3.1. Motion Analysis of Drive System
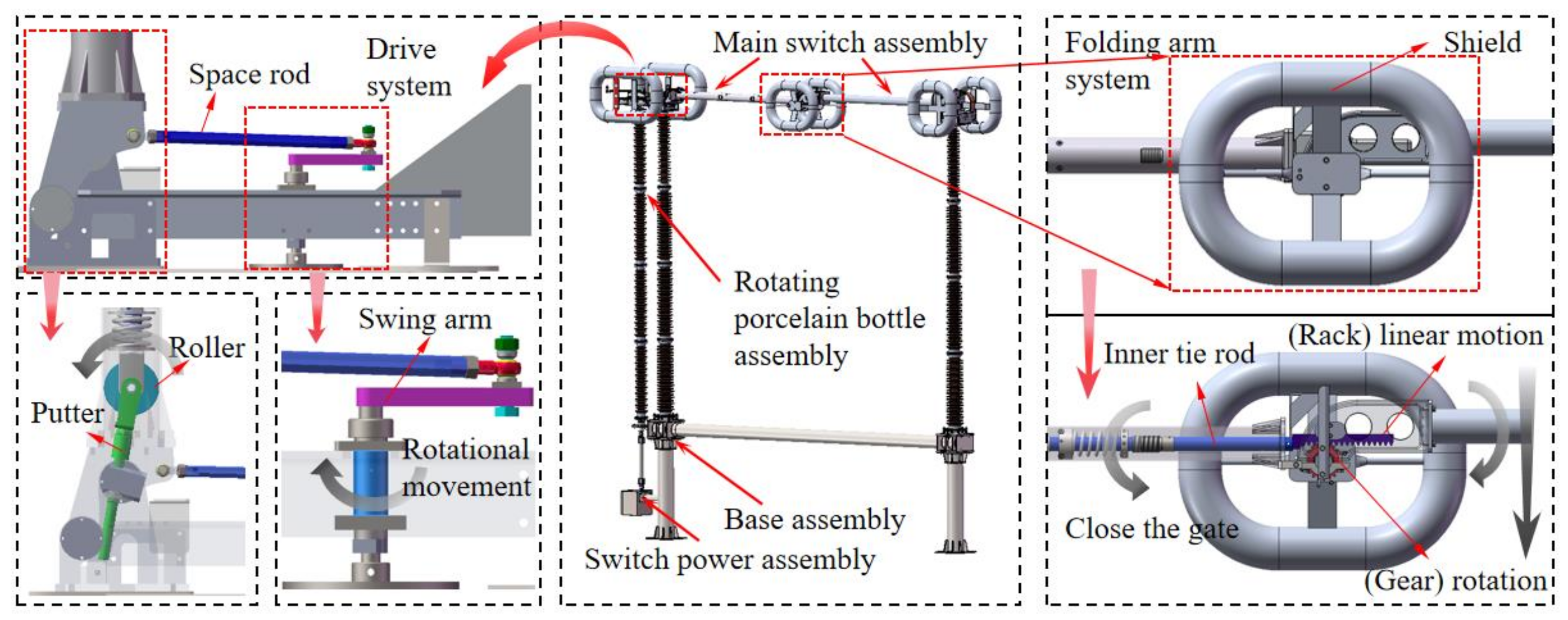
The main switch of disconnector mainly includes drive system and folding arm system. The mathematical models of the two parts are established respectively, and the geometric relationship between the components is deduced, which provides a theoretical basis for the later optimization design.
