Abstract
This paper is concerned with complete synchronization of fractional-order chaotic systems with both model uncertainty and external disturbance. Firstly, we propose a new dynamic feedback control method for complete synchronization of fractional-order nominal systems (without both uncertainty and disturbance). Then, a new uncertainty and disturbance estimator (UDE)-based dynamic feedback control method for the fractional-order systems with both uncertainty and disturbance is presented, by which the synchronization problem of such fractional-order chaotic systems is realized. Finally, the fractional-order Lorenz system is used to demonstrate the practicability of the proposed results.
1. Introduction
As a branch of mathematical analysis, fractional calculus was proposed around the same time as Newton Leibniz’s integral calculus, and it can be traced back to 1695. After that, the fractional differential equations have been applied to describe many practical systems, such as circuits [1], viscoelastic beams [2,3], diffusion models [4,5], nonholonomic systems [6,7], chaotic systems [8,9,10,11,12,13] and so on. Additionally, many systems in reality have fractional-order dynamic behavior. Hence, fractional calculus has developed rapidly during the past few decades. As an important branch of fractional calculus, fractional-order systems are also widely used in many practical applications, such as signal processing, image processing, automatic control, robotics, etc.
Chaos is a kind of special nonlinear dynamic system which is highly sensitive to the change of parameters and initial conditions. Many integer-order chaotic systems exhibit fractional-order dynamic behavior, such as Lorenz [9], Chen [10,11], Rössler [12], Lü [13], etc., which are called fractional-order chaotic systems. The concept of chaos synchronization was first proposed by Pecora and Carroll in their 1990’s paper [14]. Since then, chaos synchronization is one of the important branches of chaos control and has great application potential in fields such as secure communication, signal encryption and fault diagnosis. In recent years, synchronization of fractional-order chaotic systems has attracted a lot of attention and various control methods have been proposed, such as adaptive control [15,16,17,18,19,20], passive control [21], active control [22], fuzzy control [23], sliding mode control [24], feedback control [25], and so forth. Simultaneously, many synchronization types of the fractional-order chaotic systems have been studied including complete synchronization [26,27], projective synchronization [28], lag synchronization [29], etc. Although scholars have made great achievements in the control of fractional-order chaotic systems, there are still many challenges and problems to be solved. For instance, there are too many combinations of controllers and control channels, and the control technology designed in [30,31,32,33,34] does not take the uncertainty of the system into account.
It is well known that chaotic systems are very sensitive to parameter disturbances and external disturbances. Therefore, it is difficult to realize synchronization of chaotic systems with parameter disturbances and external disturbances. Fortunately, there are some works in studying the synchronization problem of integer-order chaotic systems with parameter disturbances and external disturbances. But, there are some limitations in the research results of synchronization of chaotic systems with model uncertainties and external disturbances. For example, both model uncertainty and external disturbance are supposed to be bounded, and the bounds are usually small. Such as, . And, the method used is based on linear matrix inequalities (LMIs), thus the obtained result is too conservative in some cases. Recently, the UDE-based method has shown some advantages over the existing results, see [35,36,37,38]. Therefore, we shall investigate the synchronization problem of the fractional-order chaotic systems by extending the existing UDE-based control method.
Inspired by the above discussions, we focus on complete synchronization of the fractional-order chaotic systems with model uncertainty and external perturbation. A new UDE-based control method is proposed to realize the synchronization problem of such fractional-order chaotic systems. The rest of this paper is arranged as follows. Section 2 introduces the preliminary of fractional-order chaotic systems and problem formulation. In Section 3, main results of this paper are presented. In Section 4, an illustrative example is studied to show the correctness and effectiveness of the main results. The last section gives the conclusion.
2. Preliminaries and Problem Formation
2.1. Preliminaries
In this section, we give the definition and some preliminaries of fractional-order system which can be used in the next.
The derivative of -order Caputo is defined as
where , is a function which is defined by
Consider the following fractional-order nonlinear system
here is a state vector, is a continuous vector function.
Many properties of fractional-order calculus are introduced as follows.
Property 1
([39]). The fractional-order calculus defined by Caputo is a linear operator and satisfies
where are real constants.
Property 2
([40]). For fractional-order nonlinear system (1), meets the following Lipschitz condition:
where is an ∞-norm, L is a positive real number.
