
Unified Representation of Curves and Surfaces

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Knot Interval
3. I-Splines
3.1. Basic Concepts
3.2. Mathematical Description
3.2.1. Coordinates of Control Points
3.2.2. I-Spline Formula
3.2.3. I-Spline Curves
3.2.4. I-Spline Surfaces
4. Local Refinement of I-Splines
4.1. Refinement of the Blending Functions
4.2. Local Refinement Algorithm
4.2.1. The Topology Stage
4.2.2. The Geometry Stage
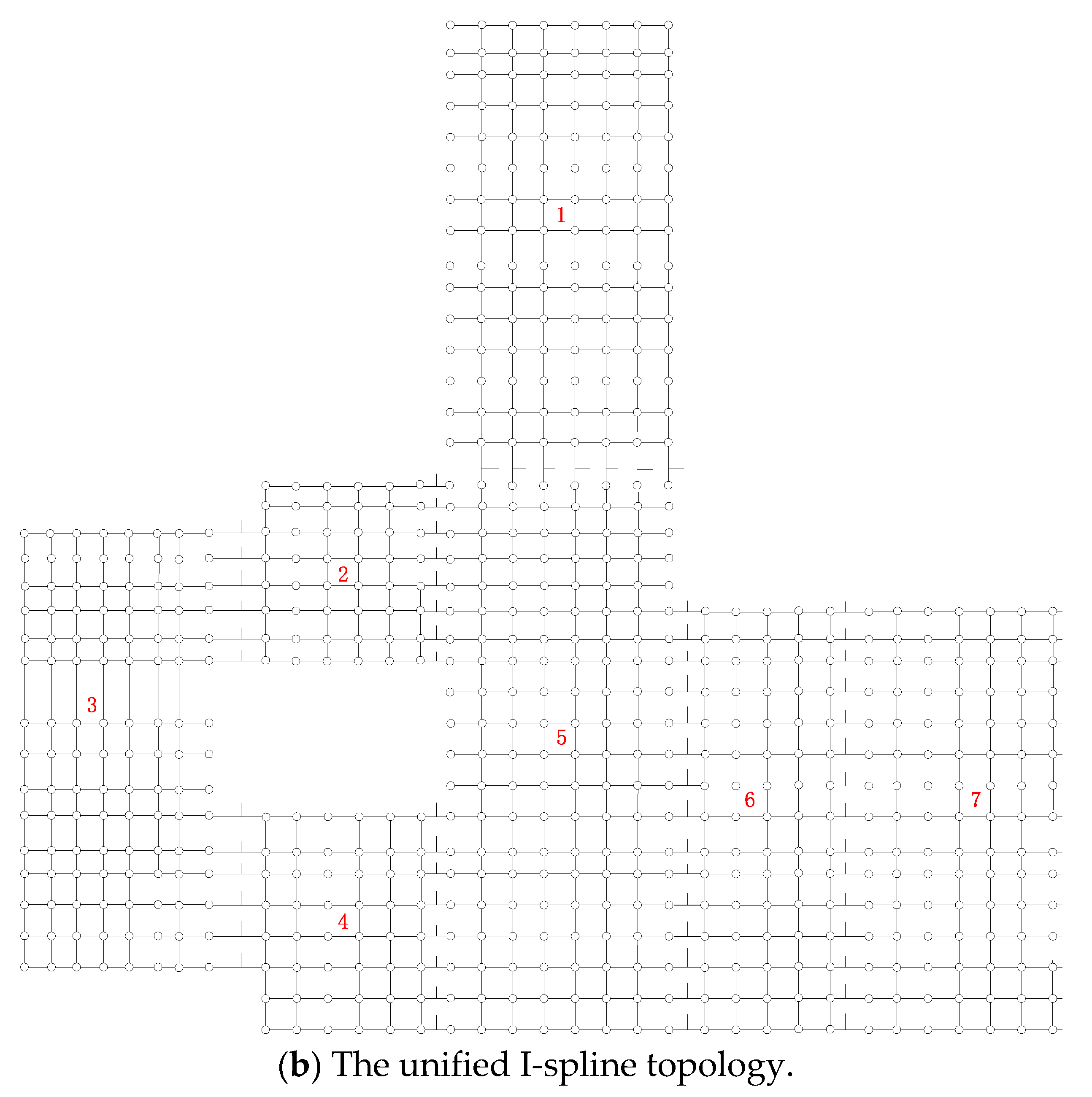
5. Unified Representation of Curves and Surfaces
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Cohen, E.; Riesenfeld, R.F.; Elber, G. Geometric Modeling with Splines: An Introduction; AK Peters: Natick, MA, USA, 2001. [Google Scholar]
- Piegl, L.; Tiller, W. The NURBS Book; Springer: New York, NY, USA, 1997. [Google Scholar]
- Doo, D.; Sabin, M. Behaviour of recursive division surfaces near extraordinary points. Comput. Aided Des. 1978, 10, 356–360. [Google Scholar] [CrossRef]
- Sederberg, T.W.; Zheng, J.; Bakenov, A.; Nasri, A. T-slines and T-NURCCs. ACM Trans. Graph. 2003, 22, 477–484. [Google Scholar] [CrossRef]
- Sederberg, T.W.; Cardon, D.L.; Finnigan, G.T.; North, N.S.; Zheng, J.; Lyche, T. T-spline simplification and local refinement. ACM Trans. Graph. 2004, 23, 276–283. [Google Scholar] [CrossRef]
- Wang, A.; Zhao, G. The Analysis of T-spline Blending Functions Linear Independence. Comput. Aided Des. Appl. 2011, 8, 735–745. [Google Scholar]
- Li, X.; Zheng, J.; Sederberg, T.W.; Hughes, T.J.R.; Scott, M.A. On linear independence of T-spline blending functions. Comput. Aided Geom. Des. 2012, 29, 63–76. [Google Scholar] [CrossRef]
- Li, X.; Zhang, J. AS++ T-splines: Linear independence and approximation. Comput. Methods Appl. Mech. Eng. 2018, 333, 462–474. [Google Scholar] [CrossRef]
- Wang, A.; Zhao, G.; Li, Y. An influence-knot set based new local refinement algorithm for T-spline surfaces. Expert Syst. Appl. 2014, 41, 3915–3921. [Google Scholar] [CrossRef]
- Scott, M.A.; Li, X.; Sederberg, T.W.; Hughes, T.J. Local refinement of analysis-suitable T-splines. Comput. Methods Appl. Mech. Eng. 2012, 213, 206–222. [Google Scholar] [CrossRef]
- Zhang, J.; Li, X. Local refinement for analysis-suitable++ T-splines. Comput. Methods Appl. Mech. Eng. 2018, 342, 32–45. [Google Scholar] [CrossRef]
- Chen, L.; De Borst, R. Adaptive refinement of hierarchical T-splines. Comput. Methods Appl. Mech. Eng. 2018, 337, 220–245. [Google Scholar] [CrossRef]
