A Smart Sensor Data Transmission Technique for Logistics and Intelligent Transportation Systems



Abstract
:1. Introduction
2. SGM-MAC Scheme
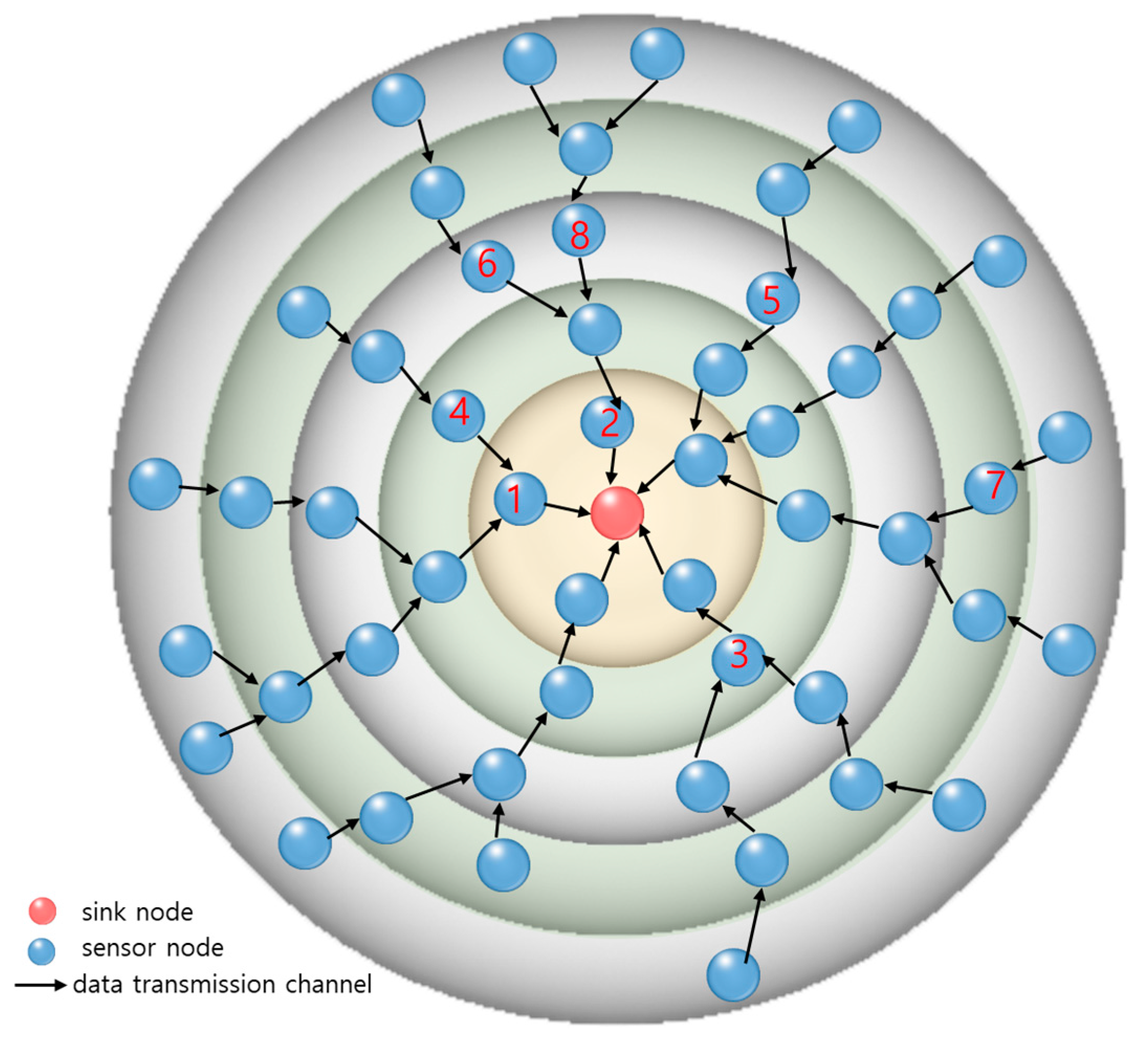
2.1. Smart Sensor Node Grouping
2.1.1. Initial Group ID Setting
- (1)
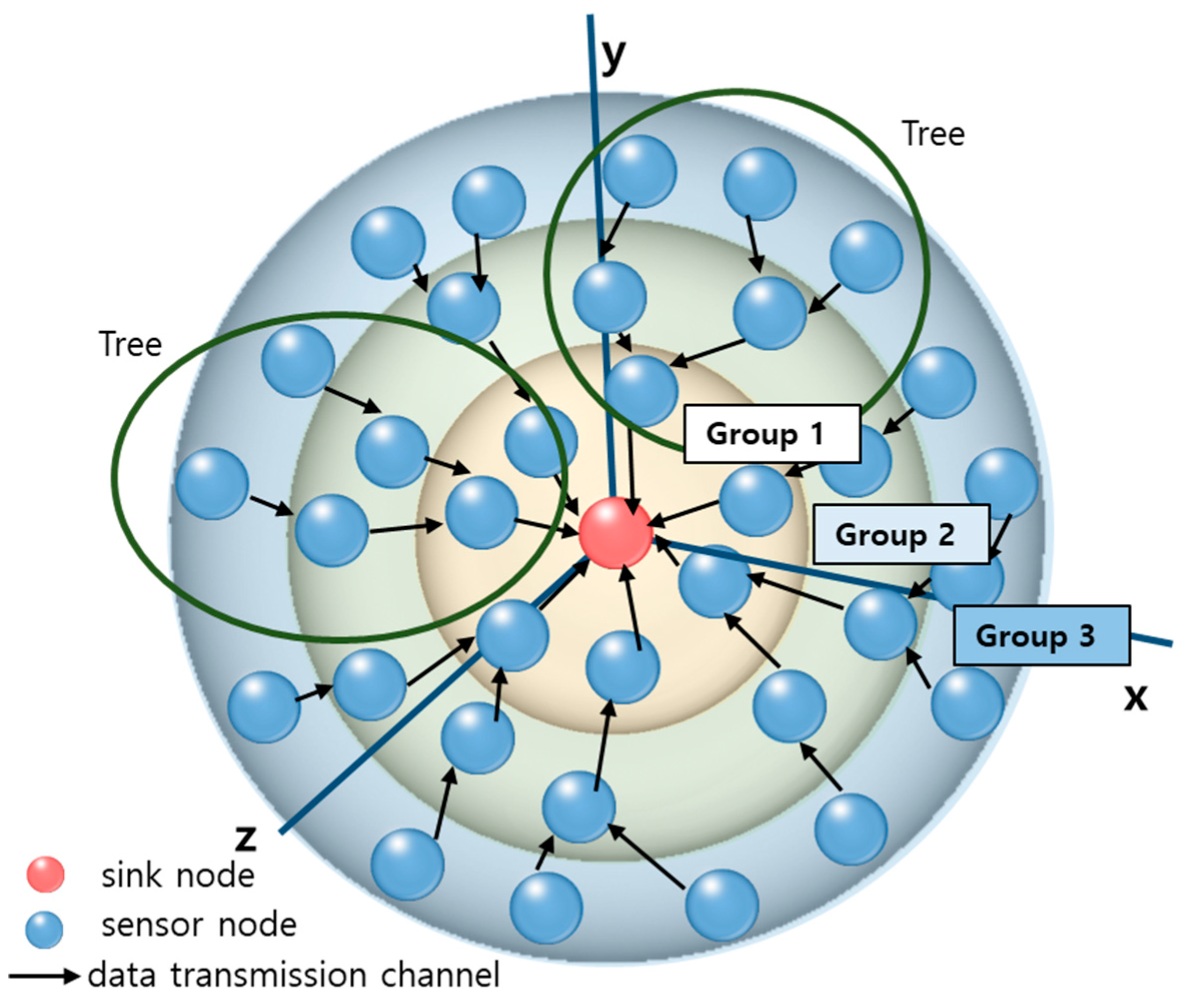
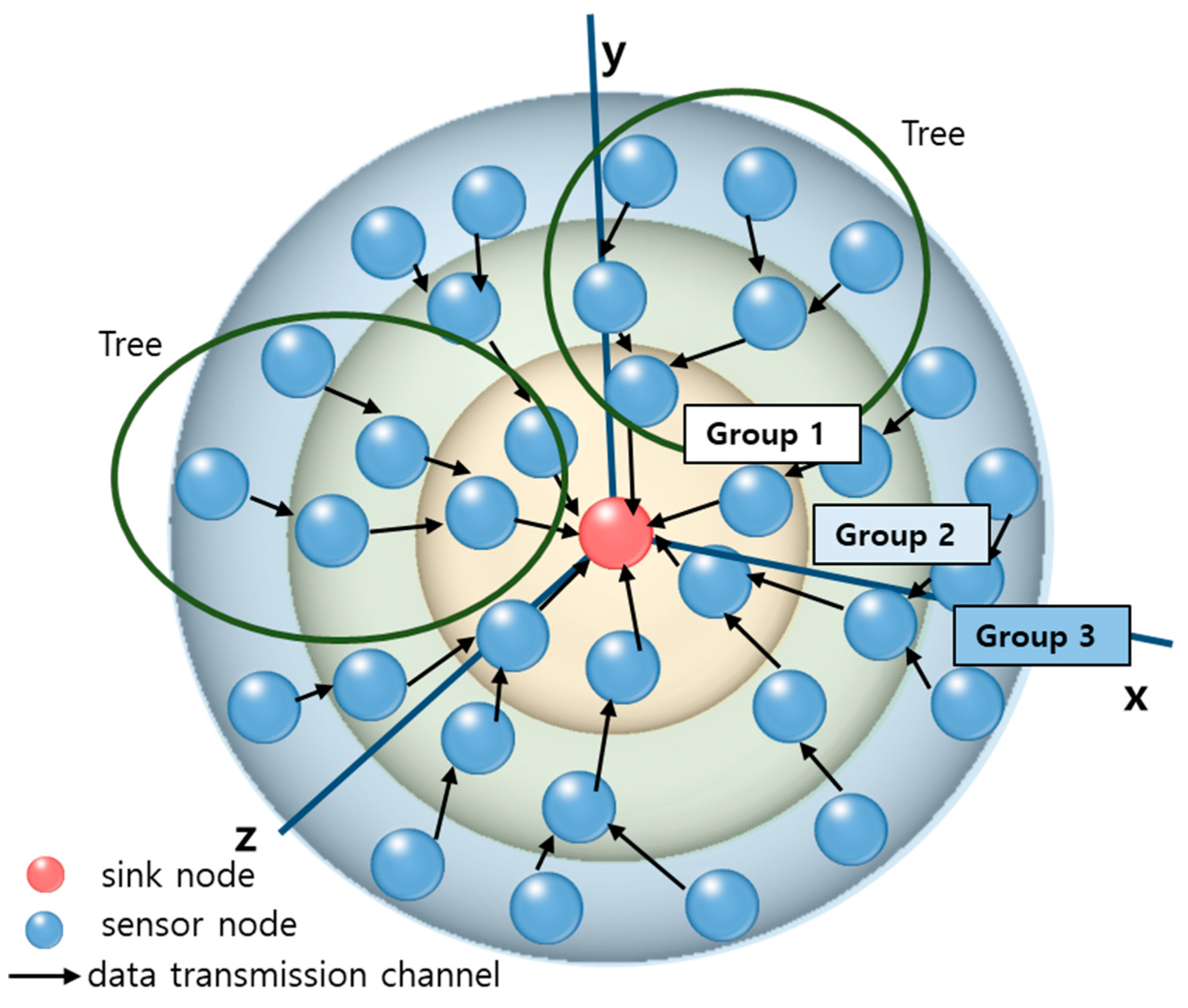
- A sink node sets its group ID to 0 and generates advertisement packets that include the group and version information for group setting, sending the packets to every smart sensor node within a distance that allows transmission between them.
- (2)
- If a smart sensor node with no group ID setting receives advertisement packets, it adds 1 to the received group ID and sets the value as its group ID. Once the group setting version is renewed, an advertisement packet that includes these two sets of information is generated and transmitted to adjacent smart sensor nodes within the distance. The smart sensor node remembers its position in order to trace the track of its movement in the future.
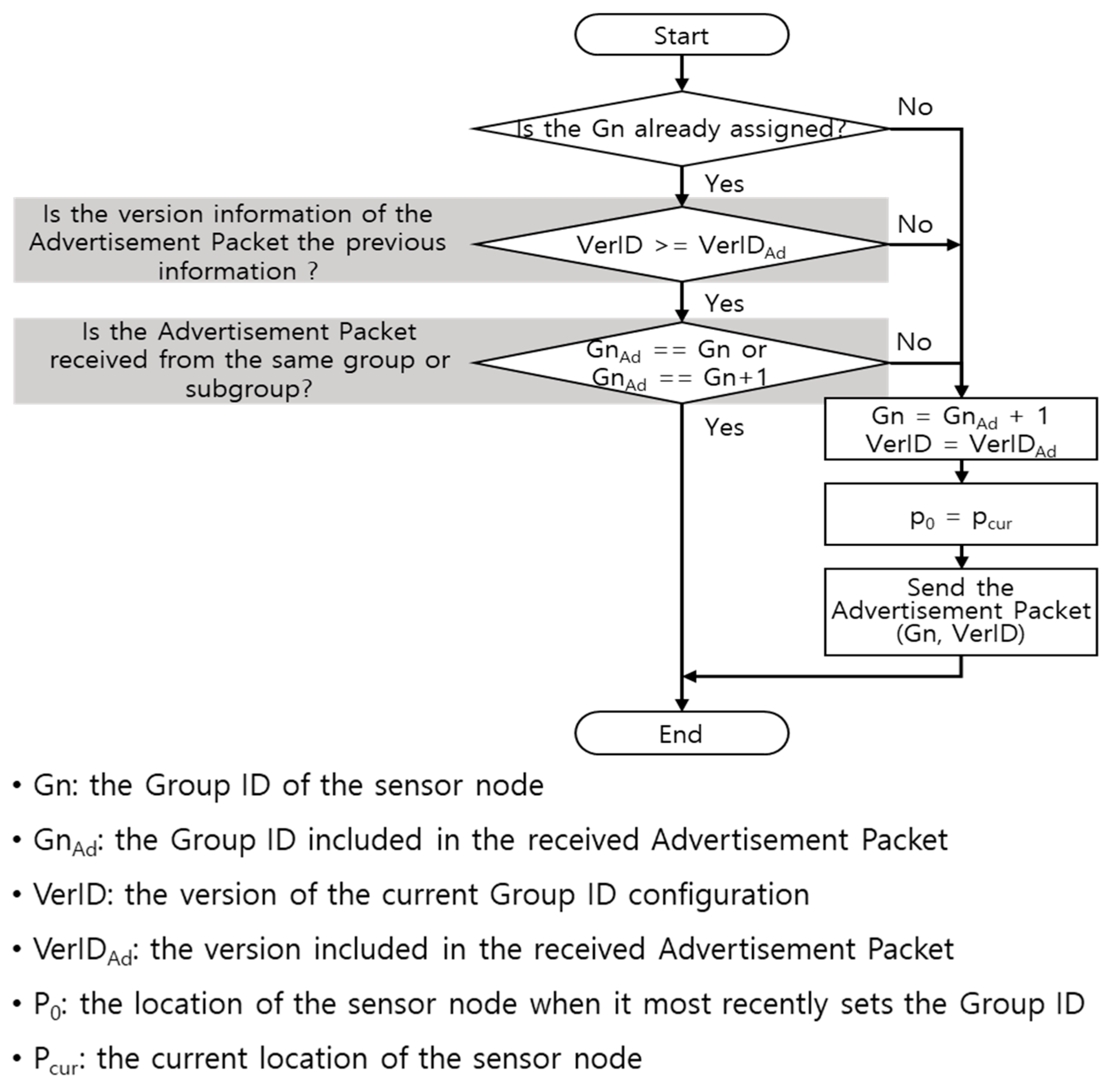
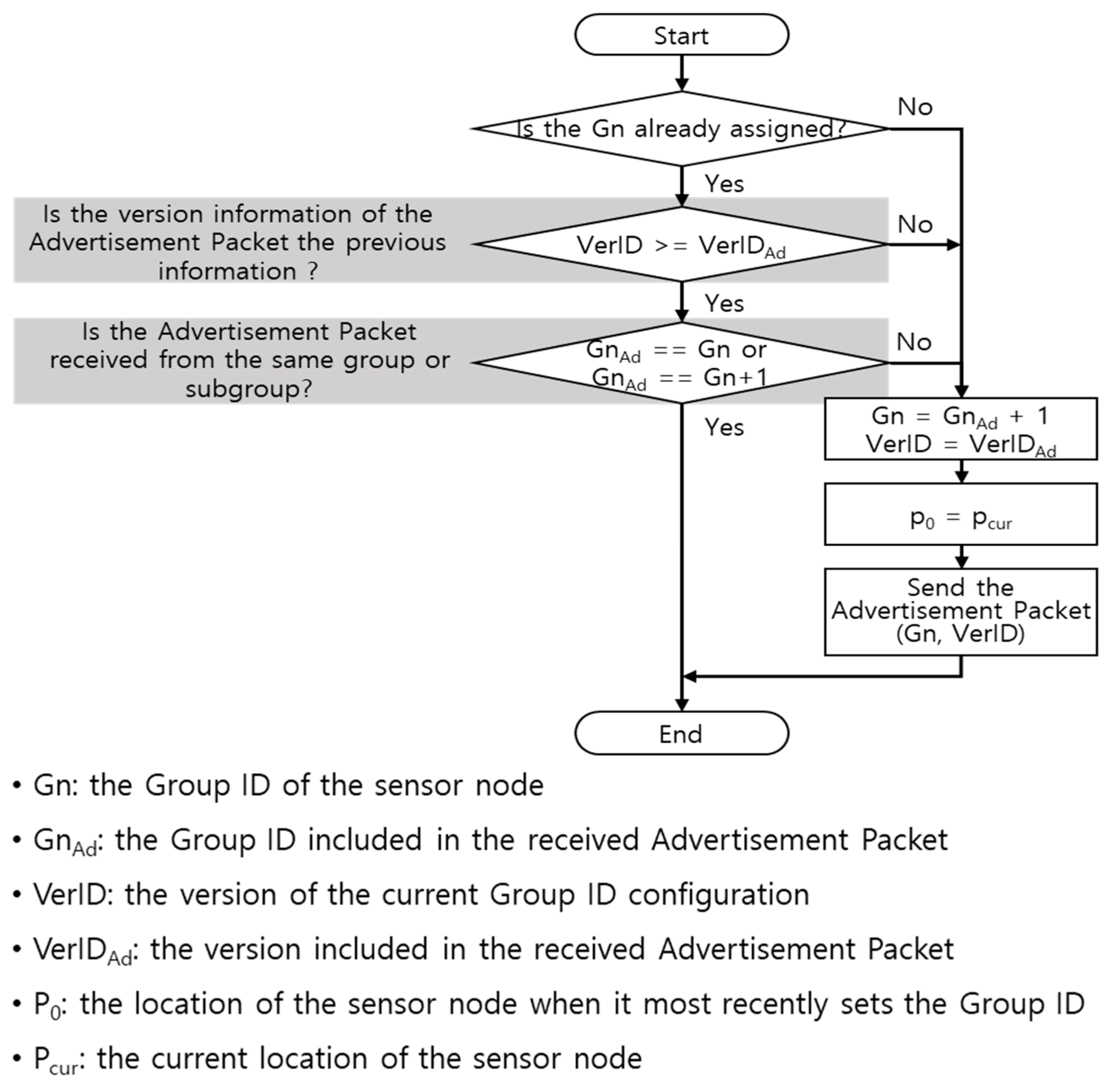
- (3)
- If a smart sensor node with a group ID already receives advertisement packets, it checks whether its own version of information is an update of the received group setting version information. If the received information is new, it adds 1 to the received group ID and sets the value as its group ID. Once the group setting version is renewed, an advertisement packet that includes these two sets of information is generated and transmitted to adjacent smart sensor nodes within the distance. The smart sensor node remembers its position in order to trace the track of its movement in the future.
