
Path-Planning for Mobile Robots Using a Novel Variable-Length Differential Evolution Variant



 , and
, and
Abstract
1. Introduction
1.1. A Review of Path-Planning Methods
1.2. Optimization in Path-Planning
1.3. Scope and Contributions of the Proposal
2. The Path-Planning Problem
2.1. General Variable-Length-Vector Optimization Problem
2.2. The Path-Planning for Mobile Robots as a Variable-Length-Vector Optimization Problem
2.2.1. The Variable-Length-Vector of Design Variables
2.2.2. The Objective Function
2.2.3. The Constraints
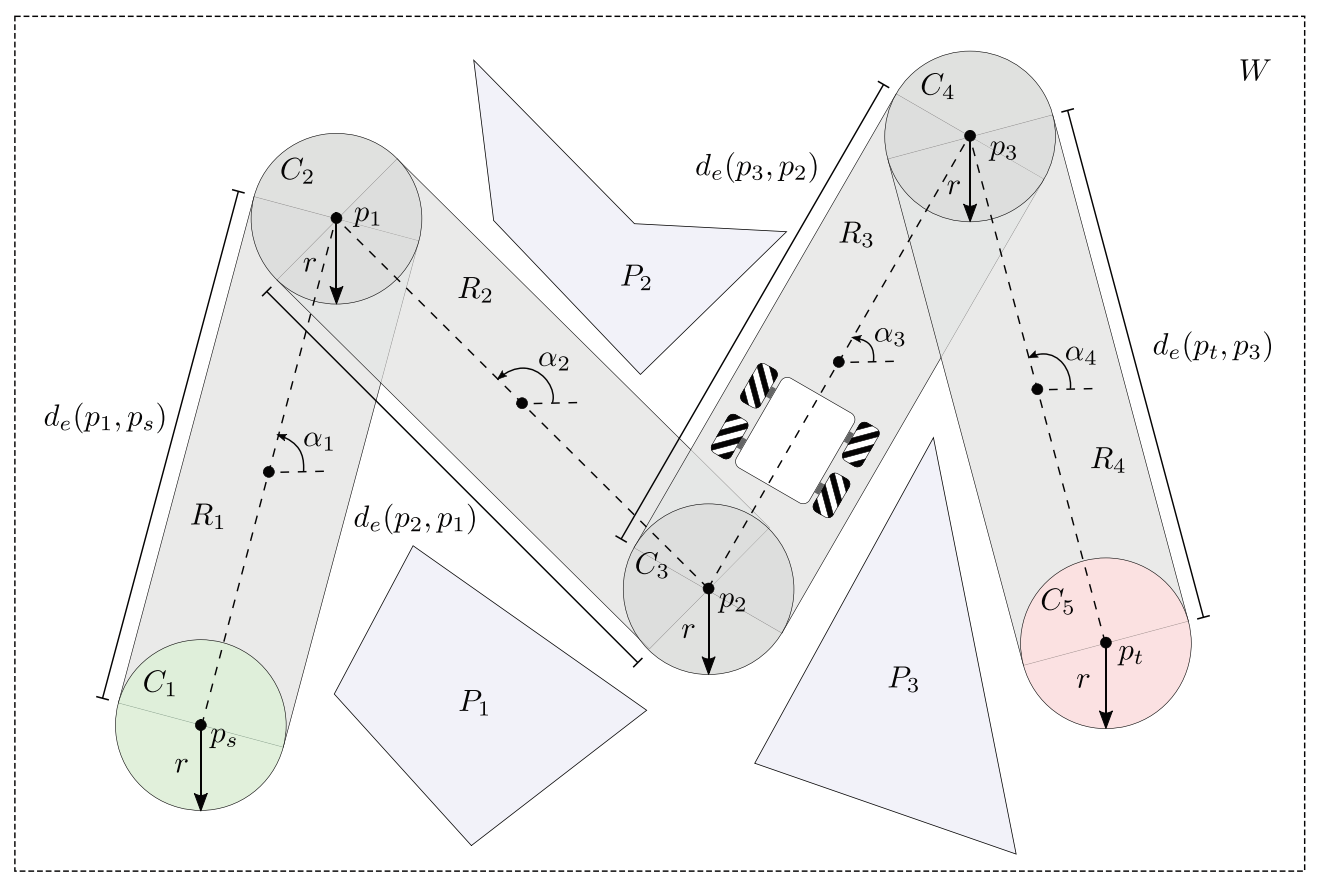
- Obstacles: Polygons , defined by an arbitrary number of vertices which describe all the obstacles in the workspace W.
- Path points: Circles are assigned to each control point in the path. Each circle is centered in the control point and has a diameter of that matches the length of the longest diagonal of the 4MWMR in the plane. This shape is selected to allow possible orientation changes of the 4MWMR.
- Path edges: In order to improve the collision detection procedure, rectangular geometries are attached to each edge in the path. An edge is the line segment between a pair of consecutive points in the path. The width of each is equal to the edge length, its height is and its orientation matches the inclination of the edge. The is centered in the middle of the two points.
