Here, an approach, Algorithm 1, is presented to generate initial gridshells. Then, we describe the genetic algorithm (GA) and particle swarm optimization (PSO) technique briefly for making it more convenient to read this work without having previous knowledge of these methods. Next, two indexes are introduced for making the gridshells’ regularity quantifiable, and finally the mathematical model of the problem is provided.
2.1. Generating An Initial Gridshell
There are several different approaches in the literature to generate an initial form of gridshell. Bouhaya et al. [
1] used the compass method which is a geometric approach and allows creating a network of parallelograms on any surface. The authors then coupled the compass method with genetic algorithms to propose an optimization approach. In optimization of the cable-braced grid shells, Feng et al. [
5] created the initial forms by translating the generatrix and directrix which allows the mesh to be parallelogram. The authors then proposed an optimization technique based on the usage of generatrix and directrix. Wang et al. [
16] formed the surface model by using NURBS (non-uniform rational B-splines), then generated a set of uniformly distributed random points on the surface, and finally connected the points by using Delaunay-based triangularization to generate an initial triangular gridshell.
It is noted that usually the proposed optimization methods in the literature are based on some generating techniques for the initial form. However, the focus of this work is on the regularity improvement of a given gridshell without taking into account how the initial form is obtained, and hence the presented techniques here can be used for improving the regularity of any given initial form of a gridshell which is given as two sets. A set with the (Cartesian) coordinates of nodes (or vertices), which is denoted by V here, and another set which shows the faces in the grid and is denoted by F here. In fact, F is a matrix, each row of which states which vertices form the corresponding face (or grid cell). Having the set V of the initial gridshell, the proposed approach here can be employed to improve the regularity of the gridshell by bettering the positions of the nodes without making any change in the matrix F. Moreover, one can add some restrictions such as fixing the position of some nodes to the improvement process.
In this work, for convenience and not being involved in the complication of generating the initial gridshells which is not of our focus, it is assumed that the given gridshell is based on a surface F(x, y, z) = 0. In this way, to keep the nodes (vertices) on the desired surface, the improvement process is made on the first two coordinates of the vertices, i.e., x and y, and the third coordinate is always obtained by using the surface equation. Any way, we observe that the detailed approach here can be employed for any given initial gridshell.
Another aspect to notice is that although gridshells with the triangular to hexagonal grid cells have been studied in the literature, triangular grids are the most widely used in reality as they can describe any free-form shape [
16]. In addition, as the triangular gridshells have less economic advantages in construction than the equivalent structures built of quadrilateral grids, many researchers have studied quadrangular gridshells [
5]. As a result, one can say that triangular and quadrangular gridshells are the most important cases, and hence the focus of this work is on these two groups of gridshells.
Given a surface F (x, y, z) = 0, to build an initial gridshell, usually some uniformly distributed random points are generated on the surface and then those points are connected to construct the triangular or quadrangular grid cells. However, as our main object here is to improve the regularity of the initial gridshells, we consider the equidistant points on the surface at the beginning which is the most regular initial case, and then we see that it can be still improved by using our introduced indexes. After generating the equidistant points on the surface, we use a very nice function in MATLAB, i.e., surf2patch(), to transform the coordinates (x, y, z) to two matrices V and F. However, it is possible to have duplicate vertices in V as any vertex in a grid cell may belong to some other cells as well. Hence, there may also be some duplicativeness in matrix F which should be removed.
This way, we present the following algorithm which generates both triangular and quadrangular initial gridshells (matrices F, faces, and V, vertices) for any given surface F(x, y, z) = 0.
Some explanations are given in
Appendix A Section on the used MATLAB functions and commands in Algorithm 1. We note that Algorithm 1 works with any generated set of points in Step 1 including the uniformly distributed random points or the equidistant points on the surface. However, in our usage of this algorithm, we generate the equidistant points on x−axis and y−axis (and then the third coordinates of the points are determined by using the given surface F(x, y, z) = 0) rather than the randomly generated points. This is only to have the most regular initial gridshell.