Property 3
([41]). Suppose that is a continuous and derivable function. Then, for and ,
For the stability problem of fractional-order nonlinear system, there are many theories to judge the stability of the system, but the Mittag–Leffler stability theory is most used.
Lemma 1
([42,43]). Assume that is the equilibrium point of system (1), and is the region containing the origin. If there exists a Lyapunov function satisfying the local Lipschitz condition with respect to x:
where , , , , , are class-κ functions, then the equilibrium point of system (1) is asymptotically stable.
2.2. Problem Formation
The fractional-order chaotic system with model uncertainty and external disturbance can be expressed as
where , is a concinnous nonlinear vector function, , is the model uncertainty, is the external disturbance, is the constant matrix, , and is the controller to be designed.
Suppose that system (2) is chosen as the drive system. Then the response system can be described as
where , is a concinnous nonlinear vector function.
In the following, our goal is to design a controller u satisfying the performance in the form of
3. Main Results
In this section, we investigate how to design a simple and physical controller u to satisfy (5), that is to say, the designed controller u can stabilize the error system (4).
Firstly, we study the stabilization of the error system (4) with and get the controller . A conclusion is obtained as follows.
Theorem 1.
Consider the error system (4) with . If can be stabilized, then the dynamic feedback controller is designed as
where , and the feedback gain is updated
and
Proof.
Define the following non-negative function:
where M is a sufficiently large constant and satisfied .
Calculating the Caputo derivative of V along the system in Equation (9), and using Property 1 and Property 3, we obtain that
In view of the error system (4) with , we conclude that
Combining Property 2 and the condition given in Equation (7), we get
Applying the condition of and using the following notation yield that
In the sequel, there are two cases for . As in the proof of Theorem 1 in [44], we get the desired conclusion that .
In the next, we investigate the stabilization of the error system (4) and present the following result.
Theorem 2.
Consider the error system (4). If can be stabilized and there exists a suitable filter such that
where
and satisfies the following structural constraints
is the identity matrix of order n, then the UDE-based controller u is designed as
where
, , , ℓ represents Laplace transform, represents Laplace inverse transform, * represents convolution, and the feedback is updated by
and
Proof.
which completes the proof. □
It is noted that
and the system is asymptotically stable according to Theorem 1.
According to condition given in Equation (12), if the controller meets the following equation
then this controller is proposed.
Furthermore, we obtain
that is
4. Numerical Simulations
Next, we take the famous fractional-order Lorenz system as an illustrative example to show our proposed results.
Example 1.
Consider the controlled fractional-order Lorenz system with both uncertainty and disturbance
where is the state, and , i.e.,
System (22) is chosen as the drive system, the corresponding response system is noted as
where is a state vector, and
The error dynamical system () is presented as
where is the state, and
In order to design the controller u, we firstly investigate complete synchronization of the following fractional-order nominal Lorenz system
where is the state, and are given in Equation (23), is the controller to be designed.
Suppose that system (28) is the drive system, the corresponding response system is in the form of (24). Let , then the nominal error system is
where is the state, B is given in Equation (23), is given in Equation (27), is given in Equation (28).
Note that if , then the following two-dimensional system
is asymptotically stable.
Therefore, can be stabilized. Based on Theorem 1, the controller can be designed as
where is defined in Equation (18).
Substituting the controller given in Equation (30) into the error system (29), the controlled error system is presented as follows
Numerical simulation is carried out by choosing the initial conditions of the drive system (28): , the initial conditions of the response system (24): , and , , . Figure 1 shows that the error system (29) is asymptotically stable, that is to say, the drive system (28) and the response system (24) realize complete synchronization. The states of the drive system (28) and the response system (24) are displayed in Figure 2, respectively. Figure 3 demonstrates converges to a constant.
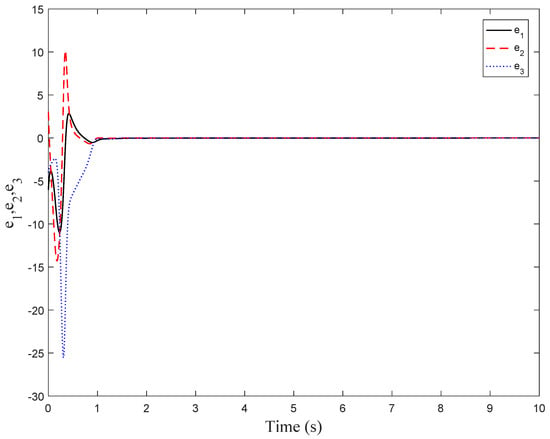
Figure 1.
