Effect of Unmanned Aerial Vehicles on the Spatial Distribution of Analytes from Point Source


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Materials and Methods
3. Results
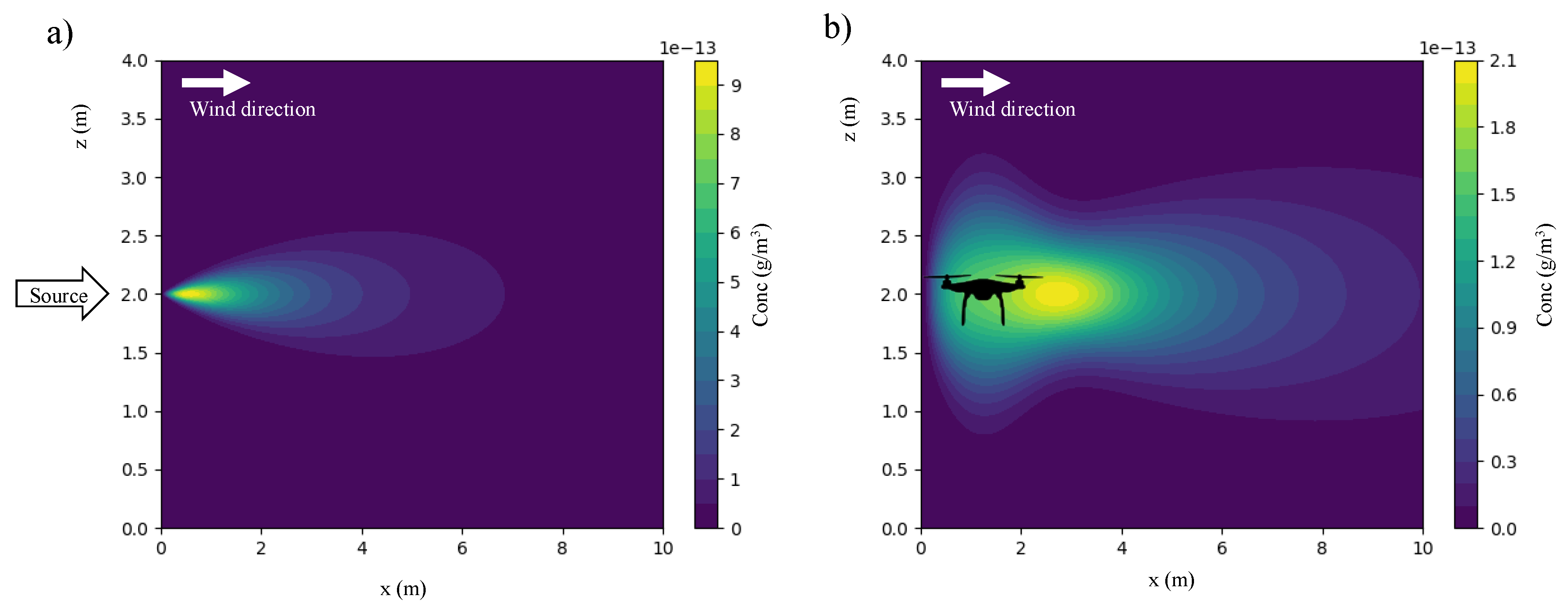
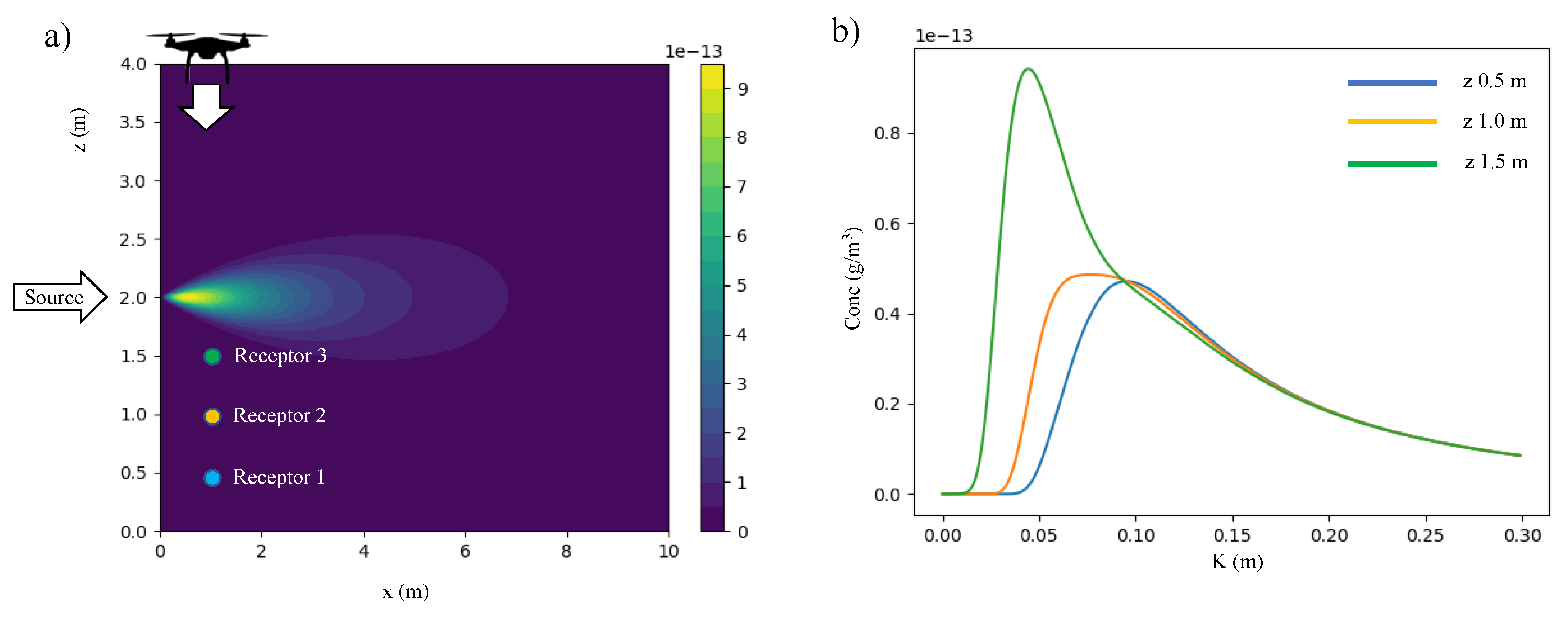
3.1. Theoretical Investigation
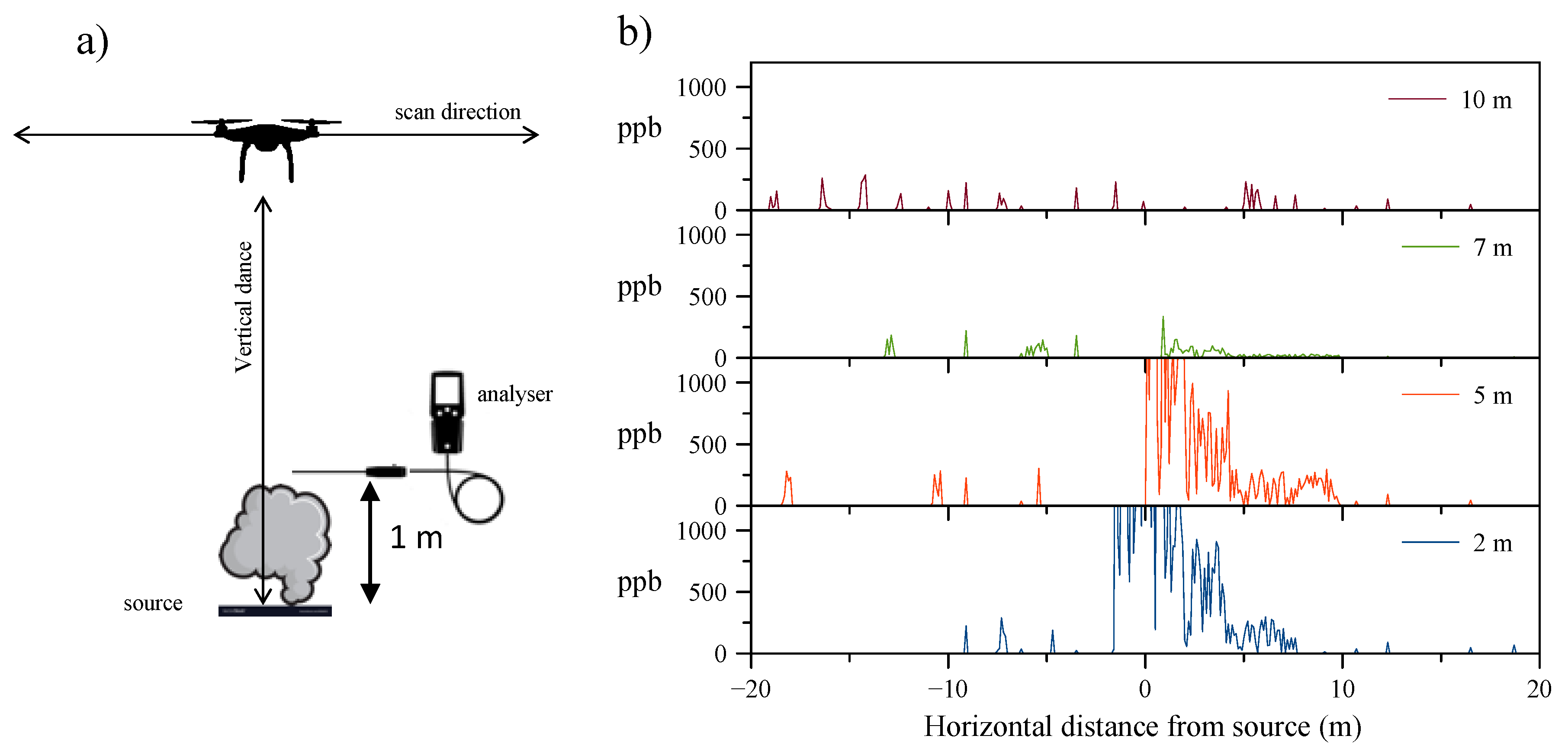
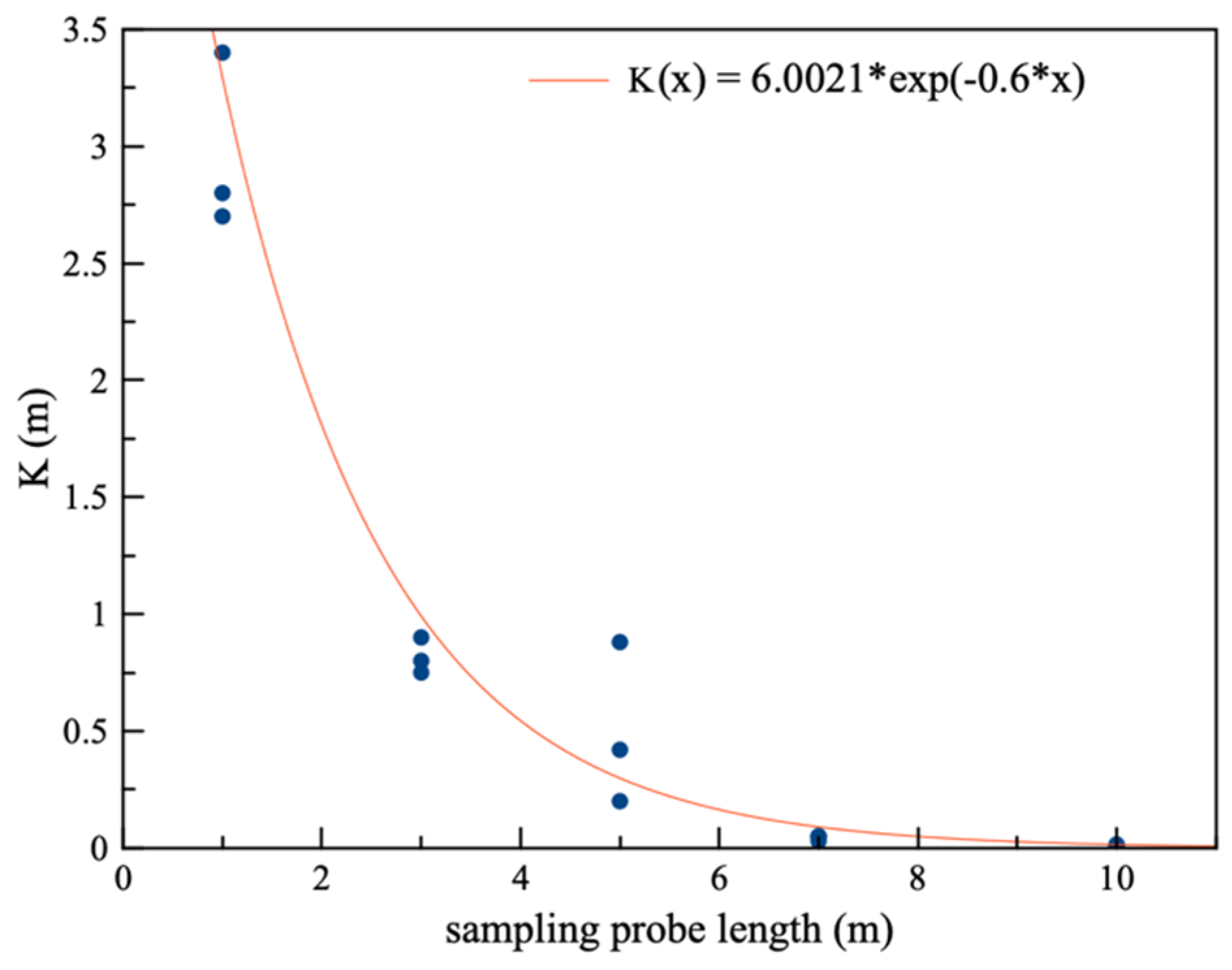
3.2. In-Field Measurements
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Everts, S.; Davenport, M. How drones help us study our climate, forecast weather. C&EN Glob. Enterp. 2016, 94, 34–36. [Google Scholar]
- Zhang, C.; Kovacs, J.M. The application of small unmanned aerial systems for precision agriculture: A review. Precis. Agric. 2012, 13, 693–712. [Google Scholar] [CrossRef]
- Diaz, J.A.; Pieri, D.; Wright, K.; Sorensen, P.; Kline-Shoder, R.; Arkin, C.R.; Fladeland, M.; Bland, G.; Buongiorno, M.F.; Ramirez, C.; et al. Unmanned aerial mass spectrometer systems for in-situ volcanic plume analysis. J. Am. Soc. Mass Spectrom. 2015, 26, 292–304. [Google Scholar] [CrossRef] [PubMed]
