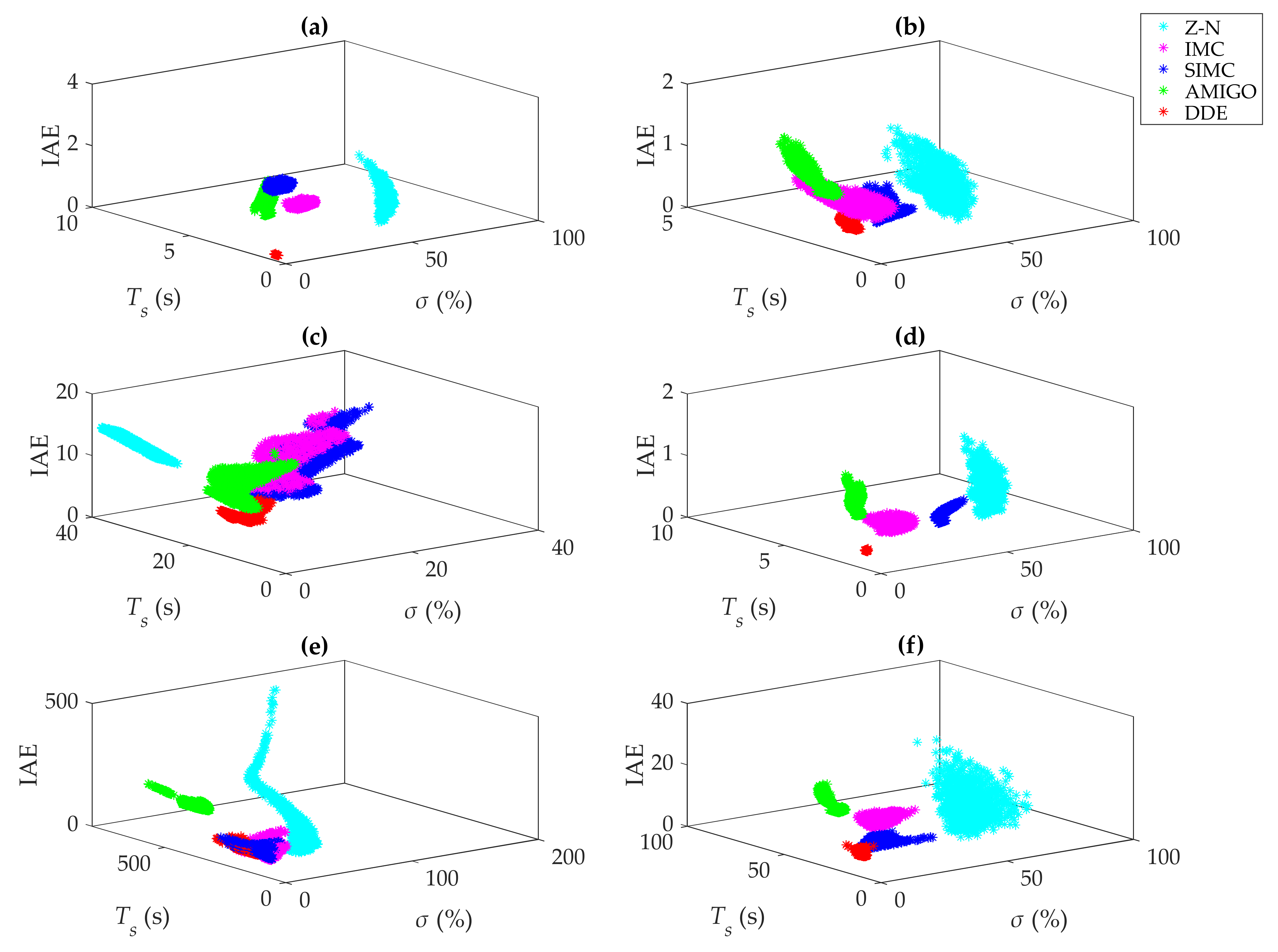
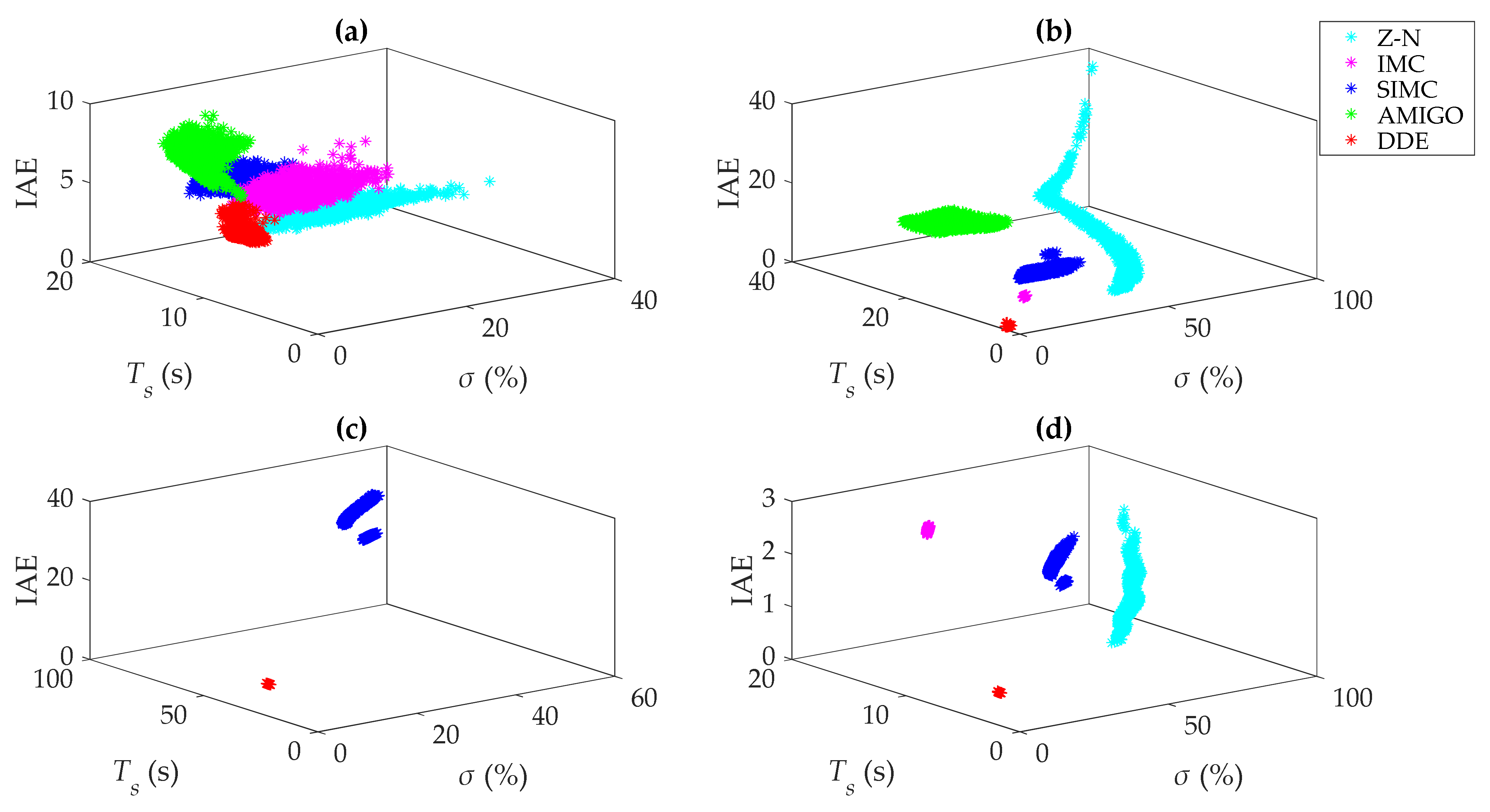
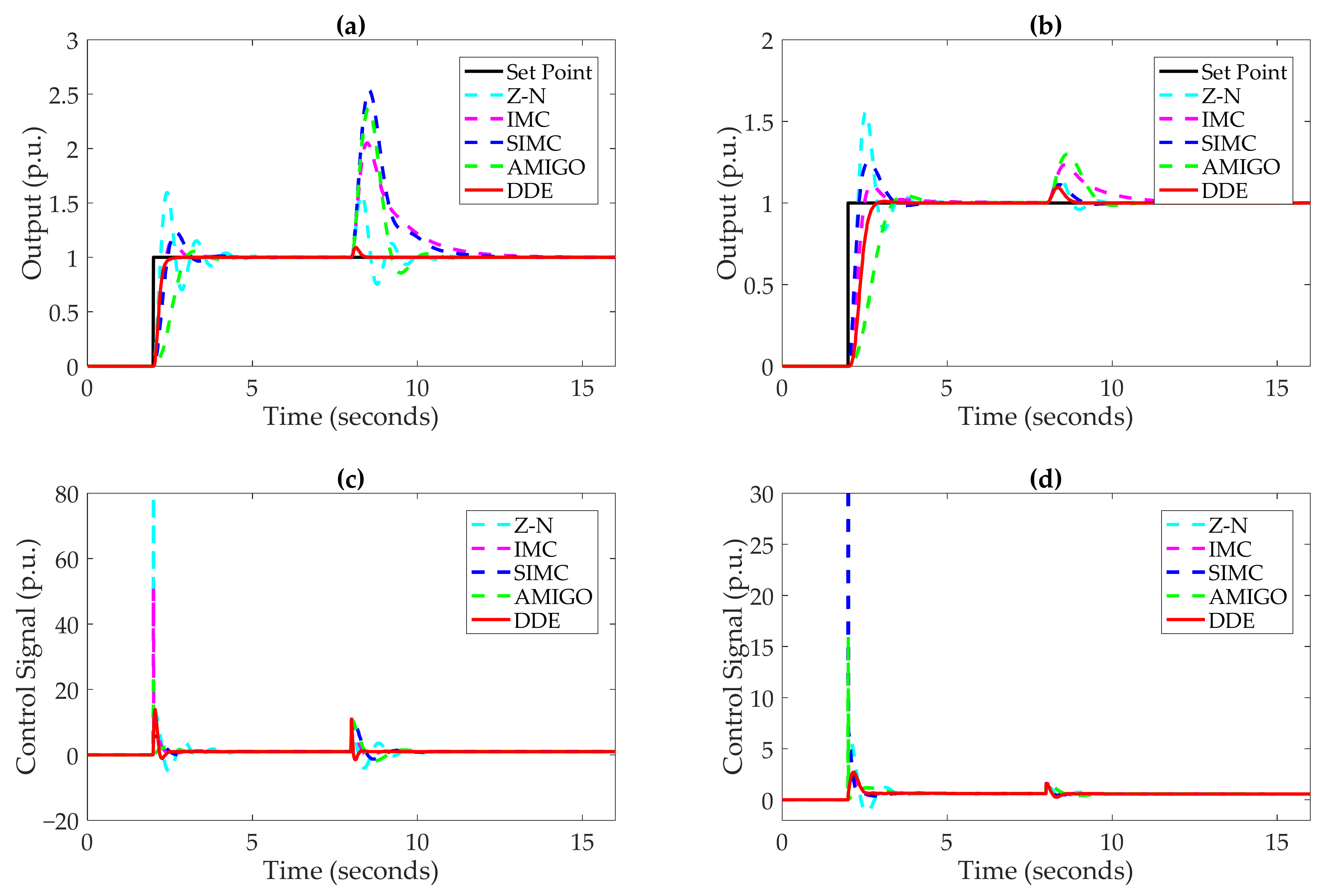
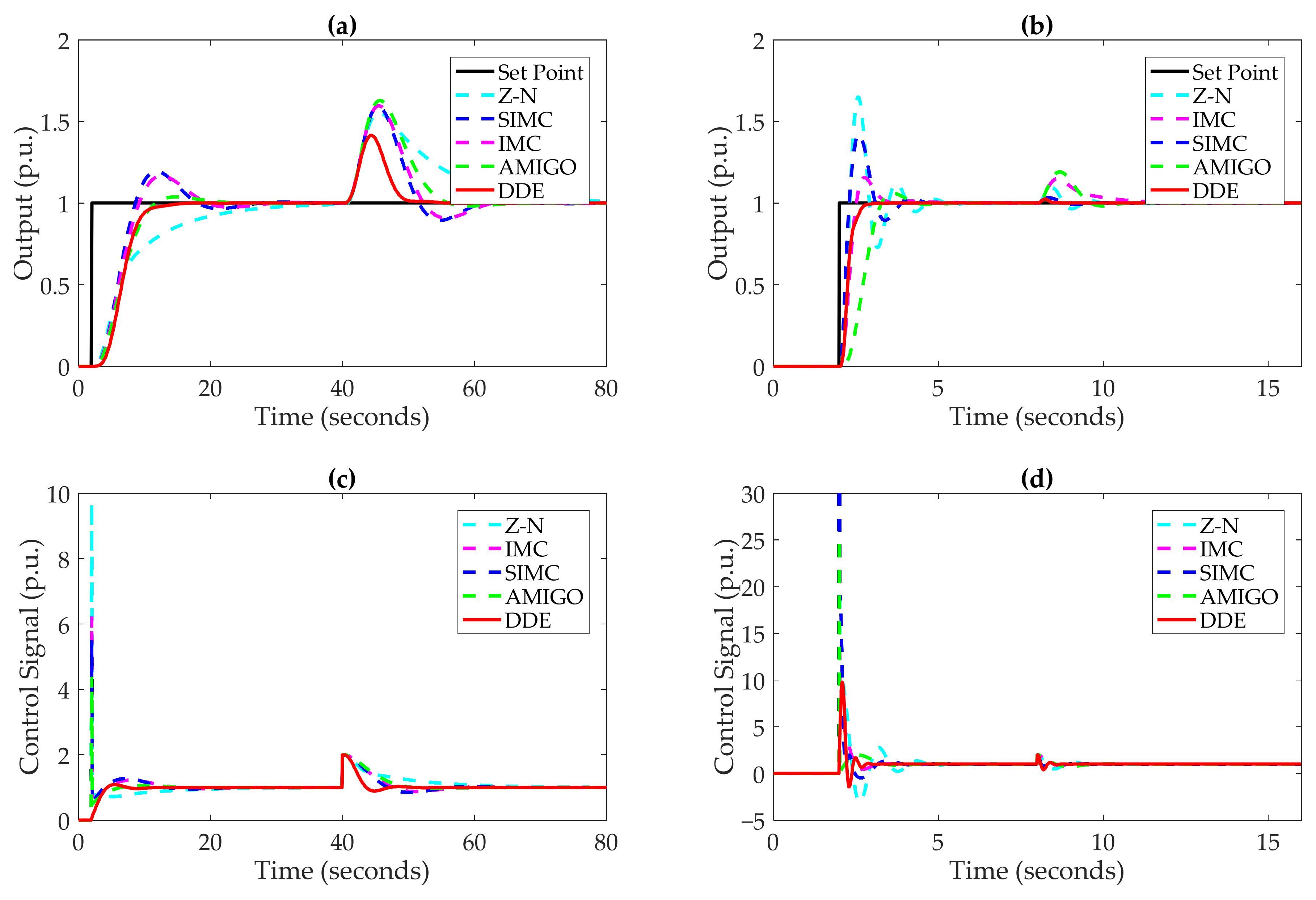
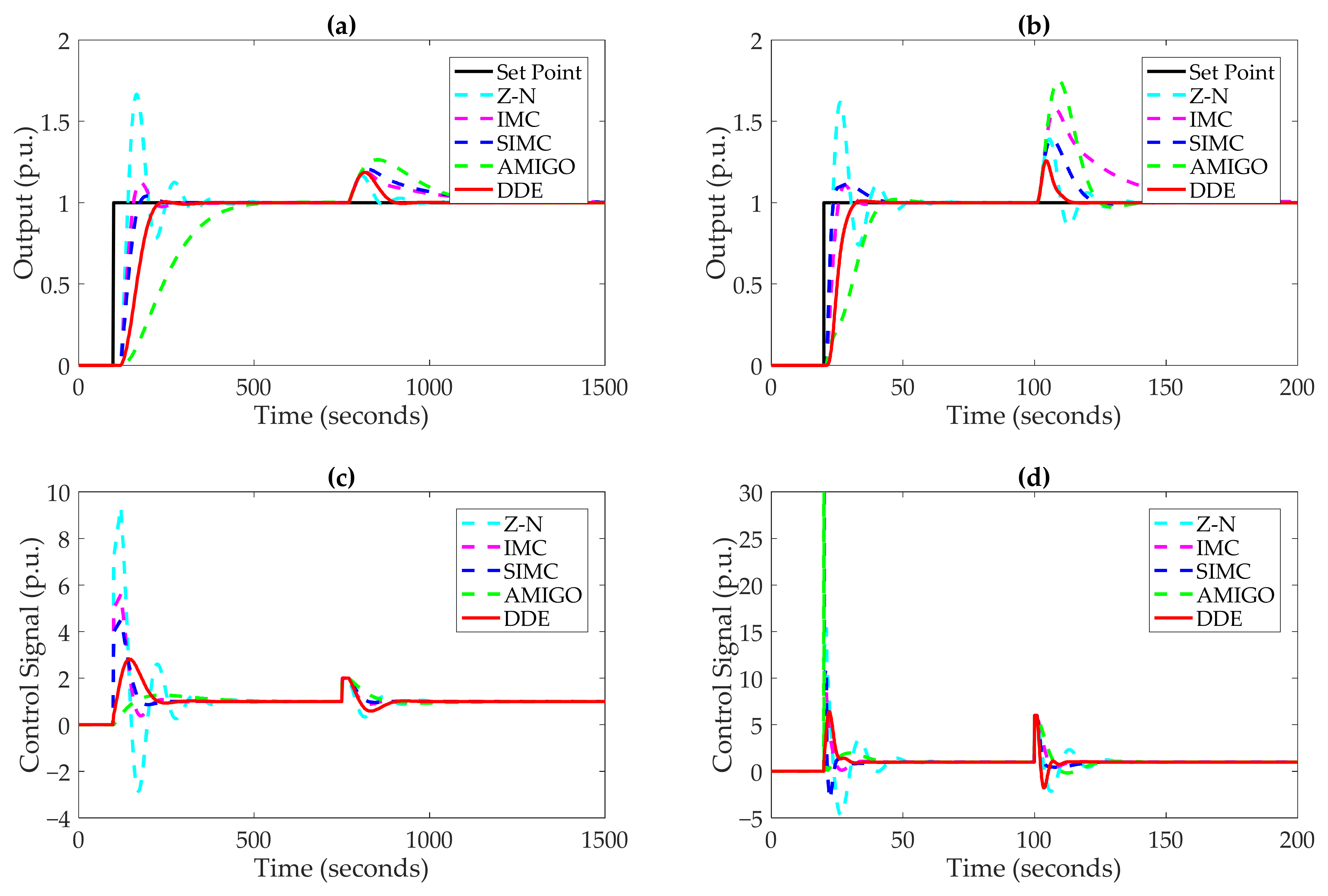
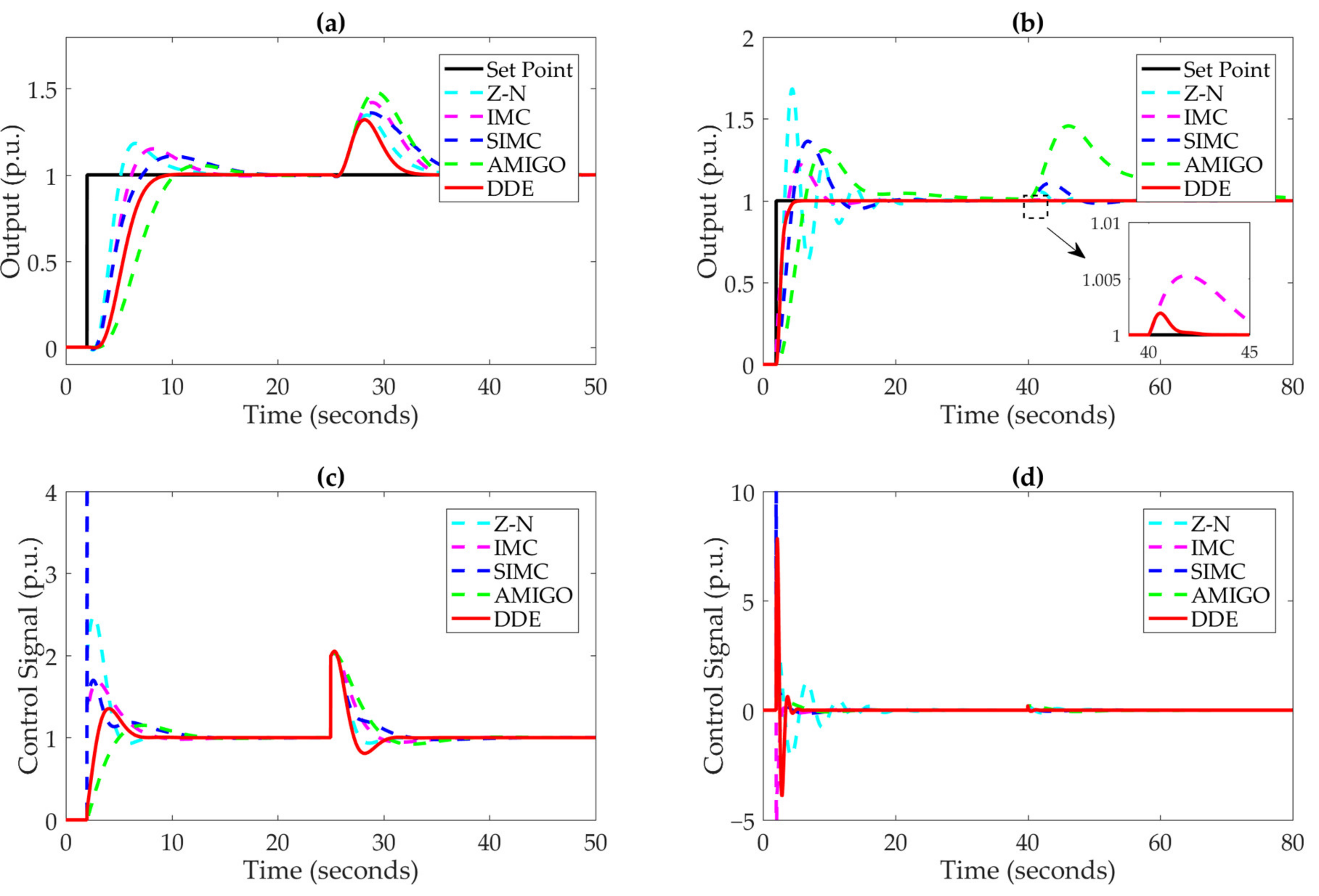
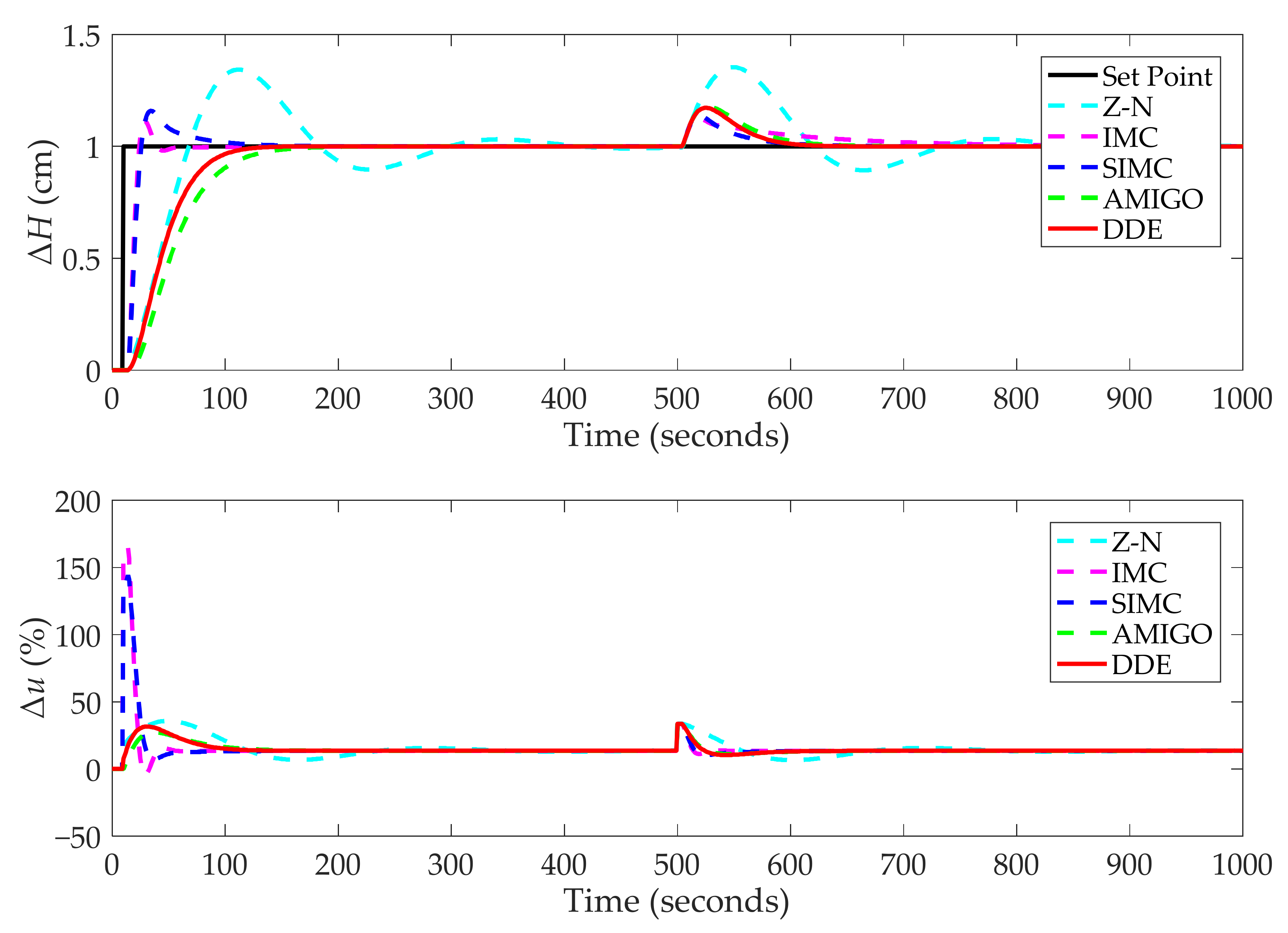
5.2. Comparisons with Practical PID Controllers
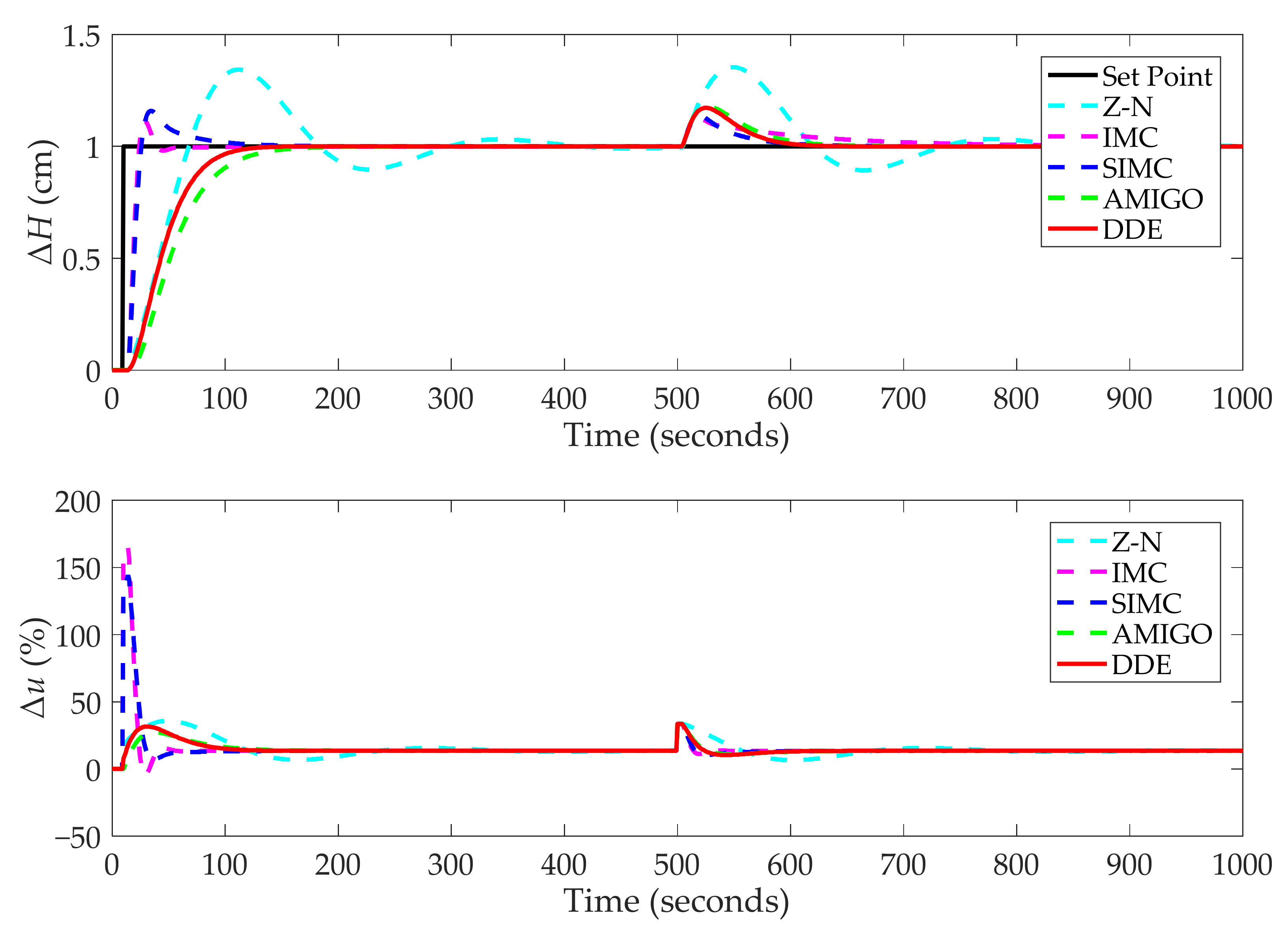
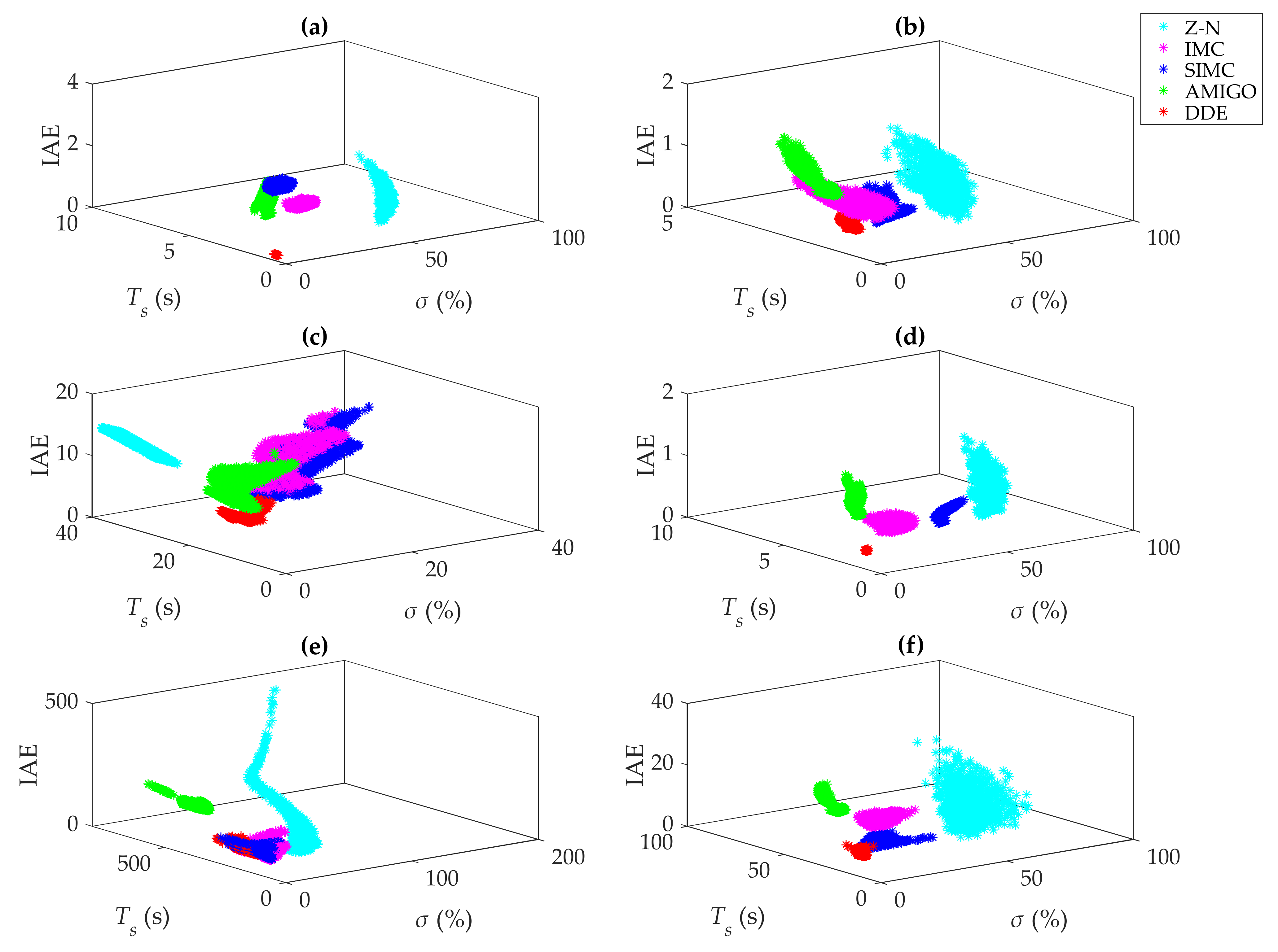
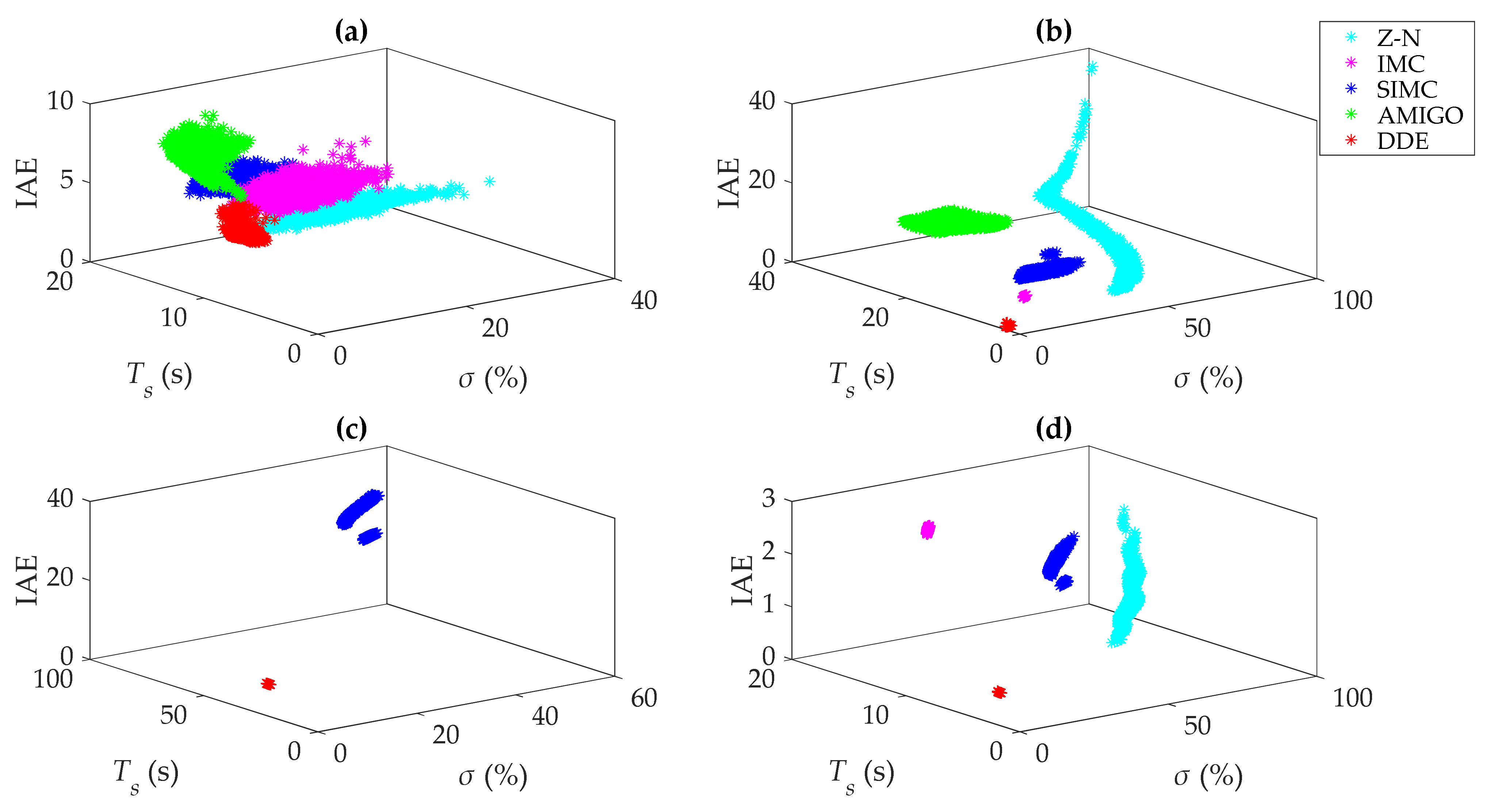
- Compared with other PI and PID controllers, DDE PI and PID have moderate tracking performance and better disturbance rejection performance;
- It is obvious that IMC PI and PID and SIMC PI and PID can obtain fast tracking performance with a small overshoot for Gp5(s) and Gp6(s) because they are proposed based on the nominal FOPDT and SOPDT systems. If the process model is mismatched, their reference tracking may exhibit significant oscillation;
- The control performance of AMIGO PI and PID is conservative.