| Algorithm 1. Generating initial triangular or quadrangular gridshells (matrices F and V) for a given surface F(x, y, z) = 0 with some specified domain (in MATLAB) |
| Step 1. Generating some points on the surface in the domain. This way, we obtain three matrices X, Y, and Z including the coordinates of the points. Set ind (0 for triangular or 1 for quadrangular case). |
Step 2. Determine the matrices F, faces, and V, vertices, as follows. if ind [F, V] = surf2patch(X, Y, Z) else, [F, V] = surf2patch(X, Y, Z, ‘triangles’).
|
| Step 3. Remove the redundant vertices in matrices F and V as follows. |
| [V, ∼, I] = unique (V, ‘rows’); |
| F = I(F); |
2.2. Genetic Algorithm
Here, we explain briefly the genetic algorithm (GA) to eliminate the need for previous knowledge of this technique for the readers. The genetic algorithm (GA) is an iterative search method which relies on bio-inspired operators such as selection, crossover, and mutation. This technique was developed by Holland [
29] and contains six main stages explained below. It is noted that our main aim is not proposing an improved GA or tuning the best parameters of GAs on the desired problems but rather is to show how this technique can be employed to improve the gridshells’ regularity by using our introduced indexes in MATLAB. By the way, we tested some of the very common values for the parameters in GA taken from the literature, and then considered the best ones in our primary generated numerical results.
(1) Generating an initial population: Based on Darwinism, in this technique it is always assumed that there is an initial population of individuals which can change partially in each generation (iteration in the algorithm) according to the fitness (or cost) function. In fact, in each iteration the weak individuals are normally removed and instead some new stronger offspring are added to the population according to the crossover and mutation processes. We note that the number of individuals in each generation are the same as the number of individuals in the initial population. To generate an initial population, usually some random solutions are generated within a certain reasonable domain. Moreover, each solution, which is a member of the initial population, should be represented as a string (vector or matrix), which is called chromosome in this technique.
It is noted that although both matrices F and V are required to draw (or drive) the desired gridshells, the matrix F does not change during the improvement process, and we only need to improve the nodal positions according to the desired cost function. Hence, only the matrix V is improved. Moreover, with the first two coordinates of each vertex, i.e., x and y, the third coordinate can be obtained by using the given surface, that is F (x, y, z) = 0. Therefore, in this work, the first two columns of the initially generated matrix V are considered as a basic solution and denoted by Vnew. Then, a population of Npop individuals is randomly generated between Vnew − t and Vnew + t as the initial population, where t is a tolerance. As the initially generated matrix F, which shows the faces in the gridshell, does not change in the improvement process, the same matrix is used to evaluate every individual in the population.
(2) Evaluating each solution: An important part in every improvement process is determining the fitness function (in the case of maximizing) or cost function (in the case of minimizing), and then adopting it to the process. After generating the initial population, every individual is evaluated. The newly obtained solutions in crossover and mutation processes are also evaluated.
Then, usually in the merging stage, all the solutions are sorted and the weak ones are removed. Here, the cost function is considered as one of the presented indexes or their combination. More details on the cost function in our work is given in
Section 2.5.
(3) Parent selection: In genetic algorithm, two current solutions (called parents) are selected in order to create two new solutions (called offspring or children) in crossover stage. There are various methods to select parents among which the random selection, tournament selection, and roulette wheel selection are the most used [
30,
31,
32]. Here, we use the roulette wheel selection method. For improving this method, we first generate a vector of probability, i.e., P = (p
1, ···, p
Npop), based on the Boltzmann selection technique [
33,
34] and using a selection pressure β as follows.
where C is the vector of the solutions’ costs and
is the cost of the worst solution in the current population. According to experimental results, to improve the convergence of GA technique, for each problem, we set the selection pressure β so that the summation of the first half of components in probability vector P stays between 0.7 and 0.8. This way, we obtain some probabilities whose summation is 1. Calculating the accumulated vector and generating a random number from zero to 1, the first component in the accumulated vector which is equal to or greater than this random number gives the desired parent. The crossover percentage in GA is usually considered between 0.5 and 1 [
31]. Here, it is set to pc = 0.8. It is noted that in our primary numerical experiments on desired problems here, changing the crossover percentage from 0.7 to 0.9 led to a negligible change in the final results, and so the average of pc = 0.8 is considered. Therefore, as the number of parents should be even, in each iteration N
c = 2 × [pc × N
pop/2] parents are selected and the same number of offspring (children) are generated, where [•] is the nearest integer number to •.