The error system (29) is asymptotically stable.
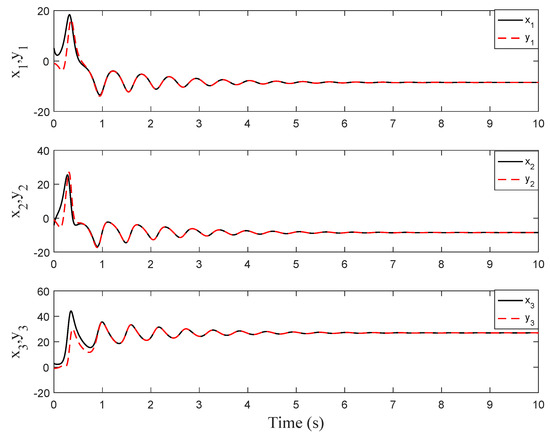
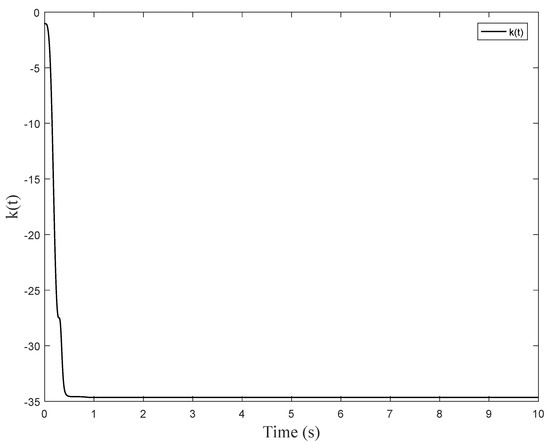
Figure 3.
tends to a constant.
Noticing that the structural constraint condition (14) is satisfied, according to Theorem 2, the controller is designed as
where the filter is proposed as
Therefore, the controlled Lorenz system is
Numerical simulation is done with the initial conditions of the drive system (22) and the response system (24): , , respectively, and , , . Figure 4 displays the synchronization error tends to zero, which implies that the drive system (22) and the response system (24) reach complete synchronization. Figure 5 demonstrates the states of the drive system (22) and the response system (24), respectively. Figure 6 represents that the feedback gain tends to a constant. From Figure 7, it is clear that converges asymptotically to .
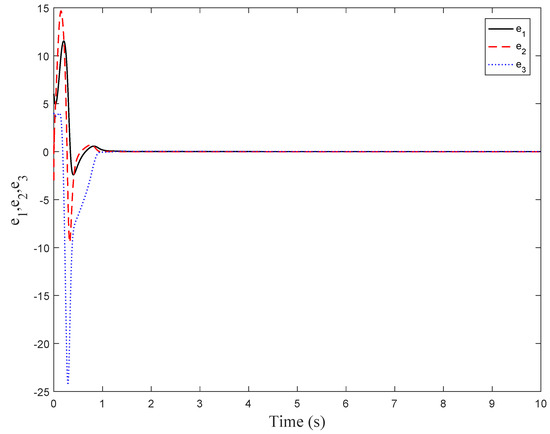
Figure 4.
The error system (26) is asymptotically stable.
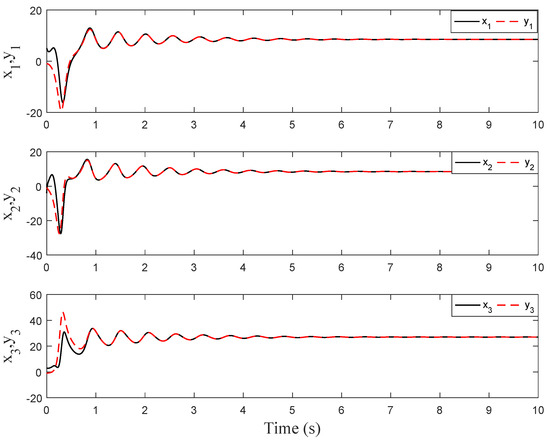
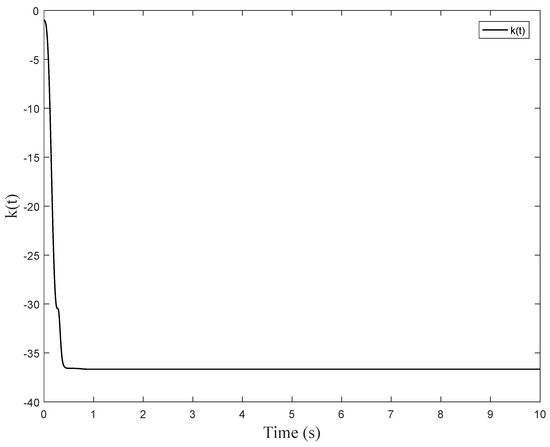
Figure 6.