3. The Novel Variable-Length-Vector Differential Evolution
| Algorithm 1: Variable-Length-Vector Differential Evolution (VLV-DE) |
 |
3.1. Initialization
3.2. Evolutionary Cycle
3.3. Normalization
| Algorithm 2: Normalize |
 |
3.4. Compression
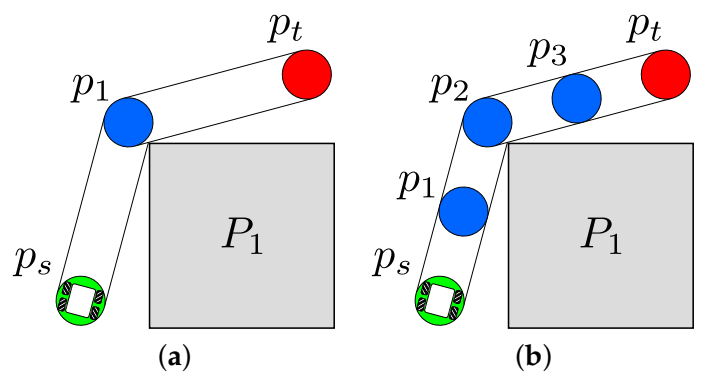
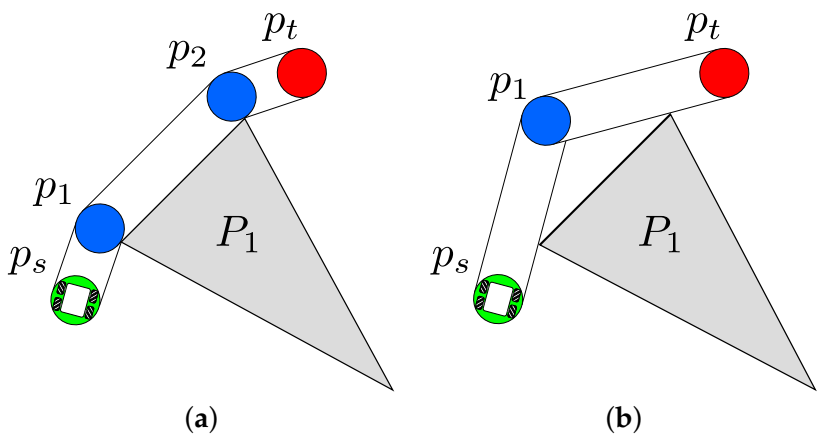
- Selecting a pair of consecutive path points and replacing them with a new single one that preserves information from both. The new variable is obtained as the pair’s mean and can be altered through a variation operator (the polynomial mutation [67]) to enhance the exploitative search.
- Removing the first or the last path point.
3.5. Decompression
- Selecting a pair of consecutive path points to generate a single one based on their information, which is then inserted in the middle of both. This new variable is calculated as the pair’s mean and can be modified by using a variation operator (the polynomial mutation) to improve the exploratory search.
- Including altered versions of the first or the last path points (obtained through the polynomial mutation), at the beginning or the end of the solution, respectively.
| Algorithm 3: Compress |
 |
| Algorithm 4: Decompress |
 |
3.6. Evolutionary Operators
3.7. Selection
3.8. Local Search
| Algorithm 5: LocalSearch |
| Input: (arbitrary solution) Output: (local best solution) 1 ; 2 Variate using Gaussian mutation; 3 Normalize(,); 4 Variate using Polynomial Mutation; 5 Evaluate ; 6 Select as the best between and |
4. Results an Discussion
4.1. Details of the Experiment
4.2. Discussion of the Results
5. Conclusions and Future Work
Author Contributions
Funding
Conflicts of Interest
References
- Naranjo, J.E.; Lozada, E.C.; Espín, H.I.; Beltran, C.; García, C.A.; García, M.V. Flexible architecture for transparency of a bilateral tele-operation system implemented in mobile anthropomorphic robots for the oil and gas industry. IFAC-PapersOnLine 2018, 51, 239–244. [Google Scholar] [CrossRef]
- Wang, Y.; Lang, H.; De Silva, C.W. A hybrid visual servo controller for robust grasping by wheeled mobile robots. IEEE/ASME Trans. Mechatron. 2009, 15, 757–769. [Google Scholar] [CrossRef]
- Orozco-Rosas, U.; Picos, K.; Montiel, O. Hybrid path planning algorithm based on membrane pseudo-bacterial potential field for autonomous mobile robots. IEEE Access 2019, 7, 156787–156803. [Google Scholar] [CrossRef]
- Primatesta, S.; Guglieri, G.; Rizzo, A. A risk-aware path planning strategy for uavs in urban environments. J. Intell. Robot. Syst. 2019, 95, 629–643. [Google Scholar] [CrossRef]
- Alexopoulos, C.; Griffin, P.M. Path planning for a mobile robot. IEEE Trans. Syst. Man Cybern. 1992, 22, 318–322. [Google Scholar] [CrossRef]