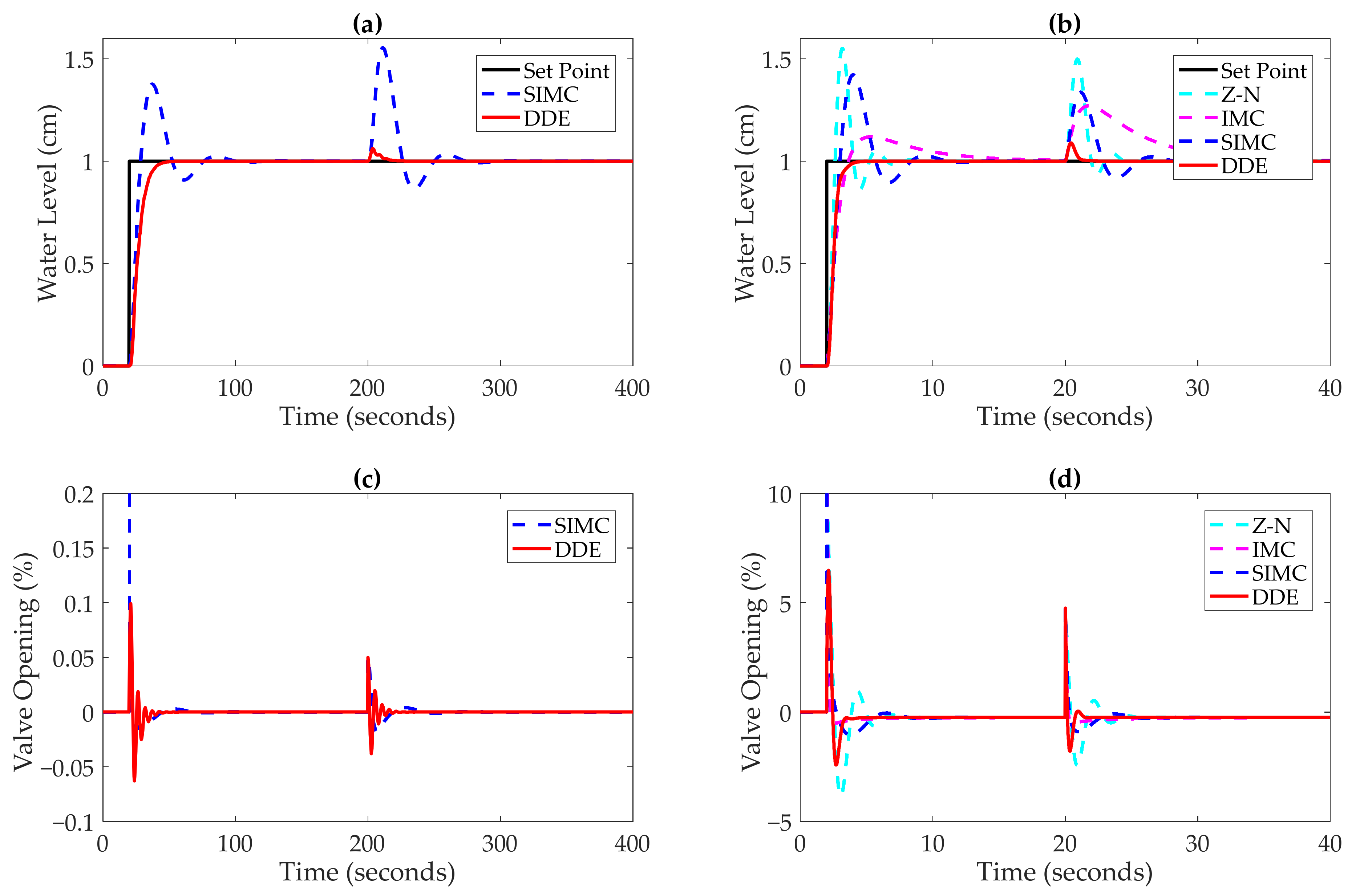
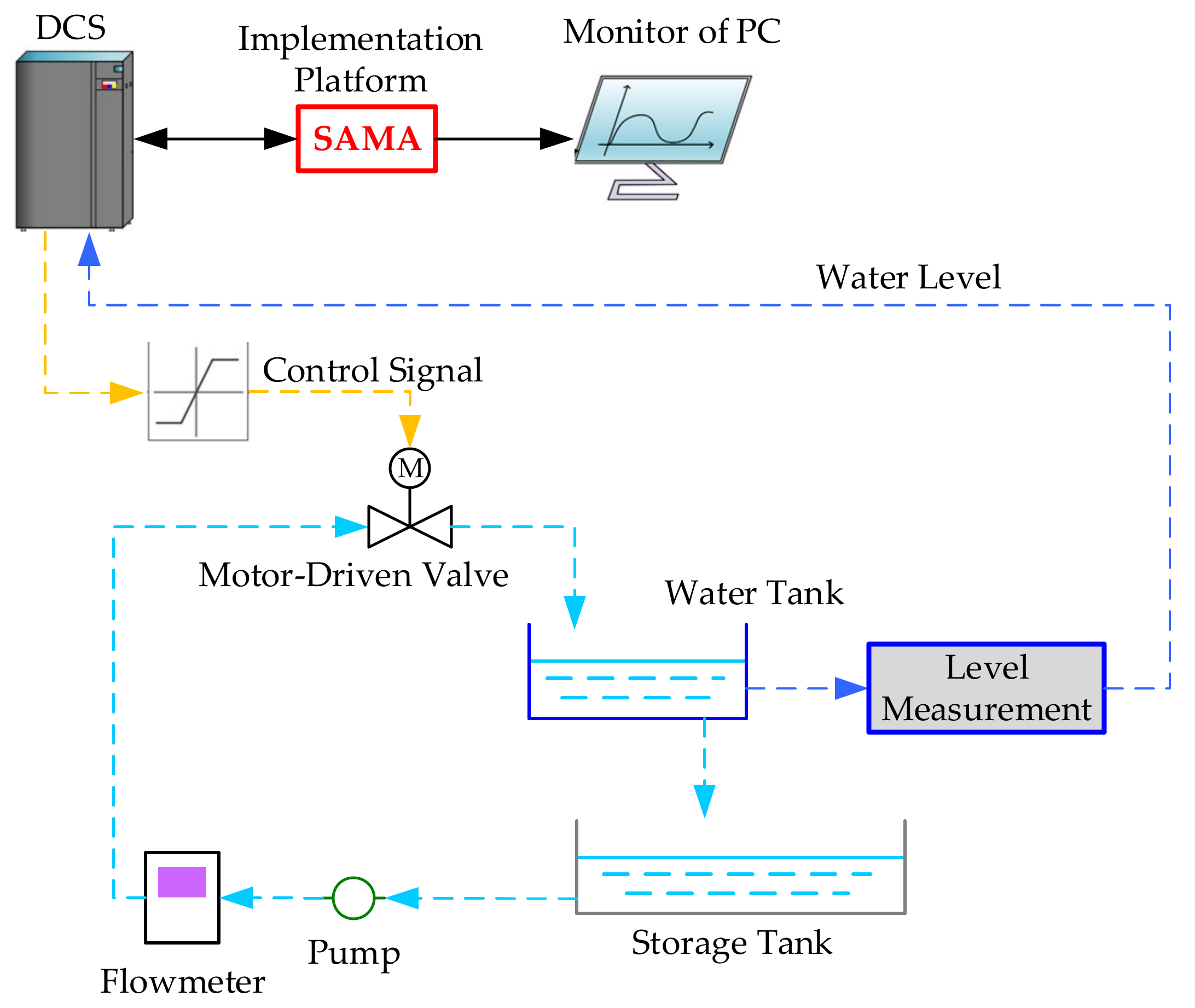
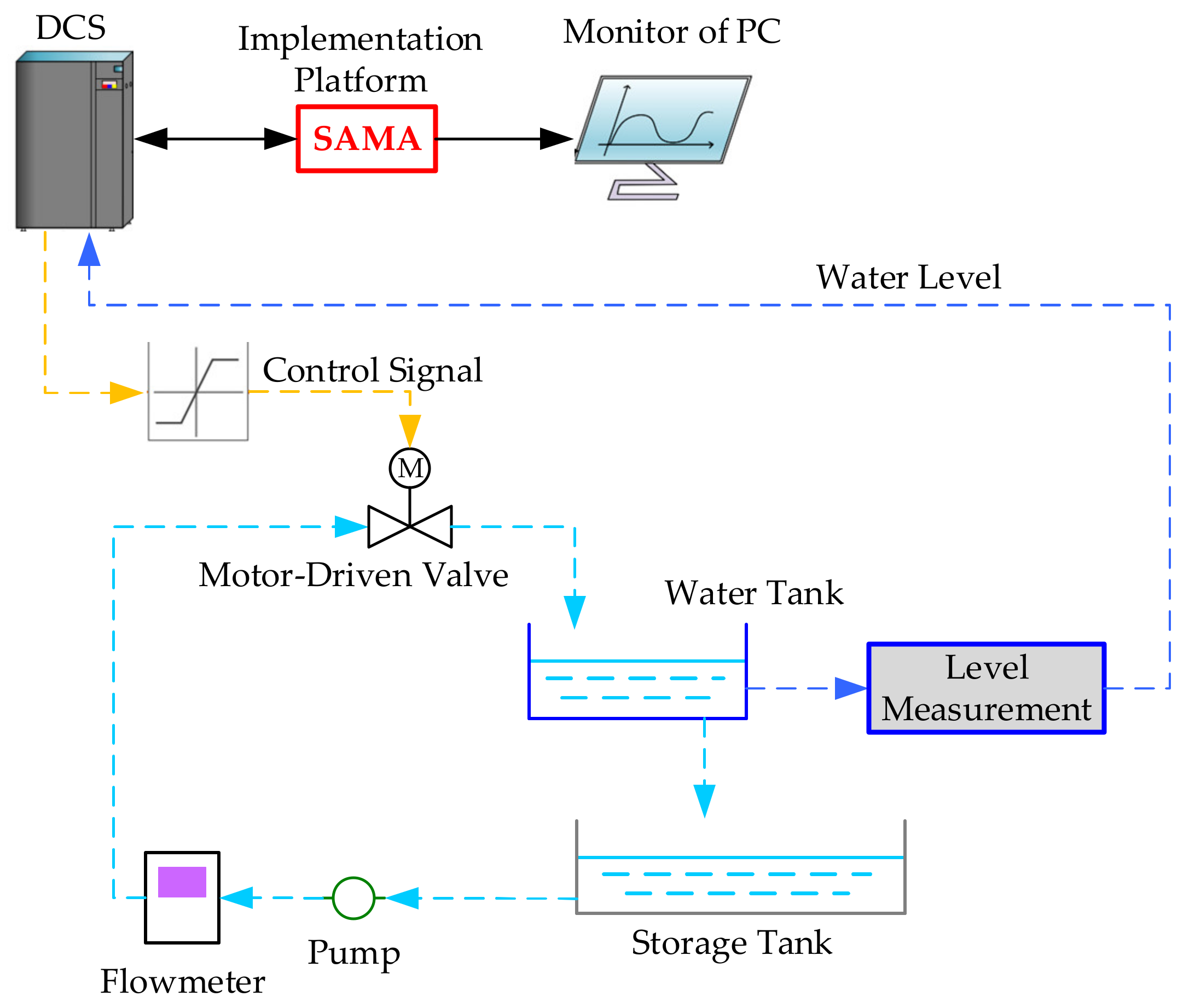
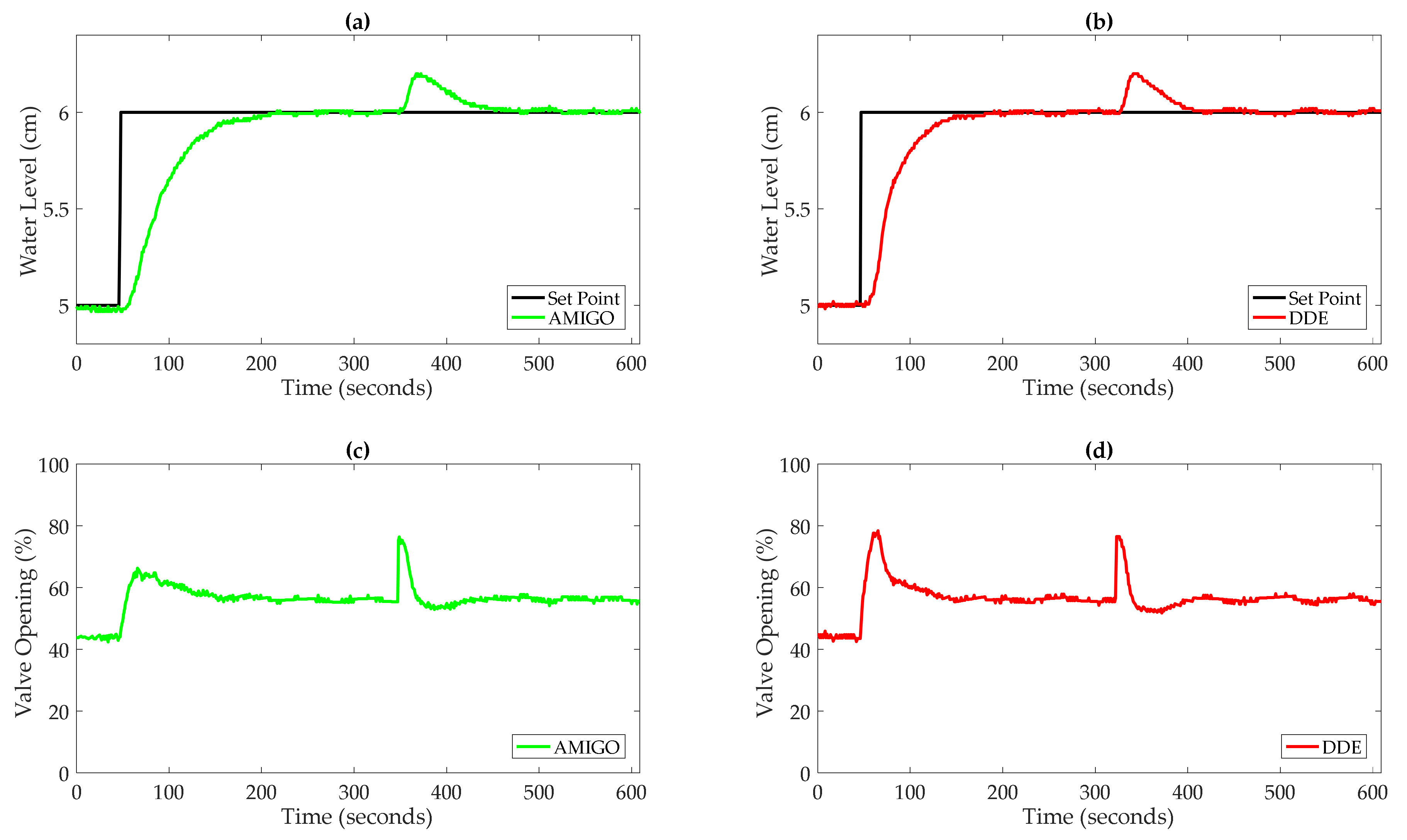
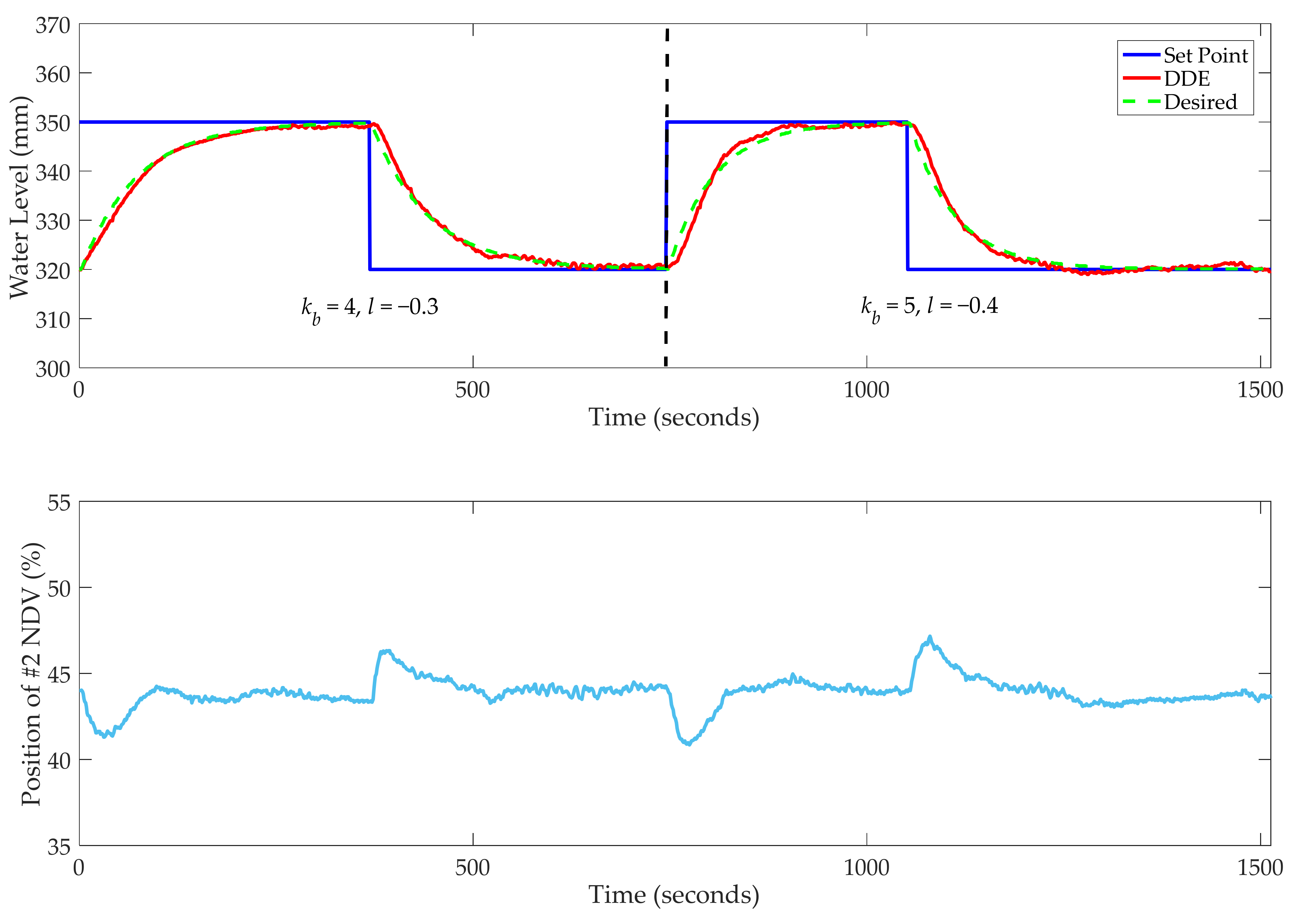
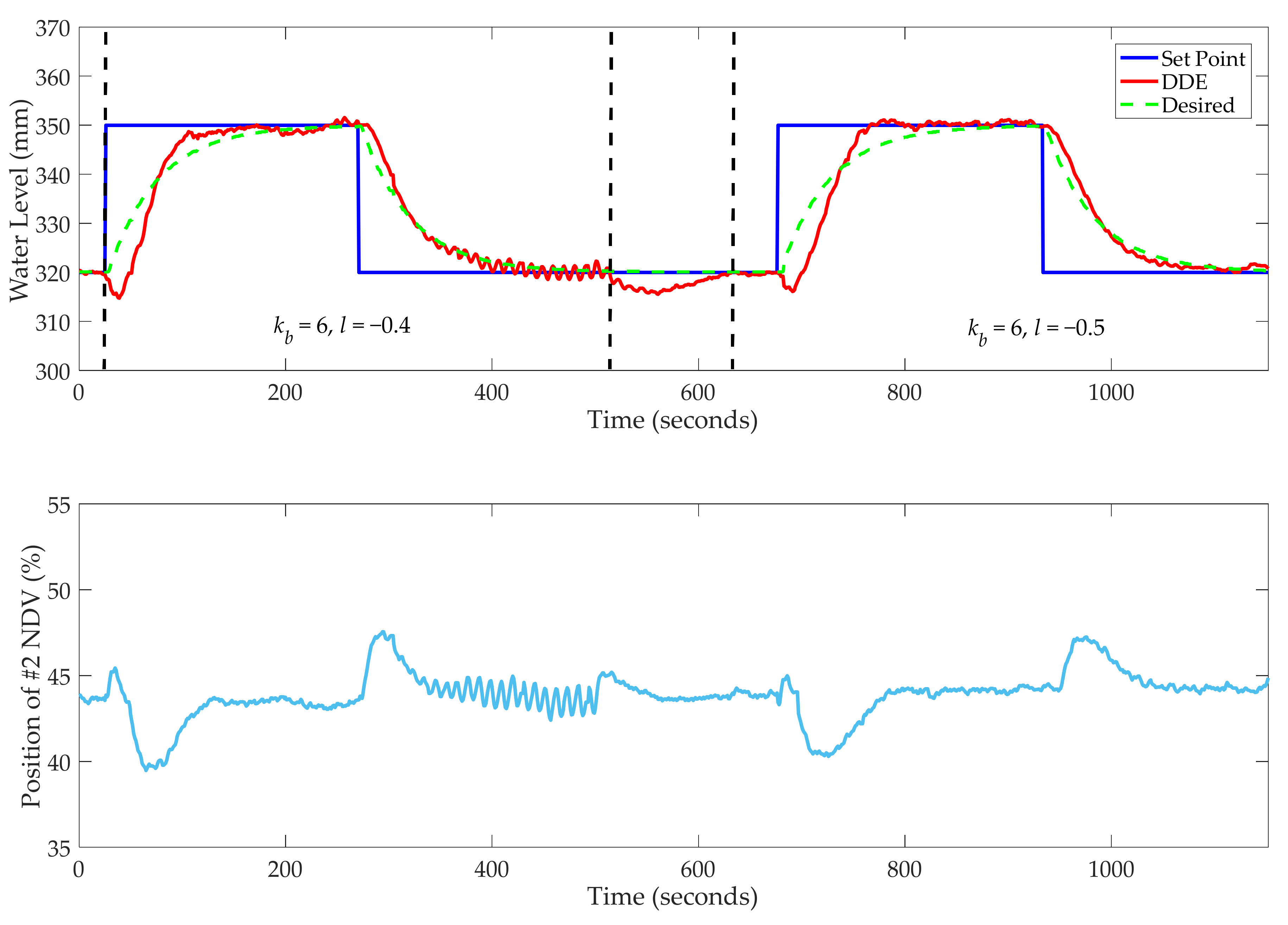
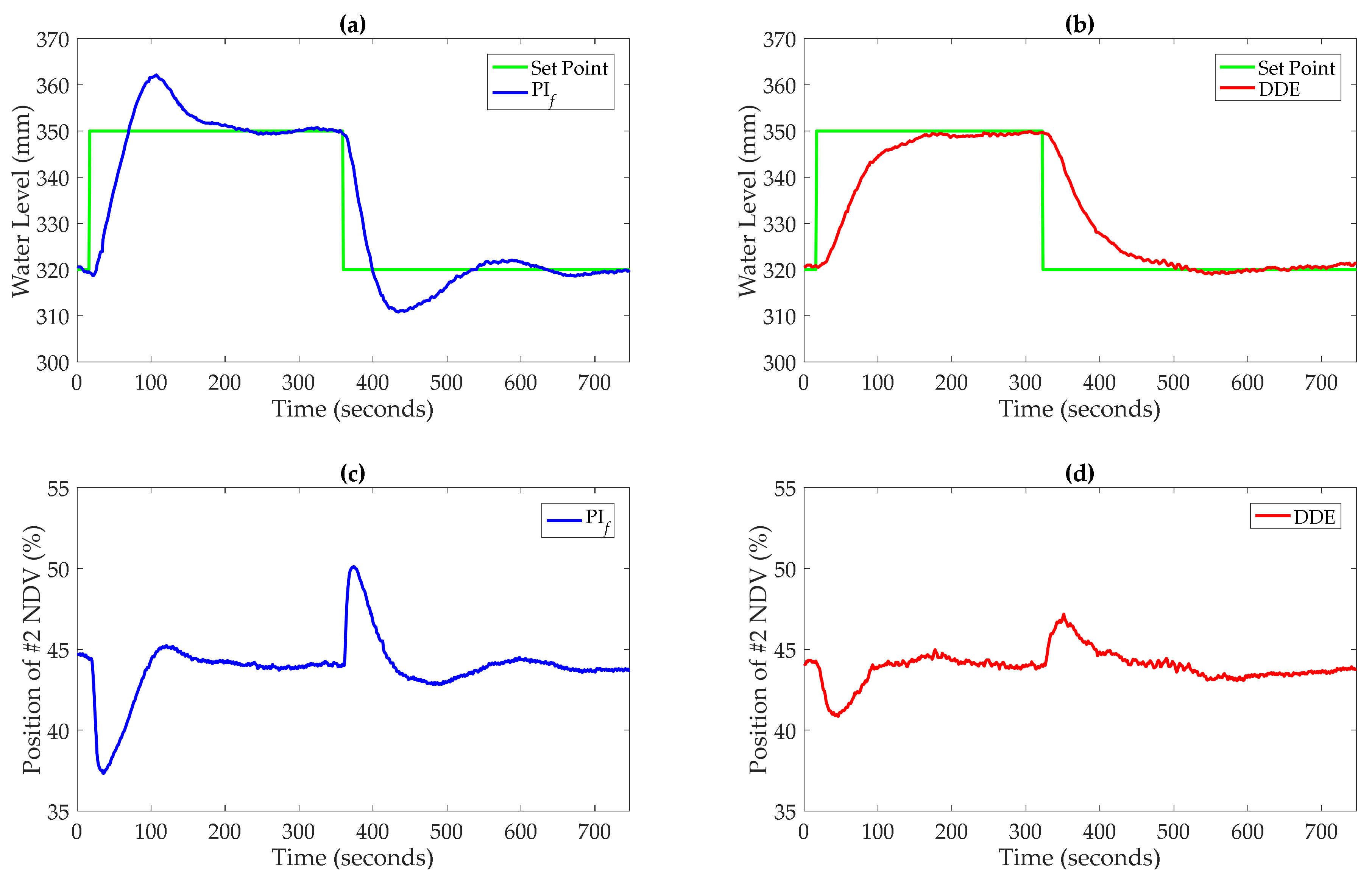
6. Experimental Verification with a Water Tank
6.1. Experimental Set-Up and Process Description
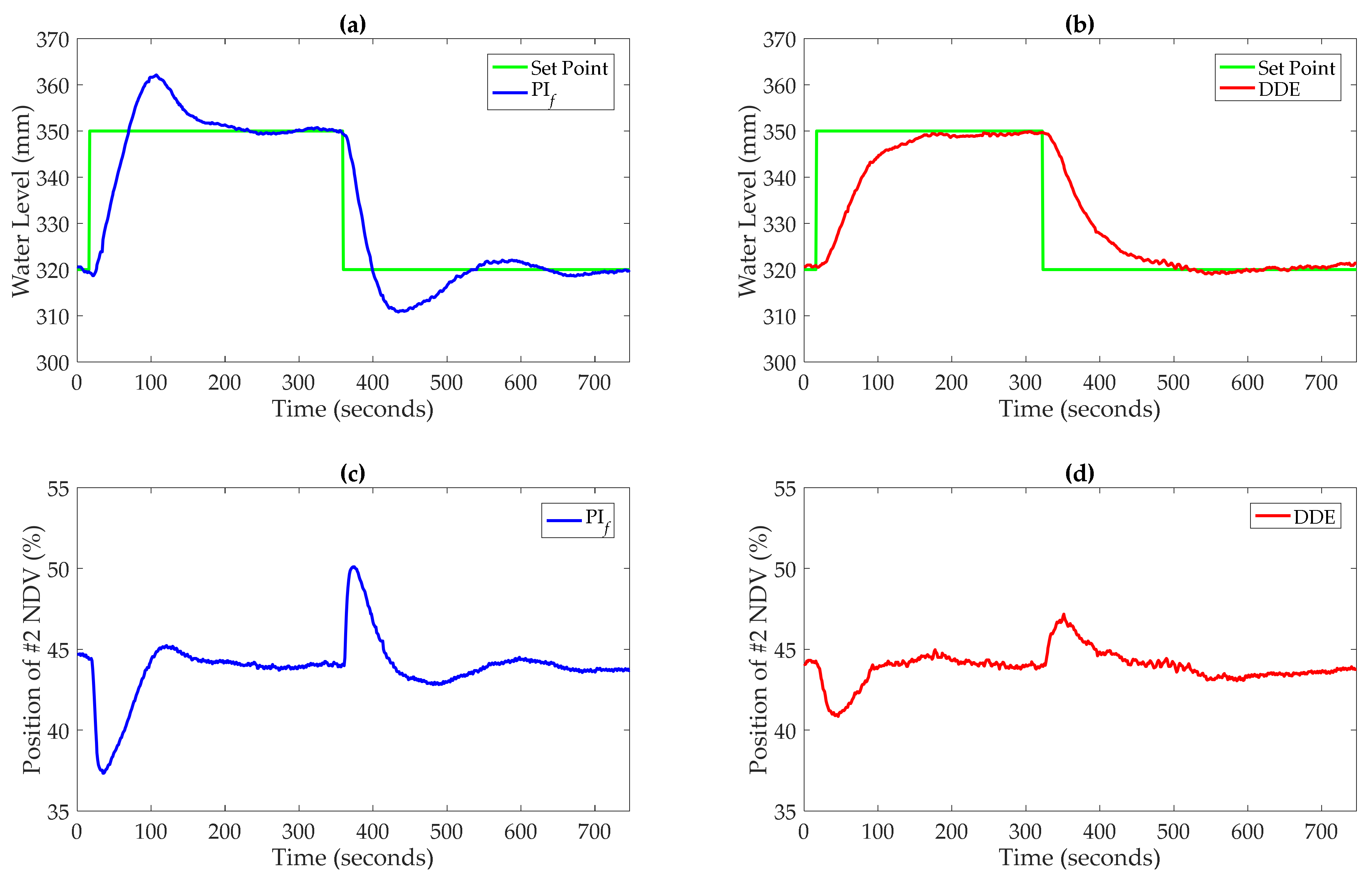