- Wang, A.; Zhao, G. An algorithm of determining T-spline classification. Expert Syst. Appl. 2013, 40, 7280–7284. [Google Scholar] [CrossRef]
- Singh, S.K.; Singh, I.V.; Mishra, B.K.; Bhardwaj, G.; Bui, T.Q. A simple, efficient and accurate Bézier extraction based T-spline XIGA for crack simulations. Theor. Appl. Fract. Mech. 2017, 88, 74–96. [Google Scholar] [CrossRef]
- Zhu, Y.; Han, X. C2 interpolation T-splines. Comput. Methods Appl. Mech. Eng. 2020, 362, 112835. [Google Scholar] [CrossRef]
- Hughes, T.J.; Cottrell, J.A.; Bazilevs, Y. Isogeometric analysis: CAD, finite elements, NURBS, exact geometry and mesh refinement. Comput. Methods Appl. Mech. Eng. 2005, 194, 4135–4195. [Google Scholar] [CrossRef]
- Bazilevs, Y.; Calo, V.M.; Cottrell, J.A.; Evans, J.A.; Hughes, T.J.R.; Lipton, S.; Scott, M.A.; Sederberg, T.W. Isogeometric analysis using T-splines. Comput. Methods Appl. Mech. Eng. 2010, 199, 229–263. [Google Scholar] [CrossRef]
- Cottrell, J.; Hughes, T.J.R.; Bazilevs, Y. Isogeometric Analysis: Toward Integration of CAD and FEA; John Wiley & Sons, Ltd.: Hoboken, NJ, USA, 2009. [Google Scholar]
- Casquero, H.; Liu, L.; Zhang, Y.; Reali, A.; Kiendl, J.; Gomez, H. Arbitrary-degree T-splines for isogeometric analysis of fully nonlinear Kirchhoff–Love shells. Comput. Aided Des. 2017, 82, 140–153. [Google Scholar] [CrossRef]
- Liu, Z.; Cheng, J.; Yang, M.; Yuan, P.; Qiu, C.; Gao, W.; Tan, J. Isogeometric analysis of large thin shell structures based on weak coupling of substructures with unstructured T-splines patches. Adv. Eng. Softw. 2019, 135, 102692. [Google Scholar] [CrossRef]
- Chouliaras, S.P.; Kaklis, P.D.; Kostas, K.V.; Ginnis, A.I.; Politis, C.G. An Isogeometric Boundary Element Method for 3D lifting flows using T-splines. Comput. Methods Appl. Mech. Eng. 2021, 373, 113556. [Google Scholar] [CrossRef]
















Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, A.; Zhao, G.; He, C. Unified Representation of Curves and Surfaces. Mathematics 2021, 9, 1019. https://doi.org/10.3390/math9091019
Wang A, Zhao G, He C. Unified Representation of Curves and Surfaces. Mathematics. 2021; 9(9):1019. https://doi.org/10.3390/math9091019
Chicago/Turabian StyleWang, Aizeng, Gang Zhao, and Chuan He. 2021. "Unified Representation of Curves and Surfaces" Mathematics 9, no. 9: 1019. https://doi.org/10.3390/math9091019
APA StyleWang, A., Zhao, G., & He, C. (2021). Unified Representation of Curves and Surfaces. Mathematics, 9(9), 1019. https://doi.org/10.3390/math9091019