- Niu, H.; Lu, Y.; Savvaris, A.; Tsourdos, A. An energy-efficient path planning algorithm for unmanned surface vehicles. Ocean Eng. 2018, 161, 308–321. [Google Scholar] [CrossRef]
- Yang, L.; Qi, J.; Song, D.; Xiao, J.; Han, J.; Xia, Y. Survey of robot 3D path planning algorithms. J. Control Sci. Eng. 2016. [Google Scholar] [CrossRef]
- LaValle, S.M. Rapidly-Exploring Random Trees: A New Tool for Path Planning; Tech. Rep. 98-11; Department of Computer Science, Iowa State University: Ames, IA, USA, 1998. [Google Scholar]
- Kavraki, L.E.; Svestka, P.; Latombe, J.C.; Overmars, M.H. Probabilistic roadmaps for path planning in high-dimensional configuration spaces. IEEE Trans. Robot. Autom. 1996, 12, 566–580. [Google Scholar] [CrossRef]
- Karaman, S.; Frazzoli, E. Incremental sampling-based algorithms for optimal motion planning. Robot. Sci. Syst. VI 2010, 104. [Google Scholar] [CrossRef]
- Karaman, S.; Frazzoli, E. Sampling-based algorithms for optimal motion planning. Int. J. Robot. Res. 2011, 30, 846–894. [Google Scholar] [CrossRef]
- Ayanian, N.; Kallem, V.; Kumar, V. Synthesis of feedback controllers for multiple aerial robots with geometric constraints. In Proceedings of the 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Francisco, CA, USA, 25–30 September 2011; pp. 3126–3131. [Google Scholar]
- Sethian, J.A. Fast marching methods. SIAM Rev. 1999, 41, 199–235. [Google Scholar] [CrossRef]
- Barraquand, J.; Langlois, B.; Latombe, J.C. Numerical potential field techniques for robot path planning. IEEE Trans. Syst. Man Cybern. 1992, 22, 224–241. [Google Scholar] [CrossRef]
- Janet, J.A.; Luo, R.C.; Kay, M.G. The essential visibility graph: An approach to global motion planning for autonomous mobile robots. In Proceedings of the 1995 IEEE International Conference on Robotics and Automation, Nagoya, Japan, 21–27 May 1995; Volume 2, pp. 1958–1963. [Google Scholar]
- Stentz, A. The focussed D* algorithm for real-time replanning. In Proceedings of the 14th International Joint Conference on Artificial Intelligence (IJCAI’95), Montreal, QC, Canada, 20–25 August 1995; Volume 2, pp. 1652–1659. [Google Scholar]
- Britzelmeier, A.; Gerdts, M. A Nonsmooth Newton Method for Linear Model-Predictive Control in Tracking Tasks for a Mobile Robot With Obstacle Avoidance. IEEE Control Syst. Lett. 2020, 4, 886–891. [Google Scholar] [CrossRef]
- Liu, L.; Wang, D.; Peng, Z. Path following of marine surface vehicles with dynamical uncertainty and time-varying ocean disturbances. Neurocomputing 2016, 173, 799–808. [Google Scholar] [CrossRef]
- Song, Q.; Zhao, Q.; Wang, S.; Liu, Q.; Chen, X. Dynamic path planning for unmanned vehicles based on fuzzy logic and improved ant colony optimization. IEEE Access 2020, 8, 62107–62115. [Google Scholar] [CrossRef]