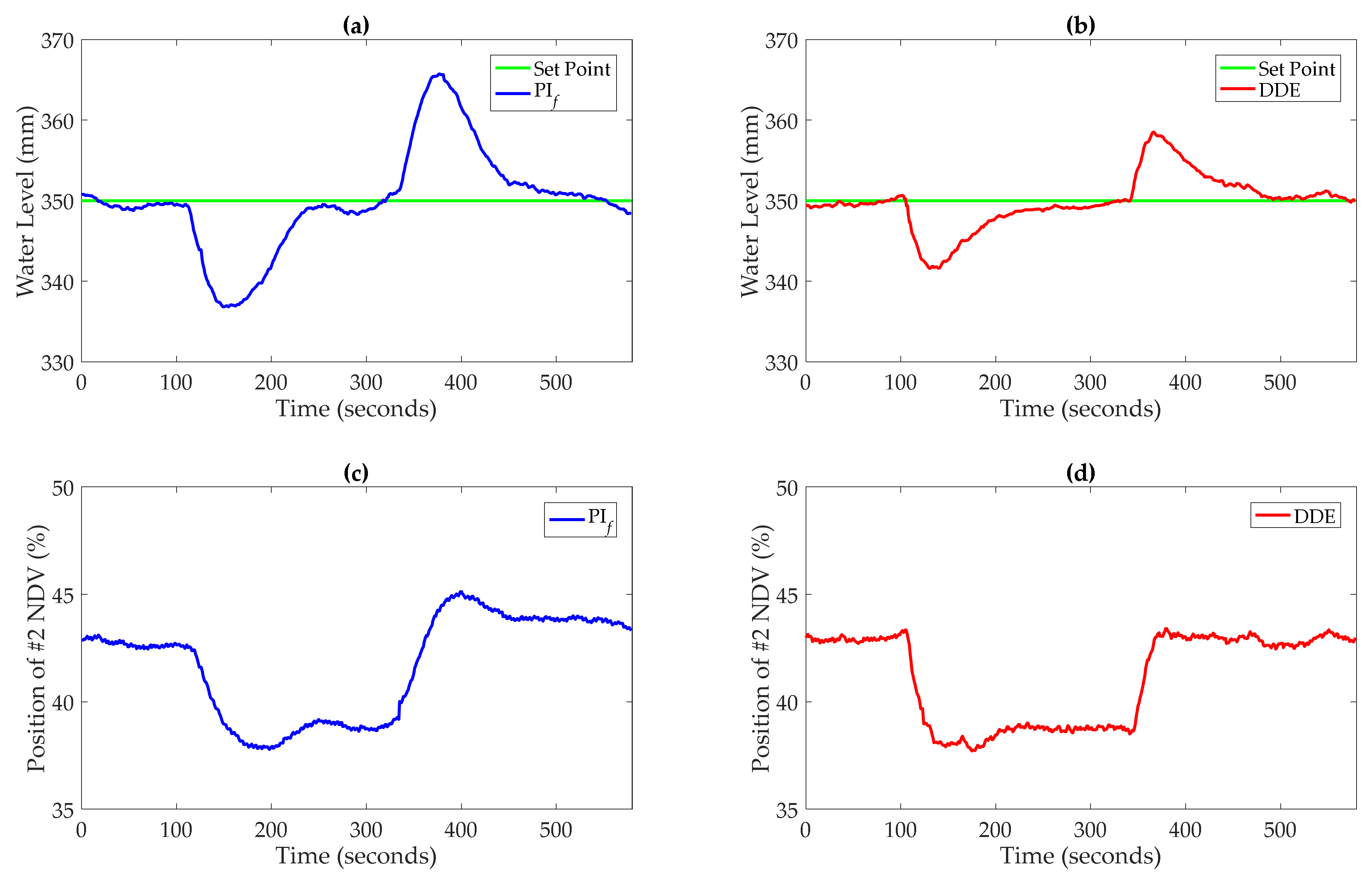
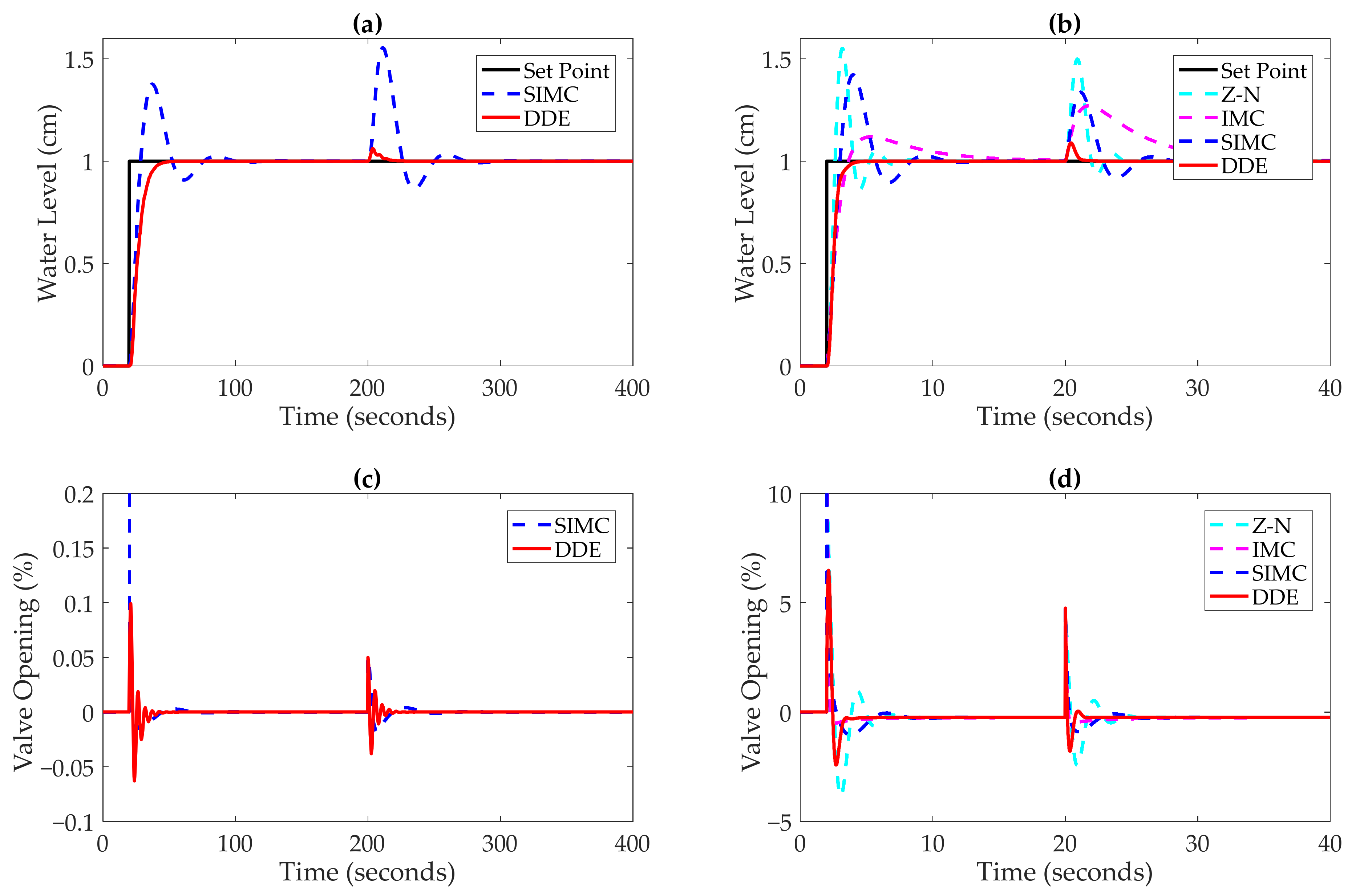
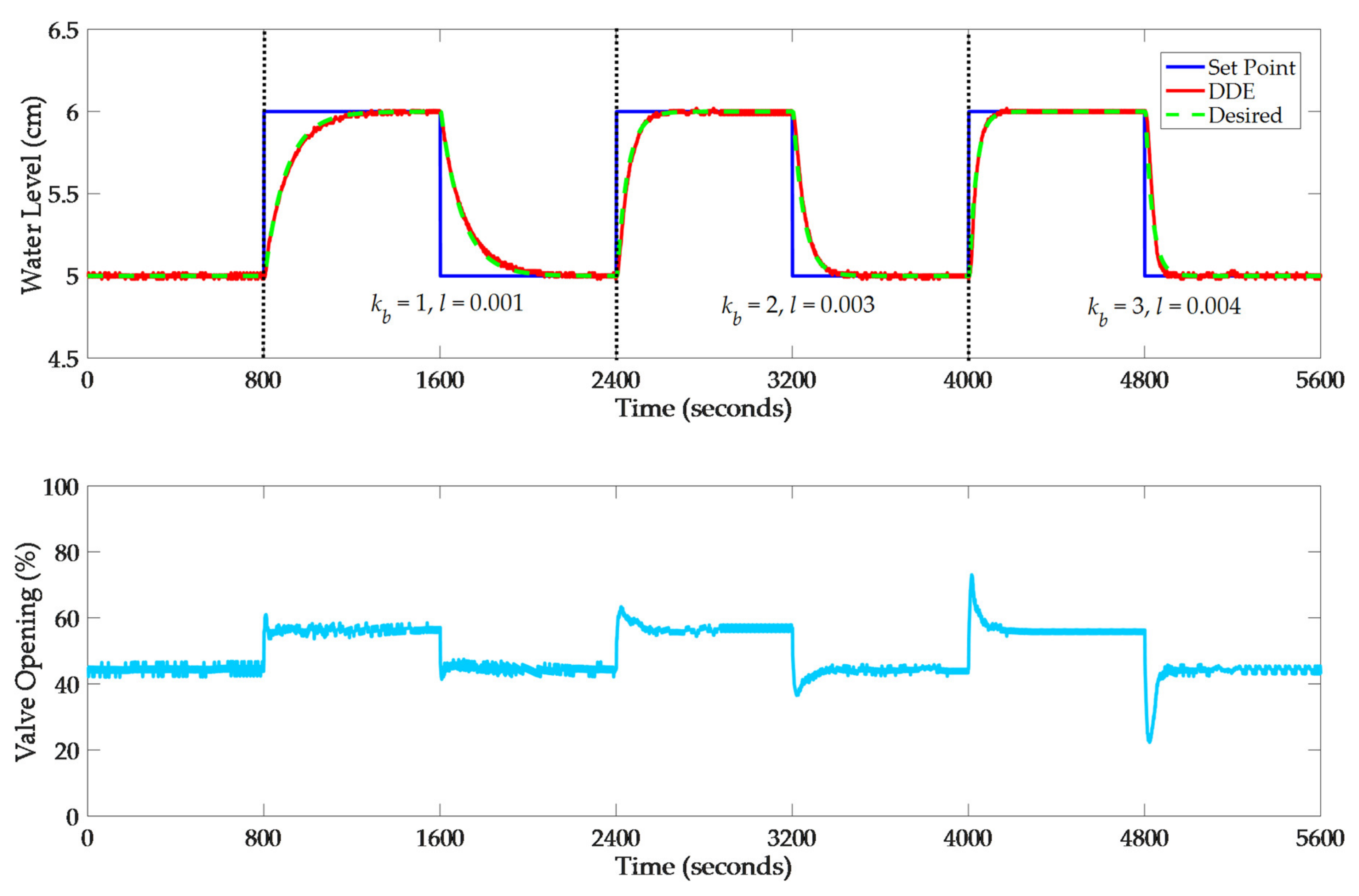
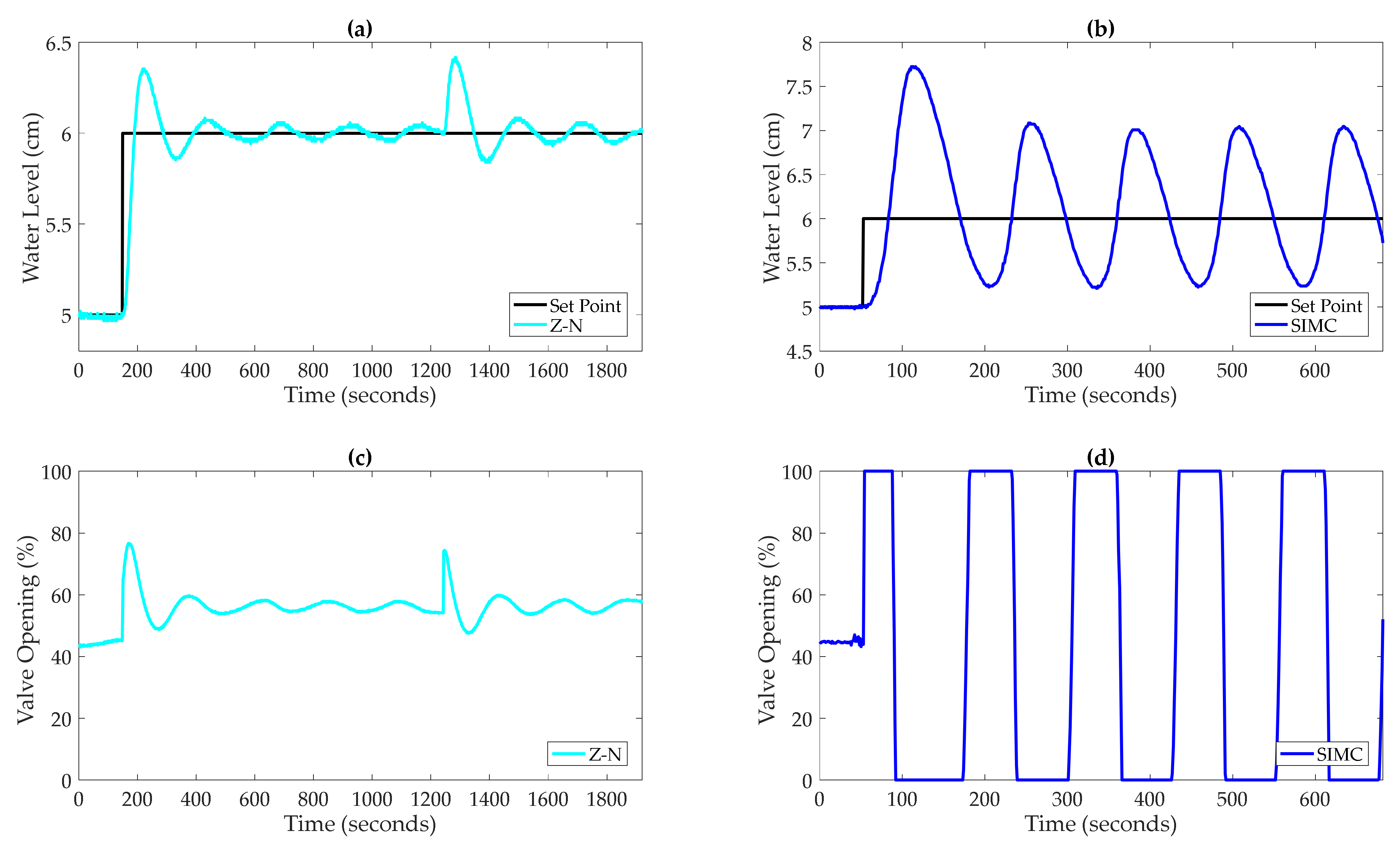
6.2. Results and Discussions
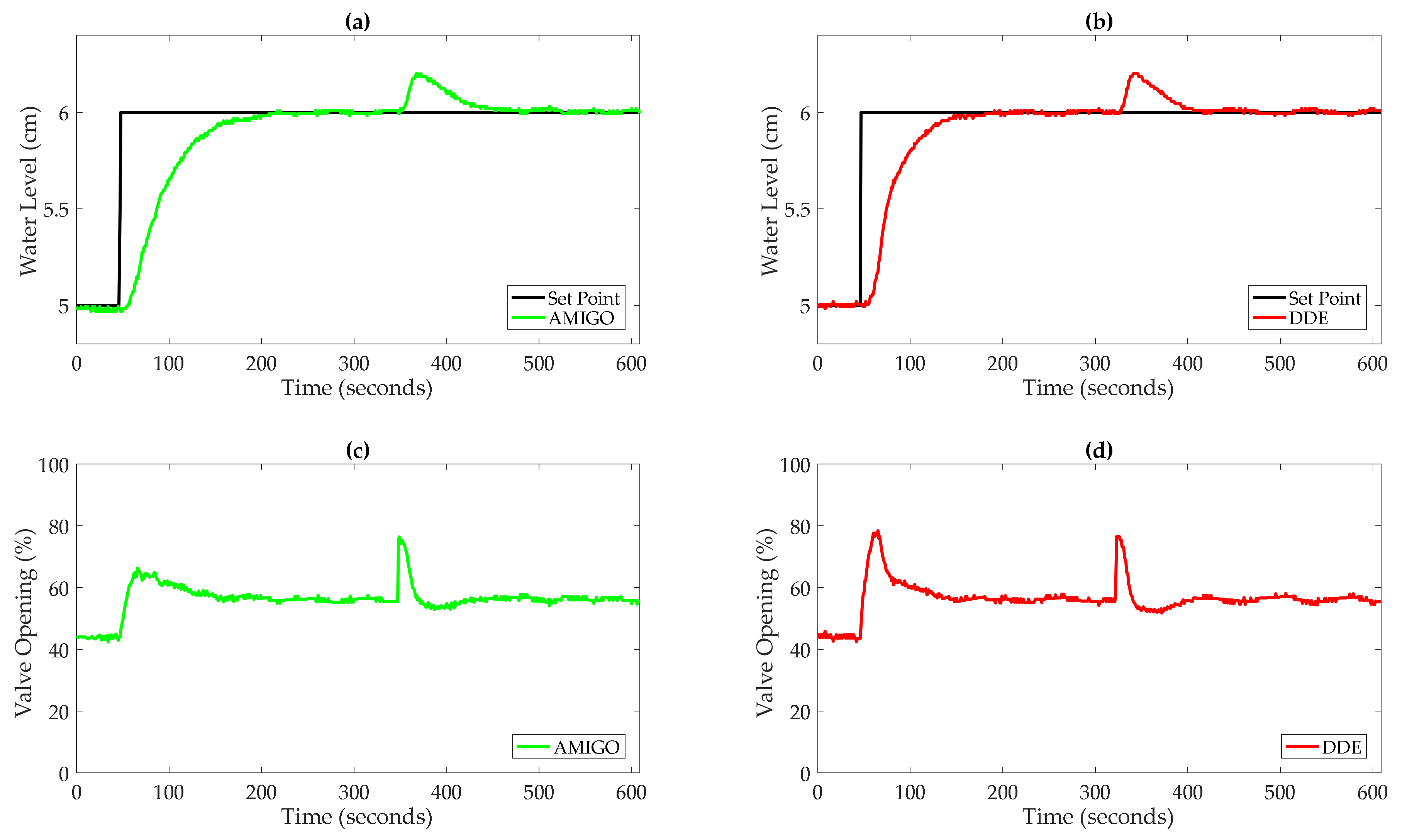
- Compared with AMIGO PI, DDE PI had faster reference tracking performance;
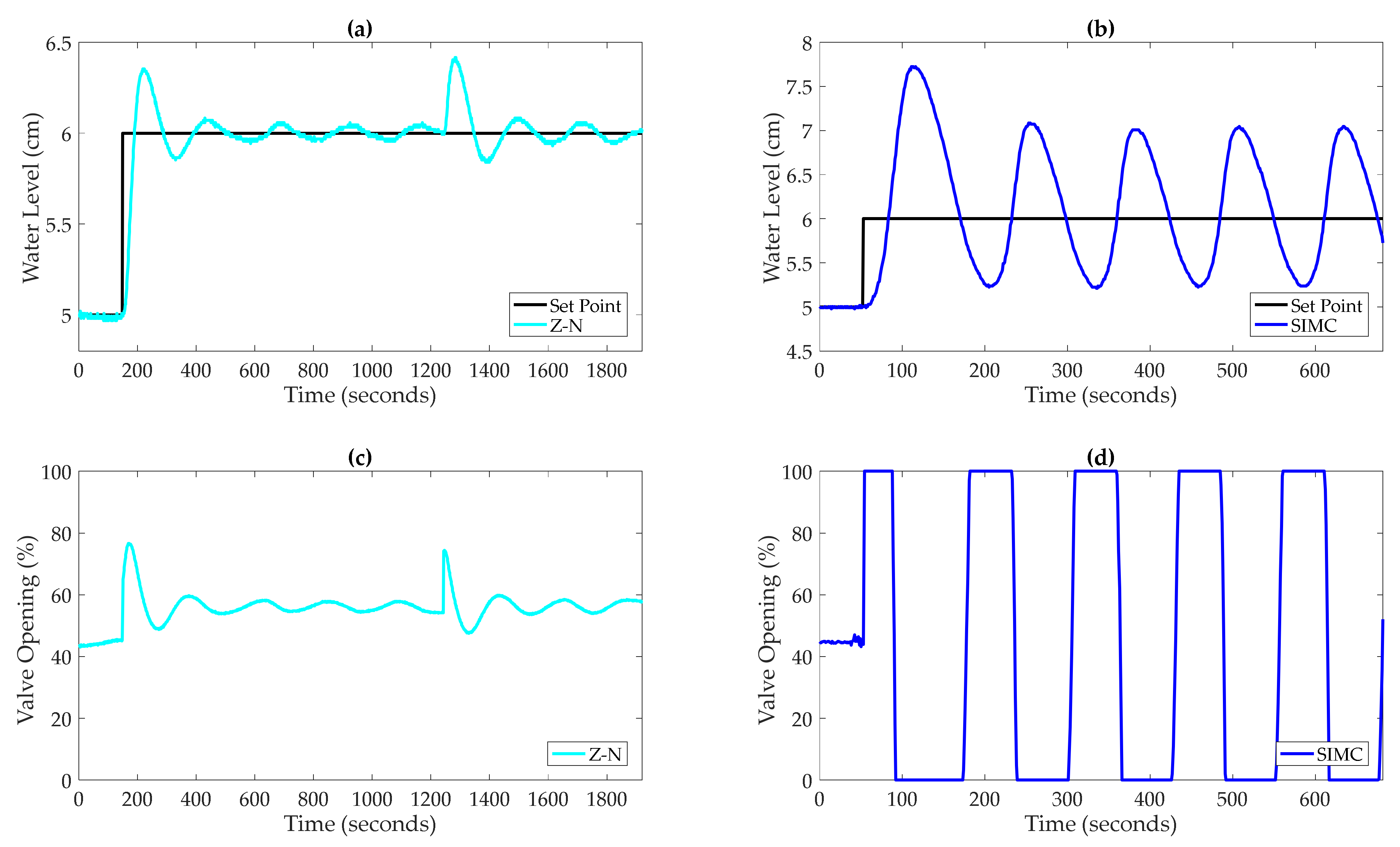
- Using the Z-N method, the water level may oscillate severely if the set point has a step change;
- As expected, the application of SIMC PI would lead to actuator saturations, and the water level was unable to be stable.
- From Table 6, IMC PI had stronger controller parameters than SIMC PI, which means that its variation in the valve opening was larger than that of SIMC PI. As a result, it was not applied to the level control of the water tank to protect the actuator.