(4) Crossover: This is an important operator in GA which mimics mating in biological populations. It propagates the good features from the current population to the next one leading to better fitness (or cost) value on average. There are several strategies to do the crossover including single point, double-point, uniform, and arithmetic crossover. Here, as the points can move continuously on the surface, we use the arithmetic crossover. In this way, we first generate a vector α of random numbers from the continuous uniform distribution, and then considering X1 and X2, the new children Y1 and Y2 are generated as follows.
(5) Mutation: This operator allows for global search of the solution’s space, promoting the diversity in population characteristics. It also prohibits getting trapped in local minima. The mutation percentage in GA is usually chosen between 0.001 and 0.5 [
31], and hence according to our primary generated numerical results
pm = 0.3 is considered in this work. This way, in each generation (from the second generation), Nm = [
pm × N
pop] of mutants are generated. Moreover, to generate a mutant, a mutation rate less than 0.1 is usually considered in GA [
31,
32]. Comparing the numerical results for different values 0.01, 0.02, ···, 0.08, we consider µ = 0.02 as mutation rate which determines the number of components (or genes) which are changed in the selected solution (or chromosome), and we do the mutation by using the standard normal distribution to change the values of the selected components in each solution. In fact,
component are changed in the selected solution for mutation, where
is the number of vertices in the gridshells and
is the smallest integer number not less than •.
(6) Merging: After selecting parents, generating new children, and mutating some solutions, we merge all the current and newly obtained solutions leading to Npop + Nc + Nm solutions. Then, as the number of solutions in each generation should be the same, all the solutions are sorted and arranged ascendingly according to the costs, and the first Npop ones are selected as the next population.
We note that in GA the stages (3)–(6), explained above, are repeated until some considered stop criteria is satisfied.
Stop criteria. In fact, in all the iterative processes such as GA and PSO, the algorithm needs some stopping criteria. Some common stopping criteria used in the literature are: (i) stop by exceeding the given maximum number of iterations, (ii) stop when the improvement of solution in a given number of iterations is less than a given limit, (iii) stop when a satisfactory solution is determined, and (iv) stop when the cost function slope is almost zero. Here, for both GA and PSO, we consider a maximum number of M = 2000 iteration as the stop criterion.
2.3. Particle Swarm Optimization
Here, we explain briefly the particle swarm optimization (PSO) for the reader not being required to have any previous knowledge of this technique as well. This technique is also an iterative search method, inspired from social behavior, which was initially proposed by Kennedy and Eberhart [
30]. There are four main stages in PSO explained as follows.
(1) Generating an initial population: Like GA, it is assumed that there is some initial population of individuals, called particles, in PSO. Usually, all the particles in PSO move from the current positions to some new positions based on the swarm intelligence in each iteration. Here, we consider the same initial population for PSO as the GA method. It is noted that each row in the matrix V
new, defined in
Section 2.3, shows the position of a particle in the initial population and the matrix is updated whenever the position of the particles are changed. We note that the initially generated particles move toward the positions of the so-called Pbest and Gbest, explained below.
Thus, after generating the initial population, we need to evaluate them to determine Pbest and Gbest in the population.
(2) Velocity Updating: In this technique, the movement of each particle in every iteration is determined by its velocity. Let
and
respectively denote the position and velocity of particle
i in the
kth iteration in the search space. The velocity of particle
i for the next iteration is calculated as follows.
where
w is the inertia factor which controls the flying dynamics,
and
are the acceleration factors for the experiences of Pbest and Gbest, respectively,
and
are random variables in the interval [0,1] which provide the ability of stochastic searching for PSO. The accelerating factors
and
compromise the trade-off between exploitation and exploration. It is noted that
is the best experienced position for particle
i until the
kth iteration, and
is the best experienced position among all the particles so far. We also note that the velocities for the particles in the initial population are set initially to be zero.