- Nathan, B.J.; Golston, L.M.; O’Brien, A.S.; Ross, K.; Harrison, W.A.; Tao, L.; Lary, D.J.; Johnson, D.R.; Covington, A.N.; Clark, N.N.; et al. Near-Field Characterization of Methane Emission Variability from a Compressor Station Using a Model Aircraft. Environ. Sci. Technol. 2015, 49, 7896–7903. [Google Scholar] [CrossRef] [PubMed]
- Bayat, B.; Crasta, N.; Crespi, A.; Pascoal, A.M.; Ijspeert, A. Environmental monitoring using autonomous vehicles: A survey of recent searching techniques. Curr. Opin. Biotechnol. 2017, 45, 76–84. [Google Scholar] [CrossRef] [PubMed]
- Aurell, J.; Mitchell, W.; Chirayath, V.; Jonsson, J.; Tabor, D.; Gullett, B. Field determination of multipollutant, open area combustion source emission factors with a hexacopter unmanned aerial vehicle. Atmos. Environ. 2017, 166, 433–440. [Google Scholar] [CrossRef] [PubMed]
- Gu, Q.; Michanowicz, D.R.; Jia, C. Developing a Modular Unmanned Aerial Vehicle (UAV) Platform for Air Pollution Profiling. Sensors 2018, 18, 4363. [Google Scholar] [CrossRef] [PubMed]
- Villa, T.F.; Salimi, F.; Morton, K.; Morawska, L.; Gonzalez, F. Development and validation of a UAV based system for air pollution measurements. Sensors 2016, 16, 2202. [Google Scholar] [CrossRef] [PubMed]