- (4)
- Steps 2 to 3 are repeated until the group ID is set for each of the smart sensor nodes.
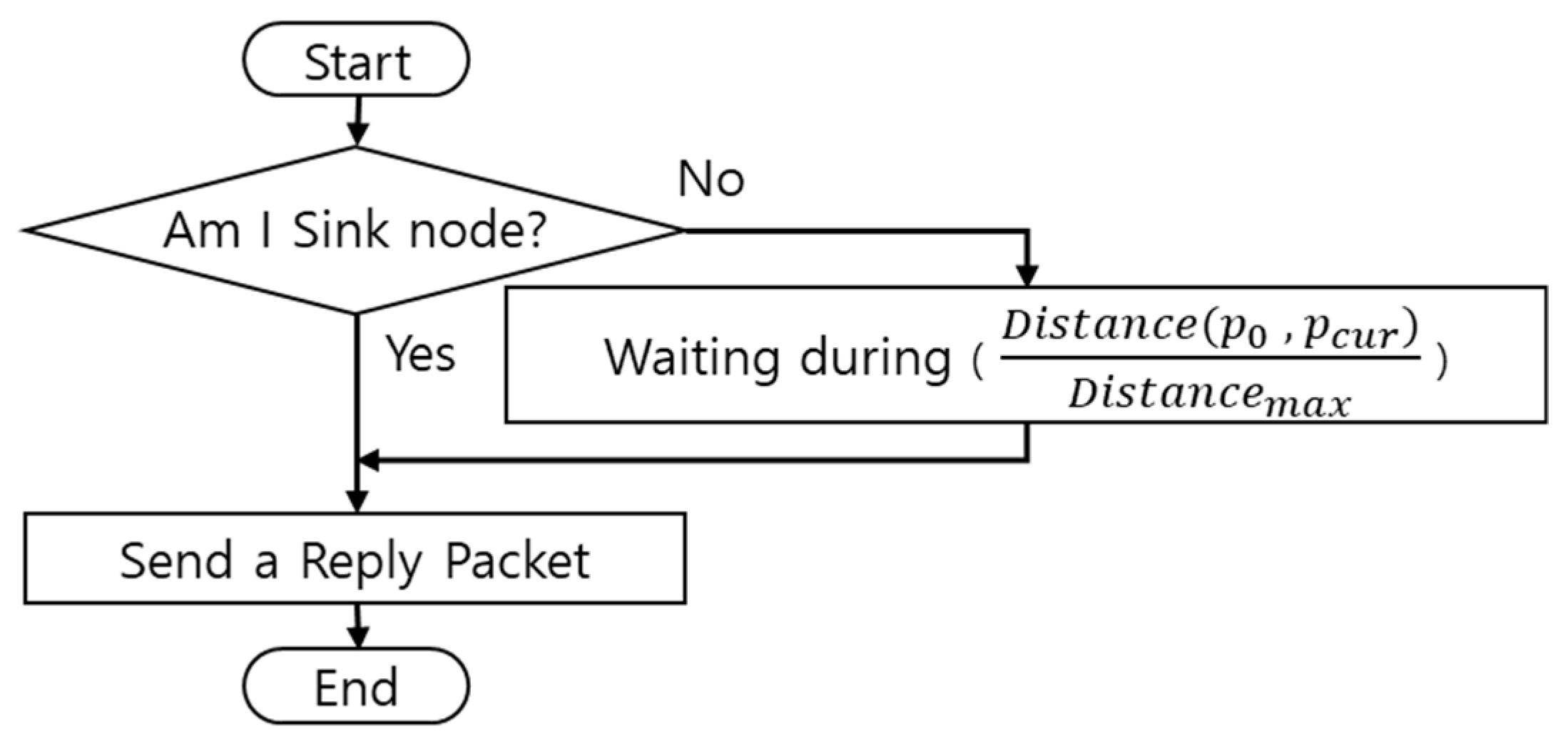
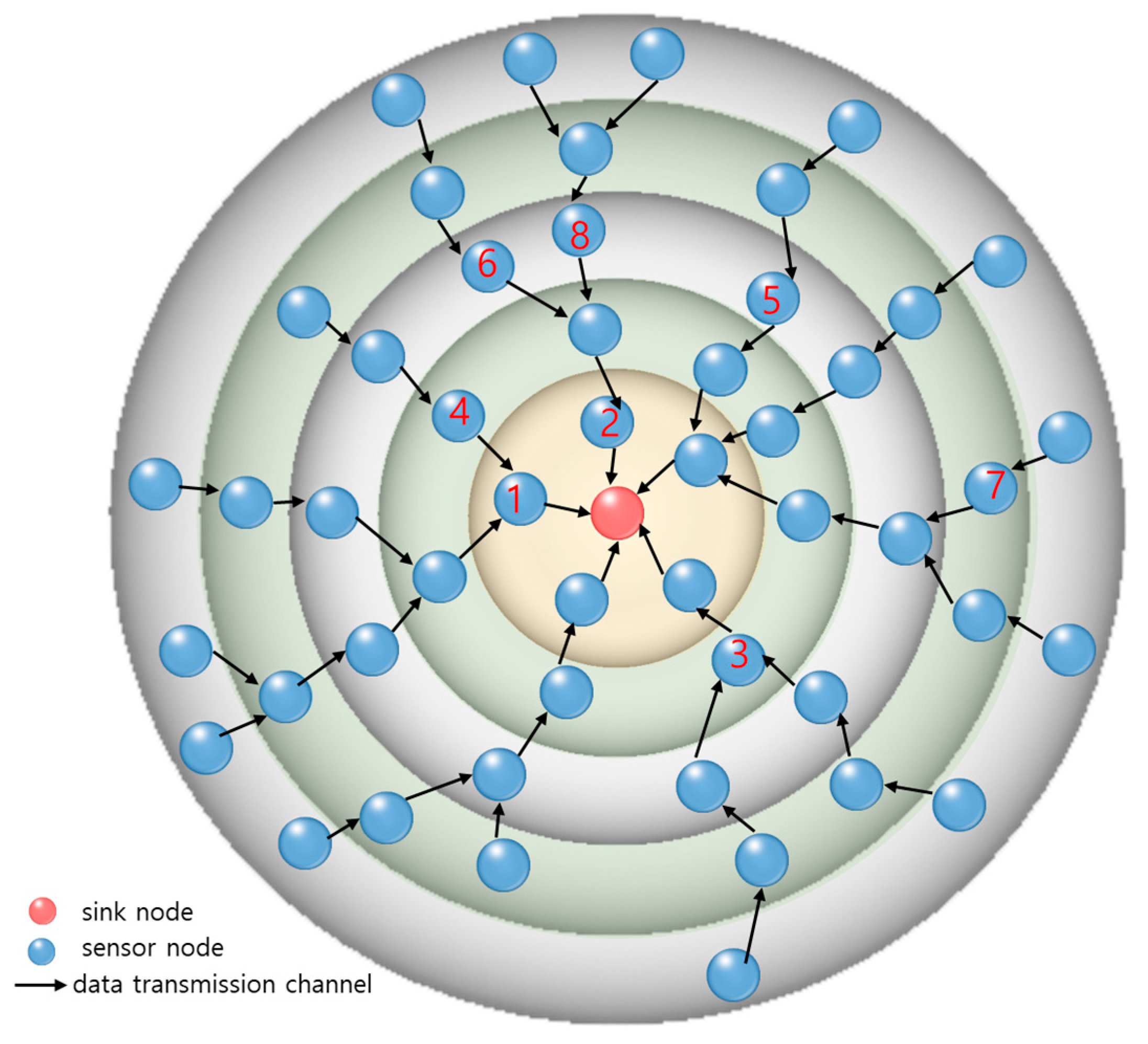
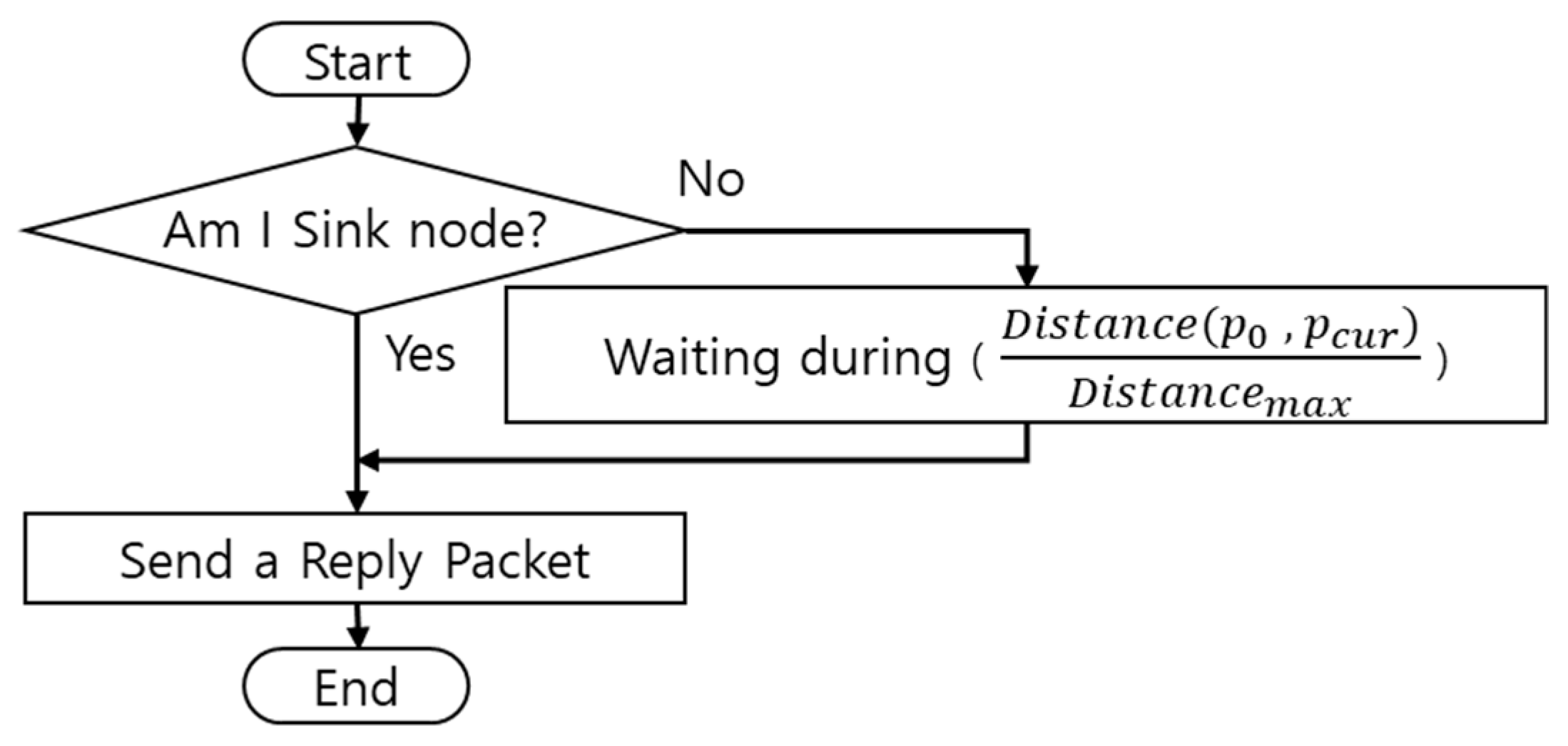
2.1.2. Data Transmission Channel
2.2. Support for Mobility of Smart Sensor Nodes
- (1)
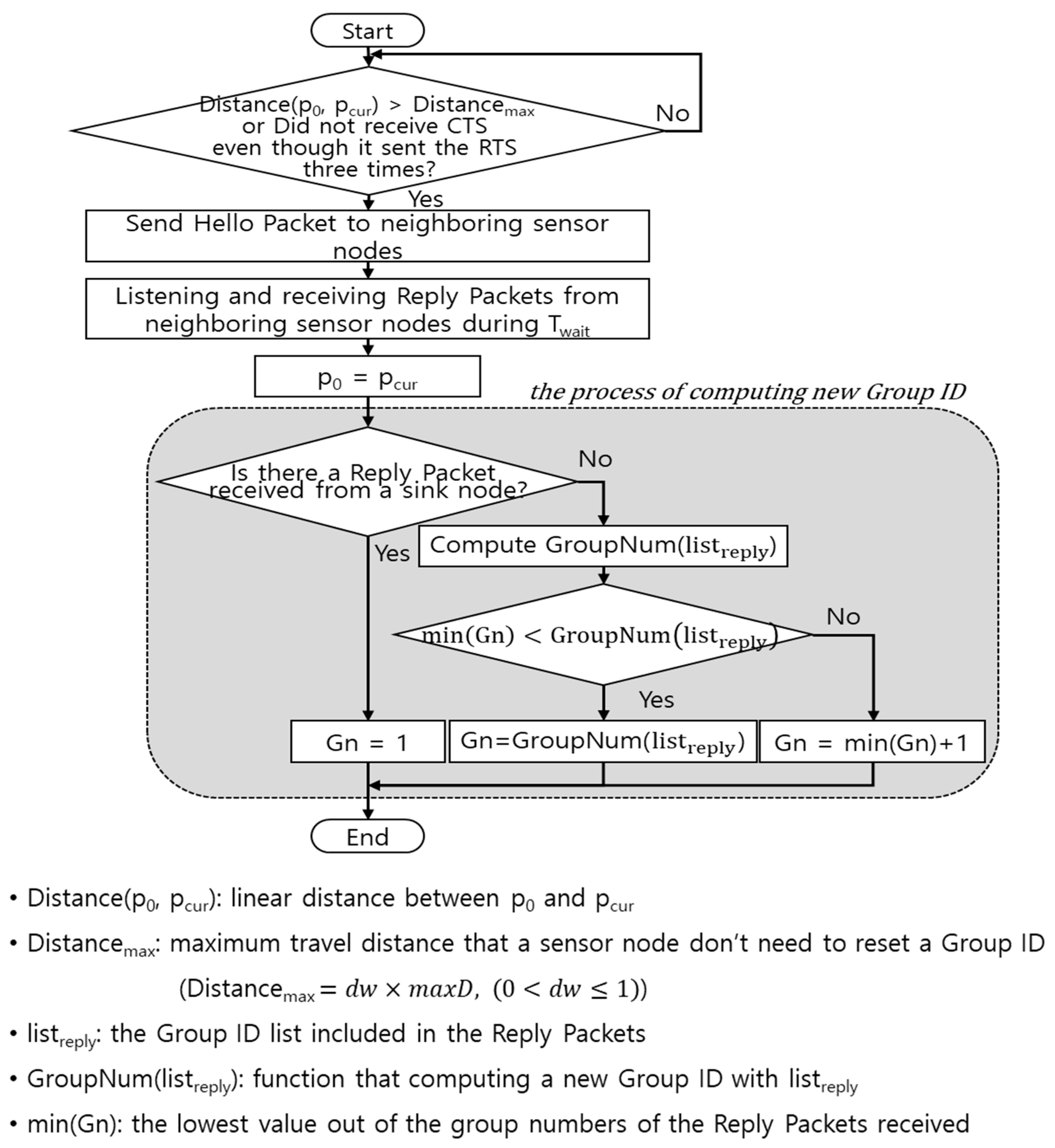
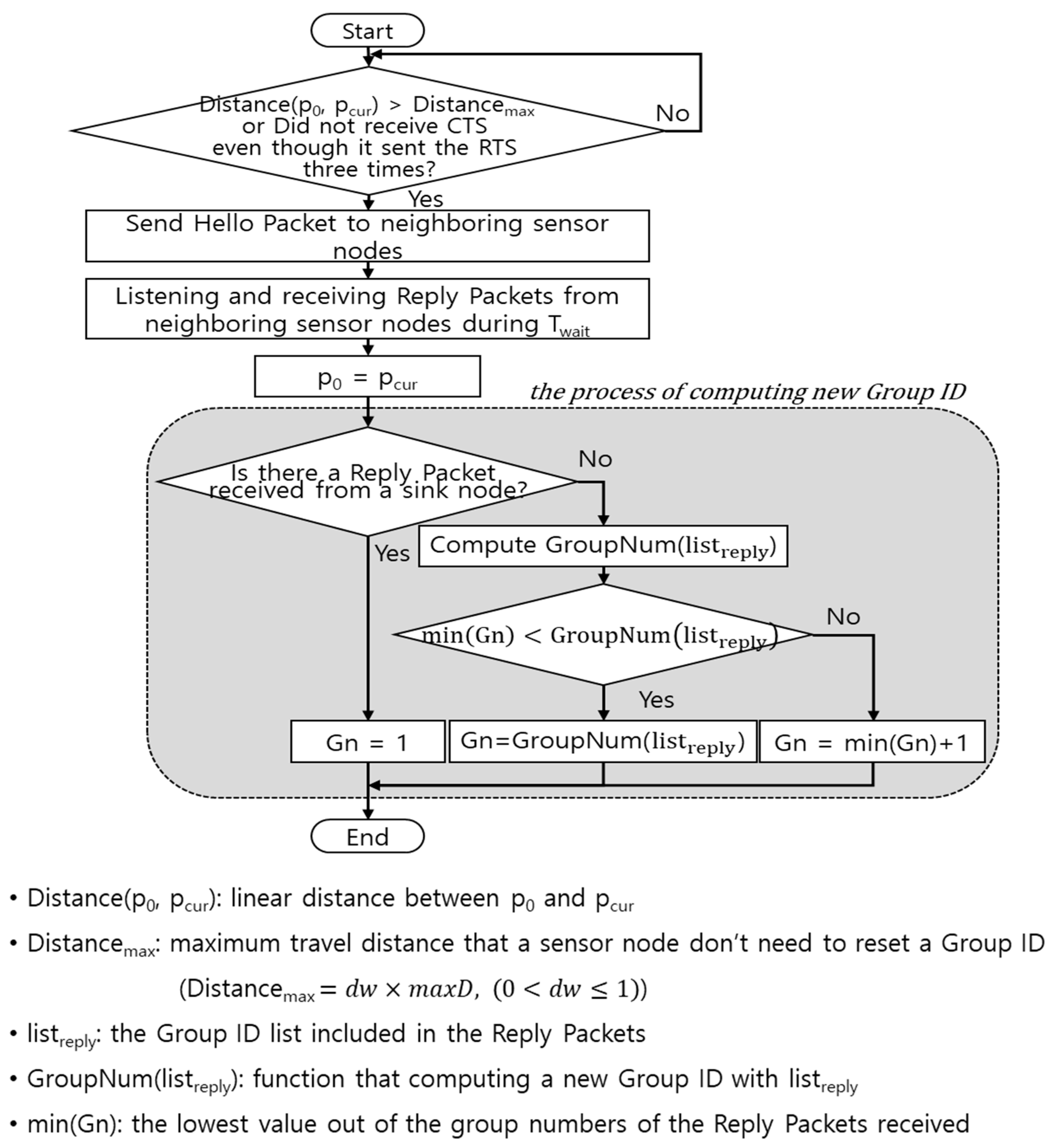
- When smart sensor nodes’ movement exceeds a certain distanceIn order to recognize when smart sensor nodes’ movement exceeds a certain distance, smart sensor nodes calculate the travel distance regularly in reference to its location data. As for the travel distance, the lineal distance from the position where each smart sensor node set its latest group ID to its current position is calculated. The “d” for the judgment that smart sensor nodes’ movement exceeds a certain distance may be illustrated with Formula (1) below:
- maxD: the maximum distance that sensor nodes can communicate with
Here, the maximum value of “d” indicates the maximum value of the distance in which smart sensor nodes can communicate with other nodes, and it may be varied depending on the weight “dw”. As the value of dw is close to 0, the procedure of group