There are three parameters in Equation (4) which are
w,
, and
. Many studies have been done so far to determine the best parameters for PSO technique. On the inertia weight, i.e.,
w, the studies show that a fixed
w will not get to good results, and hence several techniques have been proposed in the literature by which w is lessened along with iteration times [
26]. Some researchers suggested the interval [0.9,1.2] and some others the interval [0,1] for
w [
25,
26,
30]. Similarly, several researchers have studied the acceleration factors
and
, and suggested different values for these factors. As our main aim is not tuning the best parameters for the PSO method in this area, we simply compared the four more common strategies taken from literature [
26] numerically to select the best one. The strategies are (1)
w = 1,
wdamp = 0.999,
and
, (2)
w = 1,
wdamp = 0.999,
= 2.8 and
= 1.3, (3)
w = 1,
wdamp = 0.999,
= 1.49445 and
= 1.49445 and (4) Letting φ
1 = 2.05, φ
2 = 2.05, φ = φ
1 + φ
2, and ξ = 2/(φ − 2 +
), then we have
w = ξ,
= ξ × φ
1, and
= ξ × φ
2. We note that in the first three strategies, the inertia weight is updated in each iteration by
w = w.wdamp, and this is why
wdamp is called the damping factor. It is also noted that the values of
and
in the strategies 3 and 4 are the same. We found the first strategy as the best among these four strategies for our desired problem, and hence we consider its parameters in this work.
We note that after updating velocities and before updating the particles’ positions, it is important to check if the velocities are within a pre-specified range. In fact, to avoid violent random walking and control the global exploration of the particles, some lower and upper speed limits for each particle are determined and when the velocity of a particle exceeds one of the limits, it is replaced with the related limit. These limits do not impact on the particle position, and only lessen the step size of velocity, and hence the limits control the particles’ moves and the aspects of exploration and exploitation [
25,
30]. Moreover, greater (smaller) speed limits lead to global (local) exploration [
25,
30]. The process of controlling velocity is called velocity clamping.
Although the movement of particles are controlled by velocity limits, sometimes even by using the lower limit of velocity, the new position of a particle is obtained out of the search area or feasible space. In fact, when the current position of a particle is close enough to the borders of the search area, according to the direction of velocity, even with small velocity, the new position of the particle will be out of the search area. This shows that in the next iterations, according to the inertia, this will happen again that the new position of the particle stays out of search space. Hence, to avoid such an event, the direction of velocity is changed to the opposite direction, that is its sign will be changed. This process is called “velocity mirror effect”.
(3) Position Updating: Unlike the genetic technique in which usually not all the members of the population are replaced with some new children in each iteration, in the PSO method, all the particles in the population move and change in each iteration. To do so, after calculating the velocity of the particle
i, its position is updated as follows.
Apart from all the modifications and limits on the velocities, the new positions of some particles may be out of the search area. Hence, the updated positions should be checked for being within the allowed domain. If the position of a particle exceeds the lower or upper bounds, the position of the particle is replaced with the associated bound.
(4) Memory updating: In this technique, in each iteration, the position of every particle may change, and it is one of the differences between GA and PSO. Therefore, after updating the positions of the particles, we need to evaluate all the particles in order to check if it is required to update the P best and Gbest variables as they play an essential role in movement of the particles. However, it is not required to sort the particles after the evaluation process, and we only need to update the memory of P best and Gbest, if it is required. In this work, the same cost function is considered for both GA and PSO techniques.
The above-mentioned stages (2)–(4) in PSO are repeated until some considered stop criteria is satisfied. As stated in the previous section, we consider a maximum number of M = 2000 iteration as stop criteria for both GA and PSO in this work.
2.4. The Regularity Indexes
Here, we explain in more detail our introduced indexes, which are length ratio and shape ratio, as well as two similar indexes introduced in [
19]. As the indexes introduced by Nooshin and his coworkers have been also called length and shape ratios, to make the four indexes distinguishable, we denote our length and shape ratios by OLR and OSR, respectively, and the introduced length and shape ratios by Nooshin and his coworkers by NLR and NSR, respectively. We recall that V is a matrix containing the position of all the vertices in Cartesian coordinates with no redundant vertices. In fact, V is an N
v × 3 matrix, where N
v is the number of vertices in the gridshell. Each row in V provides the Cartesian coordinates of a vertex in the grid, and the vertices are numbered in the order of appearance in V.
