


Adaptive Composite Fault Diagnosis of Rolling Bearings Based on the CLNGO Algorithm
Abstract
1. Introduction
- Chaos leadership strategy to improve the NGO algorithm;
- CLNGO algorithm to optimize FMD to select the optimal number of modes n and filter length L;
- CLNGO algorithm to optimize MNAD to select the optimal filter length L and noise ratio ;
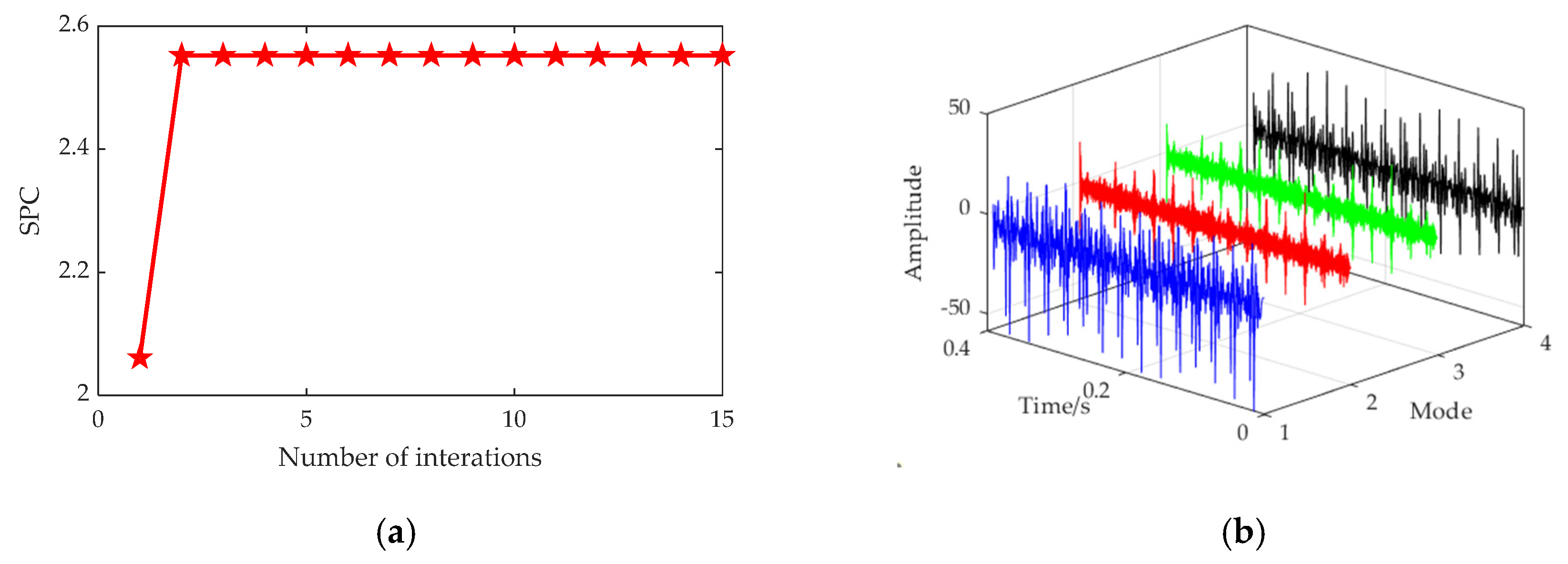
- Proposed index to measure signal sparsity: SPC.
2. Materials and Methods
2.1. Northern Goshawk Optimization Algorithm (NGO)
- Phase 1: Exploration:
- 2.
- Phase 2: Exploitation:
2.2. Feature Mode Decomposition (FMD)
- Input signal and parameters of FMD;
- Initialize the filter bank;
- The filtered signal is obtained through Equation , and is the convolution operation;
- Estimate the period and update the filter coefficients;
- Determine whether the iterations termination condition is satisfied. If yes, next step, otherwise, return to 3;
- Compute the CC value for each of the two modes, construct the matrix and find the mode with the largest CC value;
- Determine whether K reaches the value of n. If yes, next step, otherwise, return to 3;
- End the FMD and save the results.
