1. Introduction
Because of the impreciseness and randomness of the parameters involved in the different kinds of day-to-day real-life problems (especially decision-making problems), solving the decision-making problems under uncertainty is more challenging for academicians, system analysts, and engineers. Over the last few decades, researchers are trying to cope with these problems by introducing several techniques. Generally, parameter’s impreciseness is coped up by taking the imprecise parameter as either a random variable following a proper distribution function or a fuzzy set (a set whose elements have different membership/indicator values, unlike the ordinary sets). The elements of an ordinary set have only two membership values, either 0 or 1. Thus, a fuzzy set is identified by a membership function whereas the characteristic function or interval identifies the crisp set. Based on the impreciseness of various parameters of an optimization problem, several researchers categorized the optimization problem into the following four types:
- ➢
crisp optimization problem
- ➢
stochastic optimization problem
- ➢
Ø fuzzy-valued optimization problem
- ➢
interval-valued optimization problem
A crisp optimization problem is an optimization problem in which the objective function and all the constraints are real valued functions and the associated decision variables belong to a crisp set (a set in which each element has bi-valued membership, i.e., 0 or 1 be the membership value of each element of the set). Simply to state, in a crisp optimization problem, no parameter involved in the objective function and constrained are uncertain or vague—each parameter is deterministic in nature. From this point of view, all traditional optimization problems are crisp. In stochastic optimization, either the objective function or constraints or both are considered as random variables following the proper distribution function. In the area of stochastic optimization, researchers like Birge and Louveaux [
1], Vajda [
2], Clempner [
3], Xie et al. [
4], and Akbari-Dibavar et al. [
5] introduced several practical techniques to solve stochastic multi-objective decision-making problems. On the other side, in the fuzzy optimization problem, the type of objective function is fuzzy-valued, and all the involved constraints are taken as either fuzzy-valued or crisp (real-valued). Furthermore, Delgado et al. [
6] proposed an advanced optimization technique of fuzzy optimization. Rommelfanger and Slowiński [
7] established the methodologies for solving fuzzy linear programming with multiple objective functions. Panigrahi et al. [
8] introduced the fuzzy convexity of a function and derived the fuzzy optimization problem’s optimality condition. Recently, Bao and Bai [
9], Song and Wu [
10], Nagoorgani and Sudha [
11], and others established interesting research works on fuzzy optimization. Alternatively, in the interval optimization problem, the objective function is in the form of intervals. In constrained interval optimization problems with an interval-valued objective, the constraints may be interval-valued or real-valued. In the area of interval optimization, several researchers proposed their works on the theory of interval optimization. Among them, some worth-mentioning works are mentioned here. Wu [
12] established the Karush-Kuhn-Tucker (KKT) conditions of a nonlinear interval-valued constrained optimization problem with crisp-type constraints. He used the Ishibuchi and Tanaka’s [
13] partial interval order relations and the gH-differentiability (Stefanin and Bede [
14]) to derive the optimality conditions. On the other side, using interval arithmetic, Maqui-Huamán et al. [
15] derived the necessary optimality conditions of an interval optimization problem with inequality constraints. Cartis et al. [
16] used the scaled KKT conditions to determine the bounds of complexity of a smooth constrained optimization problem. Bazargan and Mohebi [
17] proposed a new constraints qualification for convex optimization and Ghosh et al. [
18] applied the generalized Hukuhara and Frechet differences in the area of interval optimization. However, to enrich the concept of interval optimization, Treanta [
19,
20,
21,
22] introduced several concepts on the different branches of interval optimization field viz. constrained interval-valued optimization, interval-valued variational control, and saddle-point optimality problems. Rahman et al. [
23,
24] also established the extended Karush-Kuhn-Tucker (KKT) conditions and saddle point optimality criteria for a constrained interval-valued optimization problem.