In the order of appearance in V. For instance, the vertex whose coordinates are given in the third row of V is numbered 3. The matrix F gives the vertices of each face. In fact, in a triangular (quadrangular) gridshell, F is an N
f × 3 (N
f × 4) matrix, where N
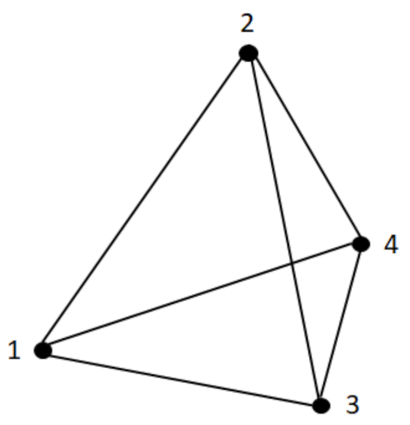
f is the number of faces in the grid. Each row in F shows which vertices are in the corresponding face. To have a better understanding, a simple grid (pyramid) is given in
Figure 1. The matrices F and V for this figure are as follows.
As it is seen, there are four vertices and also four faces in
Figure 1. The
ith row in V gives the Cartesian coordinates of the
ith vertex. For example, the coordinates of vertex (1) are (0, 0.65, 0).
The ith row in F gives the vertices of the ith face in the grid. For example, the first face in the grid is the triangle consisting of vertices (1), (2) and (3).
Length ratios: Our introduced length ratio (OLR) is defined as the standard deviation of lengths of all the elements in the grid. Hence, after calculation of all the lengths, OLR can be obtained by computing the standard deviation of all the lengths. The introduced length ratio by Nooshin and his coworkers [
19] (NLR) is (the shortest element’s length/the longest element’s length) for each face in the gridshell, and then for the gridshell is the mean value of all the calculated values for the faces.
Hence, for both OLR and NLR, one first needs to calculate the length of all the elements in the grid. To do so, we use the rows in F to find the beginning and end vertices of each element, and then use matrix V to find the coordinates of the desired vertices to compute the distance between them. For example, in
Figure 1, according to the first row in F, we calculate the distance between the vertices (1) and (2), (2) and (3), and (3) and (1) by using their given coordinates in matrix V.
This way, we obtain the row [0.8078 0.8322 0.7382] as the lengths of elements in the first face in this figure. The matrix of lengths, which is denoted by L, for this figure is given below in which each row gives the lengths of the elements in the corresponding face in matrix F.
Now, OLR can be simply computed as the standard deviation of all the lengths calculated in matrix L above which is equal to 0.0398. For computing NLR, we first calculate (the shortest element’s length/the longest element’s length) for each face. This way, the vector [0.8870, 0.9029, 0.9171, 0.9672] is obtained in which for example the first component corresponds to the first face in the grid, that is the first row in matrix L above. Then, NLR is equal to the mean of all the calculated values in this vector, which is 0.9186 in this example. As a result, we have OLR = 0.0398 and NLR = 0.9186 in this example.
Shape ratios: Our introduced shape ratio (OSR) is defined as the standard deviation of all the angles between the elements in all the faces. Similar to the length ratio, the NSR, which is the introduced shape ratio in [
19], is (the smallest internal angle/the largest internal angle) for each face in the gridshell, and then for the gridshell is the mean value of all the calculated values for the faces. This time, one needs to compute the inner angles in all the faces of the gridshell. To do so, as we have the Cartesian coordinates of the vertices from V and the faces from F, in each iteration, we consider a face, which is triangle or quadrangle, and compute its angles by using the formula
, where
and
are two vectors and θ is the angle between them. This way, a matrix of size of F is obtained as a matrix of angles, denoted by A here. For example, the angles for the first face in
Figure 1 are [1.1336 0.9335 1.0746] in radian and the matrix of angles (in radian) in this figure is as follows.
Now, in this example, OSR can be simply calculated as the standard deviation of all the angles calculated in matrix A above which is equal to 0.0684. To compute NSR, one first needs to calculate (the smallest internal angle/the largest internal angle) for each face. This way, the vector [0.8235, 0.8467, 0.8704, 0.9463] is obtained. Then, NSR is equal to the mean value of all the calculated values in this vector, which equals 0.8717 in this example. Briefly, we have OSR = 0.0684 and NSR0 = 0.8717 in this example.