- Zhou, F.; Pan, S.; Chen, W.; Ni, X.; An, B. Monitoring of compliance with fuel sulfur content regulations through unmanned aerial vehicle (UAV) measurements of ship emissions. Atmos. Meas. Tech. 2019, 12, 6113–6124. [Google Scholar] [CrossRef]
- Dinkelaker, N.; Oripova, A.; Berman, I.; Pantiukhin, I.; Zavialova, I.; Bulatov, V. Comparative Analysis of Air Pollution Measurements between Compact Mobile Sensors and Standardized Laboratory Methods. Int. J. Electr. Electron. Eng. Telecommun. 2019. [Google Scholar] [CrossRef]
- Rossi, M.; Brunelli, D.; Adami, A.; Lorenzelli, L.; Menna, F.; Remondino, F. Gas-Drone: Portable gas sensing system on UAVs for gas leakage localization. In IEEE SENSORS 2014 Proceedings; IEEE: Piscataway, NJ, USA, 2014; pp. 1431–1434. [Google Scholar]
- Shigaki, S.; Fikri, M.R. Design and experimental evaluation of an odor sensing method for a pocket-sized quadcopter. Sensors 2018, 18, 3720. [Google Scholar] [CrossRef] [PubMed]
- Islam, A.; Houston, A.L.; Shankar, A.; Detweiler, C. Design and evaluation of sensor housing for boundary layer profiling using multirotors. Sensors 2019, 19, 2481. [Google Scholar] [CrossRef] [PubMed]