- Singh, N.H.; Thongam, K. Neural network-based approaches for mobile robot navigation in static and moving obstacles environments. Intell. Serv. Robot. 2019, 12, 55–67. [Google Scholar] [CrossRef]
- Wang, J.; Chi, W.; Li, C.; Wang, C.; Meng, M.Q.H. Neural RRT*: Learning-based optimal path planning. IEEE Trans. Autom. Sci. Eng. 2020, 17, 1748–1758. [Google Scholar] [CrossRef]
- Amer, M.; Namaane, A.; M’sirdi, N. Optimization of hybrid renewable energy systems (HRES) using PSO for cost reduction. Energy Procedia 2013, 42, 318–327. [Google Scholar] [CrossRef]
- Han, M.; Wang, M.H.; Fan, J.C. Trajectory optimization based on improved differential evolution algorithm. Control Decis. 2012, 27, 247–251. [Google Scholar]
- Huang, J.; Qingyun, W. Robust optimization of hub-and-spoke airline network design based on multi-objective genetic algorithm. J. Transp. Syst. Eng. Inf. Technol. 2009, 9, 86–92. [Google Scholar] [CrossRef]
- Flores-Caballero, G.; Rodríguez-Molina, A.; Aldape-Pérez, M.; Villarreal-Cervantes, M.G. Optimized Path-Planning in Continuous Spaces for Unmanned Aerial Vehicles Using Meta-Heuristics. IEEE Access 2020, 8, 176774–176788. [Google Scholar] [CrossRef]
- Karami, A.H.; Hasanzadeh, M. An adaptive genetic algorithm for robot motion planning in 2D complex environments. Comput. Electr. Eng. 2015, 43, 317–329. [Google Scholar] [CrossRef]
- Nazarahari, M.; Khanmirza, E.; Doostie, S. Multi-objective multi-robot path planning in continuous environment using an enhanced genetic algorithm. Expert Syst. Appl. 2019, 115, 106–120. [Google Scholar] [CrossRef]
- Jones, D.F.; Mirrazavi, S.K.; Tamiz, M. Multi-objective meta-heuristics: An overview of the current state-of-the-art. Eur. J. Oper. Res. 2002, 137, 1–9. [Google Scholar] [CrossRef]
- Li, H.; Deb, K. Challenges for evolutionary multiobjective optimization algorithms in solving variable-length problems. In Proceedings of the 2017 IEEE Congress on Evolutionary Computation (CEC), San Sebastian, Spain, 5–8 June 2017; pp. 2217–2224. [Google Scholar]
- Meza, G.R.; Ferragud, X.B.; Saez, J.S.; Durá, J.M.H. Controller Tuning with Evolutionary Multiobjective Optimization: A Holistic Multiobjective Optimization Design Procedure; Springer International Publishing: Cham, Switzerland, 2016; Volume 85. [Google Scholar]
- Onal, C.D.; Tolley, M.T.; Wood, R.J.; Rus, D. Origami-inspired printed robots. IEEE/ASME Trans. Mechatron. 2014, 20, 2214–2221. [Google Scholar] [CrossRef]
- Rabadi, G.; Moraga, R.J.; Al-Salem, A. Heuristics for the unrelated parallel machine scheduling problem with setup times. J. Intell. Manuf. 2006, 17, 85–97. [Google Scholar] [CrossRef]
- Dewang, H.S.; Mohanty, P.K.; Kundu, S. A robust path planning for mobile robot using smart particle swarm optimization. Procedia Comput. Sci. 2018, 133, 290–297. [Google Scholar] [CrossRef]