ID resetting is initiated when the smart sensor node moves regardless of the distance. Since the value of dw is close to 1, the group ID is reset only when the smart sensor node moves to a large degree. If the group ID is reset frequently, the overhead increases accordingly while the probability of data failure in smart sensor node movement decreases. If the group ID is reset only when the smart sensor node moves to a large degree, the overhead decreases but the time of data transmission failure upon smart sensor node movement is prolonged. As a result, the probability of data transfer delay increases. Therefore, the weight “dw” may be set differently by the system developer depending on the system to which smart sensor nodes are applied. - (2)
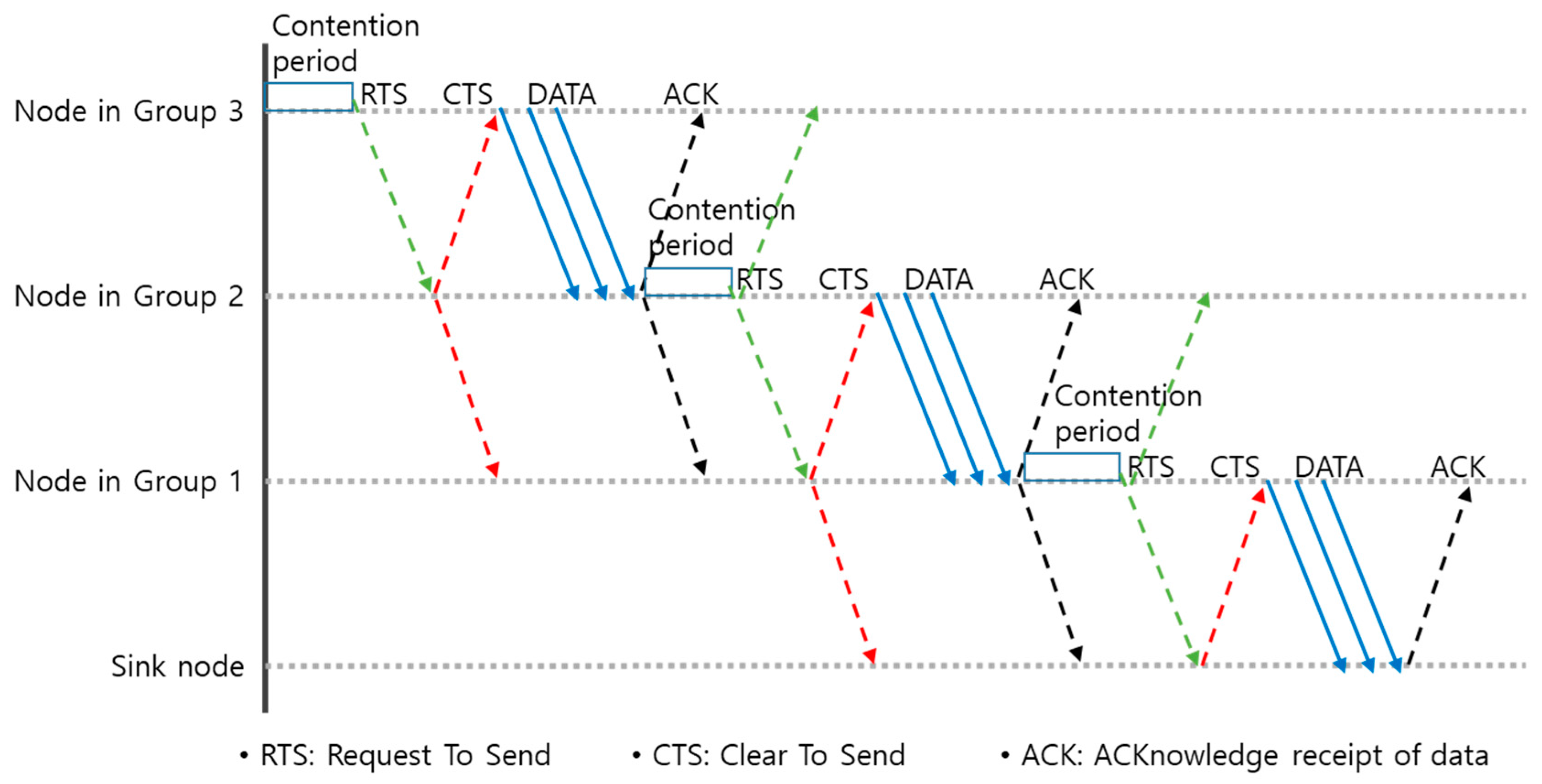
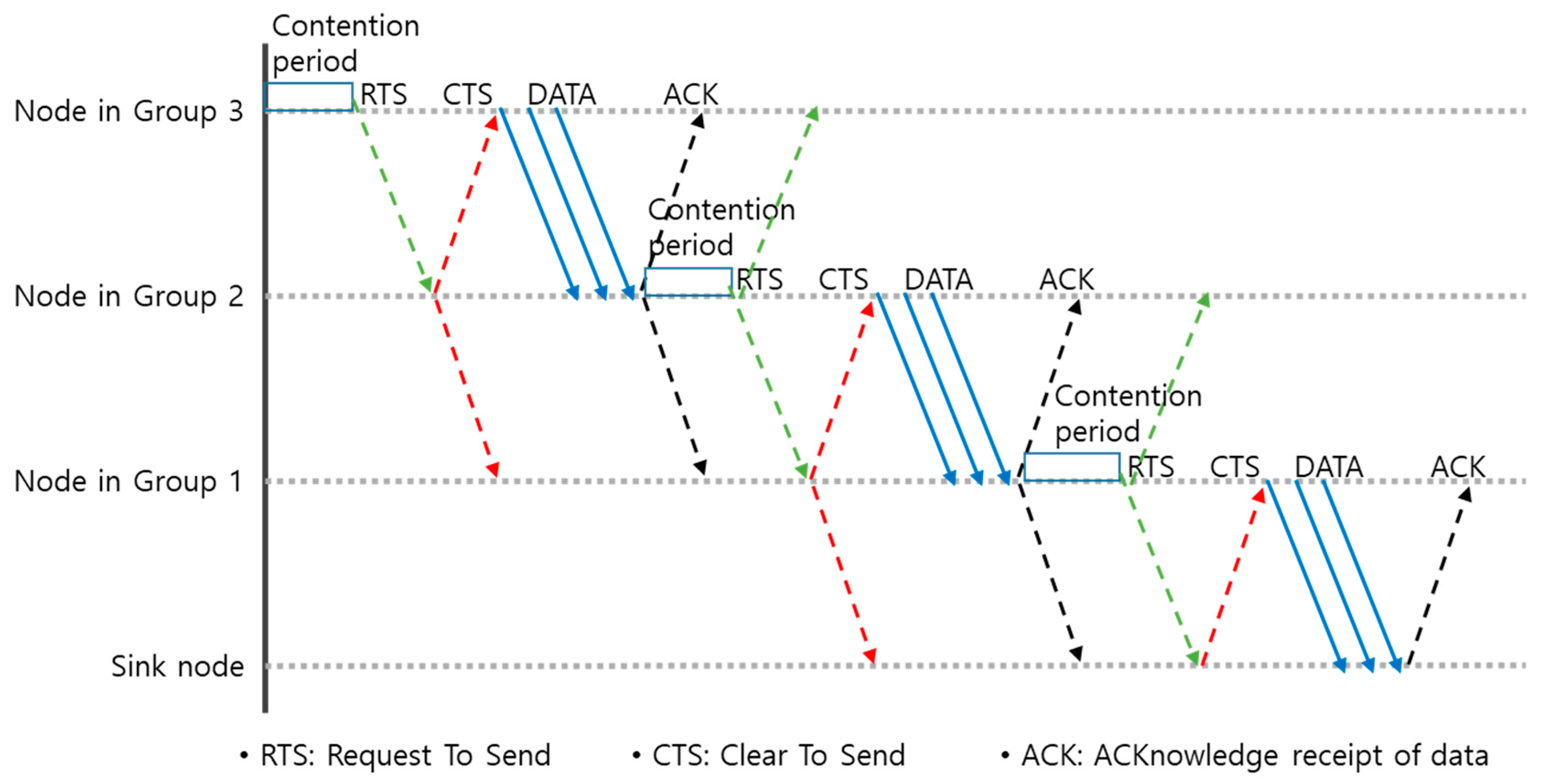
- Smart sensor node recognizing that it is unable to send data to the smart sensor node of the upper-level groupWhen smart sensor node sends Request To Send (RTS) three times to send data to the smart sensor node of the upper-level group but fails to receive Clear To Send (CTS), smart sensor node judges that it is no longer able to send data to the smart sensor node of upper-level group.