- Directive 2008/1/EC. Off. J. Eur. Union 2008, L25, 51.
- Faragó, I.; Georgiev, K.; Havasi, Á. (Eds.) Advances in Air Pollution Modeling for Environmental Security; NATO Science Series; Springer: Berlin/Heidelberg, Germany, 2005; Volume 54. [Google Scholar]
- Monitto, R.; Tuccitto, N. Shadow ribbon: A detailed study of complex chemical plants with a simple integrated approach. RSC Adv. 2014, 4, 32237–32240. [Google Scholar] [CrossRef]
- Vitale, S.; Zappalà, G.; Tuccitto, N. Filling station short-range impact on the surrounding area: A novel methodology for environmental monitoring based on the shadows study. Environ. Technol. Innov. 2015, 4, 210–217. [Google Scholar] [CrossRef]
- Pasquill, F. The Estimation of The Dispersion of Windborne Material. Meteorol. Mag. 1961, 90. [Google Scholar] [CrossRef]
- Spalart, P. Strategies for turbulence modelling and simulations. Int. J. Heat Fluid Flow 2000, 21, 252–263. [Google Scholar] [CrossRef]
- Spalart, P.R.; Allmaras, S.R. One-equation turbulence model for aerodynamic flows. Rech. Aerosp. 1994. [Google Scholar] [CrossRef]