- Lamini, C.; Benhlima, S.; Elbekri, A. Genetic algorithm based approach for autonomous mobile robot path planning. Procedia Comput. Sci. 2018, 127, 180–189. [Google Scholar] [CrossRef]
- Martinez-Soltero, E.G.; Hernandez-Barragan, J. Robot navigation based on differential evolution. IFAC-PapersOnLine 2018, 51, 350–354. [Google Scholar] [CrossRef]
- Tang, B.; Zhu, Z.; Luo, J. Hybridizing particle swarm optimization and differential evolution for the mobile robot global path planning. Int. J. Adv. Robot. Syst. 2016, 13, 86. [Google Scholar] [CrossRef]
- Oleiwi, B.K.; Roth, H.; Kazem, B.I. Multi objective optimization of path and trajectory planning for non-holonomic mobile robot using enhanced genetic algorithm. In Proceedings of the 8th International Conference on Neural Networks and Artificial Intelligence (ICNNAI 2014), Brest, Belarus, 3–6 June 2014; pp. 50–62. [Google Scholar]
- Niederberger, C.; Radovic, D.; Gross, M. Generic path planning for real-time applications. In Proceedings of the Computer Graphics International, Crete, Greece, 19 June 2004; pp. 299–306. [Google Scholar]
- Yang, K.; Jung, D.; Sukkarieh, S. Continuous curvature path-smoothing algorithm using cubic B zier spiral curves for non-holonomic robots. Adv. Robot. 2013, 27, 247–258. [Google Scholar] [CrossRef]
- Son, T.D.; Ahn, H.S.; Moore, K.L. Iterative learning control in optimal tracking problems with specified data points. Automatica 2013, 49, 1465–1472. [Google Scholar] [CrossRef]
- Davoodi, M.; Panahi, F.; Mohades, A.; Hashemi, S.N. Clear and smooth path planning. Appl. Soft Comput. 2015, 32, 568–579. [Google Scholar] [CrossRef]
- Shwail, S.H.; Karim, A.; Turner, S. Probabilistic multi robot path planning in dynamic environments: A comparison between A* and DFS. Int. J. Comput. Appl. 2013, 82. [Google Scholar]
- Tu, J.; Yang, S.X. Genetic algorithm based path planning for a mobile robot. In Proceedings of the 2003 IEEE International Conference on Robotics and Automation (ICRA 2003), Taipei, Taiwan, 14–19 September 2003; Volume 1, pp. 1221–1226. [Google Scholar]
- Riquelme, J.; Ridao, M.; Camacho, E.; Toro, M. Using genetic algorithms with variable-length individuals for planning two-manipulators motion. In Artificial Neural Nets and Genetic Algorithms; Springer: Vienna, Austria, 1998; pp. 26–30. [Google Scholar]
- Limbourg, P.; Kochs, H.D. Preventive maintenance scheduling by variable dimension evolutionary algorithms. Int. J. Press. Vessels Pip. 2006, 83, 262–269. [Google Scholar] [CrossRef]
- Chuanjiao, S.; Wei, Z.; Yuanqing, W. Scheduling combination and headway optimization of bus rapid transit. J. Transp. Syst. Eng. Inf. Technol. 2008, 8, 61–67. [Google Scholar]