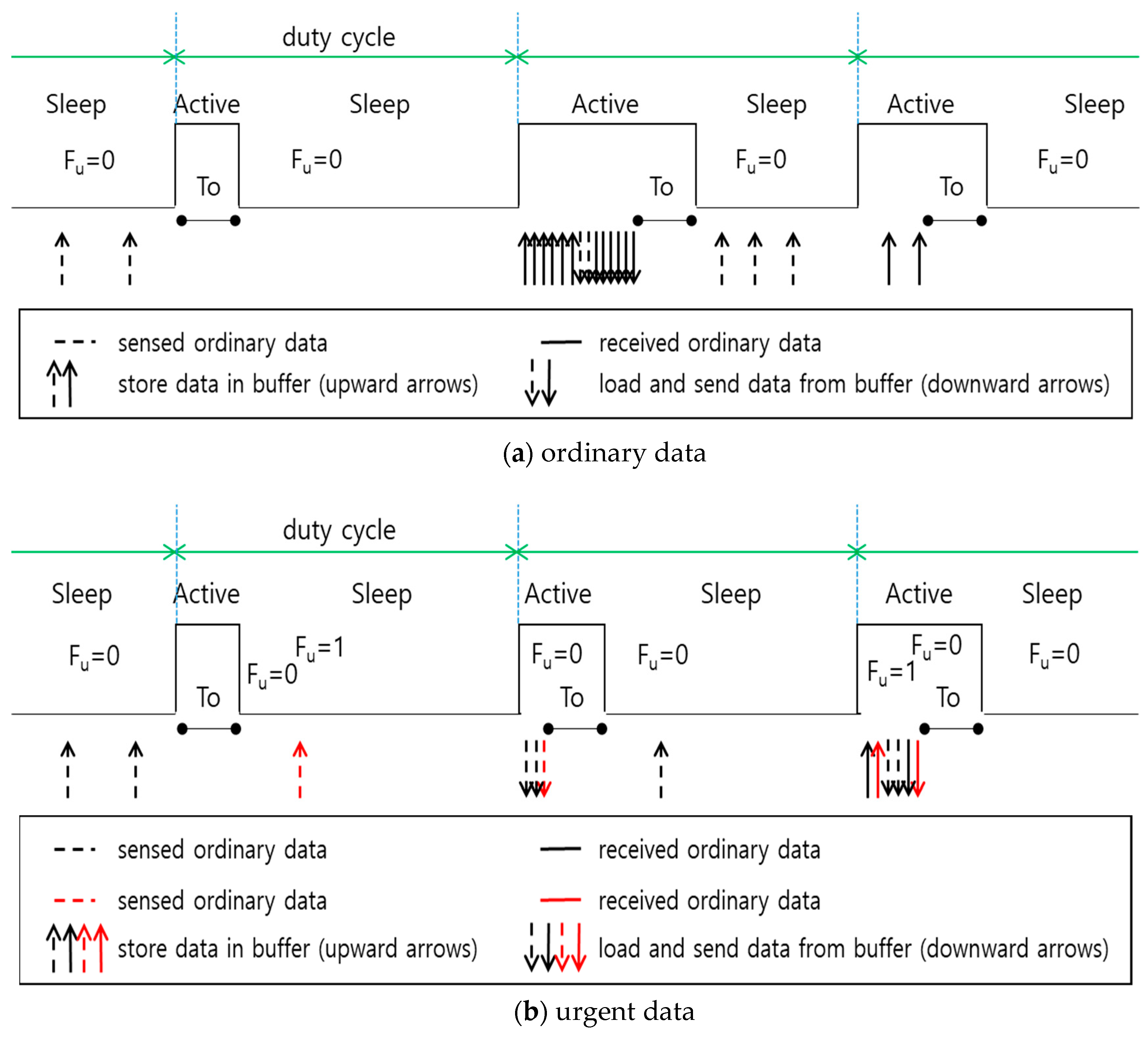
2.3. Buffer Threshold Setting
2.4. Urgent Data Transmission
3. Results
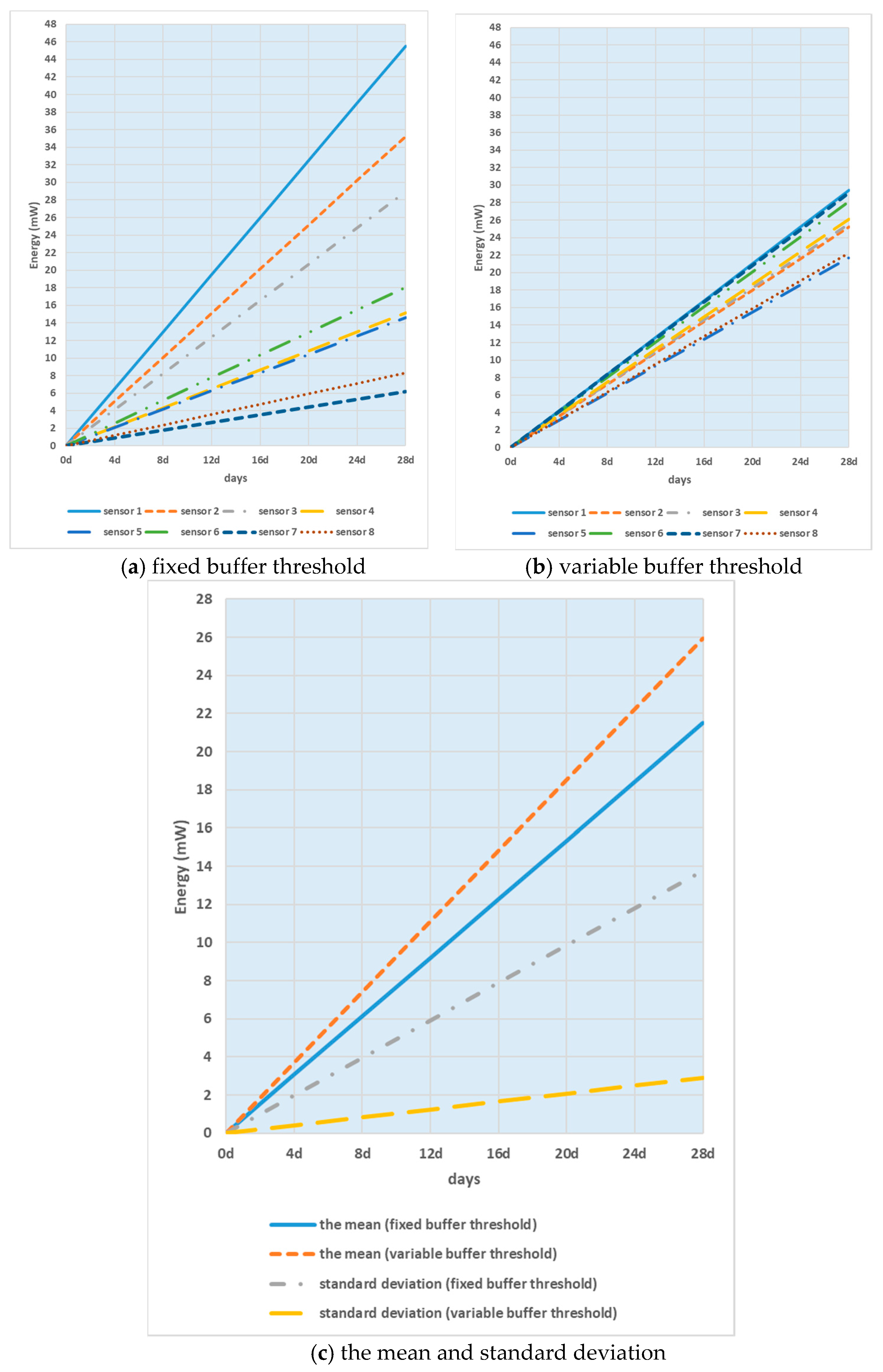
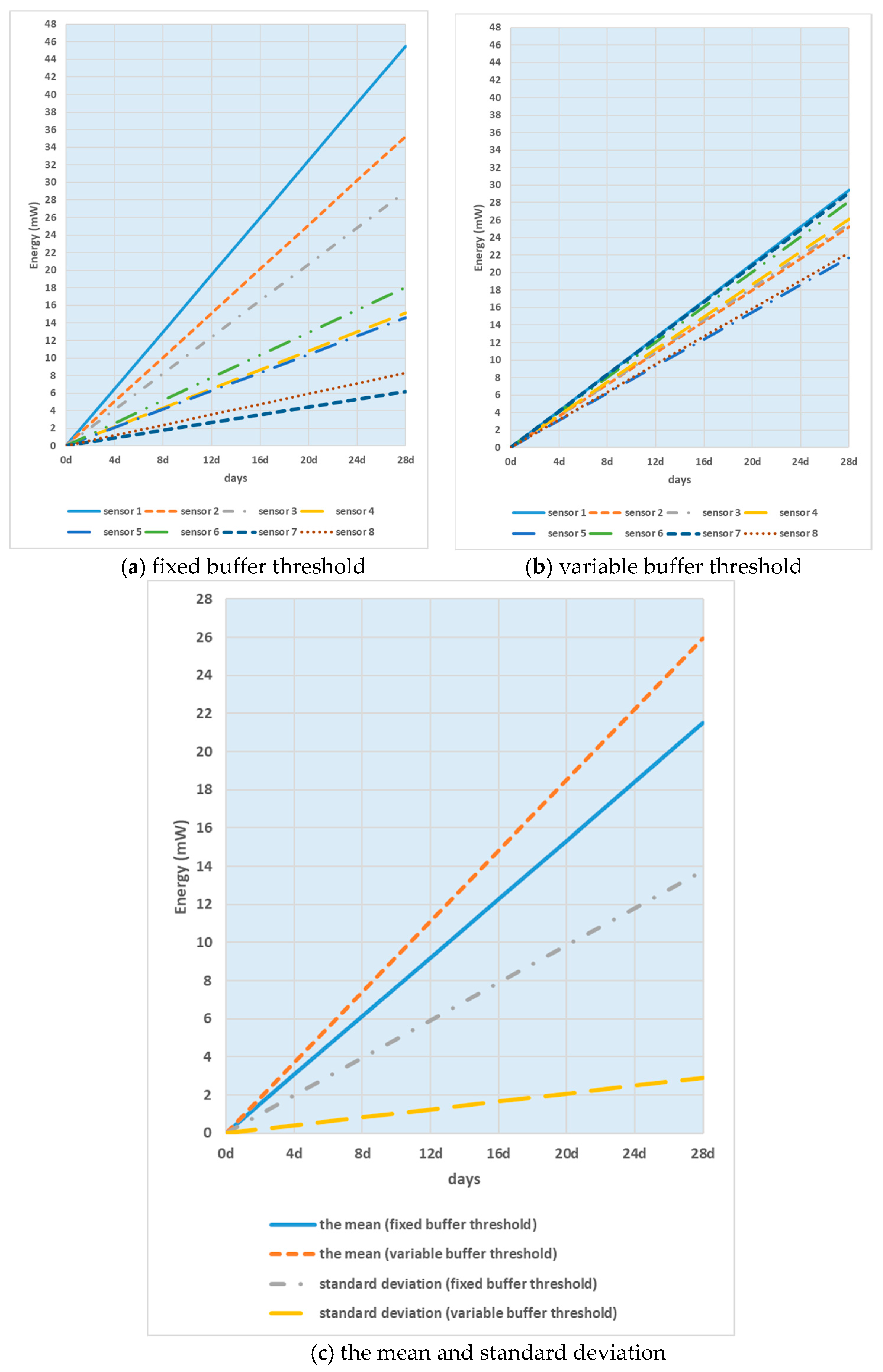
3.1. Comparison of Smart Sensor Node Energy Consumption Depending on the Buffer Threshold
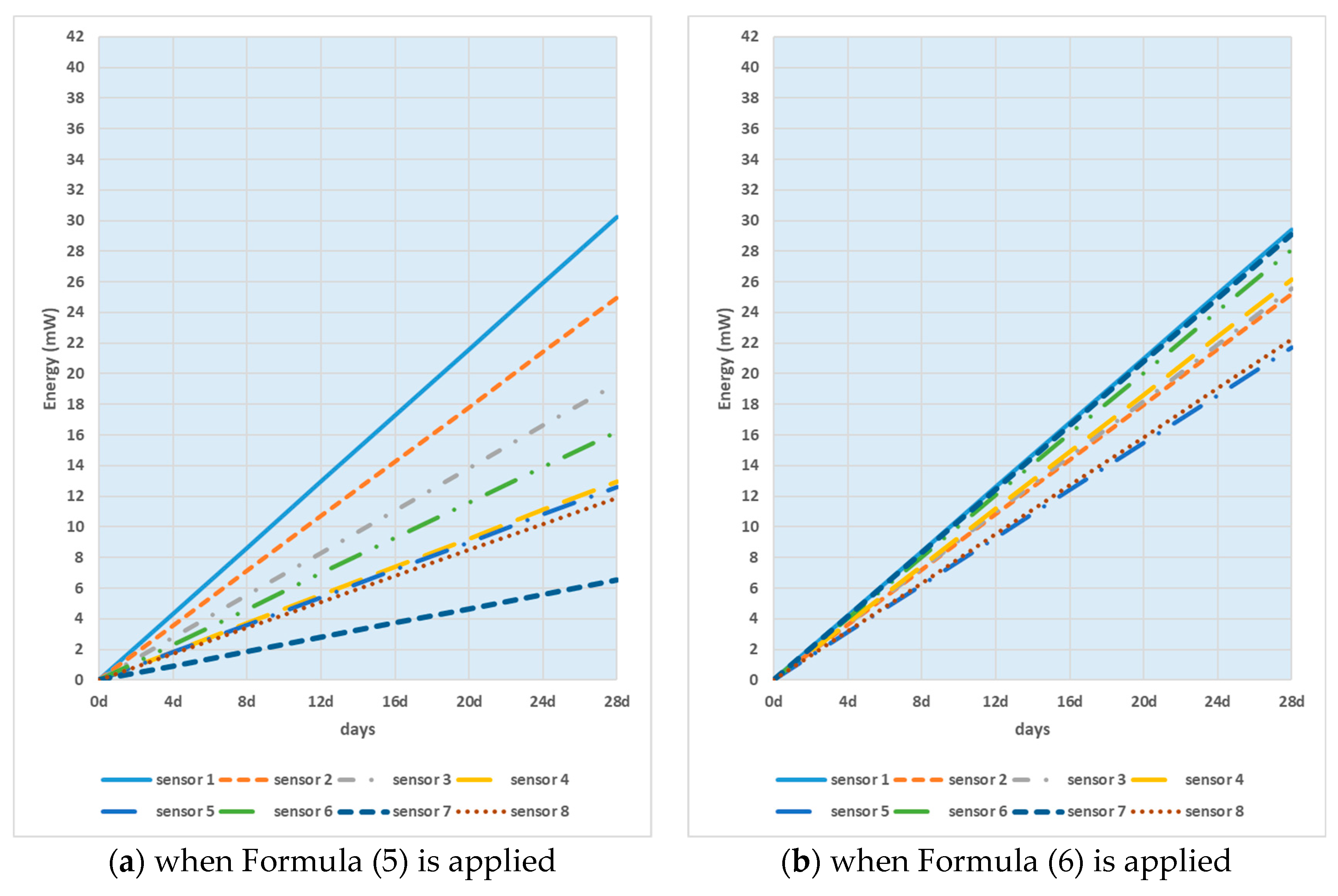
3.1.1. Comparison of the Fixed Buffer Threshold and Variable Buffer Threshold
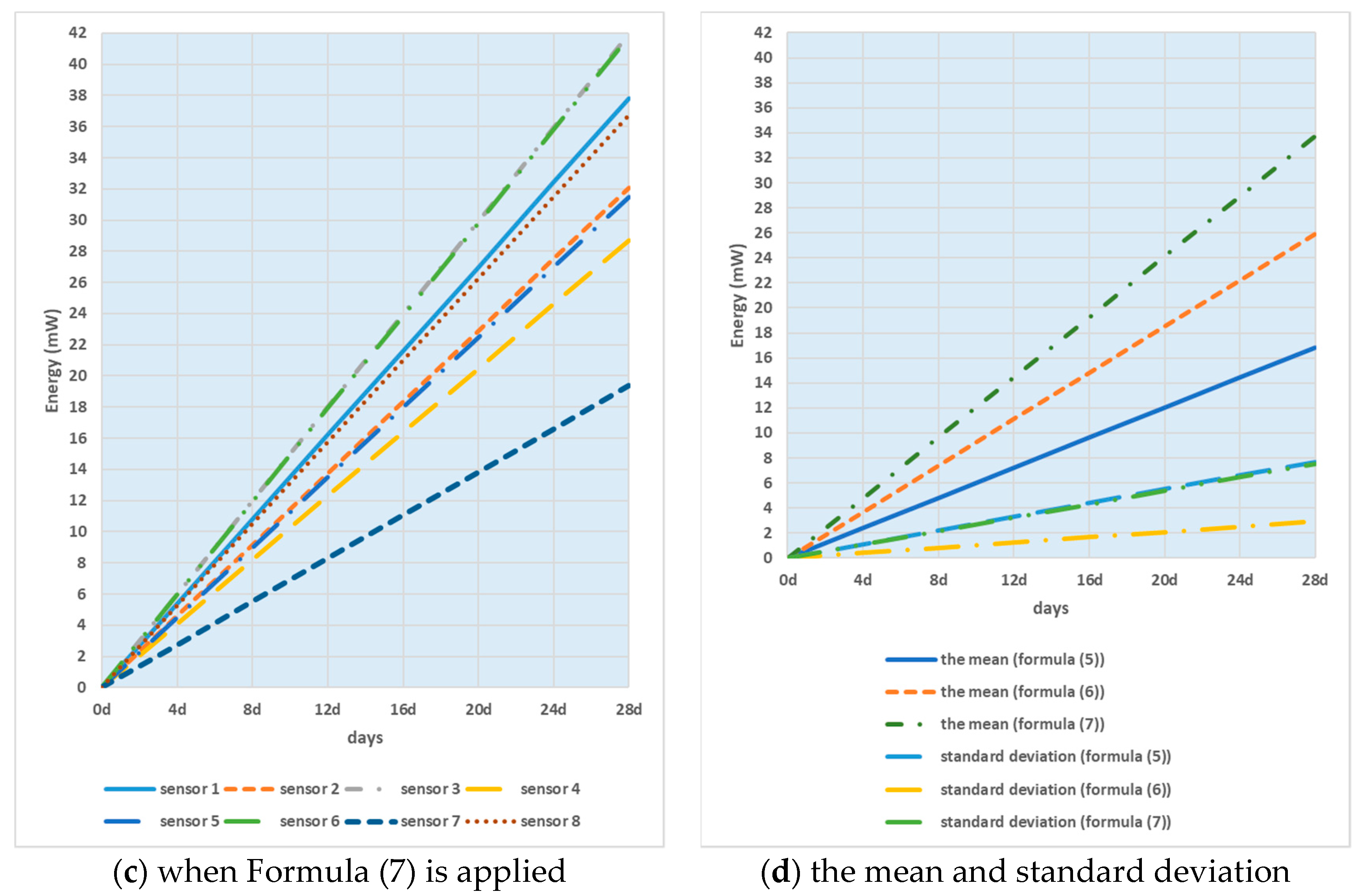
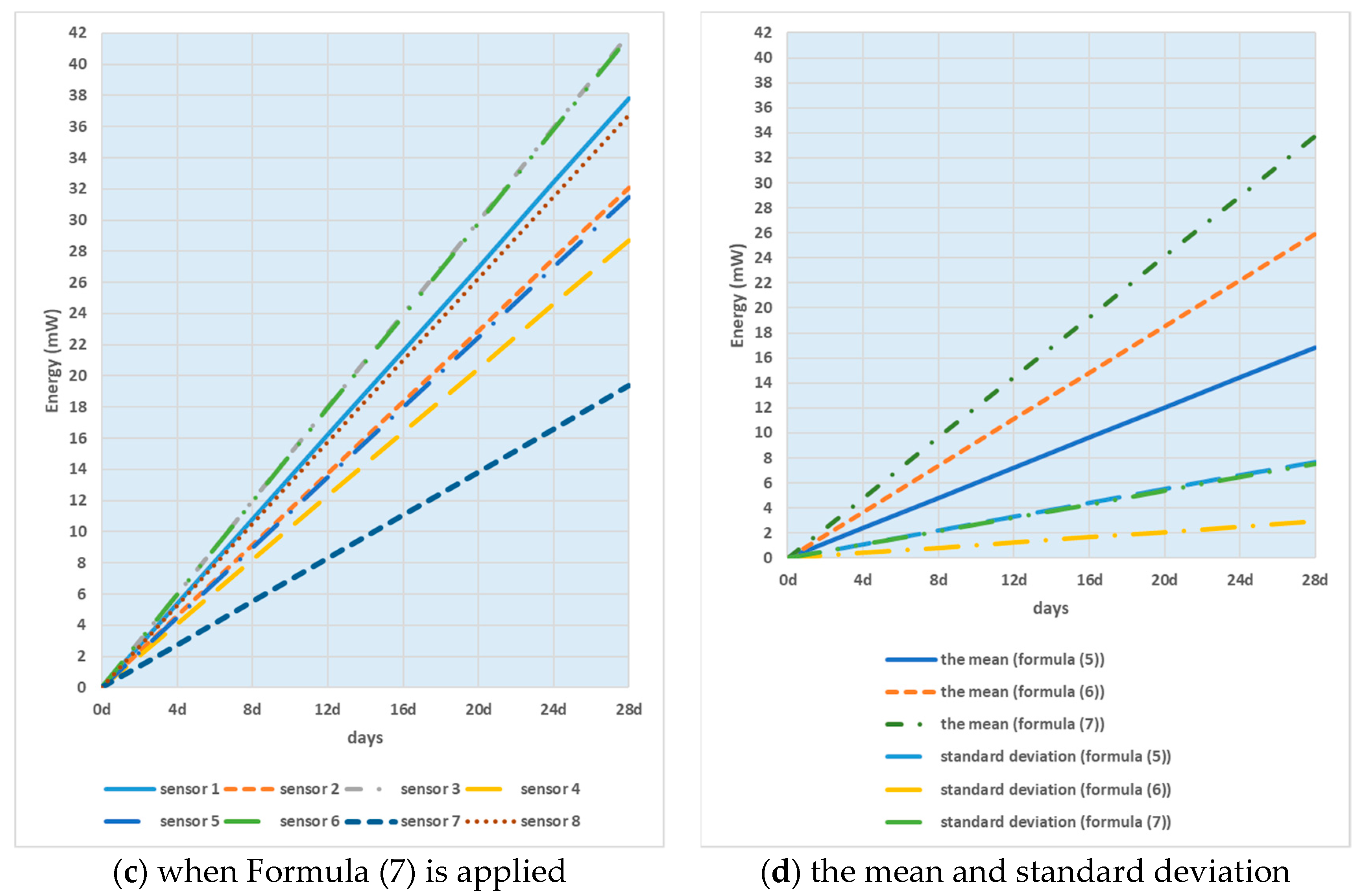
3.1.2. Comparison of Different Variable Buffer Thresholds
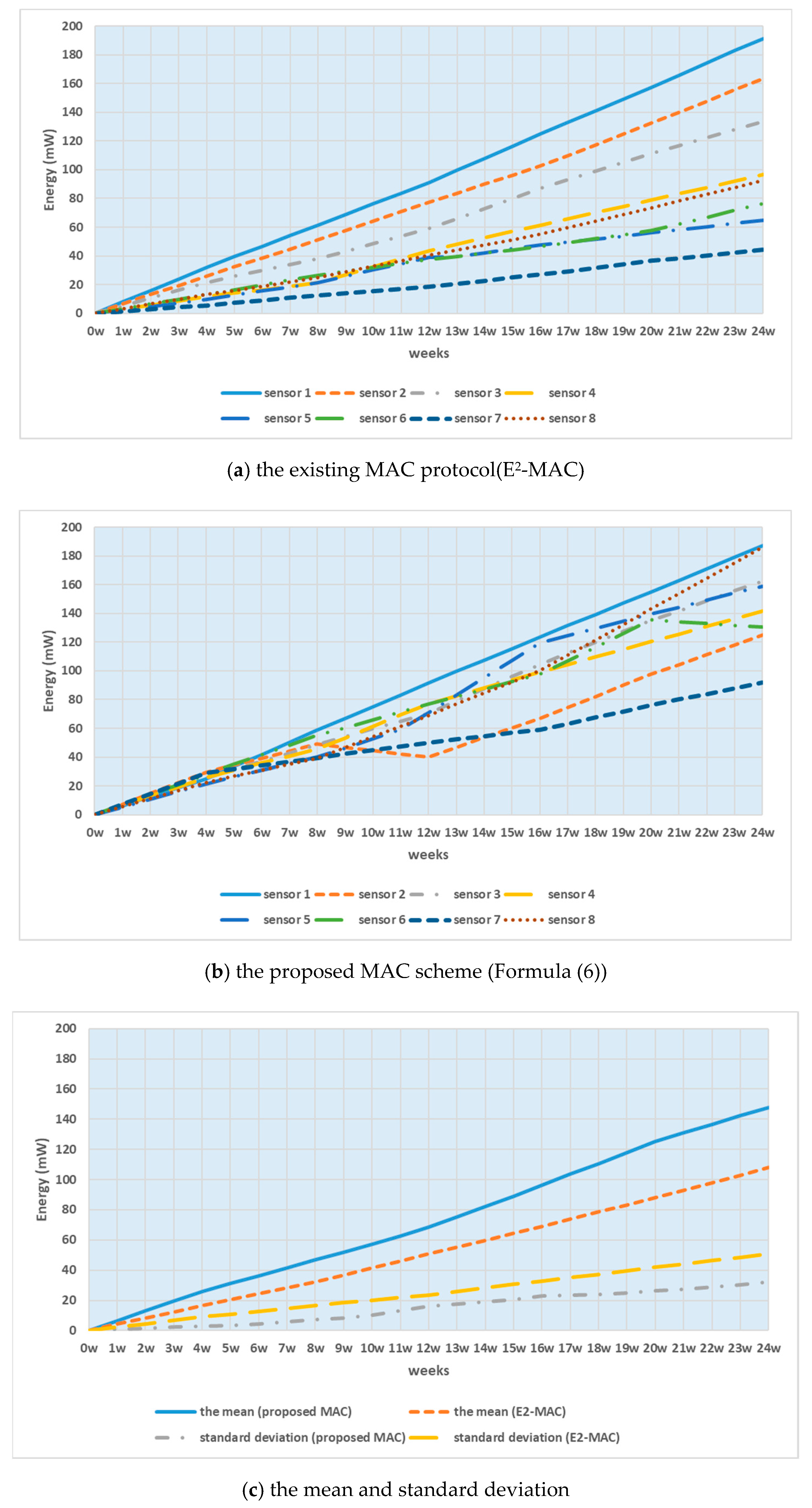
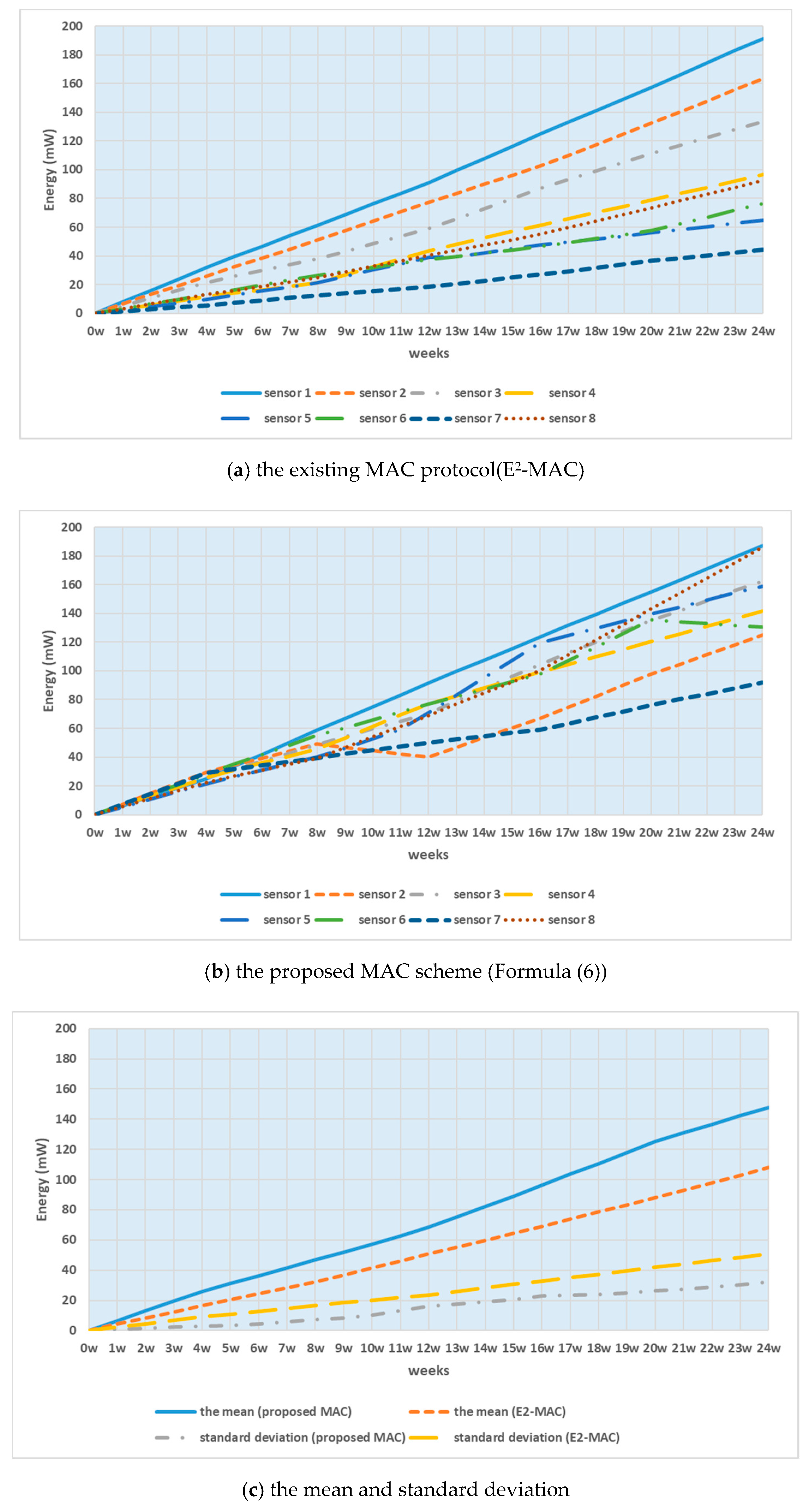
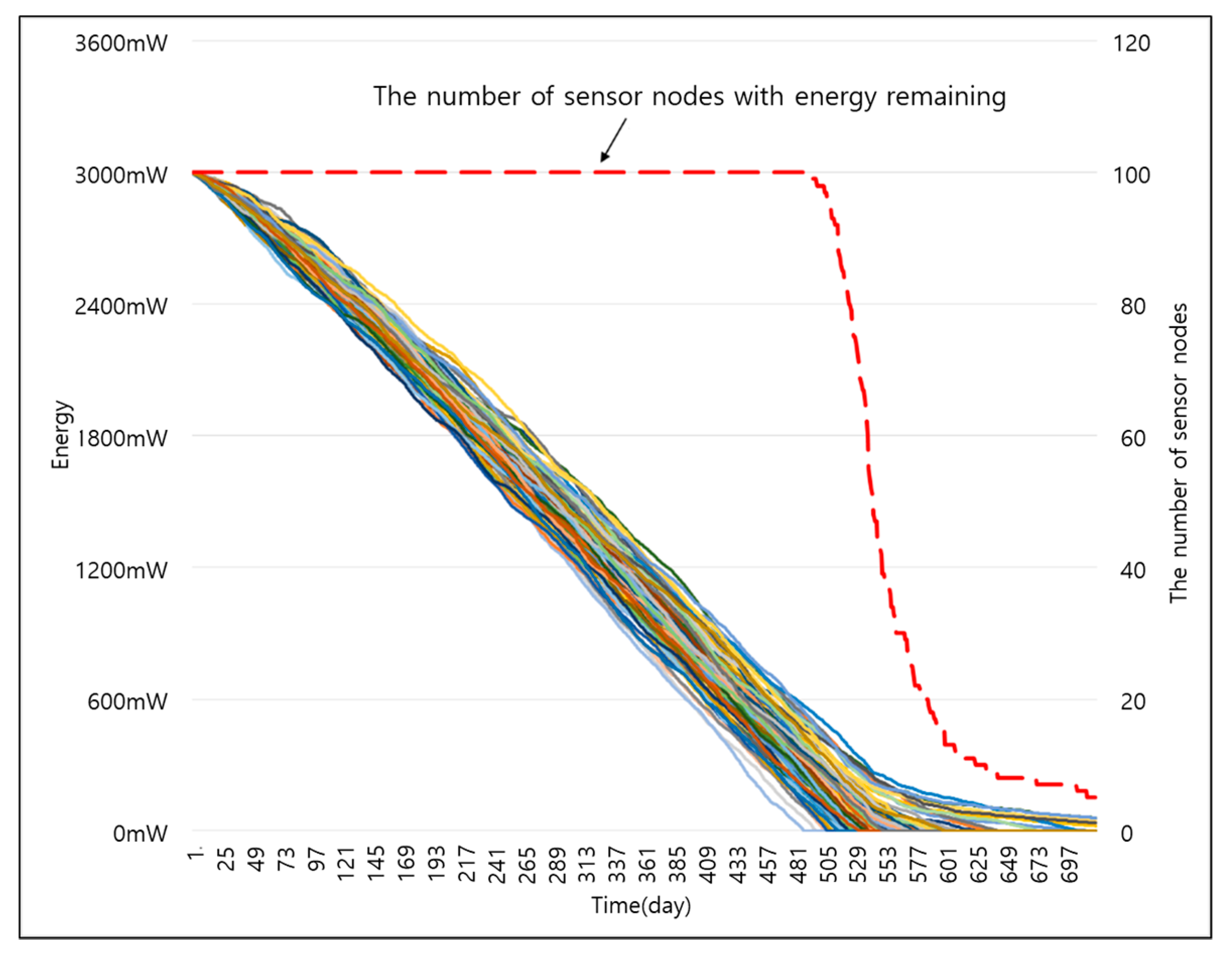
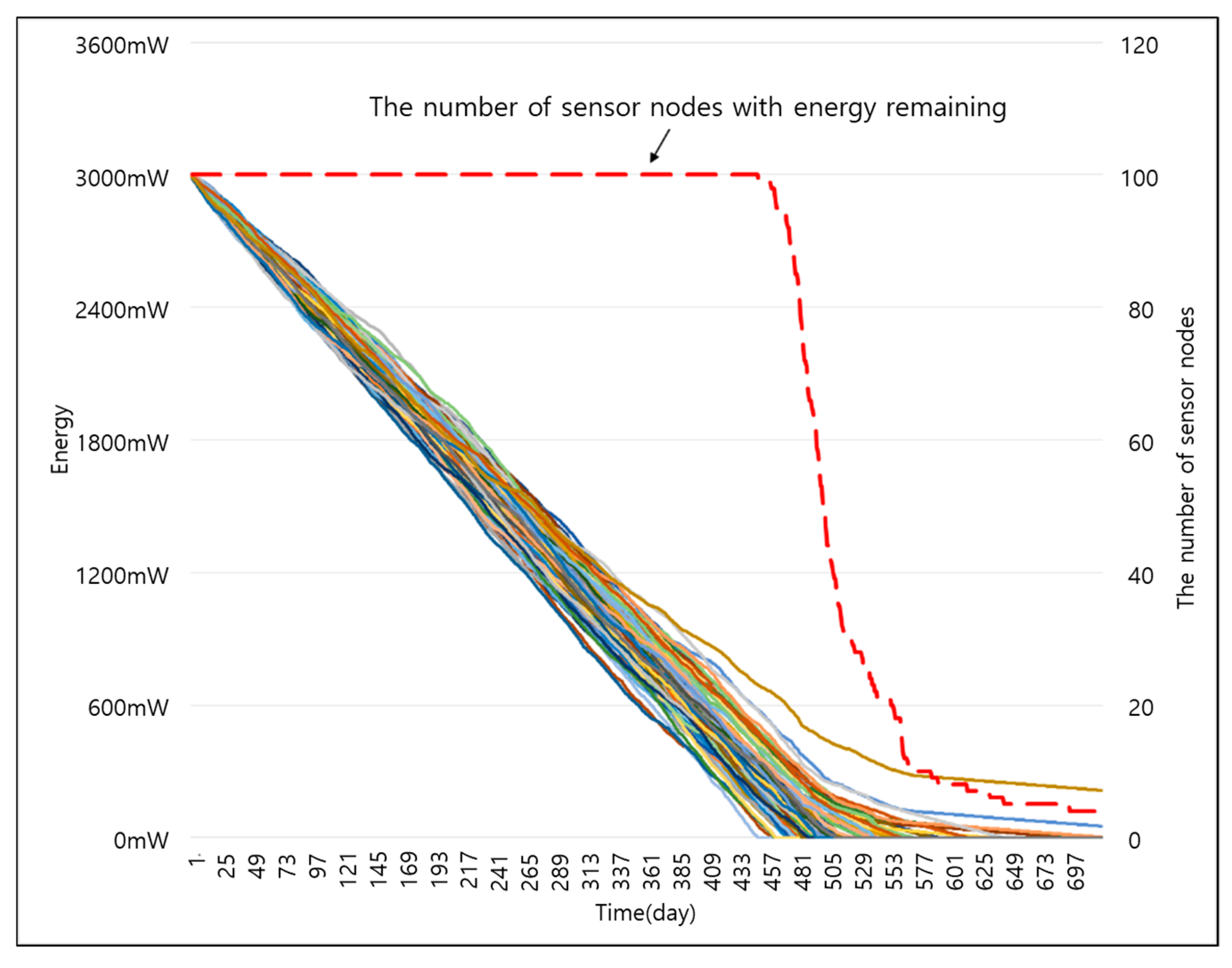
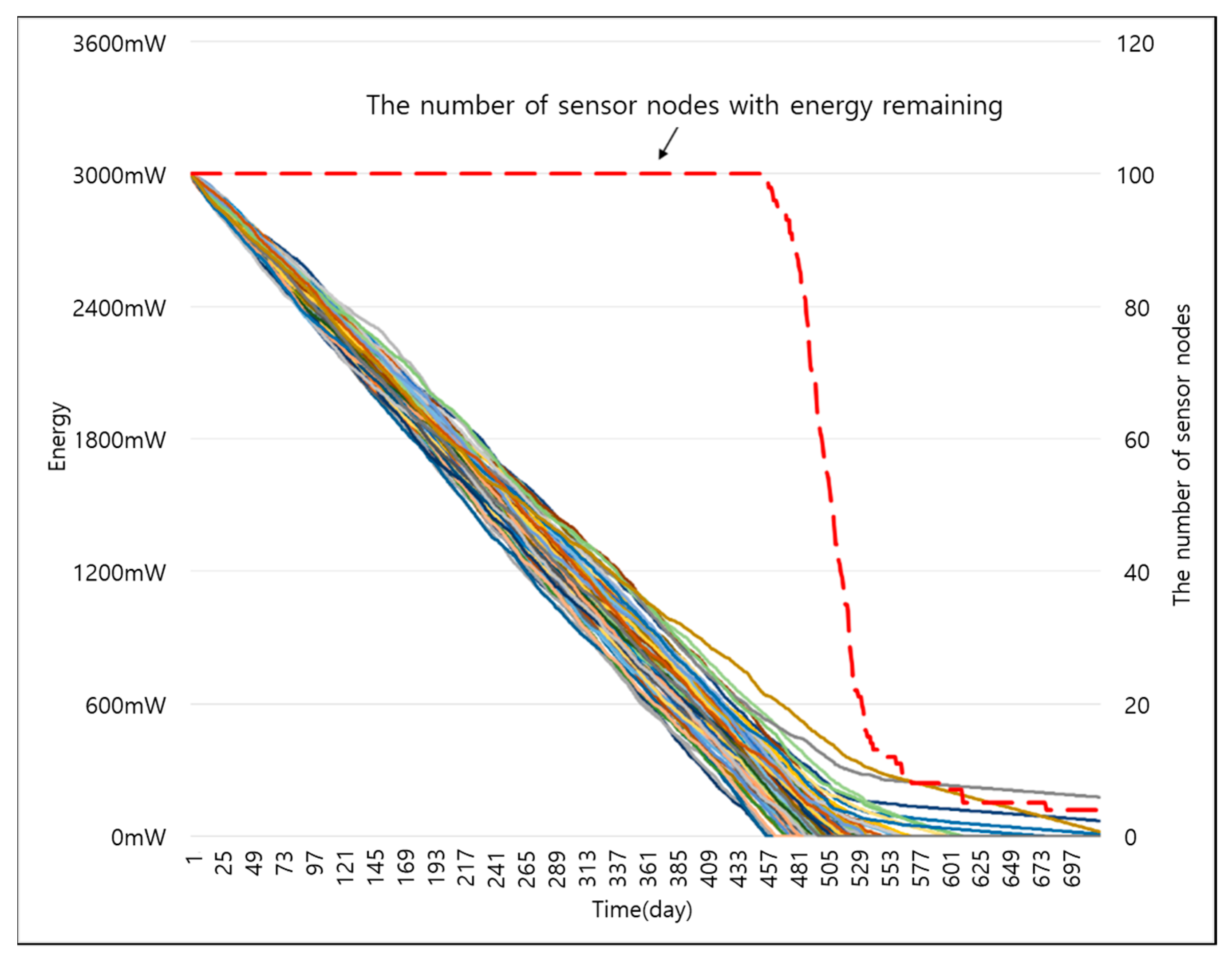
3.1.3. Comparison of the Existing MAC Protocol That Applies Fixed Buffer Thresholds and the Proposed MAC Protocol
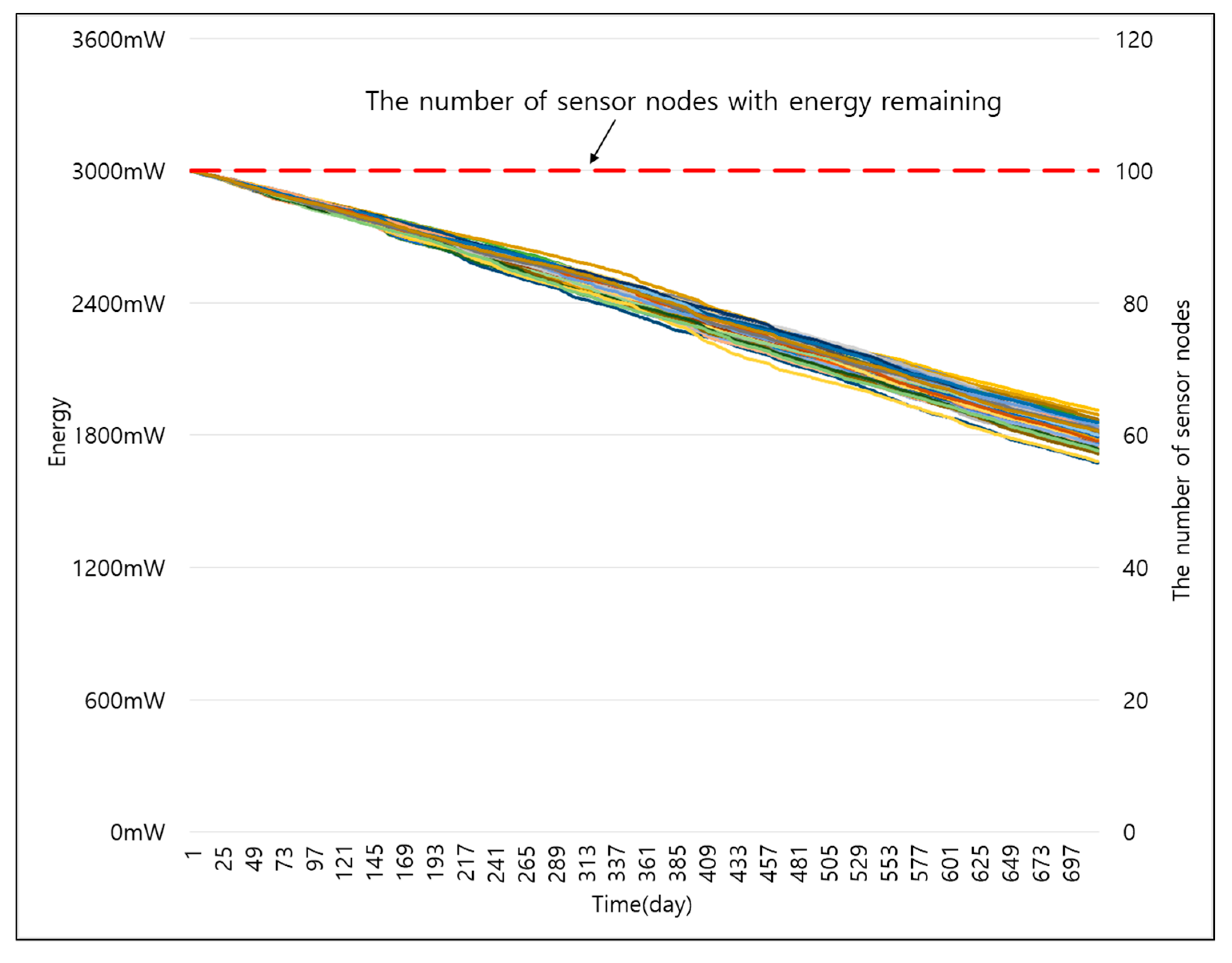
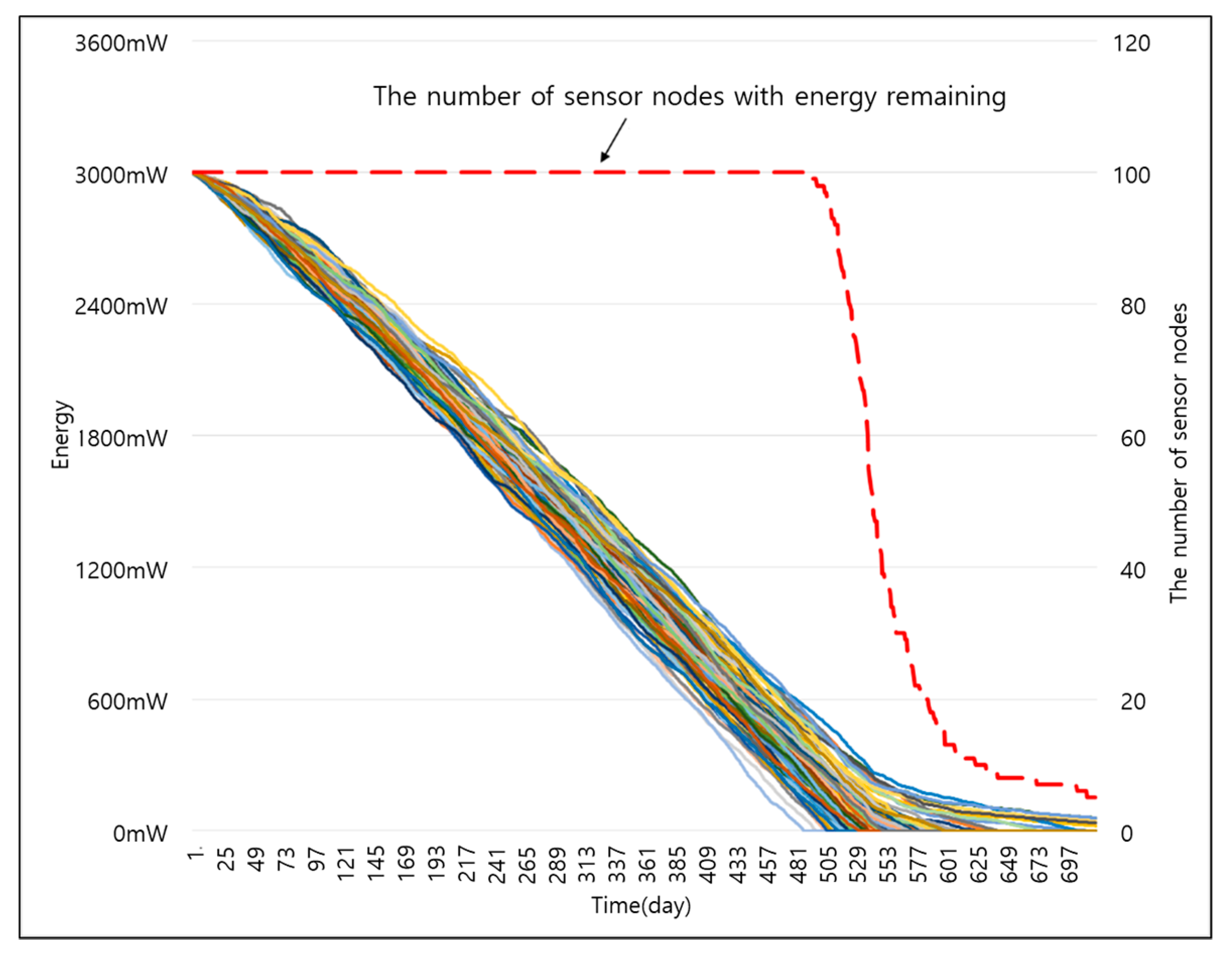
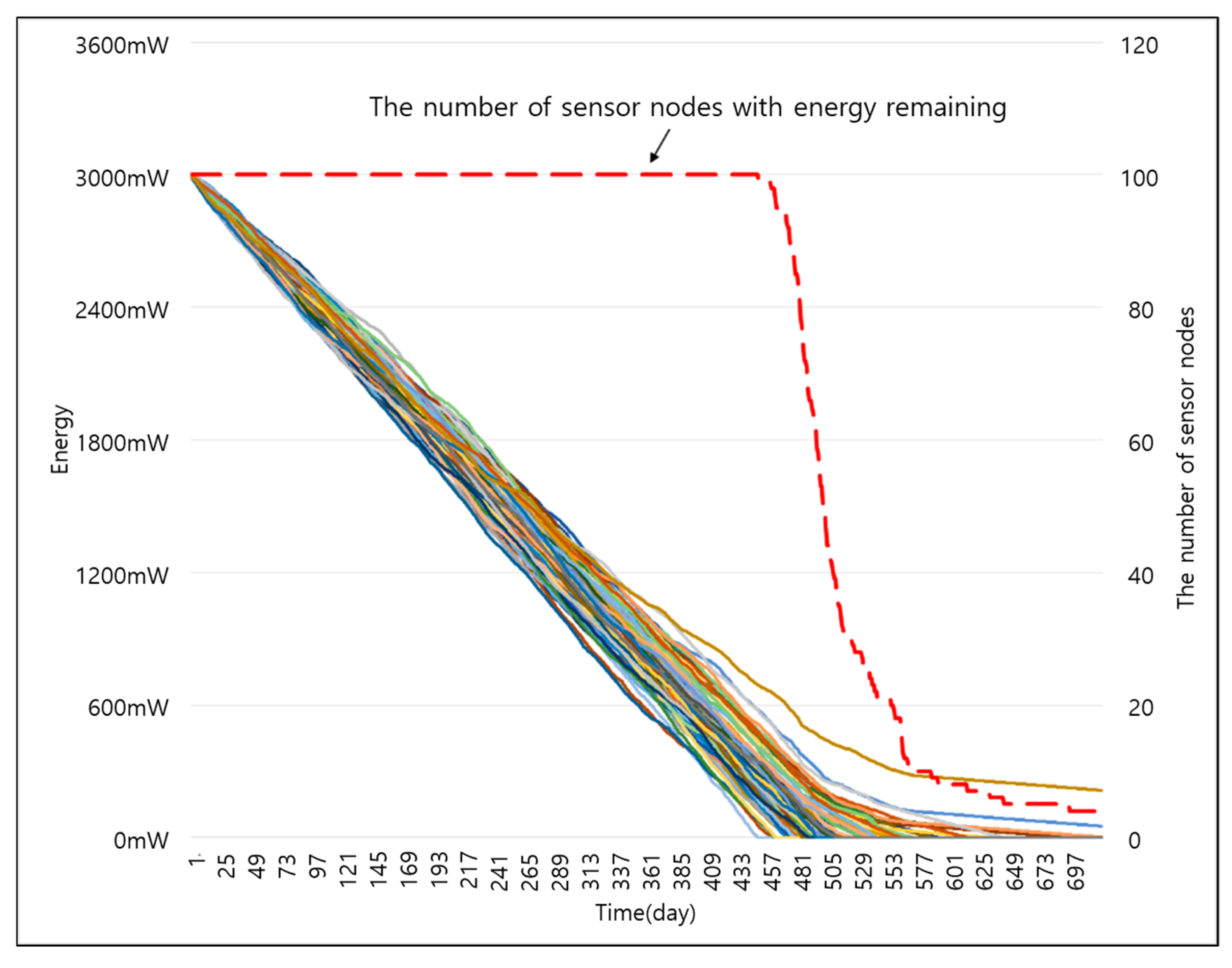
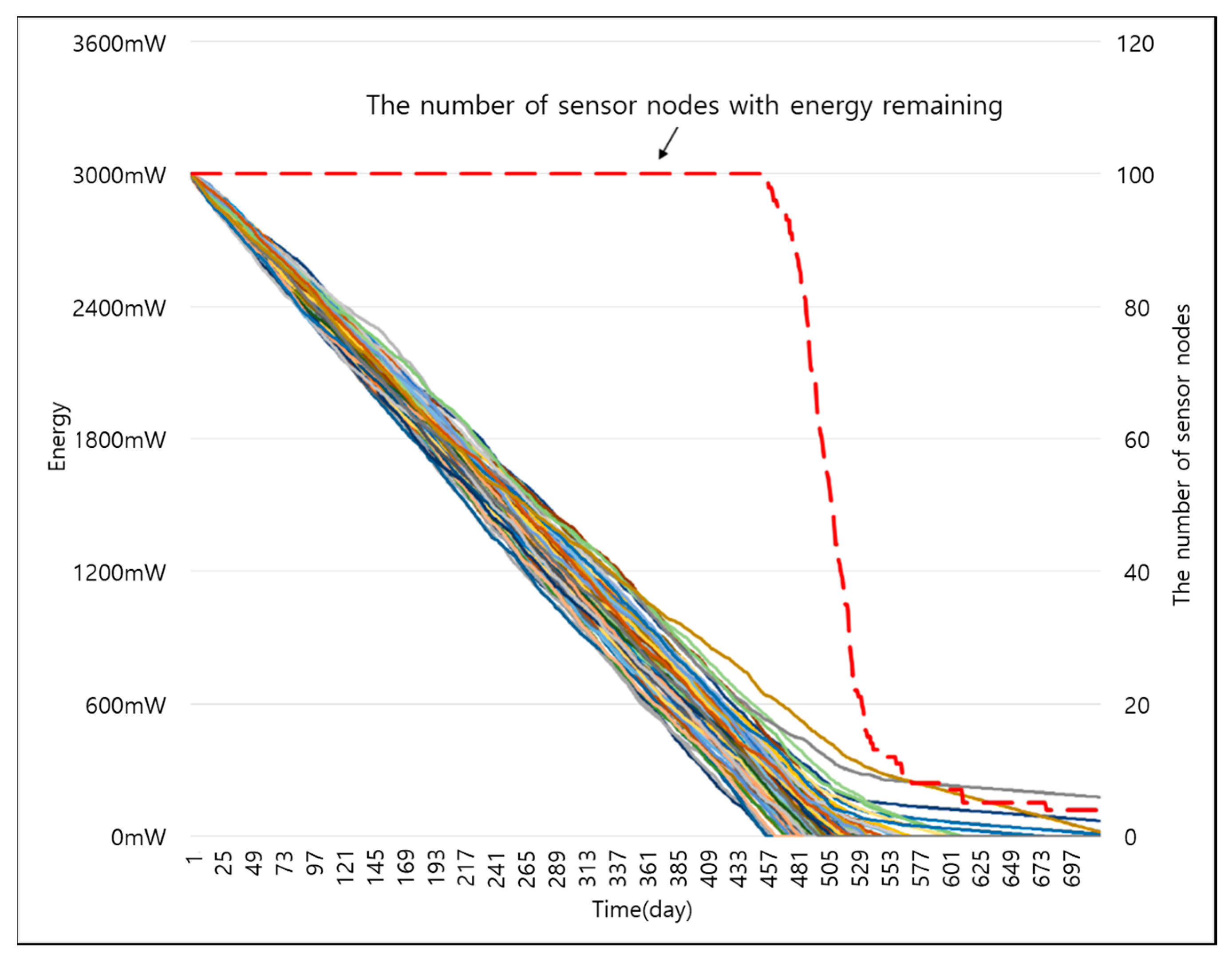
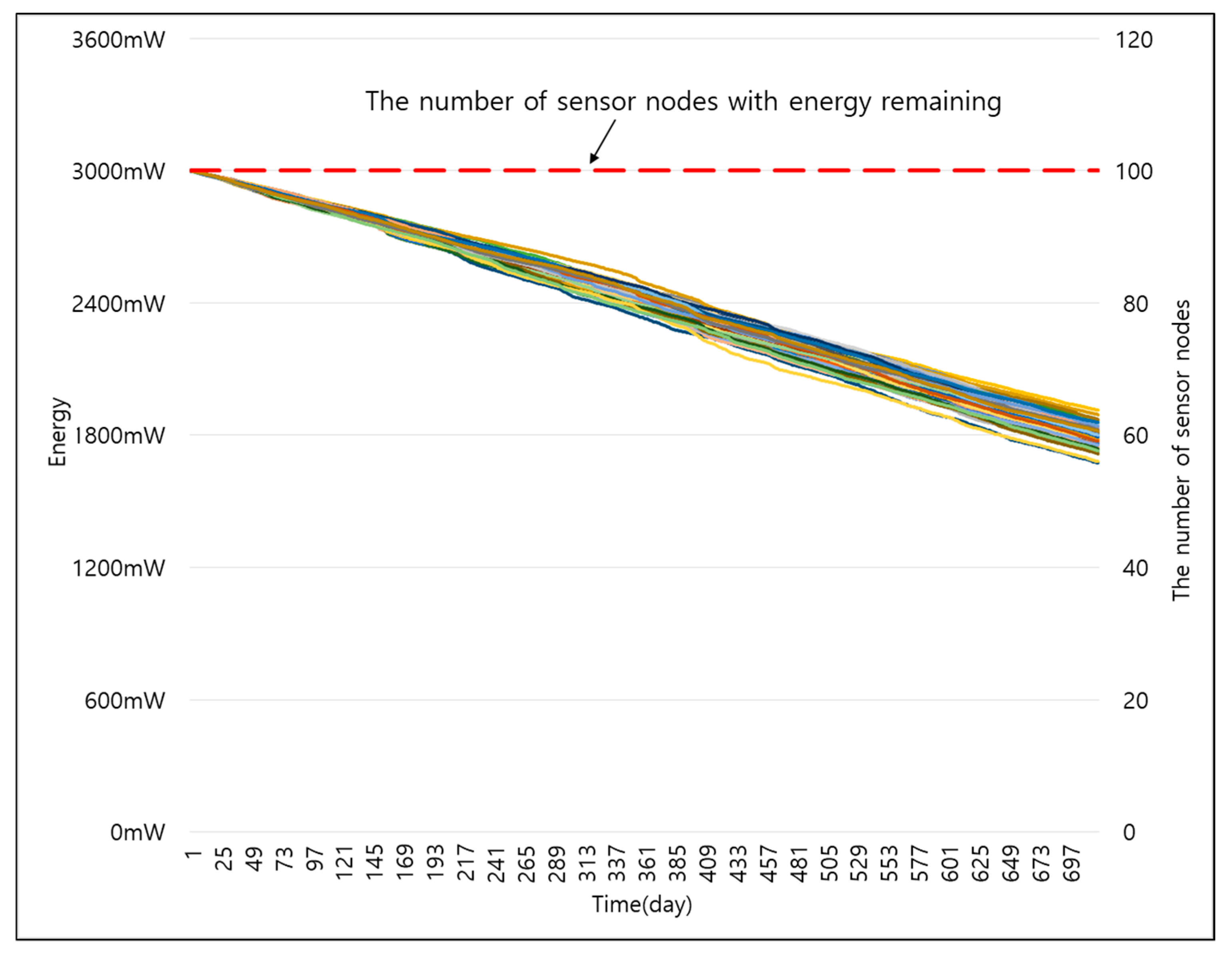
3.2. Comparison of Energy Efficiency of Smart Sensor Nodes Moving in a 3D Space
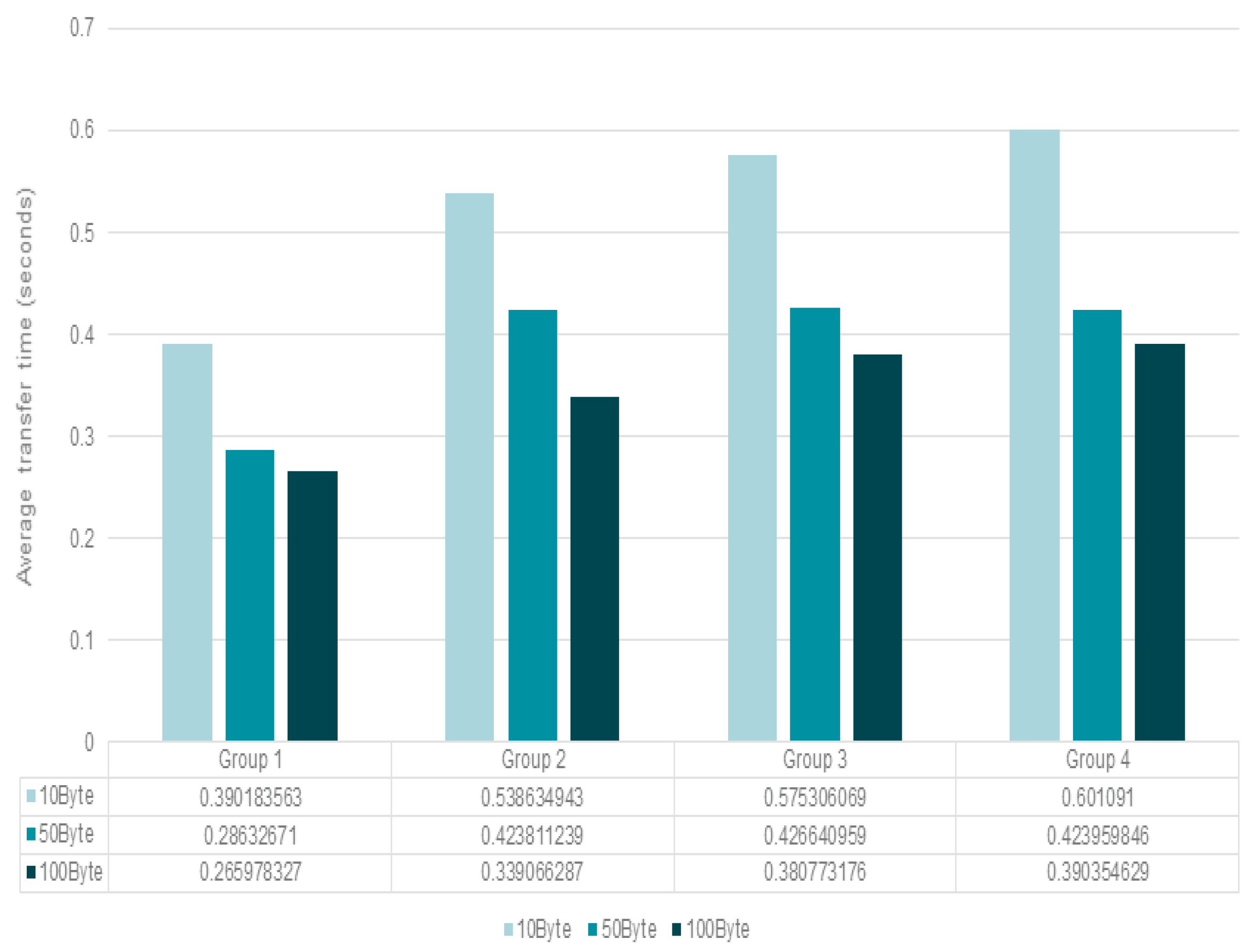
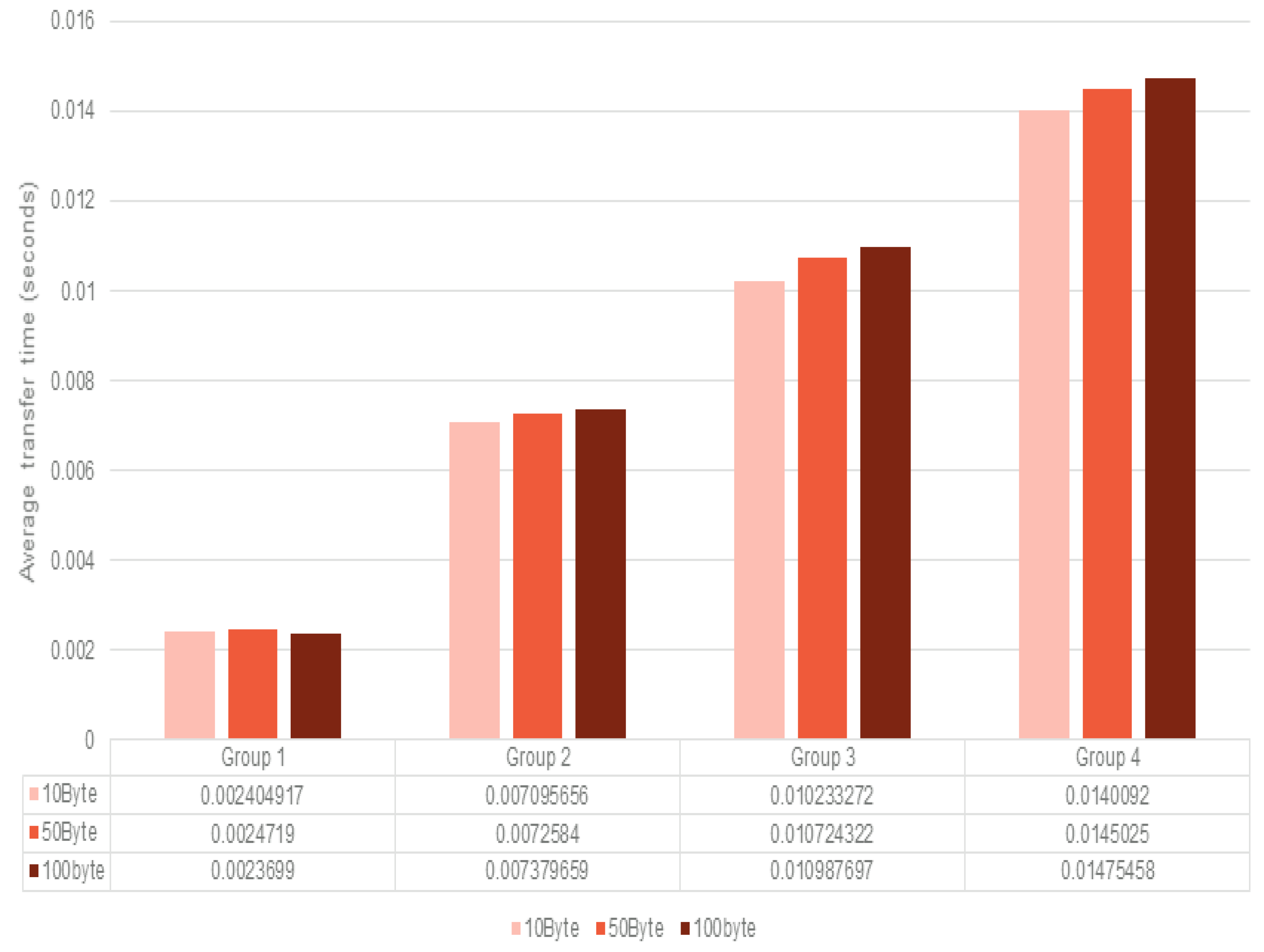
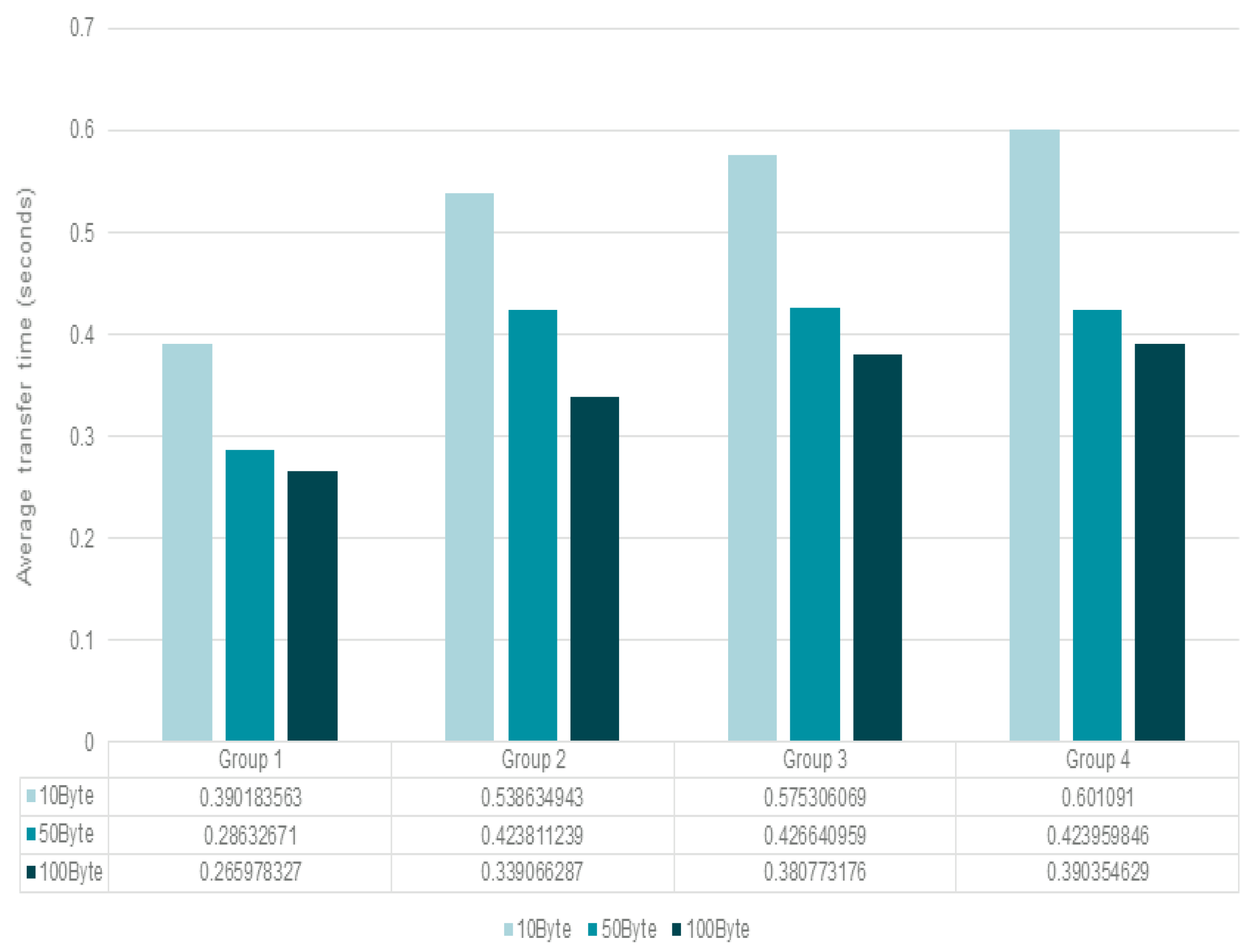
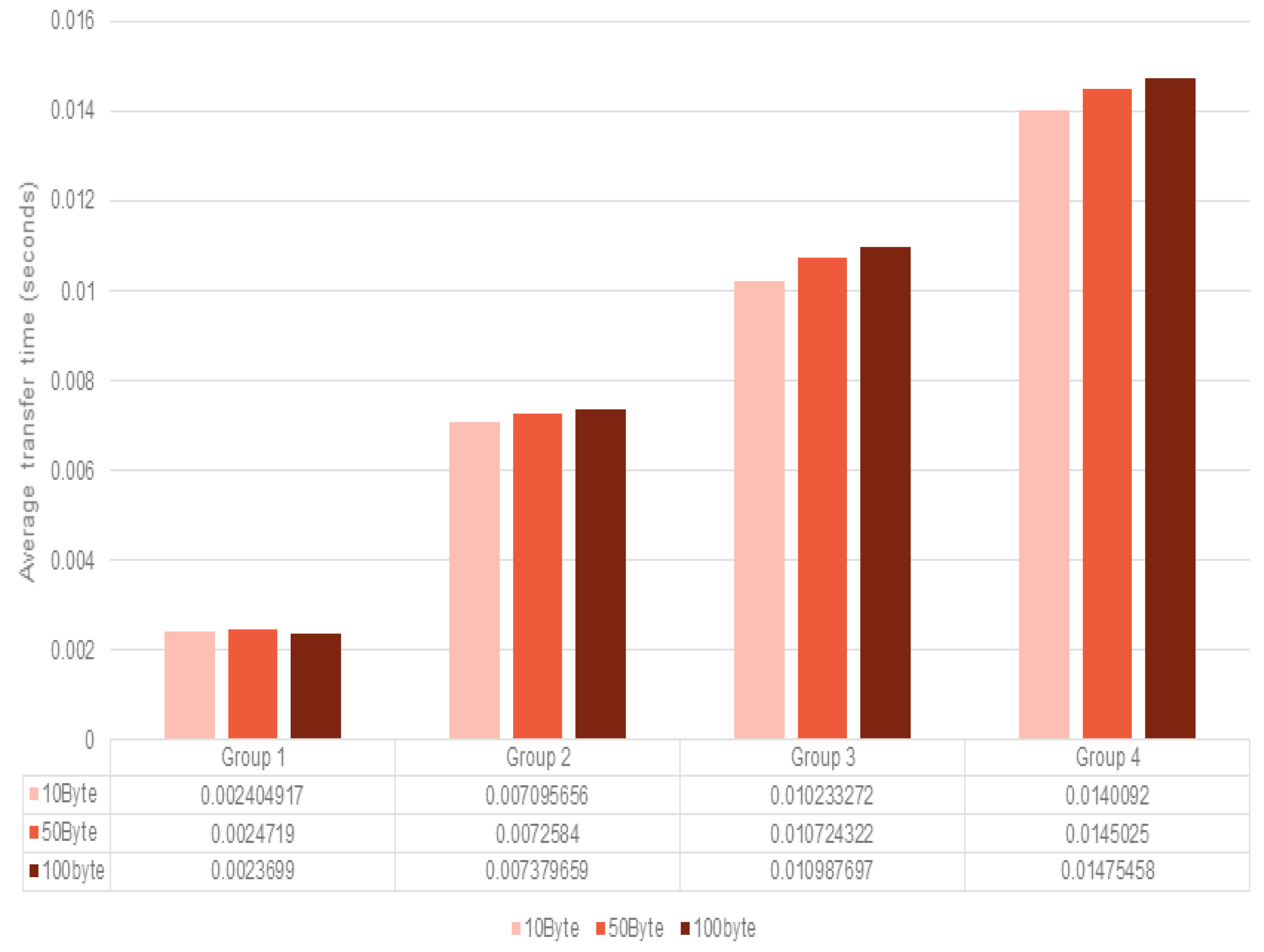
3.3. Comparison of the Average Transmission Duration of Ordinary Data and Urgent Data
4. Discussion
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Taniguchi, E.; Thompson, R.G.; Yamada, T. Recent advances in modelling city logistics. In City Logistics II; Institute of Systems Science Research: Kyoto, Japan, 2001; pp. 3–33. [Google Scholar]