2.3. Minimum Noise Amplitude Deconvolution (MNAD)
- Calculate the gradient:
- 2.
- Update filter with the Adam algorithm;
3. Proposed Methods
3.1. Chaotic Leadership Northern Goshawk Optimization (CLNGO)
3.2. CLNGO Optimized FDM and MNAD
4. Performance Analysis of the CLNGO Algorithm
4.1. High-Dimensional Single Objective Functions
4.2. High-Dimensional Multi-Objective Test Function
4.3. Low-Dimensional Test Functions
5. Experimental Study
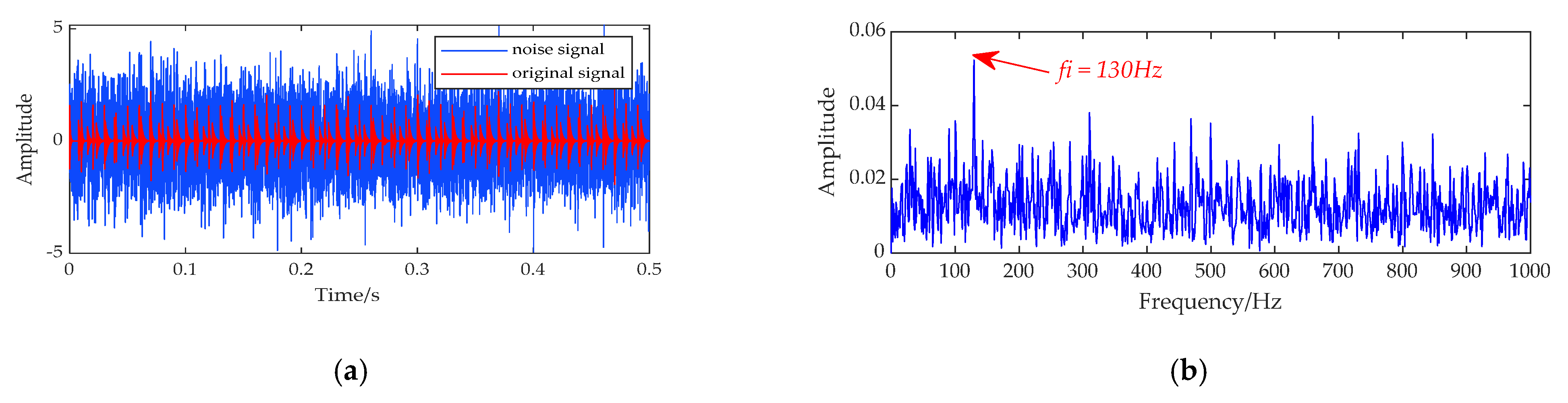
5.1. Simulation Signal
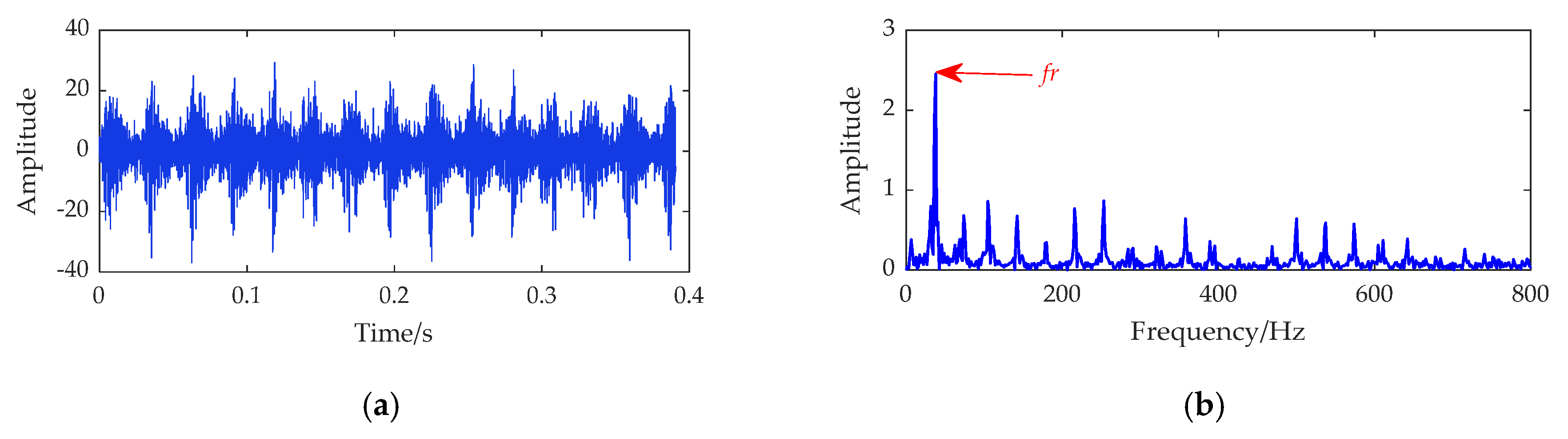
5.2. Experimental Analysis
5.2.1. Inner Ring Fault
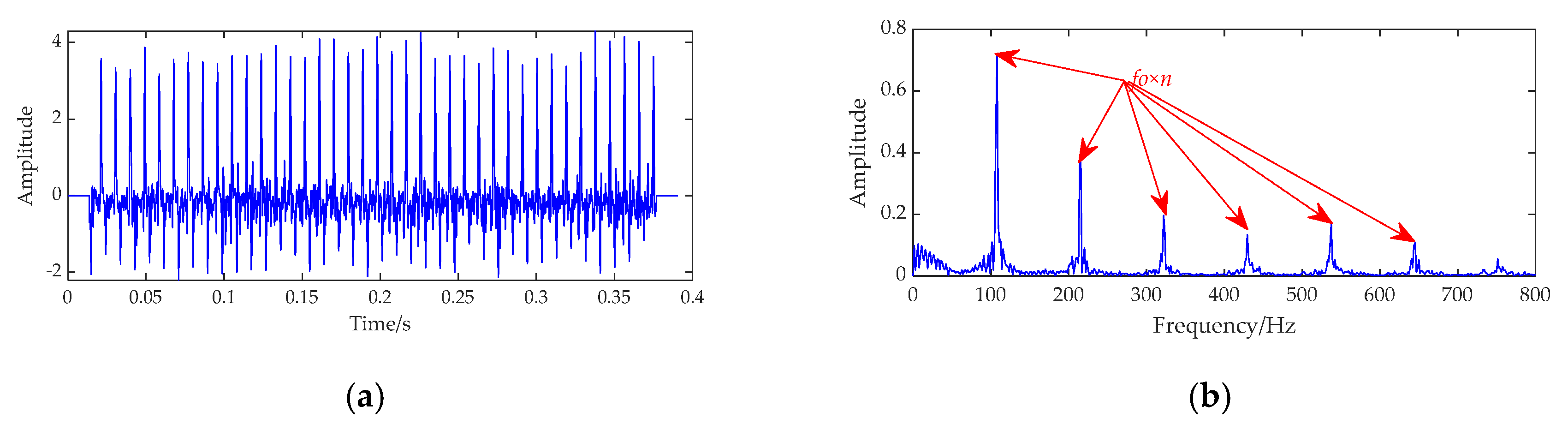
5.2.2. Outer Ring Fault
5.2.3. Composite Fault (Inner Ring and Outer Ring Damage)
5.2.4. Comparison and Analysis
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Functions | Value | WOA | GWO | NGO | HBA | PSO | SFLA | CLNGO |
|---|---|---|---|---|---|---|---|---|
| f1 | Ave | 1.84 × 10−96 | 1.12 × 10−40 | 4.78 × 10−89 | 1.29 × 10−160 | 2.65 × 10−32 | 1.43 × 10−06 | 4.79 × 10−298 |
| Std | 1.8729 × 10−191 | 2.6859 × 10−80 | 3.1775 × 10−177 | 0 | 3.2810 × 10−63 | 1.8442 × 10−12 | 0 | |
| Best | 5.4721 × 10−102 | 7.3755 × 10−42 | 3.6731 × 10−90 | 4.3531 × 10−167 | 5.7520 × 10−35 | 5.7835 × 10−07 | 1.6951 × 10−303 | |
| f2 | Ave | 7.26 × 10−58 | 4.61 × 10−24 | 1.05 × 10−45 | 2.92 × 10−85 | 1.67 × 10−34 | 7.97 × 10−09 | 1.52 × 10−149 |
| Std | 8.23 × 10−115 | 8.54 × 10−48 | 3.39 × 10−91 | 2.88 × 10−169 | 8.04 × 10−68 | 1.45 × 10−17 | 5.17 × 10−297 | |
| Best | 7.47 × 10−62 | 1.60 × 10−24 | 1.79 × 10−46 | 4.59 × 10−87 | 1.37 × 10−36 | 2.81 × 10−09 | 1.16 × 10−151 | |
| f3 | Ave | 1.19 × 10+04 | 7.84 × 10−10 | 1.07 × 10−22 | 1.12 × 10−118 | 1.62 × 10−32 | 9.82 × 10−07 | 1.81 × 10−298 |
| Std | 6.50 × 10+07 | 4.76 × 10−18 | 3.31 × 10−44 | 1.07 × 10−235 | 1.05 × 10−63 | 4.02 × 10−13 | 0 | |
| Best | 1.63 × 10+03 | 7.06 × 10−15 | 9.69 × 10−28 | 1.21 × 10−124 | 3.18 × 10−34 | 5.23 × 10−07 | 9.03 × 10−303 | |
| f4 | Ave | 2.37 × 10+01 | 1.83 × 10−10 | 4.46 × 10−38 | 7.04 × 10−69 | 7.45 × 10−31 | 2.05 × 10−06 | 9.95 × 10−149 |