- Ahn, C.W.; Ramakrishna, R.S. A genetic algorithm for shortest path routing problem and the sizing of populations. IEEE Trans. Evol. Comput. 2002, 6, 566–579. [Google Scholar]
- Qiongbing, Z.; Lixin, D. A new crossover mechanism for genetic algorithms with variable-length chromosomes for path optimization problems. Expert Syst. Appl. 2016, 60, 183–189. [Google Scholar] [CrossRef]
- Chen, Y.; Mahalec, V.; Chen, Y.; Liu, X.; He, R.; Sun, K. Reconfiguration of satellite orbit for cooperative observation using variable-size multi-objective differential evolution. Eur. J. Oper. Res. 2015, 242, 10–20. [Google Scholar] [CrossRef]
- Das, S.; Abraham, A.; Konar, A. Automatic clustering using an improved differential evolution algorithm. IEEE Trans. Syst. Man Cybern. Part A Syst. Hum. 2007, 38, 218–237. [Google Scholar] [CrossRef]
- Yuan, H.; He, J. Evolutionary design of operational amplifier using variable-length differential evolution algorithm. In Proceedings of the 2010 International Conference on Computer Application and System Modeling (ICCASM 2010), Taiyuan, China, 22–24 October 2010; Volume 4, p. V4-610. [Google Scholar]
- Pereira, C.M.; Lapa, C.M.; Mol, A.C.; Da Luz, A.F. A particle swarm optimization (PSO) approach for non-periodic preventive maintenance scheduling programming. Prog. Nucl. Energy 2010, 52, 710–714. [Google Scholar] [CrossRef]
- Wang, B.; Sun, Y.; Xue, B.; Zhang, M. Evolving deep convolutional neural networks by variable-length particle swarm optimization for image classification. In Proceedings of the 2018 IEEE Congress on Evolutionary Computation (IEEE CEC 2018), Rio de Janeiro, Brazil, 8–13 July 2018; pp. 1–8. [Google Scholar]
- Xue, B.; Ma, X.; Gu, J.; Li, Y. An improved extreme learning machine based on variable-length particle swarm optimization. In Proceedings of the 2013 IEEE International Conference on Robotics and Biomimetics (ROBIO), Shenzhen, China, 12–14 December 2013; pp. 1030–1035. [Google Scholar]
- Wilt, C.M.; Thayer, J.T.; Ruml, W. A comparison of greedy search algorithms. In Proceedings of the Third Annual Symposium on Combinatorial Search, Atlanta, GA, USA, 8–10 July 2010; pp. 130–136. [Google Scholar]
- Alakshendra, V.; Chiddarwar, S.S. Adaptive robust control of Mecanum-wheeled mobile robot with uncertainties. Nonlinear Dyn. 2017, 87, 2147–2169. [Google Scholar] [CrossRef]
- Sánchez, P.; Casado, R.; Bermúdez, A. Real-Time Collision-Free Navigation of Multiple UAVs Based on Bounding Boxes. Electronics 2020, 9, 1632. [Google Scholar] [CrossRef]
- Lin, M.C.; Manocha, D.; Cohen, J.; Gottschalk, S. Collision detection: Algorithms and applications. In Algorithms for Robotic Motion and Manipulation; A K Peters/CRC Press: New York, NY, USA, 1997; pp. 129–142. [Google Scholar]
- van der Spuy, R. Collisions Between Polygons. In AdvancED Game Design with Flash; Apress: Berkeley, CA, USA, 2010; pp. 223–303. [Google Scholar] [CrossRef]