- Hunter, G.W.; Stetter, J.R.; Hesketh, P.; Liu, C.-C. Smart Sensor Systems. Electrochem. Soc. Interface 2010, 19, 29–34. [Google Scholar] [CrossRef]
- IEEE Std. 802.11-2012, IEEE Standard for Information Technology-Telecommunications and Information Exchange between Systems Local and Metropolitan Area Networks-Specific Requirements Part 11: Wireless LAN Medium Access Control (MAC) and Physical Layer (PHY) Specifications; IEEE: Piscataway, NJ, USA, 2012. [Google Scholar]
- Huang, P.; Xiao, L.; Soltani, S.; Mutka, M.W.; Xi, N. The Evolution of MAC Protocols in Wireless Sensor Networks: A survey. IEEE Commun. Surv. Tutor. 2013, 15, 101–120. [Google Scholar] [CrossRef]
- Sohrab, K.; Gao, J.; Ailawadhi, V.; Pottie, G.J. Protocol for Self-Organization of a Wireless Sensor Network. IEEE Pers. Commun. 2000, 7, 16–27. [Google Scholar] [CrossRef]
- ZigBee Alliance. ZigBee Specification, 2012, ZigBee Document 053474r20; ZigBee Alliance: Davis, CA, USA, 2012. [Google Scholar]
- El-Hoiydi, A. Aloha with preamble sampling for sporadic traffic in ad hoc wireless sensor networks. In Proceedings of the 2002 IEEE International Conference on Communications, ICC 2002, New York, NY, USA, 28 April–2 May 2002. [Google Scholar]
- El-Hoiydi, A.; Decotignie, D.; Enz, C.; LeRoux, E. Poster abstract: WiseMAC, an Ultra Low Power MAC protocol for the WiseNet wireless sensor network. In Proceedings of the 1st International Conference on Embedded Networked Sensor Systems, SenSys 03, Los Angeles, CA, USA, 5–7 November 2003; pp. 685–692. [Google Scholar]