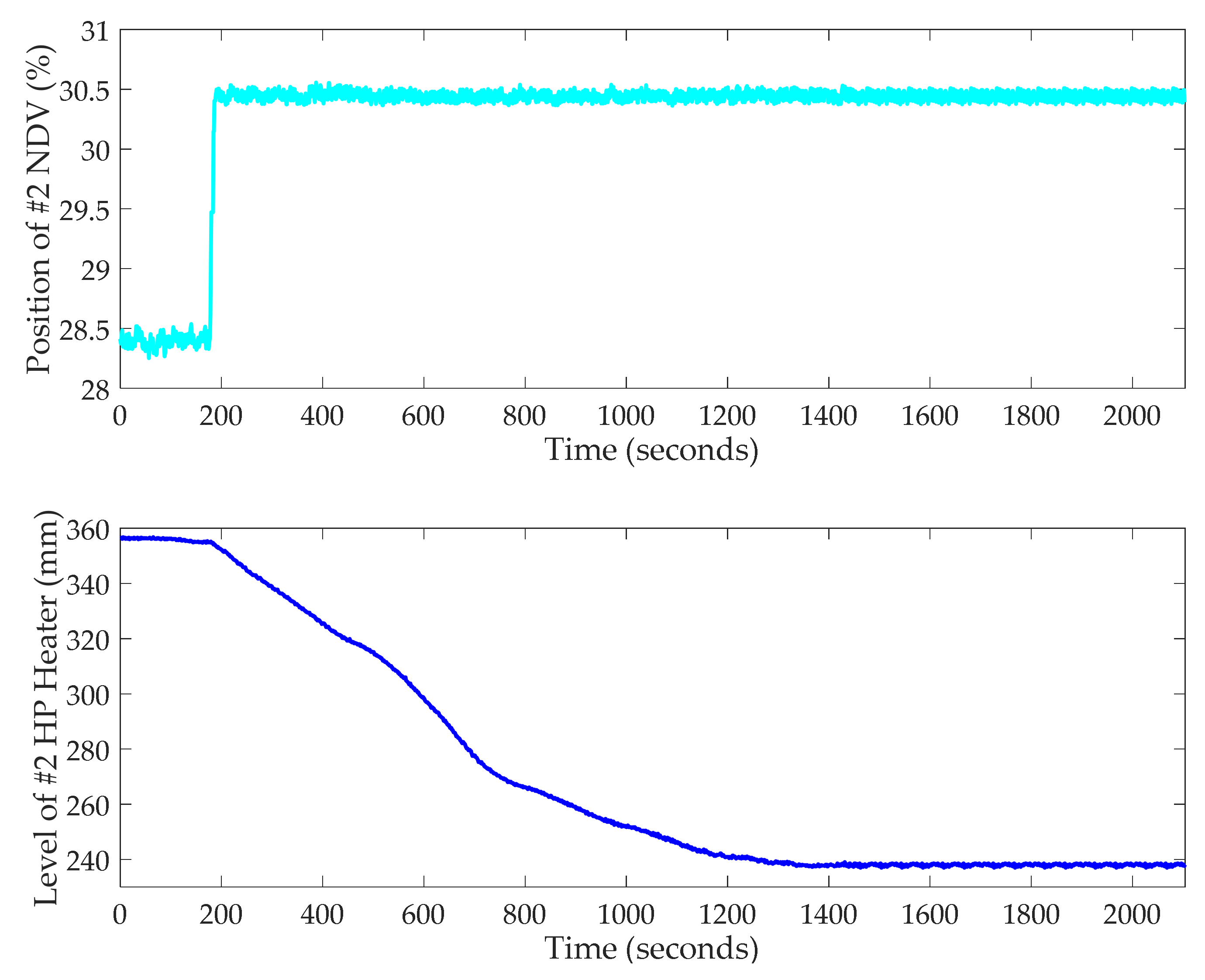
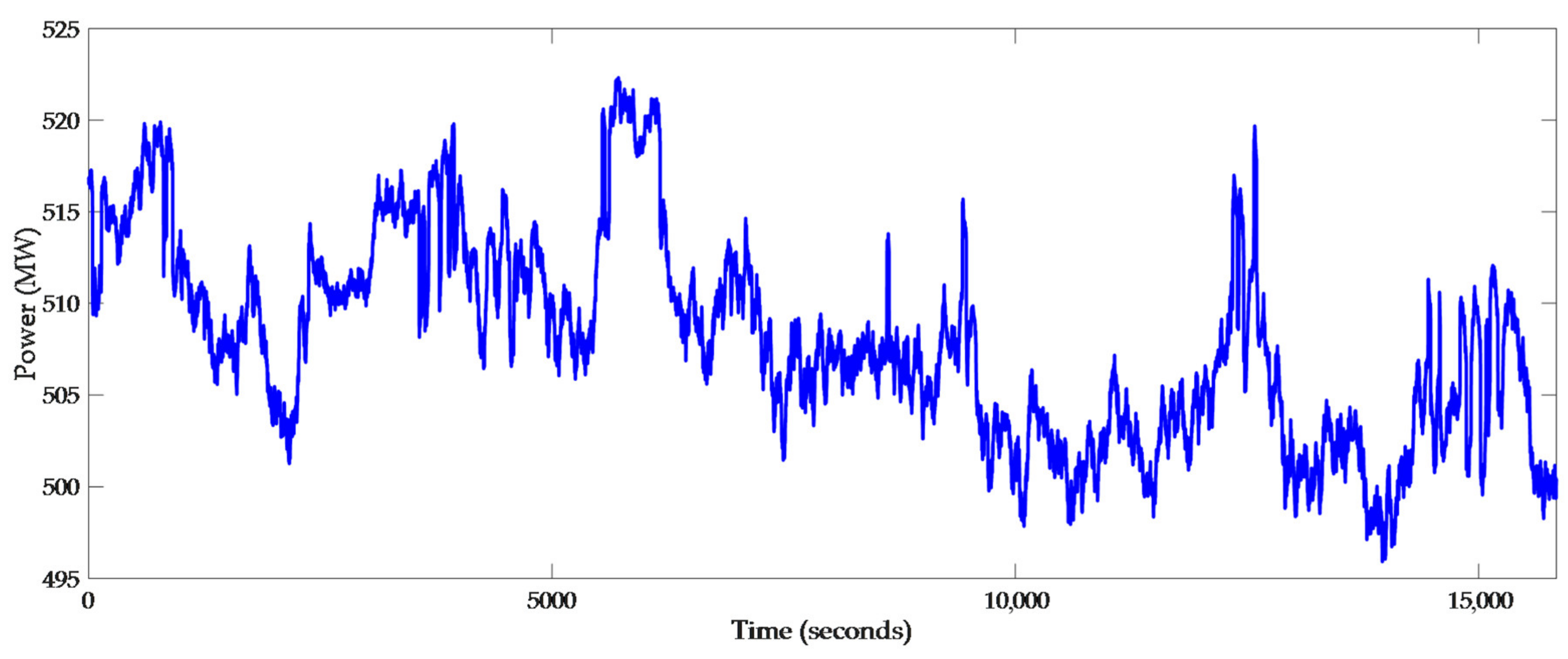
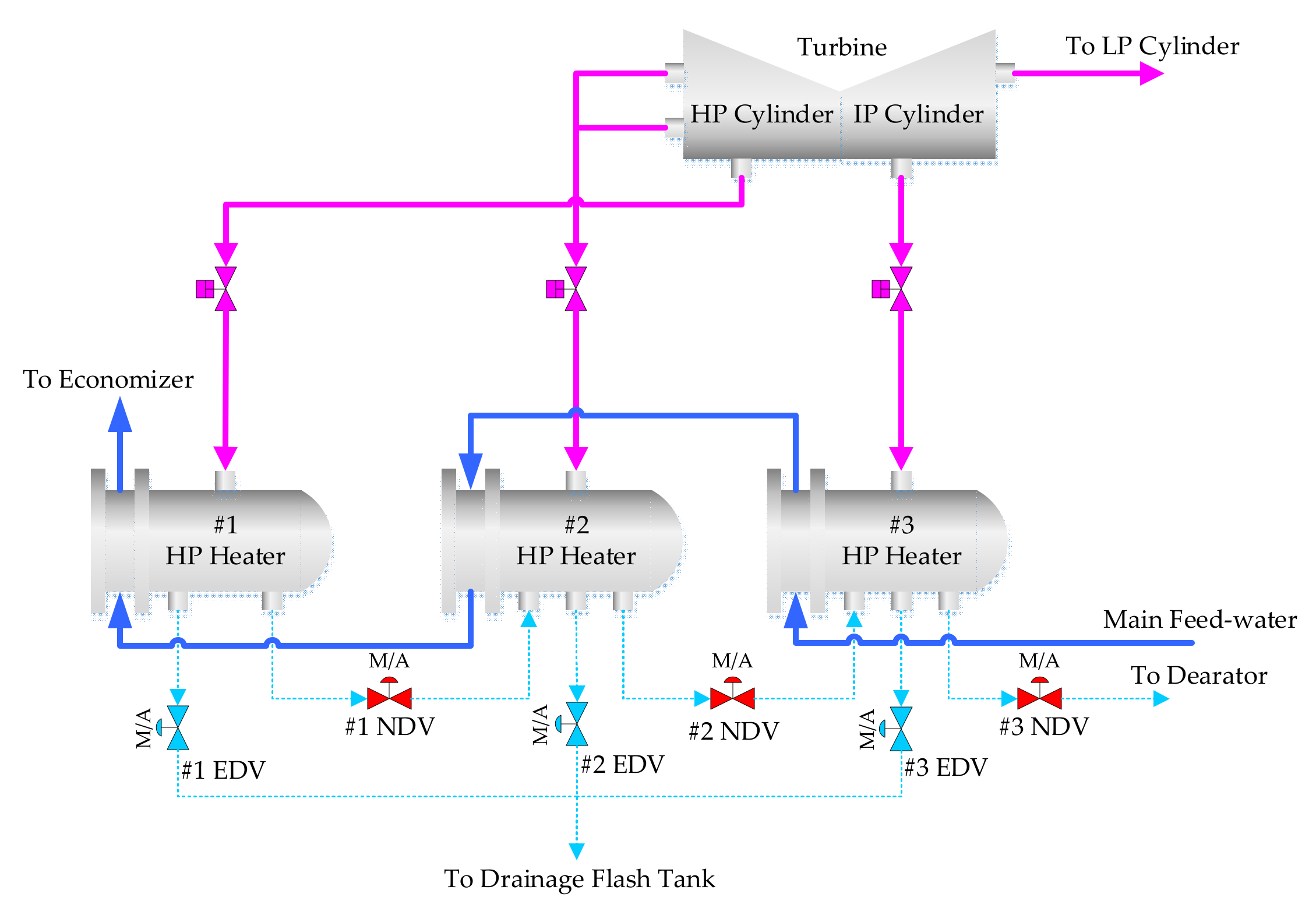
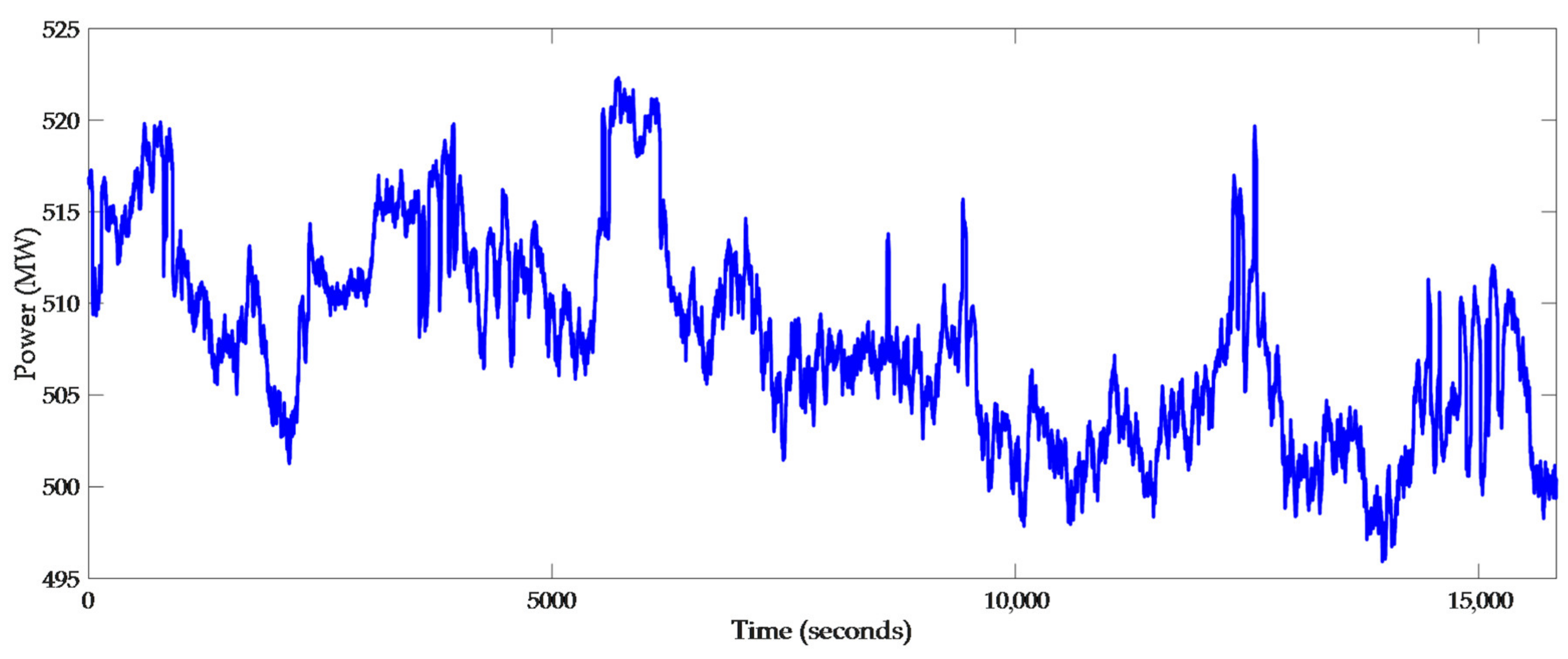
7. Field Test on an HP Heater of a 600-MW Coal-Fired Power Plant
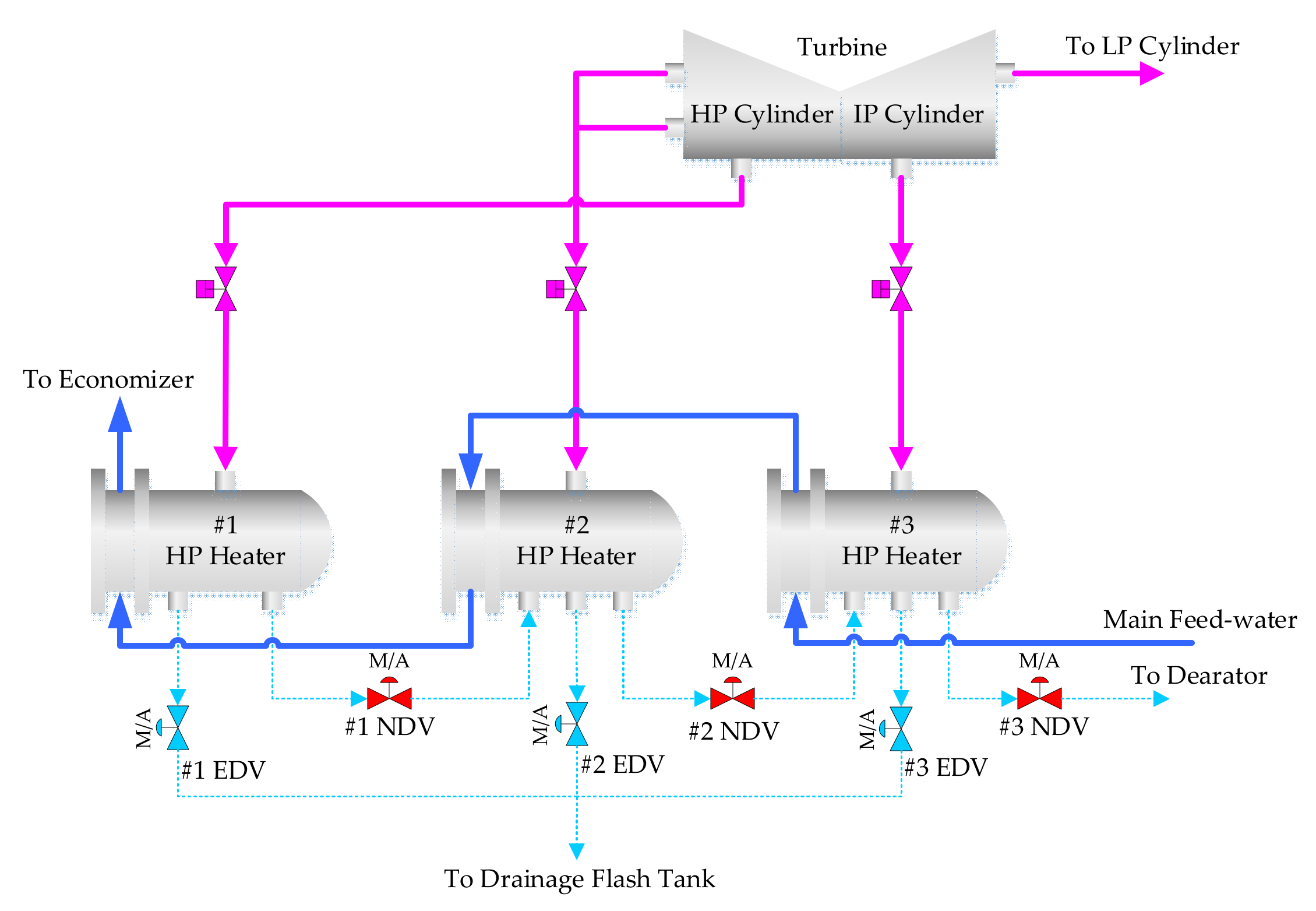
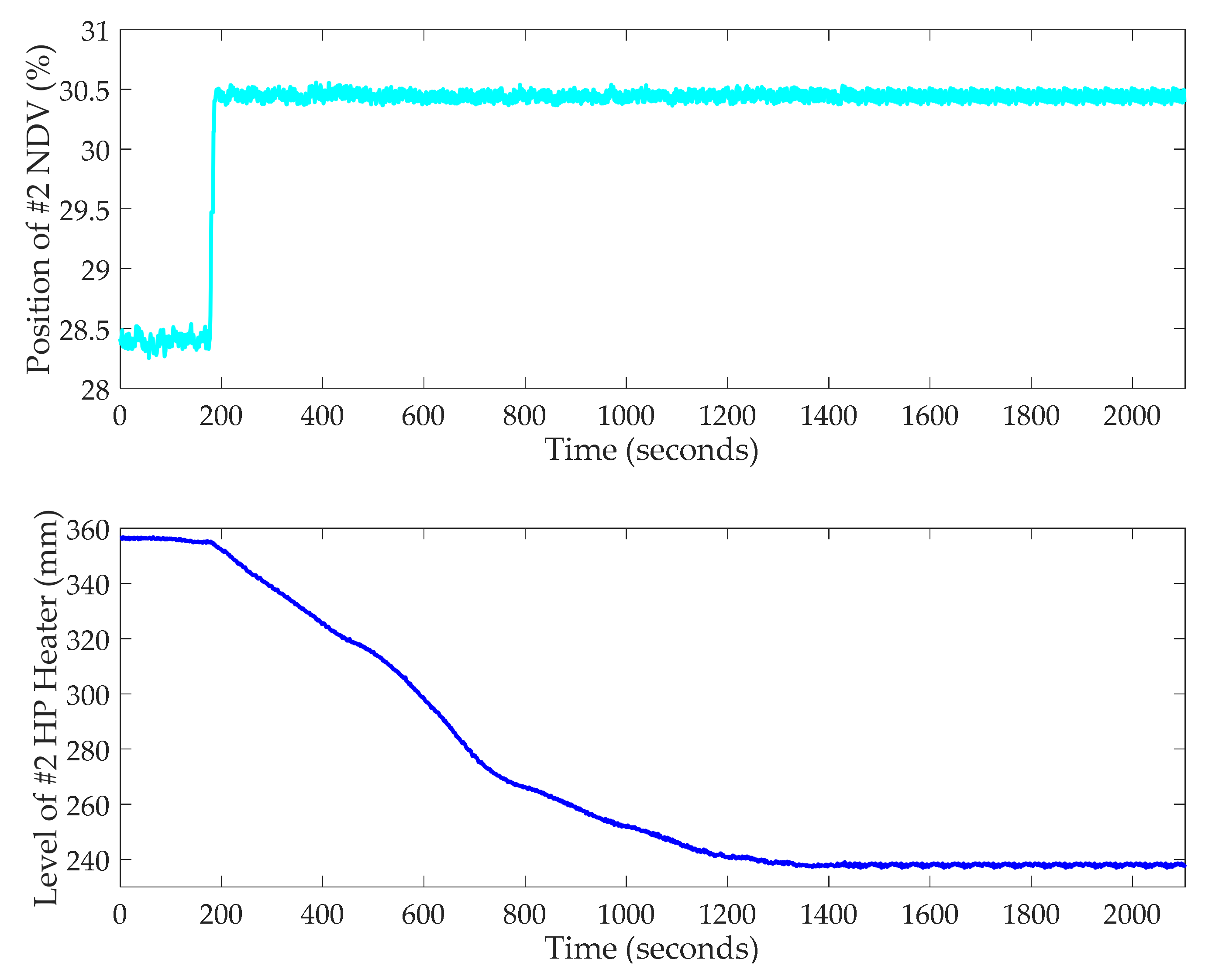
7.1. Process Description of the HP Heater
- The primary goal was to regulate the level of the HP heater as close to its set point as possible in the face of various disturbances;
- When the unit was starting or stopping, the fast reference tracking performance of the controller was required.