However, in several real-life situations, expressing the imprecise parameters involved in various real-life problems as intervals by selecting both the lower and the upper bound can be quite difficult. As an example, the cost of various commodities is usually expressed by the interval with deterministic bounds. However, sometimes when dealing with these situations, one has to face two major unavoidable challenges for selecting the bounds. In the first case, it is observed that some data on the commodity costs might exceed the bounds of the interval. Furthermore, secondly, it can also be noticed that the data of the cost never attain either of the bounds. If we do not overcome these challenges, the optimal solutions to the related problems under such a situation either contain a significant error or deal with considerable uncertainty, which is not an optimistic decision maker’s principle. To tackle these challenges, recently, Rahman et al. [
25,
26] introduced an essential generalization of the regular interval, called Type-2 interval. In the generalization of an interval, the certainty of both of the bounds was replaced by some kind of flexibility. In the new generalized type of interval, each of its bound is lying in two different ordinary intervals—one for the upper bound and another for the lower bound. Thus, according to Rahman et al. [
26], a Type-2 interval can be defined mathematically in the form
, where
and
. This Type-2 interval is represented as
. If the objective function or constraints or both of a nonlinear optimization problem are Type-2 interval-valued, then the corresponding optimization problem is called Type-2 interval-valued optimization problem.
For the first time in the proposed work, the optimality conditions (both necessary and sufficient) for Type-2 interval-valued constrained and unconstrained optimization problems are derived. Initially, we have introduced the Type-2 interval mathematics and order relation. After that, the theory of optimality conditions of Type-2 interval-valued unconstrained optimization problem is discussed. Furthermore, in the successive sections, we have elaborated a discussion on the constrained interval optimization problem. In the case of the constrained interval optimization problem, the optimality conditions are derived for three possible cases, viz. (i) Type-2 interval-valued objective and real-valued constraints, (ii) Type-2 interval-valued objective and Type-1 interval-valued (usual interval) constraints, and (iii) Type-2 interval-valued objective function and constraints. Finally, all the theoretical results are illustrated with some numerical examples.
2. Preliminaries
2.1. Basic Concepts of Nonlinear Crisp Optimization
Let us suppose a constrained nonlinear crisp optimization problem of the following form:
Here is the objective function, , () are the inequality constraint functions, and is a convex set. Assume that all functions are continuously differentiable at a point . If is a local optimum and it satisfies regularity conditions (also called constraint qualification), then there exist constants , ), such that must satisfy the following stationary, primal feasibility (a point satisfies the primal feasibility means it satisfies all the constraints of the corresponding constrained nonlinear optimization problem), complementary slackness (it is a condition in an inequality constraint which is converted into equality constraints by multiplying non-negative real number), and dual feasibility conditions (the non-negativity condition of the multiplier used in the complementary slackness condition is called dual feasibility):
- (4)
Complementary slackness:
for
The conditions (1) to (4) are called KKT-conditions, and
,
are the KKT-multipliers. Karush [
27] first introduced these conditions in the year 1939, and later these conditions were derived independently by Kuhn and Tucker [
28] in the year 1951.
If the functions and are convex, then necessary KKT conditions are also sufficient conditions for optimality.
2.2. Basic Concepts of Nonlinear Interval Optimization
The canonical form of an interval optimization problem is given as follows:
where
Here all are continuously differentiable, and the inequality sign in the alternative constraints is the symbol of interval order relation (Definition 1), not the ordinary inequality sign. If is a local optimum and satisfies regularity conditions (also called constraint qualification), then there exist constants , ), such that:
Case-A: when
, then
satisfies the conditions
Case-B: when , where first k number of constraints are with non-constant centers and remaining m-k constraints are with constant centers.