- Ye, W.; Heidemann, H.; Estrin, D. An energy-efficient MAC protocol for wireless sensor networks. In Proceedings of the Twenty-First Annual Joint Conference of the IEEE Computer and Communications Societies, INFOCOM 2002, New York, NY, USA, 23–27 June 2002; IEEE: Piscataway, NJ, USA, 2002; Volume 3, pp. 1567–1576. [Google Scholar]
- Dam, T.V.; Langendoen, K. An adaptive energy-efficient MAC protocol for wireless sensor networks. In Proceedings of the 1st International Conference on Embedded Networked Sensor Systems, ACM SenSys ’03, Los Angeles, CA, USA, 5–7 November 2003; pp. 171–180. [Google Scholar]
- Kim, J.H.; Kim, H.N.; Kim, S.G.; Choi, S.J.; Lee, J.Y. Advanced MAC protocol with energy-efficiency for wireless sensor networks. In Proceedings of the International Conference on Information Networking: Convergence in Broadband and Mobile Networking, ICOIN 2005, Jeju Island, Korea, 31 January–2 February 2005; pp. 283–292. [Google Scholar]
- Tang, L.; Su, Y.; Gurewitz, O.; Johnson, D.B. PW-MAC: An energy-efficient predictive-wakeup MAC protocol for wireless sensor networks. In Proceedings of the INFOCOM 2011, Shanghai, China, 10–15 April 2011; pp. 1305–1313. [Google Scholar]
- Lu, Z.; Luo, T.; Wang, X. XY-MAC: A short preamble MAC with sharpened pauses for wireless sensor networks. In Proceedings of the 2012 IEEE Wireless Communications and Networking Conference (WCNC), Paris, France, 1–4 April 2012; pp. 1550–1554. [Google Scholar]
- Fafoutis, X.; Dragoni, N. ODMAC: An on-demand MAC protocol for energy harvesting—Wireless sensor networks. In Proceedings of the 8th ACM Symposium on Performance Evaluation of Wireless ad hoc, Sensor, and Ubiquitous Networks, ACM PE-WASUN ‘11, Miami, FL, USA, 3–4 November 2011; pp. 49–56. [Google Scholar]