| Std | 7.47 × 10+02 | 4.02 × 10−21 | 2.75 × 10−76 | 4.09 × 10−137 | 1.36 × 10−60 | 4.49 × 10−12 | 3.46 × 10−297 | |
| Best | 6.11 × 10−05 | 7.27 × 10−11 | 2.42 × 10−38 | 3.28 × 10−71 | 6.22 × 10−36 | 5.47 × 10−07 | 1.30 × 10−149 | |
| f5 | Ave | 0 | 7.96 × 10−14 | 0 | 0 | 1.58 × 10−34 | 3.22 × 10−09 | 0 |
| Std | 0 | 1.15 × 10−26 | 0 | 0 | 1.24 × 10−67 | 1.87 × 10−18 | 0 | |
| Best | 0 | 0 | 0 | 0 | 1.04 × 10−37 | 1.89 × 10−09 | 0 | |
| f6 | Ave | 5.51 × 10−15 | 2.87 × 10−14 | 6.93 × 10−15 | 8.88 × 10−16 | 8.61 × 10−01 | 3.45 × 10−04 | 8.88 × 10−16 |
| Std | 4.48 × 10−30 | 2.68 × 10−30 | 2.74 × 10−30 | 1.01 × 10−62 | 4.73 × 10−01 | 2.03 × 10−08 | 1.01 × 10−62 | |
| Best | 8.88 × 10−16 | 2.58 × 10−14 | 4.44 × 10−15 | 8.88 × 10−16 | 5.06 × 10−14 | 1.62 × 10−04 | 8.88 × 10−16 | |
| f7 | Ave | 1.89 × 10−03 | 5.86 × 10−04 | 0 | 0 | 1.39 × 10−02 | 8.86 × 10−03 | 0 |
| Std | 1.07 × 10−04 | 4.97 × 10−06 | 0 | 0 | 3.32 × 10−04 | 1.36 × 10−04 | 0 | |
| Best | 0 | 0 | 0 | 0 | 0 | 1.49 × 10−06 | 0 | |
| f8 | Ave | 1.30 × 10−03 | 1.42 × 10−02 | 1.01 × 10−06 | 7.06 × 10−09 | 1.94 × 10−32 | 3.69 × 10−07 | 3.10 × 10−01 |
| Std | 2.23 × 10−06 | 9.12 × 10−05 | 1.97 × 10−13 | 1.15 × 10−16 | 7.15 × 10−65 | 5.22 × 10−13 | 6.48 × 10−03 | |
| Best | 2.59 × 10−04 | 1.42 × 10−06 | 2.46 × 10−07 | 2.15 × 10−10 | 1.59 × 10−32 | 2.07 × 10−08 | 1.52 × 10−01 | |
| f9 | Ave | 4.07 | 2.61 | 1.48 | 1.36 | 2.30 | 1.07 | 1.06 |
| Std | 12.6 | 3.32 | 20.4 | 50.8 | 2.65 | 8.03 × 10−02 | 3.94 × 10−02 | |
| Best | 0.998 | 0.998 | 0.998 | 0.998 | 0.998 | 0.998 | 0.998 | |
| f10 | Ave | 6.30 × 10−04 | 8.15 × 10−04 | 4.72 × 10−04 | 1.67 × 10−03 | 7.60 × 10−04 | 5.19 × 10−04 | 3.08 × 10−04 |
| Std | 1.18 × 10−07 | 1.44 × 10−06 | 1.13 × 10−08 | 1.61 × 10−05 | 1.58 × 10−07 | 1.46 × 10−08 | 1.85 × 10−15 | |
| Best | 3.77 × 10−04 | 4.55 × 10−04 | 3.52 × 10−04 | 3.08 × 10−04 | 4.13 × 10−04 | 3.40 × 10−04 | 3.07 × 10−04 | |
| f11 | Ave | −3.24 | −3.27 | −3.32 | −3.25 | −3.28 | −3.28 | −3.32 |