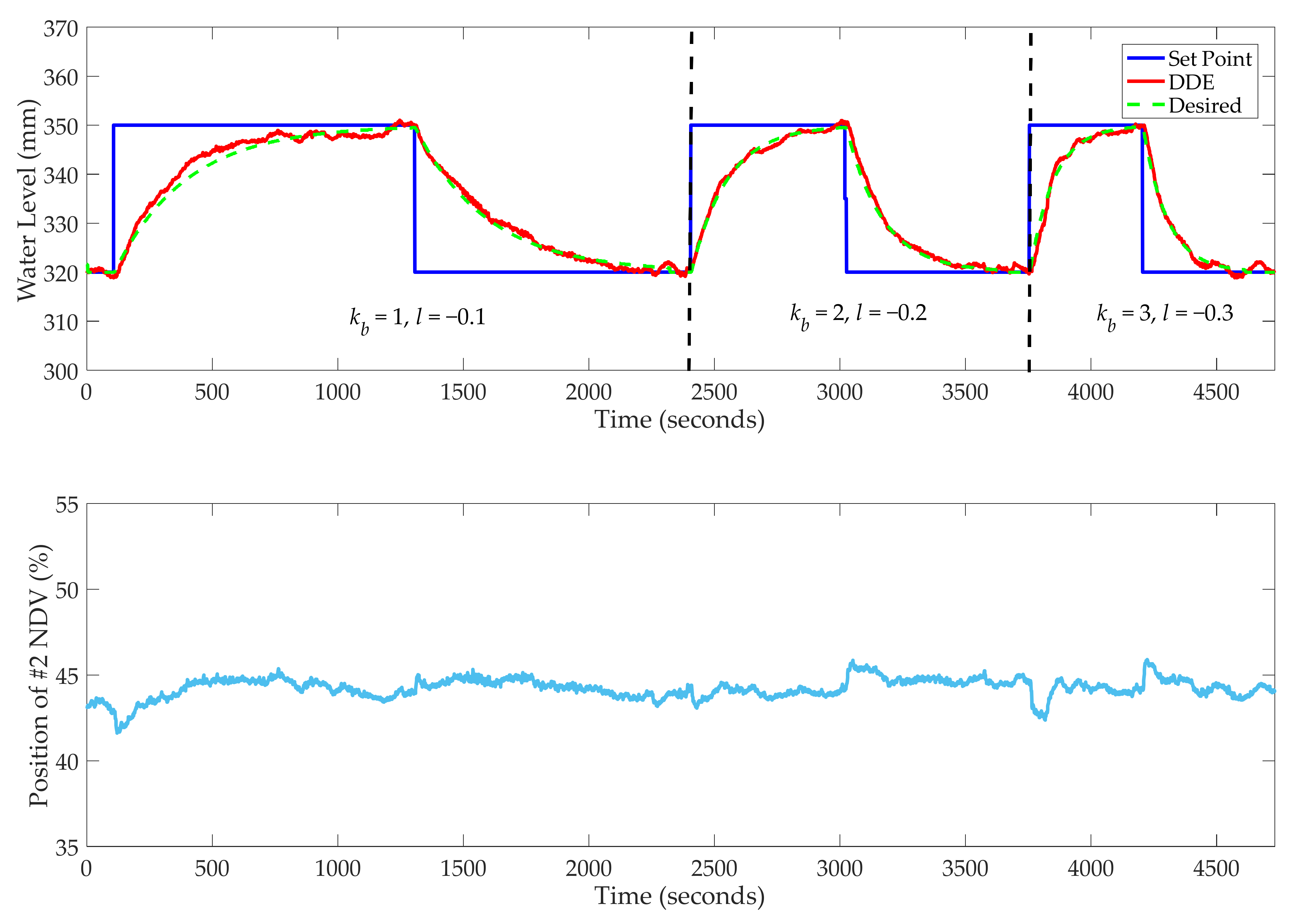
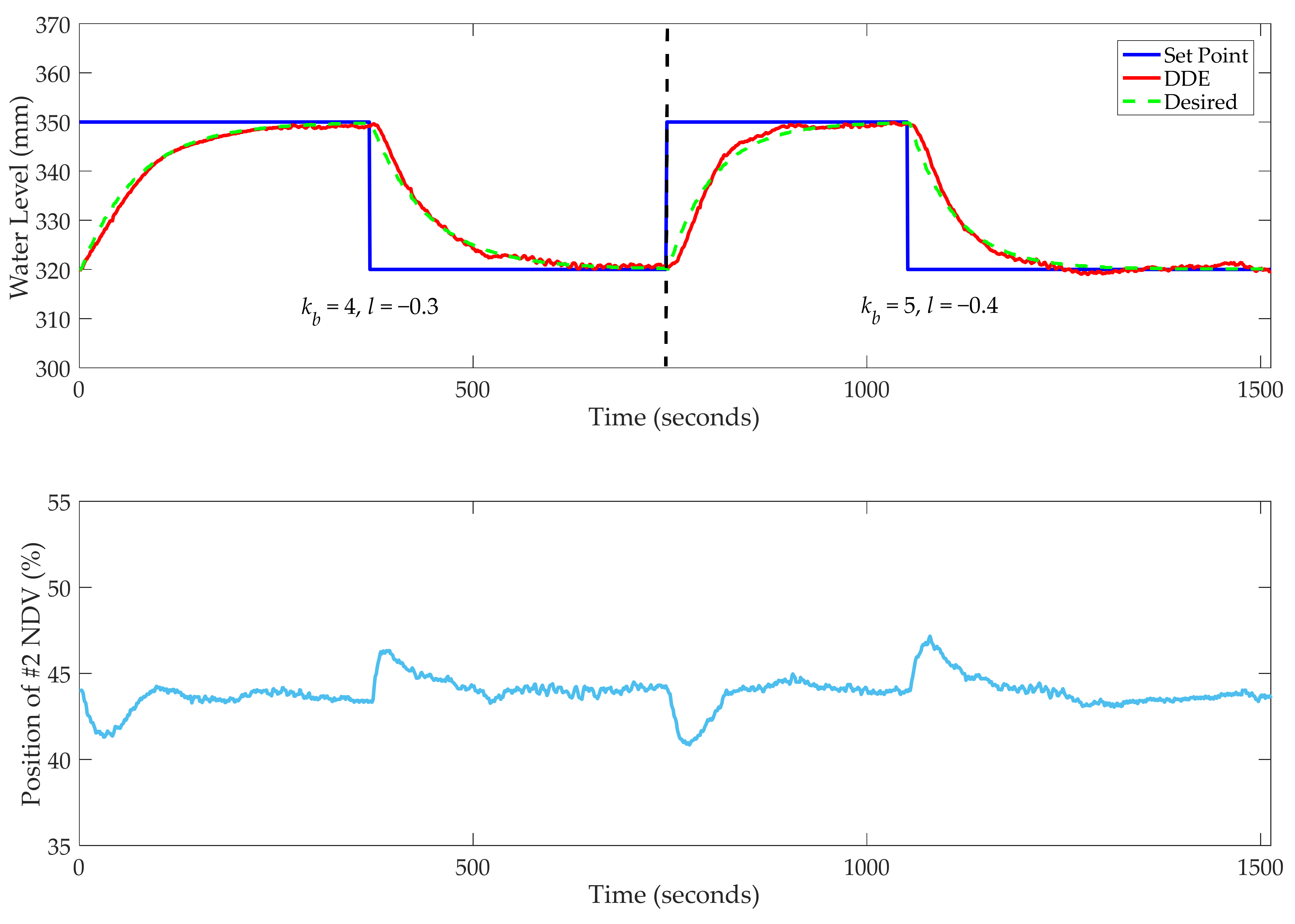
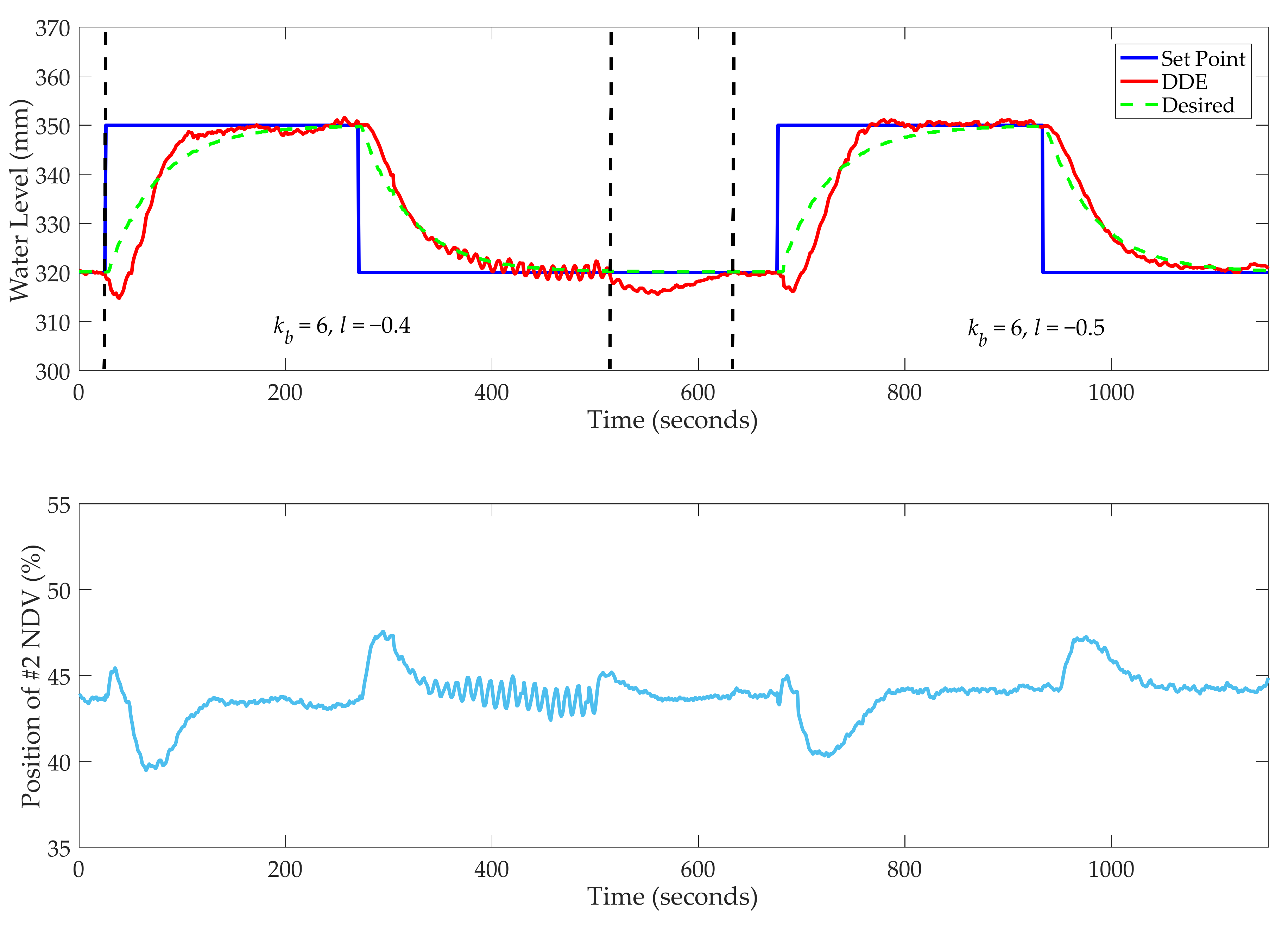
7.2. Results and Discussion of Field Tests
8. Conclusions
- The desired dynamic equation of DDE PI or PID can be designed based on the time scale of the process without using an accurate plant model;
- Constrained by the actuator and the process characteristics, in terms of fixed criteria, the limit of desired dynamic selection always exists;
- The NP-hard problem of PID tuning can be eliminated by using the proposed selection procedure;
- Tuned by the proposed method, DDE PID can obtain the fastest and moderate tracking performance and track its desired dynamic response accurately.
- Only the open-loop test is required to obtain the initial values of DDE PI or PID:
- For a determined desired dynamic equation, only one controller parameter, l, needs to be tuned;
- The practitioners who understand the fundamentals of two-degree-of-freedom (2-DOF) PI and PID can design DDE PI- and DDE PID-based on the proposed procedure.
- The theoretical criterion of tracking the desired dynamic response;
- The development of an auto-tuning toolbox for DDE PID based on the proposed procedure;
- DDE PID design for infinite-dimensional systems;
- The desired dynamic selections of TC and LADRC.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
Appendix B
Appendix C

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| kb | Controller | σ (%) | Ts (s) | IAEsp 1 | IAEud 2 |
|---|---|---|---|---|---|
| Gp1(s) | Z-N | 59.61 | 2.35 | 0.47 | 0.34 |
| IMC | 14.36 | 0.98 | 0.26 | 1.30 | |
| SIMC | 23.00 | 1.58 | 0.36 | 1.45 | |
| AMIGO | 5.56 | 1.57 | 0.57 | 0.99 | |
| DDE | 0 | 0.48 | 0.18 | 0.02 | |
| Gp2(s) | Z-N | 55.79 | 1.87 | 0.47 | 0.08 |
| IMC | 11.03 | 1.60 | 0.36 | 0.31 | |
| SIMC | 25.07 | 1.33 | 0.35 | 0.07 | |
| AMIGO | 4.45 | 2.23 | 0.75 | 0.27 | |
| DDE | 1.00 | 0.78 | 0.39 | 0.04 | |
| Gp3(s) | Z-N | 0 | 29.62 | 6.88 | 6.80 |
| IMC | 16.74 | 23.15 | 5.33 | 4.40 | |
| SIMC | 19.46 | 22.29 | 5.24 | 4.23 | |
| AMIGO | 3.82 | 16.76 | 4.92 | 4.65 | |
| DDE | 0.04 | 10.25 | 4.80 | 1.91 | |
| Gp4(s) | Z-N | 65.05 | 2.98 | 0.62 | 0.06 |
| IMC | 15.68 | 1.34 | 0.39 | 0.19 | |
| SIMC | 42.23 | 2.37 | 0.45 | 0.02 | |
| AMIGO | 6.05 | 2.10 | 0.77 | 0.17 | |
| DDE | 0 | 0.73 | 0.29 | 0.01 | |
| Gp5(s) | Z-N | 66.67 | 290.71 | 68.90 | 9.96 |
| IMC | 12.69 | 151.67 | 42.70 | 33.45 | |
| SIMC | 4.05 | 121.11 | 43.37 | 39.53 | |
| AMIGO | 0.19 | 366.31 | 156.63 | 49.63 | |
| DDE | 0.56 | 121.12 | 68.22 | 13.14 | |
| Gp6(s) | Z-N | 62.15 | 35.16 | 7.02 | 3.14 |
| IMC | 10.68 | 12.49 | 3.60 | 12.90 | |
| SIMC | 12.04 | 20.06 | 3.45 | 4.16 | |
| AMIGO | 1.99 | 21.43 | 10.70 | 9.25 | |
| DDE | 0.99 | 10.97 | 5.49 | 1.34 | |
| Gp7(s) | Z-N | 18.28 | 9.63 | 2.72 | 1.45 |
| IMC | 15.12 | 11.08 | 3.22 | 2.04 | |
| SIMC | 10.90 | 14.41 | 3.37 | 2.20 | |
| AMIGO | 5.54 | 14.09 | 5.01 | 2.57 | |
| DDE | 0.45 | 6.63 | 3.56 | 1.07 | |
| Gp8(s) | Z-N | 68.29 | 17.23 | 3.23 | 0.19 |
| IMC | 21.92 | 10.67 | 1.54 | 0.02 | |
| SIMC | 36.34 | 15.26 | 3.13 | 0.54 | |
| AMIGO | 31.06 | 28.28 | 4.97 | 5.90 | |
| DDE | 0.01 | 2.43 | 0.82 | 0.01 | |
| Gp9(s) | SIMC | 37.61 | 68.59 | 11.59 | 10.58 |
| DDE | 0 | 21.27 | 7.23 | 0.45 | |
| Gp10(s) | Z-N | 55.04 | 4.27 | 1.00 | 0.62 |
| IMC | 11.88 | 11.18 | 1.32 | 1.60 | |
| SIMC | 42.14 | 8.00 | 1.45 | 0.74 | |
| DDE | 0 | 1.73 | 0.57 | 0.06 |
References
- Wu, Z.; He, T.; Liu, Y.; Li, D.; Chen, Y. Physics-informed energy-balanced modeling and active disturbance rejection control for circulating fluidized bed units. Control Eng. Pract. 2021, 116, 104934. [Google Scholar] [CrossRef]
- Lin, B. China Energy Outlook 2020; Peking University Press: Beijing, China, 2020. [Google Scholar]
- Minorsky, N. Directional stability of automatically steered bodies. Am. Soc. Nav. Eng. 1922, 34, 280–309. [Google Scholar] [CrossRef]
- Richalet, J.; Rault, A.; Testud, J.; Papon, J. Model predictive heuristic control: Applications to industrial processes. Automatica 1978, 14, 413–428. [Google Scholar] [CrossRef]
- Qin, S.J.; Badgwell, T.A. A survey of industrial model predictive control technology. Control Eng. Pract. 2003, 11, 733–764. [Google Scholar] [CrossRef]
- Han, J. From PID to active disturbance rejection control. IEEE Trans. Ind. Electron. 2009, 56, 900–906. [Google Scholar] [CrossRef]
- Gao, Z. Scaling and bandwidth-parameterization based controller tuning. In Proceedings of the American Control Conference, Denver, CO, USA, 4–6 June 2003; pp. 4989–4996. [Google Scholar]
- Wu, Z.; Gao, Z.; Li, D.; Chen, Y.; Liu, Y. On transitioning from PID to ADRC in thermal power plants. Control Theory Technol. 2021, 19, 3–18. [Google Scholar] [CrossRef]
- Shi, G.; Wu, Z.; He, T.; Li, D.; Ding, Y.; Liu, S. Decentralized active disturbance rejection control design for the gas turbine. Meas. Control. 2020, 53, 1589–1601. [Google Scholar] [CrossRef]
- Sun, L.; You, F. Machine learning and data-driven techniques for the control of smart power generation systems: An uncertainty handling perspective. Engineering 2021, 7, 1239–1247. [Google Scholar] [CrossRef]
- Sun, L.; Xue, W.; Li, D.; Zhu, H.; Su, Z. Quantitative tuning of active disturbance rejection controller for FOPDT model with application to power plant control. IEEE Trans. Ind. Electron. 2021, 69, 805–815. [Google Scholar] [CrossRef]
- Sun, L.; Li, D.; Lee, K.Y. Optimal disturbance rejection for PI controller with constraints on relative delay margin. Control Eng. Pract. 2016, 63, 103–111. [Google Scholar] [CrossRef]
- Wu, Z.; Li, D.; Xue, Y. A new PID controller design with constraints on relative delay margin for first-order plus dead time systems. Processes 2019, 7, 713. [Google Scholar] [CrossRef] [Green Version]
- O’Dwyer, A. Handbook of PI and PID Controller Tuning Rules; Imperial College Press: London, UK, 2009. [Google Scholar]
- Ziegler, J.G.; Nichols, N.B. Optimum settings for automatic controllers. Am. Soc. Mech. Eng. 1942, 64, 759–765. [Google Scholar] [CrossRef]
- Rivera, D.E.; Morari, M.; Skogestad, S. Internal model control. 4. PID control design. Ind. Eng. Chem. Process. Des. Dev. 1986, 25, 252–265. [Google Scholar] [CrossRef]
- Skogestad, S. Simple analytic rules for model reduction and PID controller tuning. J. Process Control 2003, 13, 291–309. [Google Scholar] [CrossRef] [Green Version]
- Åström, K.J.; Panagopoulos, H.; Hägglund, T. Design of PI controllers based on non-convex optimization. Automatica 1998, 34, 585–601. [Google Scholar] [CrossRef]
- Panagopoulos, H.; Åström, K.J.; Hägglund, T. Design of PID controllers based on constrained optimization. In Proceedings of the American Control Conference, San Diego, CA, USA, 2–4 June 1999; pp. 3858–3862. [Google Scholar]
- Jia, Y.; Zhang, R.; Lv, X.; Zhang, T.; Fan, Z. Research on temperature control of fuel-cell cooling system based on variable domain fuzzy PID. Processes 2022, 10, 534. [Google Scholar] [CrossRef]
- Shan, Y.; Zhang, L.; Ma, X.; Hu, X.; Hu, Z.; Li, H.; Du, C.; Meng, Z. Application of the modified fuzzy-PID-Smith predictive compensation algorithm in a pH-controlled liquid fertilizer system. Processes 2022, 9, 1506. [Google Scholar] [CrossRef]
- Li, D.; Gao, F.; Xue, Y.; Lu, C. Optimization of decentralized PI/PID controllers based on genetic algorithm. Asian J. Control 2007, 9, 306–316. [Google Scholar] [CrossRef]
- Killingsworth, N.J.; Krstic, M. PID tuning using extremum seeking: Online, model-free performance optimization. IEEE Control. Syst. Mag. 2006, 26, 70–79. [Google Scholar]
- Shouran, M.; Alsseid, A. Particle swarm optimization algorithm-tuned fuzzy cascade fractional order PI-fractional order PD for frequency regulation of dual-area power system. Processes 2022, 10, 477. [Google Scholar] [CrossRef]
- Shi, G.; Gao, Z.; Chen, Y.; Li, D.; Ding, Y. A controller design method for high-order unstable linear time-invariant systems. ISA Trans. 2022; in press. [Google Scholar] [CrossRef] [PubMed]
- Somefun, O.A.; Akingbade, K.; Dahunsi, F. The dilemma of PID tuning. Annu. Rev. Control. 2021, 52, 65–74. [Google Scholar] [CrossRef]
- He, T. Active Disturbance Rejection Control Design and Application in Thermal Energy System. Ph.D. Thesis, Tsinghua University, Beijing, China, 28 October 2019. [Google Scholar]
- Wang, W.; Li, D.; Gao, Q.; Wang, C. A two-degree-of-freedom PID controller tuning method. J. Tsinghua Univ. 2008, 48, 1962–1966. [Google Scholar]
- Shi, G.; Li, D.; Ding, Y.; Chen, Y. Desired dynamic equational proportional-integral-derivative controller design based on probabilistic robustness. Int. J. Robust Nonlinear Control 2021. [Google Scholar] [CrossRef]
- Wang, W.; Li, D.; Xue, Y. Decentralized two degree of freedom PID tuning method for MIMO processes. In Proceedings of the IEEE International Symposium on Industrial Electronics, Seoul, Korea, 5–8 July 2009; pp. 143–148. [Google Scholar]
- Zhang, M.; Wang, J.; Li, D. Simulation analysis of PID control system based on desired dynamic equation. In Proceedings of the 8th World Congress on Intelligent Control and Automation, Jinan, China, 7–9 July 2010; pp. 3638–3644. [Google Scholar]
- Xue, Y.; Li, D.; Liu, J. DDE-based PI controller and its application to gasifier temperature control. In Proceedings of the International Conference on Control, Automation and Systems, Gyeonggi-do, Korea, 27–30 October 2010; pp. 2194–2197. [Google Scholar]