tends to a constant.
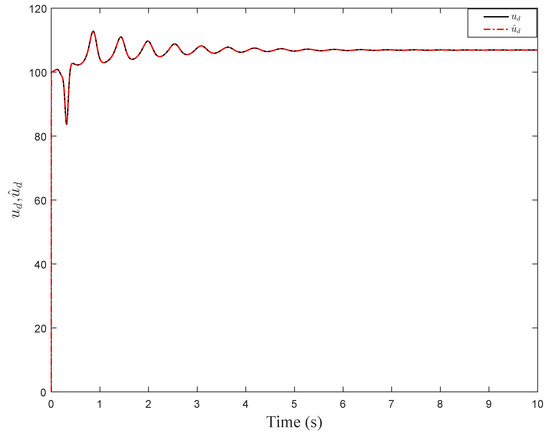
Figure 7.
converges asymptotically to .
5. Conclusions
This paper has investigated complete synchronization of the fractional-order systems with both model uncertainty and external disturbance. Based on the fractional-order nominal systems, we propose a new dynamic feedback control method. Then, a new UDE-based control method for the fractional-order system has been obtained by extending the existing UDE-based control method. Finally, complete synchronization of the fractional-order chaotic systems has been realized by the above method, and an illustrative example has been used to show the practicability of the obtained results. The simulation results have shown that the UDE-based dynamic feedback control method has good performance.
Author Contributions
Y.Z. writes the original draft preparation, C.J. and R.G. review and edit the whole paper. All authors have read and agreed to the published version of the manuscript.
Funding
This work was supported by Natural Science Foundation of Shandong Province (Grant No. ZR2018MF016), Scientific Research Plan of Universities in Shandong Province (Grant No. J18KA352) and Young doctorate Cooperation Fund Project of Qilu University of Technology (Shandong Academy of Sciences) (No.2019BSHZ0014).
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
The data can be found in the manuscript.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Luo, Y.; Chen, Y.; Pi, Y. Experimental study of fractional order proportional derivative controller synthesis for fractional order systems. Mechatronics 2011, 21, 204–214. [Google Scholar] [CrossRef]
- Liu, D.; Xu, W.; Xu, Y. Stochastic response of an axially moving viscoelastic beam with fractional order constitutive relation and random excitations. Acta Mech. Sin. 2013, 29, 443–451. [Google Scholar] [CrossRef]
- Gladkov, S. On mathematical description of crystallization as a deterministic chaos problem. Tech. Phys. 2008, 53, 952–955. [Google Scholar] [CrossRef]
- Sun, H.; Chen, W.; Li, C.; Chen, Y. Finite difference schemes for variable-order time fractional diffusion equation. Int. J. Bifurc. Chaos 2012, 22, 1–16. [Google Scholar] [CrossRef]
- Gladkov, S.; Bogdanova, S. The heat-transfer theory for quasi-n-dimensional system. Physica B 2010, 405, 1973–1975. [Google Scholar] [CrossRef]
- Sharma, D.; Narayan, S.; Kaur, S. Finite time fractional-order sliding mode-based tracking for a class of fractional-order nonholonomic chained system. J. Comput. Nonlinear Dyn. 2018, 13, 1–23. [Google Scholar]
- Sharma, D.; Kaur, S.; Narayan, S. Fractional order uncertainty estimator based hierarchical sliding mode design for a class of fractional order non-holonomic chained system. ISA Trans. 2018, 77, 58–70. [Google Scholar]
- Xu, Y.; Liu, Q.; Guo, G.; Xu, C.; Liu, D. Dynamical responses of airfoil models with harmonic excitation under uncertain disturbance. Nonlinear Dyn. 2017, 89, 1579–1590. [Google Scholar] [CrossRef]
- Yu, Y.; Li, H.; Wang, S.; Yu, J. Dynamic analysis of a fractional-order Lorenz chaotic system. Chaos Solitons Fractals 2009, 42, 1181–1189. [Google Scholar] [CrossRef]
- Lu, J.; Chen, G. A note on the fractional-order Chen system. Chaos Solitons Fractals 2006, 27, 685–688. [Google Scholar] [CrossRef]