Then
satisfies the conditions:
2.3. Basic Concepts of Type-2 Interval
We are already familiar with the concept of a closed bounded interval or a simply interval. In the interval, there are two fixed bounds: one is for the lower and another for the upper end of the range. Any fluctuating parameters of real-life problems (costs of different commodities, temperature of a day, normal pressure of a human body, etc.) are represented by the intervals. However, sometimes, we face difficulties to select both the bounds in the representation of interval forms of such fluctuating parameters due to the uncertainty. To cope with the difficulties of selecting the bounds of an interval, Rahman et al. [
26] generalized the interval’s concept by taking the flexibilities of both interval bounds instead of fixed bounds. In the new generalized type of interval, each of the bounds is lying in two different ordinary intervals—one for the upper bound and another for the lower bound. This new generalized type of interval is called Type-2 interval, whereas the ordinary interval is called Type-1 interval. The formal definition of Type-2 interval is given in Definition 1.
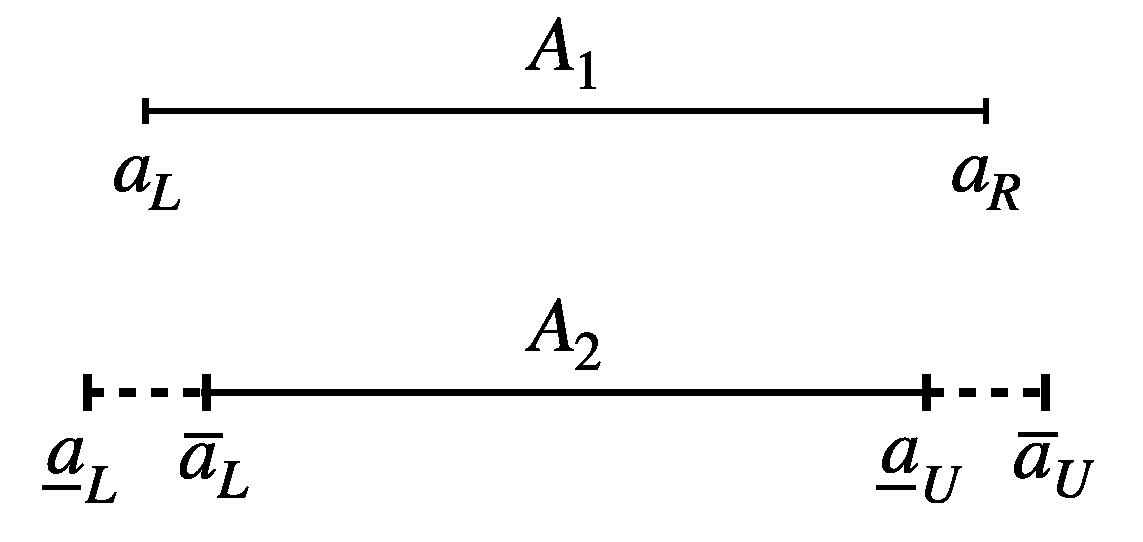
Definition 2. The Type-2 interval is denoted byand defined in the form of Type-1 intervals given as Comparison of Type-1 and Type-2 interval:
Let be a Type-2 interval. From the definition of the Type-2 interval, any element of is of the form Type-1 interval . Thus, a Type-1 interval is a member of a Type-2 interval. From the definition, it is observed that the elements (Type-1 intervals) of with the largest and smallest widths are , respectively.
For example, let . Then, the largest element of is and the smallest one is Another intermediate element is
A generic Type-2 interval
and a Type-1 interval
are shown graphically in
Figure 1.
Definition 3. Supposeare two Type-2 intervals. Now,iff
Definition 4. Letbe two Type-2 intervals. Then, the fundamental arithmetic operations between A and B are defined as follows:
- (iii)
Scalar multiplication:
3. Type-2 Interval Order Relation
In this section, the order relation of two Type-2 intervals is defined and, to justify its validity, two numerical examples are considered.
Definition 5. Letbe a Type-2 interval. Then, a set of score functions of A which uniquely determines A is defined as,
Definition 6. Letbe two Type-2 intervals with corresponding sets of score functions, respectively.
Definition 7. Letbe two Type-2 intervals. Then
Example 1. Compare the following pairs of Type-2 intervals by using Definition 6.
Solution:
- (i)
Here, .
Since , using Definition 6, we can say that .
- (ii)
Here, .
Since and using Definition 6, we can say that .