We note that in both introduced ratios in [
19], the smallest item is divided by the largest item for each face, and the average of all the calculated values is considered as the corresponding ratio. However, as the standard deviation is a very popular measure and has several advantages, we considered it instead of simply dividing the smallest value by the largest value. In fact, standard deviation measures the deviation from the mean and is based on all the items (not only the smallest and largest). Moreover, as the square is a nice function in which the numbers smaller than one become smaller and the numbers larger than one become larger, and hence we can ignore the small deviations and consider the larger ones more clearly. To show the practical efficiency of our introduced indexes, we compare the indexes on some benchmarks in
Section 3.
2.5. Mathematical Model of the Problem
Now that the problem has been completely described, the general mathematical model of the problem is provided in this section as follows.
where α and β are constants,
Ne the number of elements,
li the length of the
ith element,
the mean value of all the elements’ lengths, the number of all the angles, θi the ith angle, and θ is the mean value of all the angles in the given gridshell. Moreover, Ω is a feasible region in the xy plane, V new an N
v × 2 matrix which contains the first two columns of V, which contains the Cartesian coordinates of the vertices, and F is a matrix which gives the faces in the desired gridshell.
Moreover, Ω is a feasible region in the xy plane, V new an Nv × 2 matrix which contains the first two columns of V, which contains the Cartesian coordinates of the vertices, and F is a matrix which gives the faces in the desired gridshell.
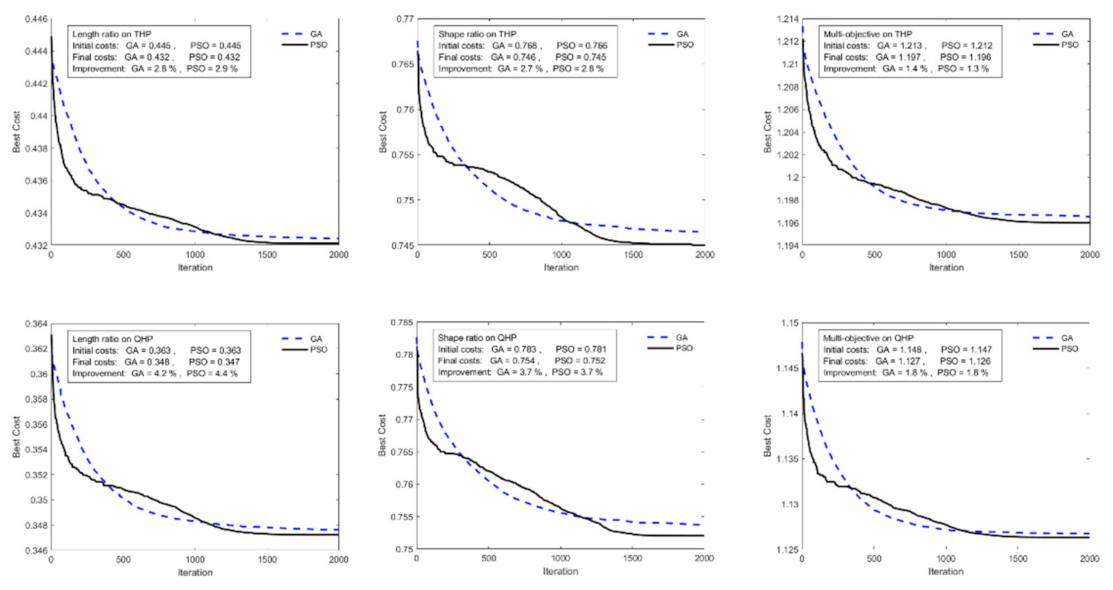
One can set the constants α and β according to a specific aim in the improvement process. For example, setting α = 1, β = 0 the gridshell’s regularity is improved according to the length ratio while setting α = 0, β = 1 the gridshell’s regularity is improved taking into account the shape ratio. Additionally, setting 0 < α, β < 1, we have a multi-objective case. We note that having V new and F, one can first calculate the third coordinates of each vertex by using the formula of the surface, and then the elements’ lengths and the inner angles of all the faces. Therefore, the mathematical model of the problem is well-defined and the function f can be minimized by moving V new in Ω.
Now, having described all the processes, we are ready to provide the experimental results.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}