- Ventura Diaz, P.; Yoon, S. High-Fidelity Computational Aerodynamics of Multi-Rotor Unmanned Aerial Vehicles. In 2018 AIAA Aerospace Sciences Meeting; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2018. [Google Scholar]





© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li-Destri, G.; Menta, D.; Menta, C.; Tuccitto, N. Effect of Unmanned Aerial Vehicles on the Spatial Distribution of Analytes from Point Source. Chemosensors 2020, 8, 77. https://doi.org/10.3390/chemosensors8030077
Li-Destri G, Menta D, Menta C, Tuccitto N. Effect of Unmanned Aerial Vehicles on the Spatial Distribution of Analytes from Point Source. Chemosensors. 2020; 8(3):77. https://doi.org/10.3390/chemosensors8030077
Chicago/Turabian StyleLi-Destri, Giovanni, Dario Menta, Carmelo Menta, and Nunzio Tuccitto. 2020. "Effect of Unmanned Aerial Vehicles on the Spatial Distribution of Analytes from Point Source" Chemosensors 8, no. 3: 77. https://doi.org/10.3390/chemosensors8030077
APA StyleLi-Destri, G., Menta, D., Menta, C., & Tuccitto, N. (2020). Effect of Unmanned Aerial Vehicles on the Spatial Distribution of Analytes from Point Source. Chemosensors, 8(3), 77. https://doi.org/10.3390/chemosensors8030077