4. Optimality of Unconstrained Type-2 Interval-Valued Optimization Problem
Let
and
be a Type-2 interval-valued function given by
Now the set of score functions of
is defined as
, where
Definition 8. The pointis called a local minimizer of the Type-2 interval-valued functionifwhereis an open ball centered atwith radiusandis the symbol of Type-2 interval order relation as defined in Definition 6.
Definition 9. The pointis called a global minimizer ofif.
Definition 10. The pointis called a local maximizer ofif
Definition 11. The pointis called a global maximizer ofif
Theorem 1 (Necessary Optimality Conditions). Letandbe a Type-2 interval-valued function defined byand all the elements of the set of score functionsare supposed to be differentiable, i.e.,exist. Then,be an optimizer of Type-2 interval-valued function, if Proof. Here, Theorem 1 is proved only for the minimization case. The maximization case can be proved similarly. Suppose is a local minimizer of . Now, the definition of local minimizer implies that ,
The earlier mentioned relations mean that
Thus,
is a local minimizer for
Then, according to the necessary optimality conditions for crisp minimization problem with real-valued objectives,
we get
□
Definition 12. Letbe a twice differentiable crisp function. Then, the Hessian matrixis defined by thematrix whose entries are the second-order partial derivatives, i.e.,
Theorem 2 (Sufficient Conditions). Letbe given in the form.
Supposeis such that each element of the set of score functionsofis differentiable and satisfies the following conditions: (i) Then,is a local minimizer ofif (ii)is local maximizer ofif Proof. (i) To prove Theorem 2 (i), four cases may arise:
Case-I: when
with
is positive definite at
. Then, from the sufficient optimality condition for real-valued function,
we have
where
is an open ball whose center is at
with radius
Case-II: when with
is positive definite at
.
Similarly,
Case-III: when
with
is positive definite at
.
Case-IV:
when with
is positive definite at .
Now, combining all the cases (I–IV), we get
So, by the definition of order relation, we get
Therefore, is the local minimizer of .
(ii) Similarly, the proof of the maximization case can be obtained.
□
Example 2. Let us consider the following function for optimization. Solution:
Therefore, for maximization or minimization of , it is sufficient to minimize Clearly, (0, 0) is the minimizer of , and hence it is the minimizer of . Therefore, the minimum value of at is .
Example 3. Let us consider the following function for optimization: Therefore, the necessary conditions for optimality of
are given by
which implies
Hence the critical points of are
Clearly, is the positive definite matrix. Thus, is the local minimizer of and the minimum value of is
At , no definite conclusion has been made because, at these points, the strict definiteness of the Hessian matrix cannot be decided.
Definition 13. Letbe a Type-2 interval-valued function defined onwith X being convex. Then,is said to be convex on X iffor each
Proposition 1. Letbe convex andbe a Type-2 interval-valued function given by. Ifare convex, thenis convex.
5. Optimality Conditions of Constrained Type-2 Interval-Valued Optimization Problem
Let the general form of a nonlinearly constrained Type-2 interval-valued optimization problem be of the form:
where
The definition of the order relation is given in Definition 6.
The definition of interval order relation
was proposed by Bhunia and Samanta [
29], defined in Definition 1.
The set of score functions of
is
, where
and let
Definition 14. The pointis called a minimizer of the problem if , where is an open ball centered at
Optimality conditions:
Now, based on the nature of all constraints, , three cases may arise:
Case-1: when
is a Type-2 interval-valued function and all
are crisp functions (real-valued) having continuous partial derivatives up to the second order. In this case, the nonlinear Type-2 interval-valued constrained optimization problem along with inequality constraints can be expressed as follows:
Here each element of the set of score functions of is continuously differentiable, i.e., are continuously differentiable functions.
Necessary conditions:
Theorem 3. Supposeis a local minimizer of the constrained optimization problem (MP1) in which all the basic Type-2 interval-valued constraint qualifications hold. Then, there exist multiplierssubject to the following conditions: Proof. First of all, we have introduced the non-negative slack variable in the given inequality constraints (MP1), and we get the equality constraints .