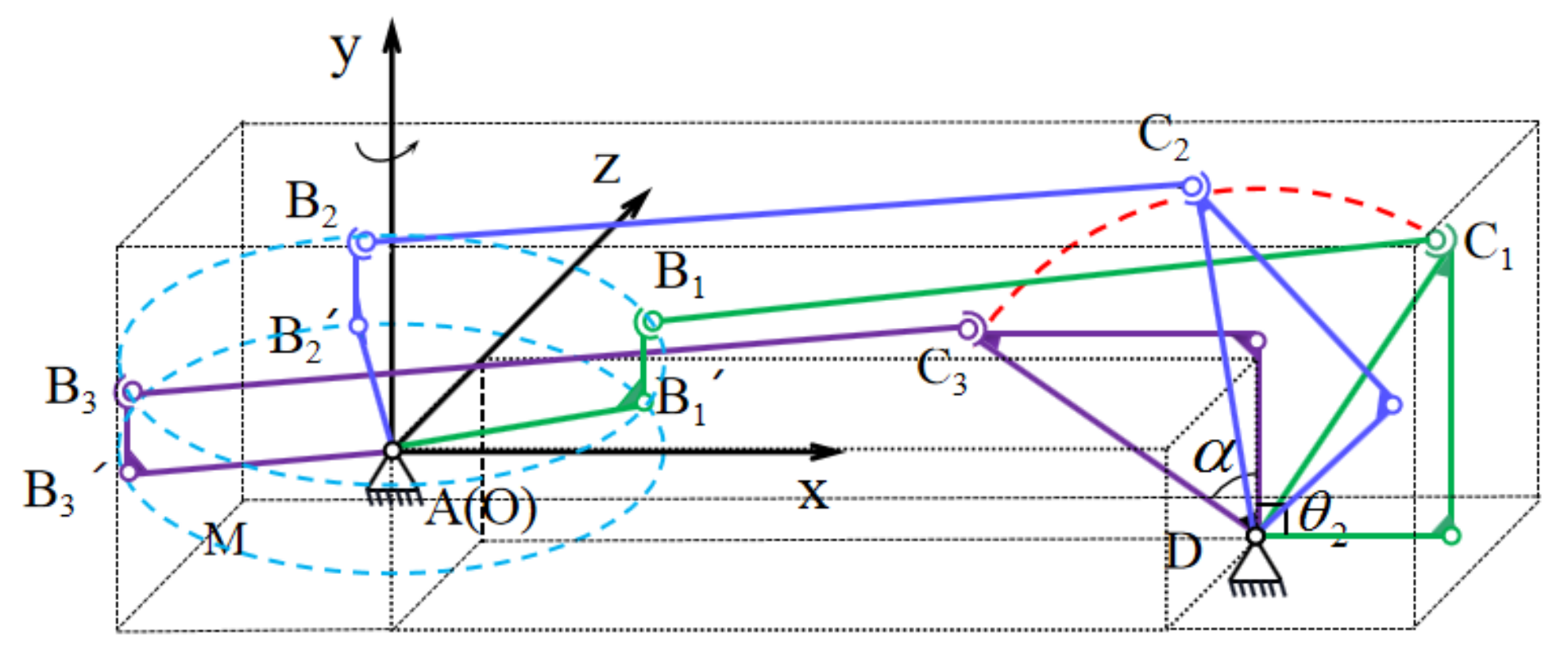
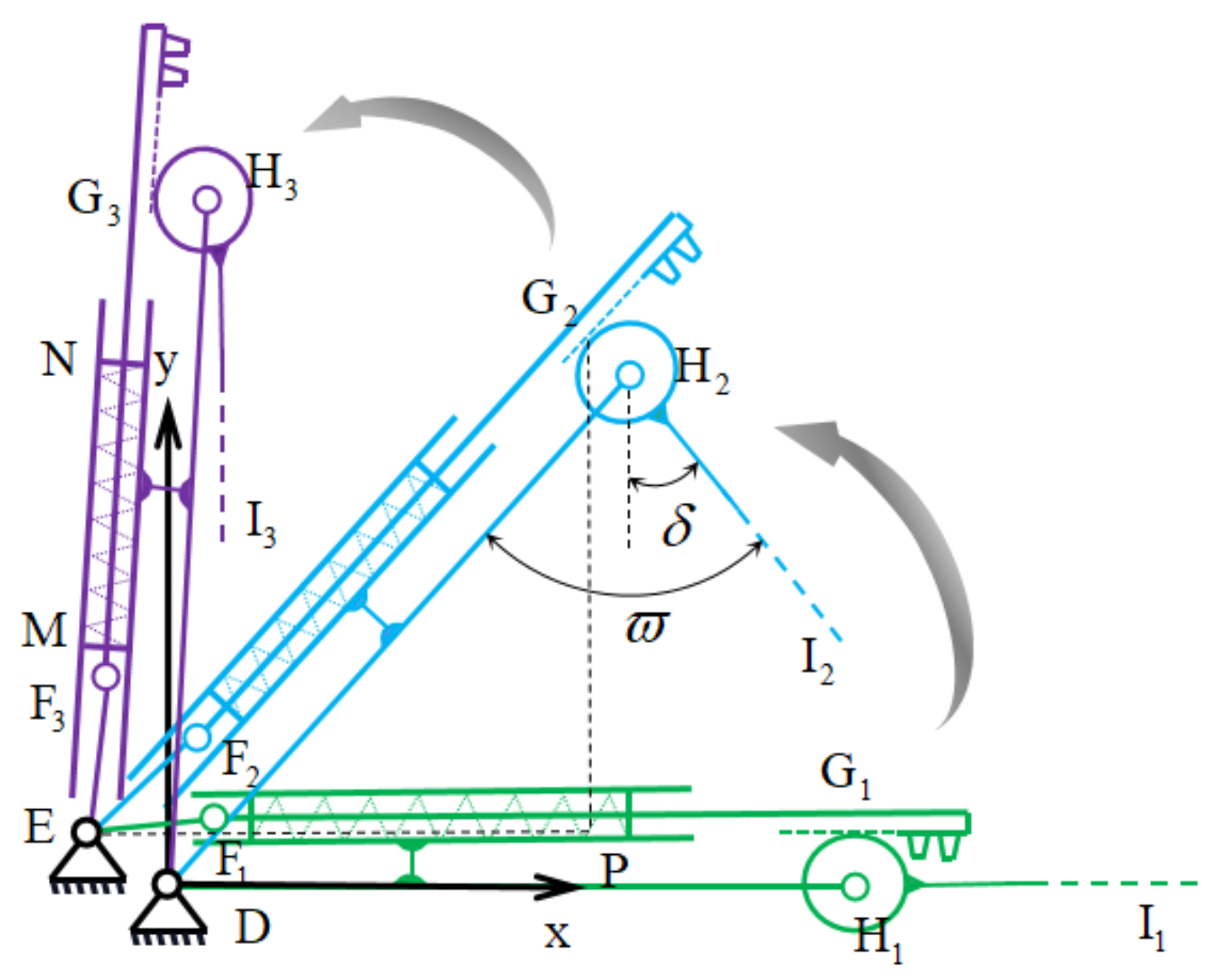
The mathematical analysis model of the drive system is shown in
Figure 3. The coordinate system O-xyz is established at O (0,0,0), where point A coincides with point O, Subscript 1 represents the initial position of the spatial four-bar, subscript 2 represents a certain position in the middle of the spatial four-bar, and subscript 3 represents the end position of the spatial four-bar. In the
Figure 3, A and D are the fixed frame, AB′ is the rotating arm, and it rotates in the M plane around point A with Oy as the axis; AB′ and BB′ are a whole, moving with the movement of AB′; BC is the space rod, B and C are the ball pairs; the CD is a frame that rotates around point D. Suppose the turning angle of AB′ is
, the included angle of frame D is
, and the angle between swing arm and space rod is
. In this paper, the coordinates of all points are expressed as
in the form of column vector, and the name of the point is expressed by subscript (for example, the coordinate of point D is
). Let AB′ = L
1, BB′ = L
2, BC = L
3, CD = L
4.