- Yoo, D.S.; Choi, S.S. Medium Access Control with Dynamic Frame Length in Wireless Sensor Networks. J. Inf. Process. Syst. 2010, 6, 501–510. [Google Scholar] [CrossRef]
- Xu, D.; Wang, K. An adaptive traffic MAC protocol based on correlation of nodes. EURASIP J. Wirel. Commun. Netw. 2015, 2015, 258. [Google Scholar] [CrossRef]
- Kim, S.H.; Joh, H.G.; Choi, S.J.; Ryoo, I.T. Energy Efficient MAC Scheme for Wireless Sensor Networks with High-Dimensional Data Aggregate. Math. Probl. Eng. 2015, 2015, 803834. [Google Scholar] [CrossRef]
- Ryoo, I.T.; Sun, K.H.; Lee, J.S.; Kim, S.H. A 3-dimensional group management MAC scheme for mobile IoT devices in wireless sensor networks. J. Ambient Intell. Humaniz. Comput. 2017, 8, 1–12. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Components | Descriptions |
|---|---|
| System Environment (physical space) | 2 km × 2 km |
| No. of Sensor Nodes | 1 sink node, 50 sensor nodes |
| Communication Module of Sensor Nodes Applied to the Simulation | ZigBee |
| Power Consumption When a Sensor Node Transmits Data | 0.54 mW |
| Power Consumption When a Sensor Node Receives Data | 0.54 mW |
| Power Consumption When a Sensor Node Is in the Standby Mode | 0.56 mW |
| Data Generated | poisson (50) |
| Data Size | 1 byte |
| Simulation Period | 6 months |
| Parameter value α | 2 |
| Components | Descriptions |
|---|---|
| System Environment (physical space) | 300 m × 300 m × 300 m |
| No. of Sensor Nodes | 1 Sink Node, 100 Sensor Devices |