- Wang, B.; Li, L.; Wang, Y. An efficient nonstandard finite difference scheme for chaotic fractional-order Chen system. IEEE Access 2020, 8, 98410–98421. [Google Scholar] [CrossRef]
- Li, C.; Chen, G. Chaos and hyperchaos in the fractional-order Rössler equations. Phys. A Stat. Mech. Appl. 2004, 341, 55–61. [Google Scholar] [CrossRef]
- Lu, J. Chaotic dynamics of the fractional-order Lü system and its synchronization. Phys. Lett. A 2006, 354, 305–311. [Google Scholar] [CrossRef]
- Pecora, L.M.; Carroll, T.L. Synchronization in chaotic system. Phys. Rev. Lett. 1990, 64, 821–825. [Google Scholar] [CrossRef]
- Liu, H.; Chen, Y.; Li, G.; Xiang, W.; Xu, G. Adaptive fuzzy synchronization of fractional-order chaotic (hyperchaotic) systems with input saturation and unknown parameters. Complexity 2017, 2017, 1–16. [Google Scholar] [CrossRef]
- Yan, B.; He, S.; Wang, S. Multistability in a fractional-order centrifugal flywheel governor system and its adaptive control. Complexity 2020, 2020, 1–11. [Google Scholar]
- Yin, C.; Dadras, S.; Zhong, S.; Chen, Y. Control of a novel class of fractional-order chaotic systems via adaptive sliding mode control approach. Appl. Math. Model. 2013, 37, 2469–2483. [Google Scholar] [CrossRef]
- Zhang, R.; Yang, S. Adaptive synchronization of fractional-order chaotic systems via a single driving variable. Nonlinear Dyn. 2011, 66, 831–837. [Google Scholar] [CrossRef]
- Park, J.H. Adaptive synchronization of Rössler system with uncertain parameters. Chaos Solitons Fractals 2005, 25, 333–338. [Google Scholar] [CrossRef]
- Karimov, A.; Tutueva, A.; Karimov, T.; Druzhina, O.; Butusov, D. Adaptive generalized synchronization between circuit and computer implementations of the Rössler system. Appl. Sci. 2021, 11, 81. [Google Scholar]
- Kuntanapreeda, S. Adaptive control of fractional-order unified chaotic systems using a passivity-based control approach. Nonlinear Dyn. 2016, 84, 2505–2515. [Google Scholar] [CrossRef]
- Bhalekar, S.; Daftardar-Gejji, V. Synchronization of different fractional order chaotic systems using active control. Commun. Nonlinear Sci. Numer. Simul. 2010, 15, 3536–3546. [Google Scholar] [CrossRef]
- Wang, R.; Zhang, Y.; Chen, Y.; Chen, X.; Xi, L. Fuzzy neural network-based chaos synchronization for a class of fractional-order chaotic systems: An adaptive sliding mode control approach. Nonlinear Dyn. 2020, 100, 1275–1287. [Google Scholar] [CrossRef]
- Aghababa, M.P. Robust stabilization and synchronization of a class of fractional-order chaotic systems via a novel fractional sliding mode controller. Commun. Nonlinear Sci. Numer. Simul. 2012, 17, 2670–2681. [Google Scholar] [CrossRef]
- Pan, L.; Zhou, W.; Zhou, L.; Sun, K. Chaos synchronization between two different fractional-order hyperchaotic systems. Commun. Nonlinear Sci. Numer. Simul. 2011, 16, 2628–2640. [Google Scholar] [CrossRef]
- Jiang, C.; Zada, A.; Şenel, M.T.; Li, T. Synchronization of bidirectional N-coupled fractional-order chaotic systems with ring connection based on antisymmetric structure. Adv. Differ. Equ. 2019, 2019, 1–16. [Google Scholar] [CrossRef]
- Jiang, C.; Zhang, F.; Li, T. Synchronization and anti-synchronization of N-coupled fractional-order complex systems with ring connection. Math. Methods Appl. Sci. 2018, 41, 2625–2638. [Google Scholar] [CrossRef]