| Std | 8.58 × 10−03 | 5.73 × 10−03 | 8.51 × 10−10 | 4.12 × 10−03 | 3.25 × 10−03 | 3.40 × 10−03 | 7.27 × 10−10 | |
| Best | −3.31 | −3.32 | −3.32 | −3.32 | −3.32 | −3.32 | −3.32 | |
| f12 | Ave | −6.95 | −9.31 | −10.4 | −8.68 | −5.06 | −9.38 | −10.4 |
| Std | 6.59 | 5.78 | 9.09 × 10−05 | 10.1 | 5.58 | 6.99 | 1.68 × 10−06 | |
| Best | −10.4 | −10.4 | −10.4 | −10.4 | −10.4 | −10.4 | −10.4 |
References
- Berredjem, T.; Benidir, M. Bearing faults diagnosis using fuzzy expert system relying on an Improved Range Overlaps and Similarity method. Expert Syst. Appl. 2018, 108, 134–142. [Google Scholar] [CrossRef]
- Qian, C.H.; Jiang, Q.S.; Shen, Y.; Huo, C.; Zhang, Q. An intelligent fault diagnosis method for rolling bearings based on feature transfer with improved DenseNet and joint distribution adaptation. Meas. Sci. Technol. 2022, 33, 025101. [Google Scholar] [CrossRef]
- Song, X.J.; Zhao, W.X. A Review of Rolling Bearings Fault Diagnosis Approaches Using AC Motor Signature Analysis. Proc. CSEE 2021, 42, 1582–1596. [Google Scholar] [CrossRef]
- Zhang, Y.H.; Zhou, T.T.; Subburam, V. Fault diagnosis of rotating machinery based on recurrent neural networks. Measurement 2021, 171, 108774. [Google Scholar] [CrossRef]
- Zhang, F.; Sun, W.L.; Wang, H.; Xu, T. Fault Diagnosis of a Wind Turbine Gearbox Based on Improved Variational Mode Algorithm and Information Entropy. Entropy 2021, 23, 794. [Google Scholar] [CrossRef]
- Cai, J.H.; Hu, W.W.; Wang, X.C. Fault diagnosis of rolling bearing based on EMD-ICA de-noising. J. Mach. Des. 2015, 32, 17–23. [Google Scholar] [CrossRef]
- Bai, L.; Xi, W. Early Fault Diagnosis of Rolling Bearing Based Empirical Wavelet Transform and Spectral Kurtosis. In Proceedings of the 2018 IEEE International Conference on Prognostics and Health Management (ICPHM), Seattle, WA, USA, 11–13 June 2018; pp. 1–6. [Google Scholar]
- Gundewar, S.K.; Kane, P.V. Bearing fault diagnosis using time segmented Fourier synchrosqueezed transform images and convolution neural network. Measurement 2022, 203, 111855. [Google Scholar] [CrossRef]