| Communication Module of Sensor Nodes Applied to the Simulation | CC2420 Radio Transceiver Produced by Texas Instrument |
| Initial Energy of Sensor Nodes | 3000 mW |
| Power Consumption When a Sensor Node Transmits Data | 52.2 mW |
| Power Consumption When a Sensor Node Receives Data | 56.4 mW |
| Power Consumption When a Sensor Node Is in the Standby Mode | 56.4 mW |
| Max. Buffer Size of Sensor Nodes | 1024 Btyes |
| dw (the weight value for movement) | 0.5 |
| maxD (Max. Transmission Distance of Sensor Nodes) | 90 m (ZigBee Transmission Distance) |
| Data Generated | According to Poisson Distribution, Once Each Minute on Average |
| Transmission Distance Baseline for Group ID Renewal | 1 |
| Max. Movement Speed of Sensor Nodes | 5 m/min (Sink nodes and sensor nodes move randomly) |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, K.; Ryoo, I. A Smart Sensor Data Transmission Technique for Logistics and Intelligent Transportation Systems. Informatics 2018, 5, 15. https://doi.org/10.3390/informatics5010015
Sun K, Ryoo I. A Smart Sensor Data Transmission Technique for Logistics and Intelligent Transportation Systems. Informatics. 2018; 5(1):15. https://doi.org/10.3390/informatics5010015
Chicago/Turabian StyleSun, Kyunghee, and Intae Ryoo. 2018. "A Smart Sensor Data Transmission Technique for Logistics and Intelligent Transportation Systems" Informatics 5, no. 1: 15. https://doi.org/10.3390/informatics5010015
APA StyleSun, K., & Ryoo, I. (2018). A Smart Sensor Data Transmission Technique for Logistics and Intelligent Transportation Systems. Informatics, 5(1), 15. https://doi.org/10.3390/informatics5010015