- (1)
The value of
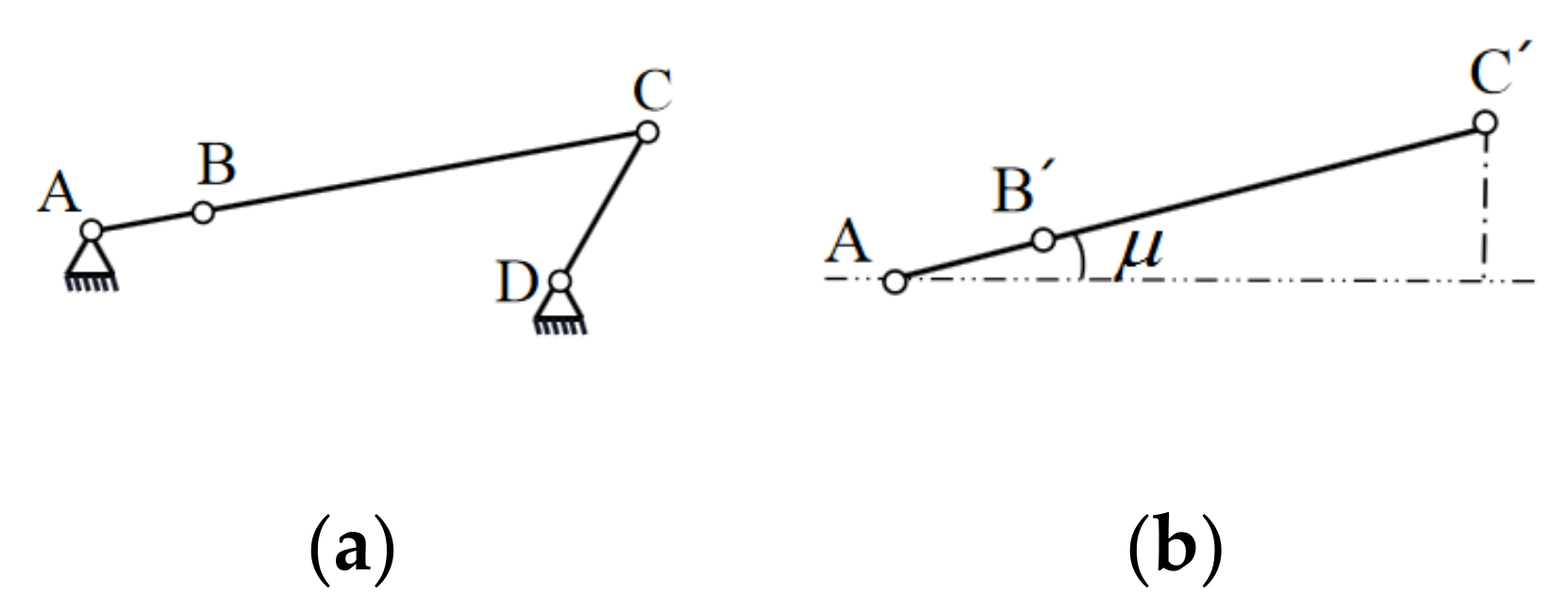
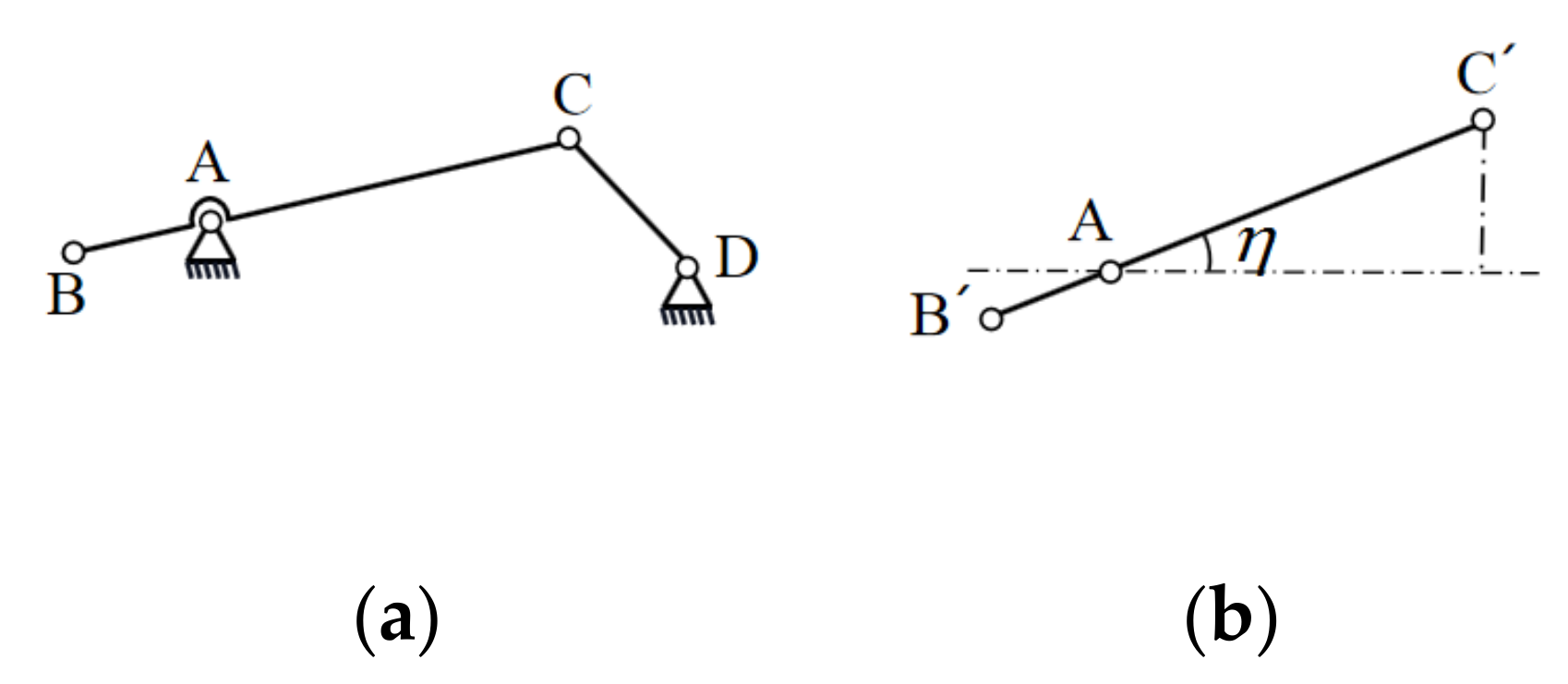
In order to ensure the stability of the mechanism when opening and closing the disconnector, it is necessary to ensure that the swing arm AB′ and the pull rod BC are at the dead center position relative to the component CD. The schematic diagram of the four-bar mechanism in the closed state is shown in
Figure 4. The projection of the swing arm and the pull rod on the rotating plane of the swing arm are on the same straight line. Assuming that the angle between the swing arm and the horizontal axis of the base is
, according to
Figure 4b, we can get:
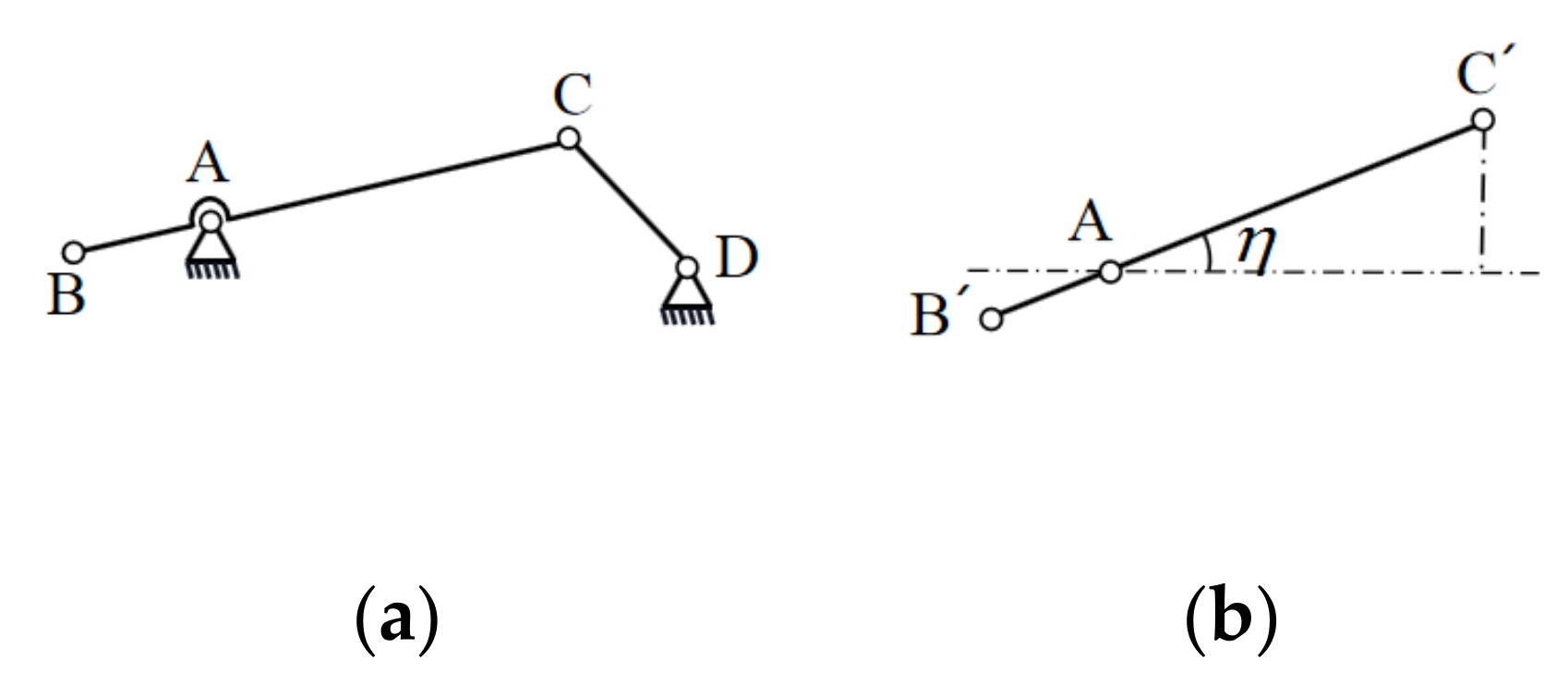
The schematic diagram of the four-bar mechanism in the open state is shown in
Figure 5. Since the rod length of the space rod BC is much larger than the length of BB′, the length of BB′ is ignored and it is approximately regarded as the swing arm and the draw rod parallel. The angle between the horizontal axes of the base is
, according to
Figure 5b, we can get:
Therefore, the value range of the swing arm:
where
is the maximum turning angle of swing arm.
- (2)
Establish expressions for and
When the motor drives AB′ to rotate, the frame CD will rotate with the movement of the multi-link. According to the geometric relationship between the bars in