- Madavan, N.K. Multiobjective optimization using a Pareto differential evolution approach. In Proceedings of the 2002 Congress on Evolutionary Computation. CEC’02 (Cat. No. 02TH8600), Honolulu, HI, USA, 12–17 May 2002; Volume 2, pp. 1145–1150. [Google Scholar]
- Chakraborty, U.K. Advances in Differential Evolution; Springer: Berlin/Heidelberg, Germany, 2008; Volume 143. [Google Scholar]
- Price, K.V. Differential evolution. In Handbook of Optimization; Springer: Berlin/Heidelberg, Germany, 2013; pp. 187–214. [Google Scholar]
- Mezura-Montes, E.; Velázquez-Reyes, J.; Coello Coello, C.A. A comparative study of differential evolution variants for global optimization. In Proceedings of the 8th Annual Conference on Genetic and Evolutionary Computation (GECCO ’06), Seattle, WA, USA, 8–12 July 2006; pp. 485–492. [Google Scholar]
- Thayer, J.T.; Ruml, W. Faster than Weighted A*: An Optimistic Approach to Bounded Suboptimal Search. In Proceedings of the Eighteenth International Conference on Automated Planning and Scheduling (ICAPS 2008), Sydney, Australia, 14–18 September 2008; pp. 355–362. [Google Scholar]
- Seet, B.C.; Liu, G.; Lee, B.S.; Foh, C.H.; Wong, K.J.; Lee, K.K. A-STAR: A mobile ad hoc routing strategy for metropolis vehicular communications. In Proceedings of the International Conference on Research in Networking, Athens, Greece, 9–14 May 2004; pp. 989–999. [Google Scholar]
- Fogel, D.B.; Atmar, J.W. Comparing genetic operators with Gaussian mutations in simulated evolutionary processes using linear systems. Biol. Cybern. 1990, 63, 111–114. [Google Scholar] [CrossRef]
- Zeng, G.Q.; Chen, J.; Li, L.M.; Chen, M.R.; Wu, L.; Dai, Y.X.; Zheng, C.W. An improved multi-objective population-based extremal optimization algorithm with polynomial mutation. Inf. Sci. 2016, 330, 49–73. [Google Scholar] [CrossRef]
- Goldberg, D.E. Genetic Algorithms; Pearson Education: Tamil Nadu, India, 2006. [Google Scholar]
- Montero, E.; Riff, M.C. Effective collaborative strategies to setup tuners. Soft Comput. 2020, 24, 5019–5041. [Google Scholar] [CrossRef]
- Nasir, J.; Islam, F.; Malik, U.; Ayaz, Y.; Hasan, O.; Khan, M.; Muhammad, M.S. RRT*-SMART: A rapid convergence implementation of RRT. Int. J. Adv. Robot. Syst. 2013, 10, 299. [Google Scholar] [CrossRef]
- Broderick, J.A.; Tilbury, D.M.; Atkins, E.M. Characterizing energy usage of a commercially available ground robot: Method and results. J. Field Robot. 2014, 31, 441–454. [Google Scholar] [CrossRef]
- Opara, K.R.; Arabas, J. Differential Evolution: A survey of theoretical analyses. Swarm Evol. Comput. 2019, 44, 546–558. [Google Scholar] [CrossRef]