- Dragomiretskiy, K.; Zosso, D. Variational Mode Decomposition. IEEE Trans. Signal Process. 2014, 62, 531–544. [Google Scholar] [CrossRef]
- Ye, M.; Yan, X.; Jia, M. Rolling Bearing Fault Diagnosis Based on VMD-MPE and PSO-SVM. Entropy 2021, 23, 762. [Google Scholar] [CrossRef]
- Cheng, J.; Yang, Y.; Shao, H.; Pan, H.; Zheng, J.; Cheng, J. Enhanced periodic mode decomposition and its application to composite fault diagnosis of rolling bearings. ISA Trans. 2021, 125, 474–491. [Google Scholar] [CrossRef]
- Li, T.Y.; Kou, Z.M.; Wu, J.; Yang, F. Application of Adaptive MOMEDA with Iterative Autocorrelation to Enhance Weak Features of Hoist Bearings. Entropy 2021, 23, 789. [Google Scholar] [CrossRef] [PubMed]
- Zeng, M.; Chen, Z. SOSO Boosting of the K-SVD Denoising Algorithm for Enhancing Fault-Induced Impulse Responses of Rolling Element Bearings. IEEE Trans. Ind. Electron. 2020, 67, 1282–1292. [Google Scholar] [CrossRef]
- Miao, Y.H.; Zhang, B.; Li, C.; Lin, J.; Zhang, D. Feature Mode Decomposition: New Decomposition Theory for Rotating Machinery Fault Diagnosis. IEEE Trans. Ind. Electron. 2022, 70, 1949–1960. [Google Scholar] [CrossRef]
- Wiggins, R.A. Minimum entropy deconvolution. Geoexploration 1978, 16, 21–35. [Google Scholar] [CrossRef]
- Sun, Y.H.; Yu, J.B. Adaptive Sparse Representation-Based Minimum Entropy Deconvolution for Bearing Fault Detection. IEEE Trans. Instrum. Meas. 2022, 71, 3513010. [Google Scholar] [CrossRef]
- Sun, H.; Liang, F.W.; Liu, Y.; Liu, K.; Wang, Z.; Zhang, T. Application of a Novel Improved Adaptive CYCBD Method in Gearbox Compound Fault Diagnosis. IEEE Access 2021, 9, 133835–133848. [Google Scholar] [CrossRef]
- Mcdonald, G.L.; Zhao, Q.; Zuo, M.J. Maximum correlated kurtosis deconvolution and application on gear tooth chip fault detection. Mech. Syst. Signal Process. 2012, 33, 237–255. [Google Scholar] [CrossRef]