Figure 3, the following equation can be obtained.
The swing arm moves in the M plane, and the coordinate vector of point B′ can be obtained from the coordinate relationship between A and B′:
where
and are the relation coefficient matrix and parameter matrix of points A and B′ respectively, and are the coordinate vectors of points A and B′ respectively.
The movement of BB′ is perpendicular to the M plane, then the coordinate vector of point B is:
Substituting Equation (6) into Equation (8), we can get:
In the plane where the frame D rotates, the coordinate vector of point C can be obtained from point D:
where
and are the relation coefficient matrix and parameter matrix of points C and D respectively, and are the coordinate vectors of points C and D respectively.
From the coordinates of B and C, the length of BC rod can be obtained as:
By substituting Equation (9) and Equation (10) into Equation (12), we can get:
It can be seen from Equation (13) that under the condition that the length of each pole is determined, the functional relationship between the angle of the swing arm
and the angle of the lower conducting rod
can be obtained, where
is the implicit function of
.
where
,
.
3.2. Motion Analysis of Folding Arm System
The main switch of disconnector mainly includes drive system and folding arm system. The mathematical models of the two parts are established respectively, and the geometric relationship between the components is deduced, which provides a theoretical basis for the later optimization design.
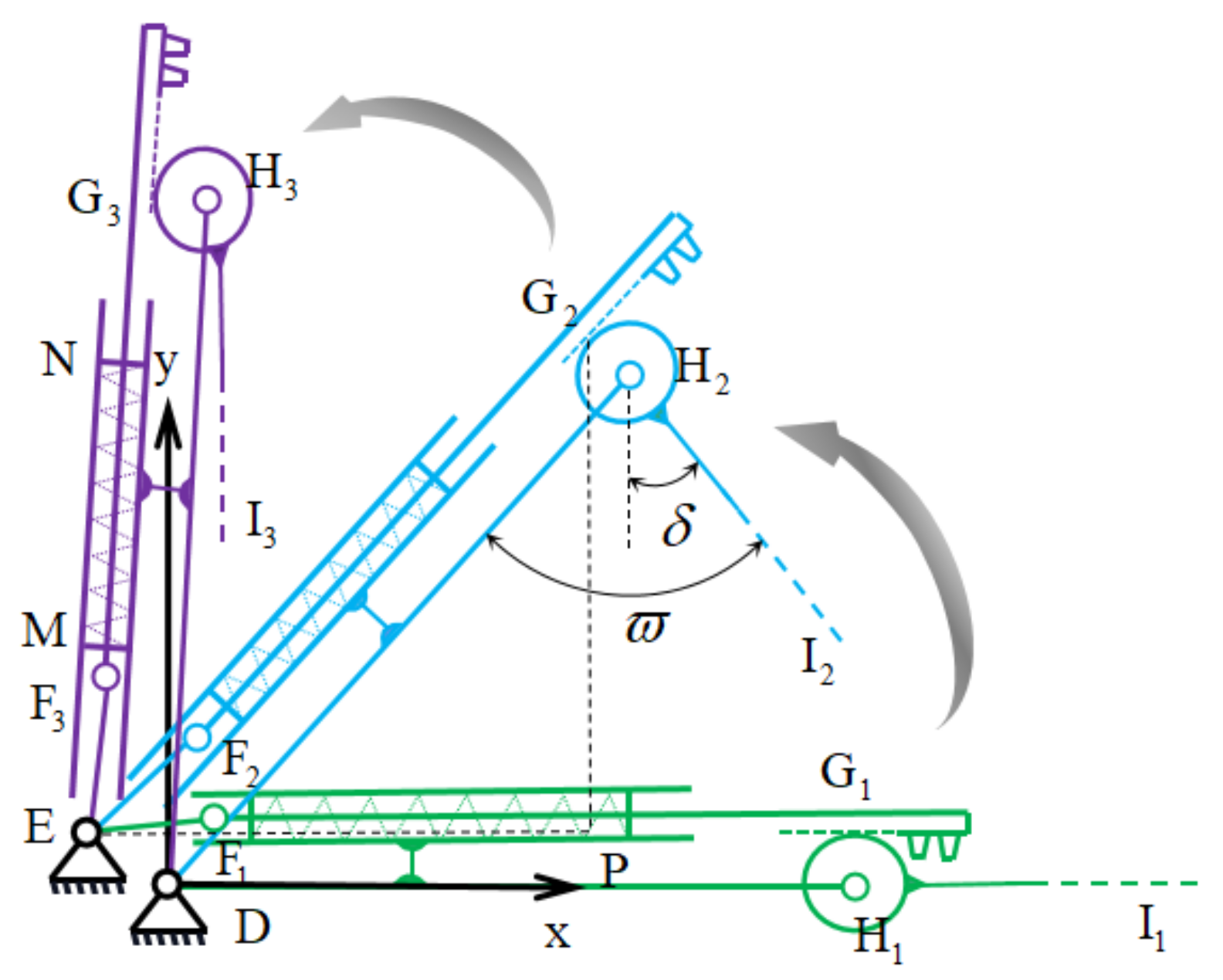
In order to ensure that the folding arm does not interfere with the frame when closing, the movement diagram of the folding arm system as shown in
Figure 6 is established. Establish a coordinate system D-xy at D, where the subscript 1 represents the closing position of the folding arm system, the subscript 2 represents a certain position in the middle of the folding arm system, and the subscript 3 represents the opening position of the folding arm system. The relationship between geometric and motion parameters of the folding arm system is analyzed to provide theoretical guidance for the optimal design of spatial four-bar linkage. Let DE = R, DH = L
5, GH = r, EG = T, the angle between the folding arm is
, and the angle between DE and y axis is
.
From the geometric relationship of the organization diagram:
Substituting Equation (17) into Equation (16), we can get:
In the initial state, the mechanism is in the closed state, and we can get:
The end of the inner rod is a rack, and the upper conducting rod and the gear are the same whole. When the unfolding mechanism moves, under the action of the rack and pinion, the upper conductive rod rotates with the gear. From the motion diagram, we can see that the change of EG is the arc length that the gear has rotated, and we can get:
Substituting Equation (21) into Equation (22), we can get:
Substituting Equation (23) into Equation (24), we can get:
It can be seen from Equation (25) that during the operation of the disconnector, the included angle of the folding arm is related to the distance between the frame D and E, the radius of the gear, the included angle between DE and the vertical line, and the angle of the lower conducting rod. In order to avoid interference to the base when the folding arm system is opened, it is necessary to limit the angle of the folding arm so that the angle range of the lower conductive rod can be obtained.
Based on the analysis of the mathematical model of the drive system and the folding arm system, the statistical table of the hard point statistics of disconnector and the expression of the relationship between the parameters can be obtained (
Table 1), which provides a theoretical basis for the optimization of the parametric prototype model and design model.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}