- Hasegawa, T.; Terasaki, H. Collision avoidance: Divide-and-conquer approach by space characterization and intermediate goals. IEEE Trans. Syst. Man Cybern. 1988, 18, 337–347. [Google Scholar] [CrossRef]
- Tasoulis, D.K.; Pavlidis, N.G.; Plagianakos, V.P.; Vrahatis, M.N. Parallel differential evolution. In Proceedings of the 2004 Congress on Evolutionary Computation (IEEE CEC 2004), Portland, OR, USA, 19–23 June 2004; Volume 2, pp. 2023–2029. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
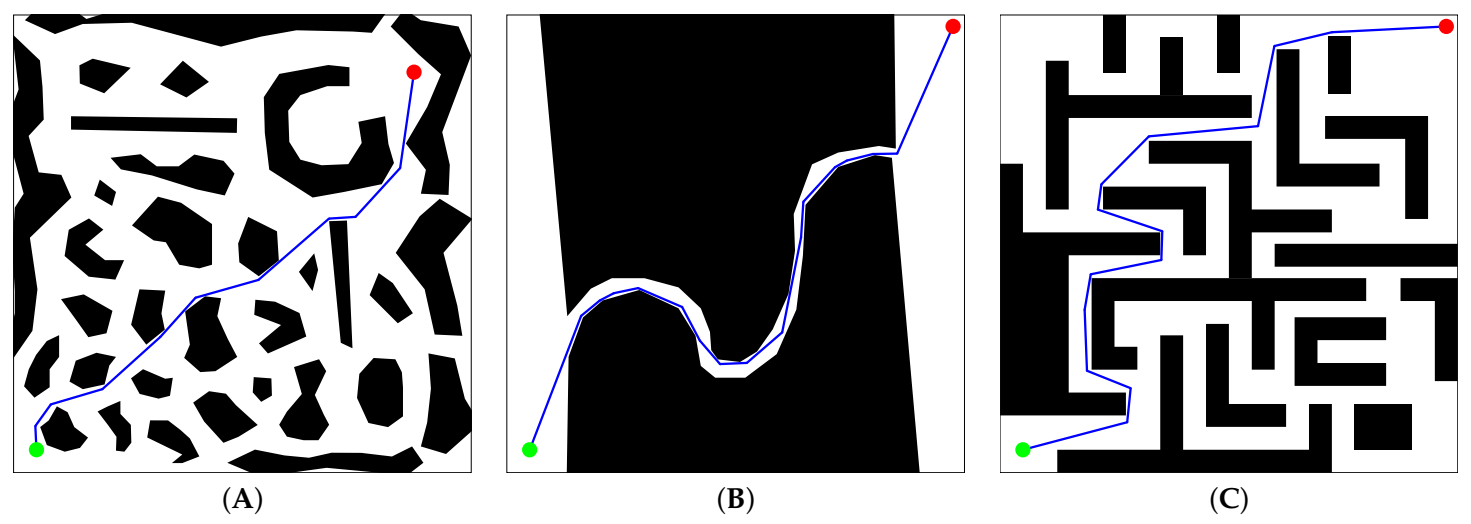
| Test Case | Obstacles | Size (m, m) | (m, m) | (m, m) | Complexity |
|---|---|---|---|---|---|
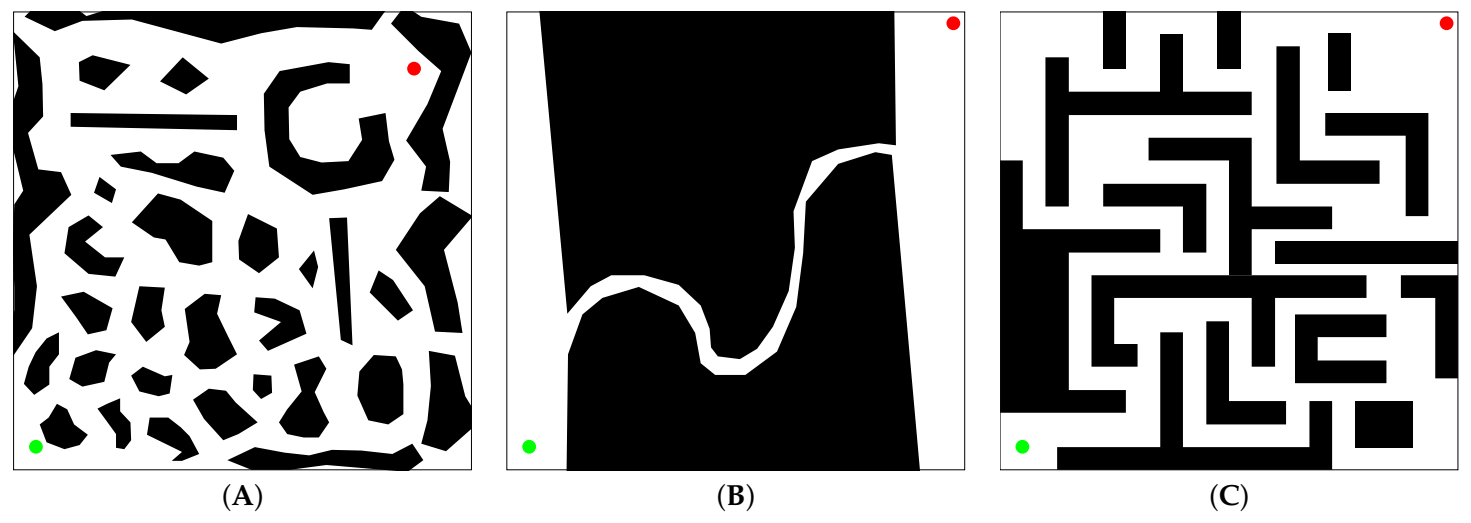
| (A) | 32 | (100, 100) | (5, 5) | (87.5, 87.5) | 0/1E8 |
| (B) | 2 | (100, 100) | (5, 5) | (97.5, 97.5) | 0/1E8 |
| (C) | 17 | (100, 100) | (5, 5) | (97.5, 97.5) | 0/1E8 |
| Test Case (A) | Test Case (B) | Test Case (c) | |
|---|---|---|---|
| Mean | 9 | 13.2666 | 13.9666 |
| STD | 1.2317 | 1.2015 | 1.5196 |
| C.I. | [8.61788, 9.3821] | [12.8939, 13.6394] | [13.4952, 14.4380] |
| Mean J | 2627.0570 | 3453.4441 | 4095.0317 |
| STD | 45.9620 | 11.4728 | 48.2714 |
| C.I. | [2612.7988, 2641.3152] | [3449.8850, 3457.0032] | [4080.0571, 4110.0064] |
| Best | 9 | 15 | 13 |
| Best J | 2548.8696 | 3415.7757 | 3989.3064 |
| Worst | 11 | 13 | 17 |
| Worst J | 2731.2721 | 3471.7303 | 4194.8301 |
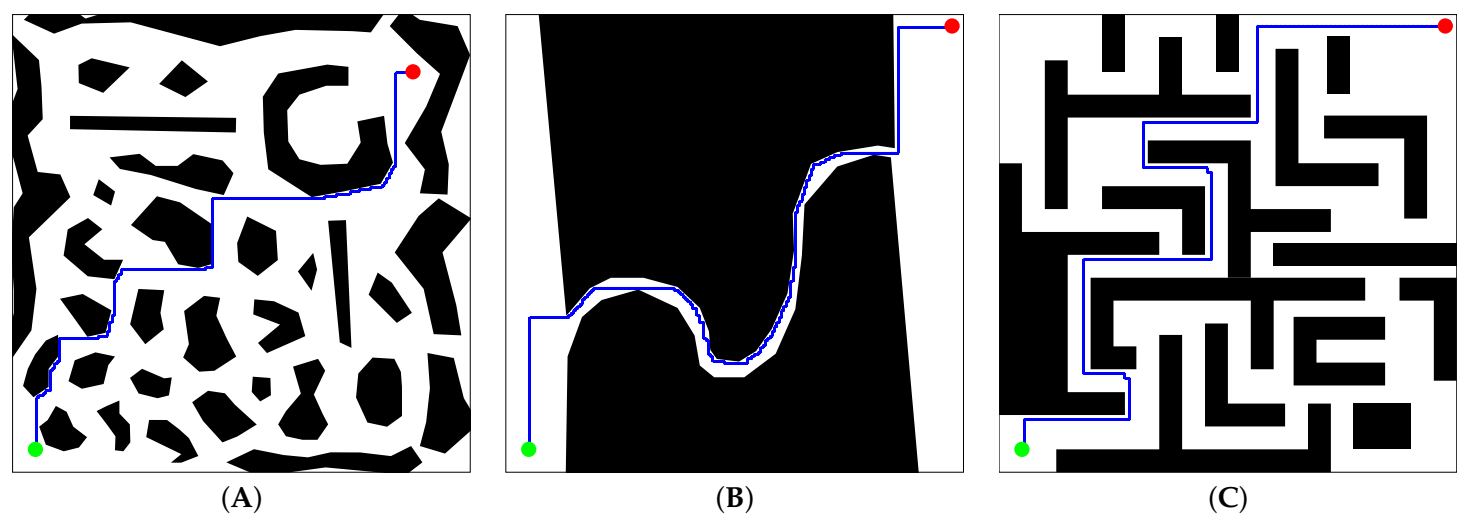
| Test Case | J (m) | |
|---|---|---|
| (A) | 166 | 3314.1421 |
| (B) | 219 | 4374.1421 |
| (C) | 232 | 4634.1421 |
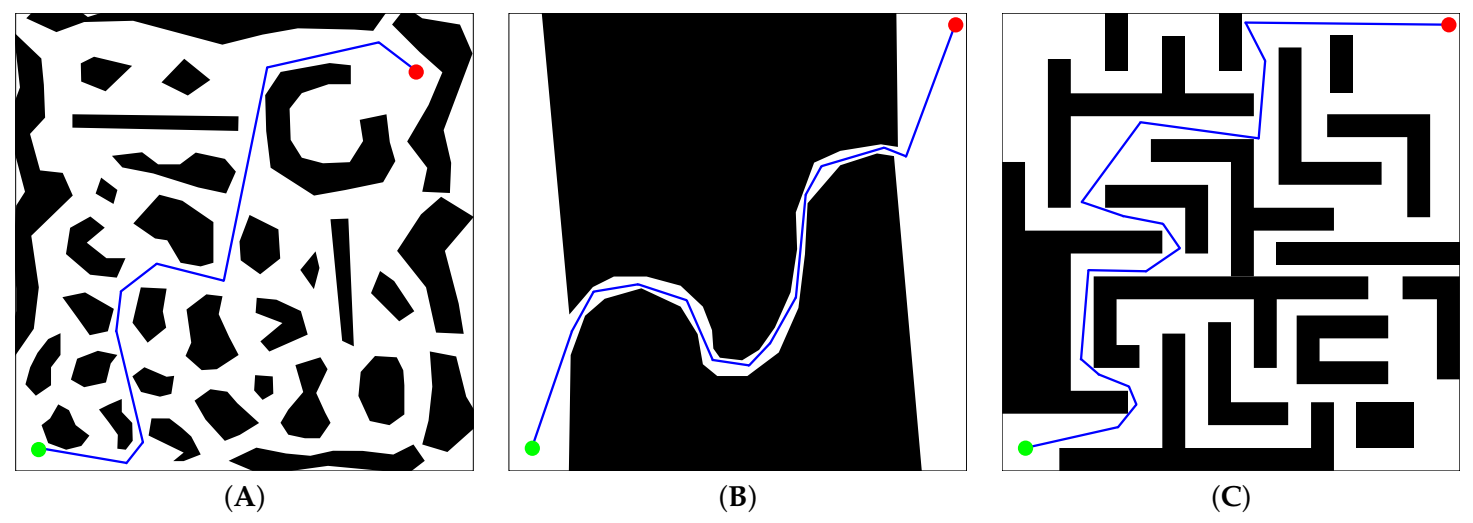
| Test Case | J (m) | |
|---|---|---|
| (A) | 8 | 3334.5370 |
| (B) | 12 | 3562.2011 |
| (C) | 15 | 4559.8692 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rodríguez-Molina, A.; Solís-Romero, J.; Villarreal-Cervantes, M.G.; Serrano-Pérez, O.; Flores-Caballero, G. Path-Planning for Mobile Robots Using a Novel Variable-Length Differential Evolution Variant. Mathematics 2021, 9, 357. https://doi.org/10.3390/math9040357
Rodríguez-Molina A, Solís-Romero J, Villarreal-Cervantes MG, Serrano-Pérez O, Flores-Caballero G. Path-Planning for Mobile Robots Using a Novel Variable-Length Differential Evolution Variant. Mathematics. 2021; 9(4):357. https://doi.org/10.3390/math9040357
Chicago/Turabian StyleRodríguez-Molina, Alejandro, José Solís-Romero, Miguel Gabriel Villarreal-Cervantes, Omar Serrano-Pérez, and Geovanni Flores-Caballero. 2021. "Path-Planning for Mobile Robots Using a Novel Variable-Length Differential Evolution Variant" Mathematics 9, no. 4: 357. https://doi.org/10.3390/math9040357
APA StyleRodríguez-Molina, A., Solís-Romero, J., Villarreal-Cervantes, M. G., Serrano-Pérez, O., & Flores-Caballero, G. (2021). Path-Planning for Mobile Robots Using a Novel Variable-Length Differential Evolution Variant. Mathematics, 9(4), 357. https://doi.org/10.3390/math9040357