- Donghai Li, M.; Zhu, M.; Sun, L. Desired dynamic equation based PID control for combustion vibration. J. Low Freq. Noise Vib. Act. Control 2015, 34, 107–117. [Google Scholar] [CrossRef] [Green Version]
- Hu, Z.; Li, D.; Jiang, X.; Wang, J. Desired-dynamics-based design of control strategy for multivariable system with time delays. In Proceedings of the International Conference on Computer Application and System Modeling, Taiyuan, China, 22–24 October 2010; pp. 191–196. [Google Scholar]
- Wang, X.; Yan, X.; Li, D.; Sun, L. An approach for setting parameters for two-degree-of-freedom PID controllers. Algorithm 2018, 11, 48. [Google Scholar] [CrossRef] [Green Version]
- Guo, L. On critical stability of discrete-time adaptive nonlinear control. IEEE Trans. Autom. Control 1997, 42, 1488–1499. [Google Scholar]
- Xie, L.; Guo, L. How much uncertainty can be dealt with by feedback. IEEE Trans. Autom. Control 2000, 45, 2203–2217. [Google Scholar]
- Tornambè, A.; Valigi, P. A decentralized controller for the robust stabilization of a class of MIMO dynamical systems. J. Dyn. Syst. Meas. Control 1994, 116, 293–304. [Google Scholar] [CrossRef]
- Wu, Z.; Shi, G.; Li, D.; Liu, Y.; Chen, Y. Active disturbance rejection control design for high-order integral systems. ISA Trans. 2021, in press. [Google Scholar] [CrossRef]
- Cheng, X.; Wu, Z.; Li, D.; Zhu, M. Acoustic impedance tuning with active disturbance rejection control. J. Low Freq. Noise Vib. Act. Control 2018, 37, 1109–1124. [Google Scholar] [CrossRef] [Green Version]
- Khalil, H.K. Nonlinear Systems; Prentice-Hall: Upper Saddle River, NJ, USA, 1996; pp. 111–180. [Google Scholar]
- Luo, J.; Zhang, X.; Li, D.; Hu, Y. Tuning of PID controller for unstable plant systems. J. Xi’an Univ. Technol. 2015, 31, 475–481. [Google Scholar]
- Dorf, R.C.; Bishop, R.H. Modern Control Systems, 13th ed.; Pearson Education, Inc.: New York, NY, USA, 2017; p. 835. [Google Scholar]
- Jin, Y. Process Control; Tsinghua University Press: Beijing, China, 1993; pp. 26–27. (In Chinese) [Google Scholar]
- Yang, X. Automatic Control. for Thermal Process, 2nd ed.; Tsinghua University Press: Beijing, China, 2008; pp. 124–125. (In Chinese) [Google Scholar]
- Wu, Z.; Yuan, J.; Liu, Y.; Li, D.; Chen, Y. An active disturbance rejection control design with actuator rate limit compensation for the ALSTOM gasifier benchmark problem. Energy 2021, 227, 120447. [Google Scholar] [CrossRef]
- Koszaka, L.; Rudek, R.; Pozniak-Koszalka, I. An idea of using reinforcement learning in adaptive control systems. In Proceedings of the International Conference on Networking, International Conference on Systems and International Conference on Mobile Communications and Learning Technologies, Washington, DC, USA, 23–29 April 2006; p. 190. [Google Scholar]
- Åström, K.J.; Hägglund, T. Advanced PID Control; ISA-The Instrumentation, Systems, and Automation Society: Research Triangle Park, NC, USA, 2006. [Google Scholar]
- Ray, L.R.; Stengel, R.F. A Monte Carlo approach to the analysis of control system robustness. Automatica 1993, 29, 229–236. [Google Scholar] [CrossRef]
- Shi, G.; Liu, S.; Li, D.; Ding, Y.; Chen, Y. A controller synthesis method to achieve independent reference tracking performance and disturbance rejection performance. ACS Omega 2022, 7, 16164–16186. [Google Scholar] [CrossRef]
- Sun, L.; Li, D.; Hu, K.; Lee, K.Y.; Pan, F. On tuning and practical implementation of active disturbance rejection controller: A case study from a regenerative heater in a 1000 MW power plant. Ind. Eng. Chem. Res. 2016, 55, 6686–6695. [Google Scholar] [CrossRef]
- Zhao, Y.; Wang, C.; Liu, M.; Chong, D.; Yan, J. Improving operational flexibility by regulating extraction steam of high-pressure heaters on a 660 MW supercritical coal-fired power plant: A dynamic simulation. Appl. Energy 2018, 212, 1295–1309. [Google Scholar] [CrossRef]
- Wang, Z.; Pang, H. High water level automatic control logic optimization based on the least square method. Control. Eng. China 2018, 25, 897–902. [Google Scholar]








| Process | Type | Transfer Function Model |
|---|---|---|
| Gp1(s) | Low-Order System | |
| Gp2(s) | High-Order System | |
| Gp3(s) | ||
| Gp4(s) | ||
| Gp5(s) | Dead Time System | |
| Gp6(s) | ||
| Gp7(s) | Non-Minimum Phase System | |
| Gp8(s) | Integral System | |
| Gp9(s) | ||
| Gp10(s) | Unstable System |
| Process | PI/PID-b 1 | tp (s) | τ (s) | ωd0 | kb* | Limit of ωd 2 |
|---|---|---|---|---|---|---|
| Gp1(s) | PID-b | 4.14 | 0 | 1.411 | >16 | >16ωd0 |
| Gp2(s) | PID-b | 51.75 | 0 | 0.113 | >50 | >50ωd0 |
| Gp3(s) | PID-b | 9.10 | 1.5 | 0.768 | 0.9 | 0.9ωd0~ωd0 |
| Gp4(s) | PID-b | 4.19 | 0 | 1.394 | 5.1 | 5.1ωd0~5.2ωd0 |
| Gp5(s) | PI-b | 644.53 | 20 | 0.006 | 2.9 | 2.9ωd0~3ωd0 |
| Gp6(s) | PID-b | 79.71 | 1 | 0.074 | 5.3 | 5.3ωd0~5.4ωd0 |
| Gp7(s) | PID-b | 10.12 | 1.47 | 0.675 | 1.2 | 1.2ωd0~1.3ωd0 |
| Gp8(s) | PID-b | 2.38 | 0 | 2.454 | >16 | >16ωd0 |
| Gp9(s) | PID-b | 2.11 | 0 | 2.768 | 0.1 | 0.1ωd0~0.2ωd0 |
| Gp10(s) | PID-b | 1.66 | 0 | 3.518 | >16 | >16ωd0 |
| Process | PI/PID-b | Z-N {kp, Ti, Td} | IMC {kp, Ti, Td} | SIMC {kp, Ti, Td} | AMIGO {kp, Ti, Td, b} | DDE {ωd0, kb, l} |
|---|---|---|---|---|---|---|
| Gp1(s) | PID-b | {13.2, 0.2, 0.05} | {8.46, 1.1, 0.05} | {5, 0.8, 0.1} | {5.15, 0.44, 0.047, 5.15} | {1.411, 8, 28.2} |
| Gp2(s) | PID-b | {5.6, 0.3, 0.075} | {3.59, 1.05, 0.075} | {6.67, 0.4, 0.15} | {2.23, 0.53, 0.072, 2.23} | {0.113, 50, 70.5} |
| Gp3(s) | PID-b | {0.72, 5, 1.25} | {0.46, 1.5, 1.25} | {0.5, 1.5, 1} | {0.47, 2.08, 0.83, 0} | {0.768, 0.9, 6.3} |
| Gp4(s) | PID-b | {8.92, 0.30, 0.074} | {5.72, 1.1, 0.074} | {17.9, 0.23, 0.22} | {3.54, 0.54, 0.071, 3.54} | {1.394, 5.1, 25.2} |
| Gp5(s) | PI-b | {7.2, 66.67, 0} | {4.99, 170, 0} | {4, 160, 0} | {2.16, 106.64, 0, 2.16} | {0.006, 2.9, 0.042} |
| Gp6(s) | PID-b | {12.6, 4, 1} | {8.07, 21, 1} | {10, 8, 2} | {4.93, 8.59, 0.97, 4.93} | {0.074, 5.3, 0.159} |
| Gp7(s) | PID-b | {2.04, 2.94, 0.74} | {1.31, 2.5, 0.74} | {1.3, 2, 1.2} | {0.97, 2.21, 0.62, 0.97} | {0.675, 1.2, 5.6} |
| Gp8(s) | PID-b | {3.82, 1.81, 0.45} | {23.20, 1.90, 1.33} | {1.4, 2.86, 1.33} | {0.45, 13.52, 0.085, 0} | {2.454, 1, 1.4} |
| Gp9(s) | PID-b | N/A * | N/A | {0.0625, 8, 8} | N/A | {2.768, 0.1, 1.9} |
| Gp10(s) | PID-b | {9.6, 1, 0.25} | {15.31, 4.9, 0.73} | {8.93, 0.8, 0.8} | N/A | {3.518, 1, 5.1} |
| kb | l | Δr (cm) * | σ (%) | ΔIAE (%) |
|---|---|---|---|---|
| 1 | 0.001 | from 5 to 6 | 0.64 | 7.94 |
| from 6 to 5 | 0.64 | 9.29 | ||
| 2 | 0.003 | from 5 to 6 | 0.64 | 6.81 |
| from 6 to 5 | 0.64 | 7.29 | ||
| 3 | 0.004 | from 5 to 6 | 0.64 | 5.87 |
| from 6 to 5 | 0.64 | 7.11 |
| kb | l | Δr (cm) | σ (%) | ΔIAE (%) |
|---|---|---|---|---|
| 4 | 0.007 | from 5 to 6 | 3.20 | 15.39 |
| from 6 to 5 | 12.18 | 19.07 | ||
| 0.006 | from 5 to 6 | 1.92 | 13.53 | |
| from 6 to 5 | 13.46 | 17.98 | ||
| 0.005 | from 5 to 6 | 0.64 | 12.51 | |
| from 6 to 5 | 10.90 | 16.44 |
| Z-N {kp, Ti} | IMC {kp, Ti} | SIMC {kp, Ti} | AMIGO {kp, Ti, b} | DDE {ωd0, kb, l} |
|---|---|---|---|---|
| {17.46, 16.67} | {158.12, 99.5} | {131.08, 40} | {81.56, 41.45, 81.56} | {0.0103, 3, 0.004} |
| Controller | σ (%) | Ts (s) | emax (cm) |
|---|---|---|---|
| Z-N | 35.26 | 1023 | 0.42 |
| IMC | N/A | N/A | N/A |
| SIMC | 172.44 | N/A | N/A |
| AMIGO | 1.92 | 123 | 0.20 |
| DDE | 0.64 | 87 | 0.20 |
| kb | l | Δr (mm) * | σ (%) | ΔIAE (%) |
|---|---|---|---|---|
| 1 | −0.1 | from 320 to 350 | 0.84 | 9.72 |
| from 350 to 320 | 0.73 | 2.88 | ||
| 2 | −0.2 | from 320 to 350 | 0.74 | 0.28 |
| from 350 to 320 | 0.65 | 9.89 | ||
| 3 | −0.3 | from 320 to 350 | 0.45 | 4.91 |
| from 350 to 320 | 0.83 | 4.69 | ||
| 4 | −0.3 | from 320 to 350 | 0 | 9.94 |
| from 350 to 320 | 0 | 4.89 | ||
| 5 | −0.4 | from 320 to 350 | 0.32 | 0.40 |
| from 350 to 320 | 0.43 | 2.10 |
| kb | l | Δr (mm) | σ (%) | ΔIAE (%) |
|---|---|---|---|---|
| 6 | −0.5 | from 320 to 350 | 3.75 | 11.13 |
| from 350 to 320 | 0 | 4.96 | ||
| −0.4 | from 320 to 350 | 1.10 | 10.43 | |
| from 350 to 320 | 5.04 | 8.22 |
| Controller | Δr (mm) | σ (%) | Ts (s) | e+ (mm) | e− (mm) |
|---|---|---|---|---|---|
| PIf | from 320 to 350 | 40.33 | 175 | 15.76 | 13.17 |
| from 350 to 320 | 30.53 | 243 | |||
| DDE | from 320 to 350 | 0.32 | 138 | 8.54 | 8.41 |
| from 350 to 320 | 0.43 | 143 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shi, G.; Wu, Z.; Liu, S.; Li, D.; Ding, Y.; Liu, S. Research on the Desired Dynamic Selection of a Reference Model-Based PID Controller: A Case Study on a High-Pressure Heater in a 600 MW Power Plant. Processes 2022, 10, 1059. https://doi.org/10.3390/pr10061059
Shi G, Wu Z, Liu S, Li D, Ding Y, Liu S. Research on the Desired Dynamic Selection of a Reference Model-Based PID Controller: A Case Study on a High-Pressure Heater in a 600 MW Power Plant. Processes. 2022; 10(6):1059. https://doi.org/10.3390/pr10061059
Chicago/Turabian StyleShi, Gengjin, Zhenlong Wu, Shaojie Liu, Donghai Li, Yanjun Ding, and Shangming Liu. 2022. "Research on the Desired Dynamic Selection of a Reference Model-Based PID Controller: A Case Study on a High-Pressure Heater in a 600 MW Power Plant" Processes 10, no. 6: 1059. https://doi.org/10.3390/pr10061059
APA StyleShi, G., Wu, Z., Liu, S., Li, D., Ding, Y., & Liu, S. (2022). Research on the Desired Dynamic Selection of a Reference Model-Based PID Controller: A Case Study on a High-Pressure Heater in a 600 MW Power Plant. Processes, 10(6), 1059. https://doi.org/10.3390/pr10061059