- Fang, B.; Hu, J.; Yang, C.; Cao, Y.; Jia, M. A blind deconvolution algorithm based on backward automatic differentiation and its application to rolling bearing fault diagnosis. Meas. Sci. Technol. 2022, 33, 025009. [Google Scholar] [CrossRef]
- Mirjalili, S.; Lewis, A. The Whale Optimization Algorithm. Adv. Eng. Softw. 2016, 95, 51–67. [Google Scholar] [CrossRef]
- Mirjalili, S.; Lewis, A. Grey Wolf Optimizer. Adv. Eng. Softw. 2013, 69, 46–61. [Google Scholar] [CrossRef]
- Hashim, F.A.; Houssein, E.H.; Hussain, K.; Mabrouk, M.S.; Al-Atabany, W. Honey Badger Algorithm: New Metaheuristic Algorithm for Solving Optimization Problems. Math. Comput. Simul. 2021, 192, 84–110. [Google Scholar] [CrossRef]
- Heidari, A.A.; Faris, H.; Aljarah, I.; Mafarja, M.; Chen, H. Harris hawks optimization: Algorithm and applications. Future Gener. Comput. Syst. 2019, 97, 849–872. [Google Scholar] [CrossRef]
- Dehghani, M.; Hubalovsky, S.; Trojovsky, P. Northern Goshawk Optimization: A New Swarm-Based Algorithm for Solving Optimization Problems. IEEE Access 2021, 9, 162059–162080. [Google Scholar] [CrossRef]
- Ma, L.L.; Jiang, H.; Ma, T.; Zhang, X.; Shen, Y.; Xia, L. Fault Prediction of Rolling Element Bearings Using the Optimized MCKD–LSTM Model. Machines 2022, 10, 342. [Google Scholar] [CrossRef]
- Wang, B.; Lei, Y.G.; Li, N. A Hybrid Prognostics Approach for Estimating Remaining Useful Life of Rolling Element Bearings. J. Eng. 2020, 69, 401–412. [Google Scholar] [CrossRef]
- Wang, R.X.; Jiang, H.K.; Zhu, K.; Wangm, Y.; Liu, C. A deep feature enhanced reinforcement learning method for rolling bearing fault diagnosis. Adv. Eng. Inform. 2022, 54, 101750. [Google Scholar] [CrossRef]
- Tang, J.H.; Wu, J.M.; Hu, B.; Liu, J. Towards a fault diagnosis method for rolling bearing with Bi-directional deep belief network. Appl. Acoust. 2022, 192, 108727. [Google Scholar] [CrossRef]
- Li, J.; Liu, Y.H.; Li, Q.J. Intelligent fault diagnosis of rolling bearings under imbalanced data conditions using attention-based deep learning method. Measurement 2022, 189, 110500. [Google Scholar] [CrossRef]