- Yang, L.; Jiang, J. Complex dynamical behavior and modified projective synchronization in fractional-order hyper-chaotic complex Lü system. Chaos Solitons Fractals 2015, 78, 267–276. [Google Scholar] [CrossRef]
- Zhang, W.; Cao, J.; Wu, R.; Alsaadi, F.E.; Alsaedi, A. Lag projective synchronization of fractional-order delayed chaotic systems. J. Frankl. Inst. 2019, 356, 1522–1534. [Google Scholar] [CrossRef]
- Li, C.; Deng, W. Chaos synchronization of fractional-order differential systems. Int. J. Mod. Phys. B 2006, 20, 791–803. [Google Scholar] [CrossRef]
- Xu, Y.; Wang, H. Synchronization of fractional-order chaotic systems with Gaussian fluctuation by sliding mode control. Abstr. Appl. Anal. 2013, 2013, 1–7. [Google Scholar]
- Wang, Q.; Qi, D. Synchronization for fractional order chaotic systems with uncertain parameters. Int. J. Control. Autom. Syst. 2016, 14, 211–216. [Google Scholar] [CrossRef]
- Wu, Y.; Wang, G. Synchronization between fractional-order and integer-order hyperchaotic systems via sliding mode controller. J. Appl. Math. 2013, 2013, 1–5. [Google Scholar] [CrossRef]
- Hou, T.; Liu, Y.; Deng, F. Finite horizon H2/H∞ control for SDEs with infinite Markovian jumps. Nonlinear Anal. Hybrid Syst. 2019, 34, 108–120. [Google Scholar] [CrossRef]
- Ren, B.; Zhong, Q.; Chen, J. Robust control for a class of nonaffine nonlinear systems based on the uncertainty and disturbance estimator. IEEE Trans. Ind. Electron. 2015, 62, 5881–5888. [Google Scholar] [CrossRef]
- Yi, X.; Guo, R.; Qi, Y. Stabilization of chaotic systems with both uncertainty and disturbance by the UDE-Based Control Method. IEEE Access 2020, 8, 62471–62477. [Google Scholar] [CrossRef]
- Liu, L.; Li, B.; Guo, R. Consensus control for networked manipulators with switched parameters and topologies. IEEE Access 2021, 9, 9209–9217. [Google Scholar] [CrossRef]
- Peng, R.; Jiang, C.; Guo, R. Stabilization of a class of fractional order systems with both uncertainty and disturbance. IEEE Access 2021, 9, 42697–42706. [Google Scholar] [CrossRef]
- Gorenflo, R.; Mainardi, F. Fractional calculus: Integral and differential equations of fractional order. Mathematics 2008, 49, 277–290. [Google Scholar]
- Guo, R. A simple adaptive controller for chaos and hyperchaos synchronization. Phys. Lett. A 2008, 372, 5593–5597. [Google Scholar] [CrossRef]
- Aguila-Camacho, N.; Duarte-Mermoud, M.A.; Gallegos, J.A. Lyapunov functions for fractional order systems. Commun. Nonlinear Sci. Numer. Simul. 2014, 19, 2951–2957. [Google Scholar] [CrossRef]
- Li, Y.; Chen, Y.; Podlubny, I. Mittag-Leffler stability of fractional order nonlinear dynamic systems. Automatica 2009, 45, 1965–1969. [Google Scholar] [CrossRef]
- Li, Y.; Chen, Y.; Podlubny, I. Stability of fractional-order nonlinear dynamic systems: Lyapunov direct method and generalized Mittag-Leffler stability. Comput. Math. Appl. 2010, 59, 1810–1821. [Google Scholar] [CrossRef]
- Li, H.; Jiang, H.; Cao, J. Global synchronization of fractional-order quaternion-valued neural networks with leakage and discrete delays. Neurocomputing 2020, 385, 211–219. [Google Scholar] [CrossRef]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).