Now, the corresponding Lagrange function of (MP1) is as follows:
Here
are the Lagrange multipliers. Now from the necessary conditions of the Type-2 interval-valued unconstrained optimization problem, we get
From Equation (9), we have
From Equation (11), we obtain
If and , then gives
This implies, either ,
Hence, we have obtained the required necessary conditions.
□
Note 1. These conditions are similar to the KKT conditions of the nonlinear crisp optimization problem derived by Karush [27], Kuhn and Tucker [28]. Thus, these conditions can be called generalized KKT conditions. Sufficient condition:
Theorem 4. Letsatisfy the conditions (5)–(8), and all the elements of the set of score functions ofare the differentiable and convex functions withas non-constant function. Thenis the global minimizer of the problem (MP1).
Proof. Since being continuously differentiable convex functions with satisfying the necessary conditions (5)–(8), then from the sufficient optimality conditions of the crisp function , it can be concluded that is a global minimizer of
That is, .
This implies, .
Thus, is a global minimizer of .
Case-2: when all
are interval-valued weakly differentiable functions, then the problem (
MP) can be rewritten as:
Without loss of generality, it is assumed that the first constraints have non-constant centers, and the remaining components of have constant centers,
Then, by using Bhunia and Samanta’s [
29] interval order relation, the constraints of the problem (MP2) can be rewritten as:
Here,
are the center and the radius of
, respectively. Thus, (MP2) can be rewritten as:
Now, using Case-1, the KKT conditions of the problem (MP2), i.e., of the (MP3) are derived as follows:
Case-3: let all
be Type-2 interval-valued and weakly continuously differentiable functions. In this case, the problem is reformulated in the following way:
Then, using the definition of Type-2 interval order relation, the problem (MP4) can be reformulated as:
where
are the set of score functions of
.
Now, using Case-1, the generalized conditions of (MP5) are derived as follows:
□
Example 4. Let us consider the Type-2 interval-valued minimization problem: Solution: Suppose
Here, .
Clearly,
are continuously differentiable and convex functions. Then, the generalized KKT conditions of (25) are
Clearly, satisfy the conditions (26)–(29). Therefore, is a global minimizer of (25).
Example 5. Let us consider a minimization problem for Case-2 as follows: Solution: Let
.
Clearly, all
are convex and continuously differentiable. Thus, the generalized KKT conditions for (30) are
Obviously, satisfy the conditions (31)–(34). Thus, is a global minimizer of (30).
Solution: Let , and
Clearly, are differentiable and convex functions.
Now, the generalized KKT conditions for the problem (35) are as follows:
From (36)–(39), we have . Thus, is a global minimizer of (35).
7. Concluding Remarks
In this work, both the necessary and sufficient optimality conditions for the nonlinear Type-2 interval-valued unconstrained optimization problem have been derived based on the proposed Type-2 interval order relation. Henceforth using these conditions, the optimality conditions of constrained optimization problems taking all the possible cases (Case-1 to Case-3) are derived. For Case-1, both the necessary and sufficient optimality conditions are discussed with detailed derivations. Simultaneously, in Case-2 and Case-3, only the necessary conditions are derived as the consequences of the Case-1. The necessary conditions derived in all three cases are named generalized KKT conditions.
For future investigation, one may extend the concepts of optimality in derivative-free optimization (saddle point optimality) and the optimality theory of variational problems in the Type-2 interval environment. The proposed work concepts may also be applied to solve real-life optimization problems, such as inventory problems, transportation problems, reliability optimization problems, and several other nonlinear optimization problems under Type-2 interval uncertainty. In the inventory model case, the classical inventory models can further be extended for the Type-2 interval environment using the proposed theoretical discussions incorporating deterioration, preservation, price dependent demand, price and stock dependent demand, overtime production, imperfect production process, etc.



 ,
, 



{kind=link}
{kind=link}