- Li, Y.F.; Han, T. Deep Learning Based Industrial Equipment Prognostics and Health Management: A Review. J. Vib. Meas. Diagn. 2022, 42, 835–847+1029. [Google Scholar] [CrossRef]
- Miao, Y.H.; Wang, J.J.; Zhang, B.Y.; Li, H. Practical framework of Gini index in the application of machinery fault feature extraction. Mech. Syst. Signal Process. 2021, 165, 108333. [Google Scholar] [CrossRef]
- Lei, Y.G.; Han, T.Y.; Wang, B.; Li, N.; Yan, T.; Yang, J. XJTU-SY Rolling Element Bearing Accelerated Life Test Datasets: A Tutorial. J. Mech. Eng. 2019, 55, 1–6. [Google Scholar] [CrossRef]





















| Function | Range | |
|---|---|---|
| [−100, 100] | 0 | |
| [−10, 10] | 0 | |
| [−100, 100] | 0 | |
| [−100, 100] | 0 |
| Function | Range | |
|---|---|---|
| [−5.12, 5.12] | 0 | |
| [−32, 32] | 0 | |
| [−600, 600] | 0 | |
| [−50, 50] | 0 |
| Function | Range | Dim | |
|---|---|---|---|
| [−65, 65] | 2 | 1 | |
| [−5, 5] | 4 | 0.0003 | |
| [0, 1] | 6 | −3.32 | |
| [0, 10] | 4 | −10.403 |
| Middle Diameter of Bearing | Contact Angle | Diameter of Ball Bearing | Number of Ball Bearings |
|---|---|---|---|
| D = 34.55 mm | d = 7.92 mm | z = 8 |
| Algorithm | MNAD | VMD | FMD | MCKD | MOMEDA |
|---|---|---|---|---|---|
| Parameter Settings | L = 40 ρ = 5 | K = 6 α = 1500 | L = 40 N = 5 | L = 600 T = 230 | L = 600 T =230 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, S.; Ma, J. Adaptive Composite Fault Diagnosis of Rolling Bearings Based on the CLNGO Algorithm. Processes 2022, 10, 2532. https://doi.org/10.3390/pr10122532
Yu S, Ma J. Adaptive Composite Fault Diagnosis of Rolling Bearings Based on the CLNGO Algorithm. Processes. 2022; 10(12):2532. https://doi.org/10.3390/pr10122532
Chicago/Turabian StyleYu, Sen, and Jie Ma. 2022. "Adaptive Composite Fault Diagnosis of Rolling Bearings Based on the CLNGO Algorithm" Processes 10, no. 12: 2532. https://doi.org/10.3390/pr10122532
APA StyleYu, S., & Ma, J. (2022). Adaptive Composite Fault Diagnosis of Rolling Bearings Based on the CLNGO Algorithm. Processes, 10(12), 2532. https://doi.org/10.3390/pr10122532