High Order Two-Derivative Runge-Kutta Methods with Optimized Dispersion and Dissipation Error



Abstract
:1. Introduction
2. Background Theory
2.1. Two-Derivative Runge-Kutta Methods
2.2. Special TDRK Methods

2.3. Stability, Dispersion and Dissipation
3. Construction of the New Methods
3.1. Methods with 4 Stages
3.2. Methods with 5 Stages
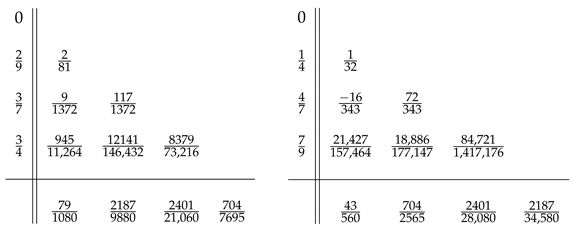
3.2.1. Method with Constant Coefficients
- Using second simplifying assumption (6) we eliminate for .
- Using third simplifying assumption (6) (except for the second component) we eliminate for . We have to set . Under this assumption the second condition for orders 5, 6 and 7 follow from the first condition.
- We solve the linear system equationsfor the and derive
- We solve the 3rd condition of order 6 for .
- We solve the 3rd and 4th conditions of order 7 for and .
- We solve for and the last condition of order 7 for .
- Finally we determine to minimize the next term of the amplification error
![Mathematics 09 00232 i004]()
{kind=link}
{kind=link}
{kind=link}
{kind=link}
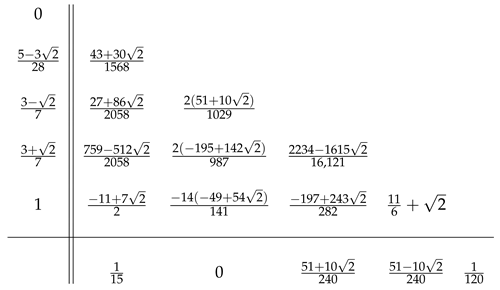
3.2.2. Method with Variable Coefficients
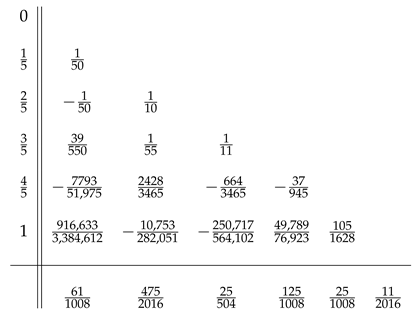
3.3. Methods with 6 Stages
- Using second simplifying assumption eliminate for .
- Choose .
- Solve the linear system equationsfor the for .
- Solve the remaining conditions for , , and .
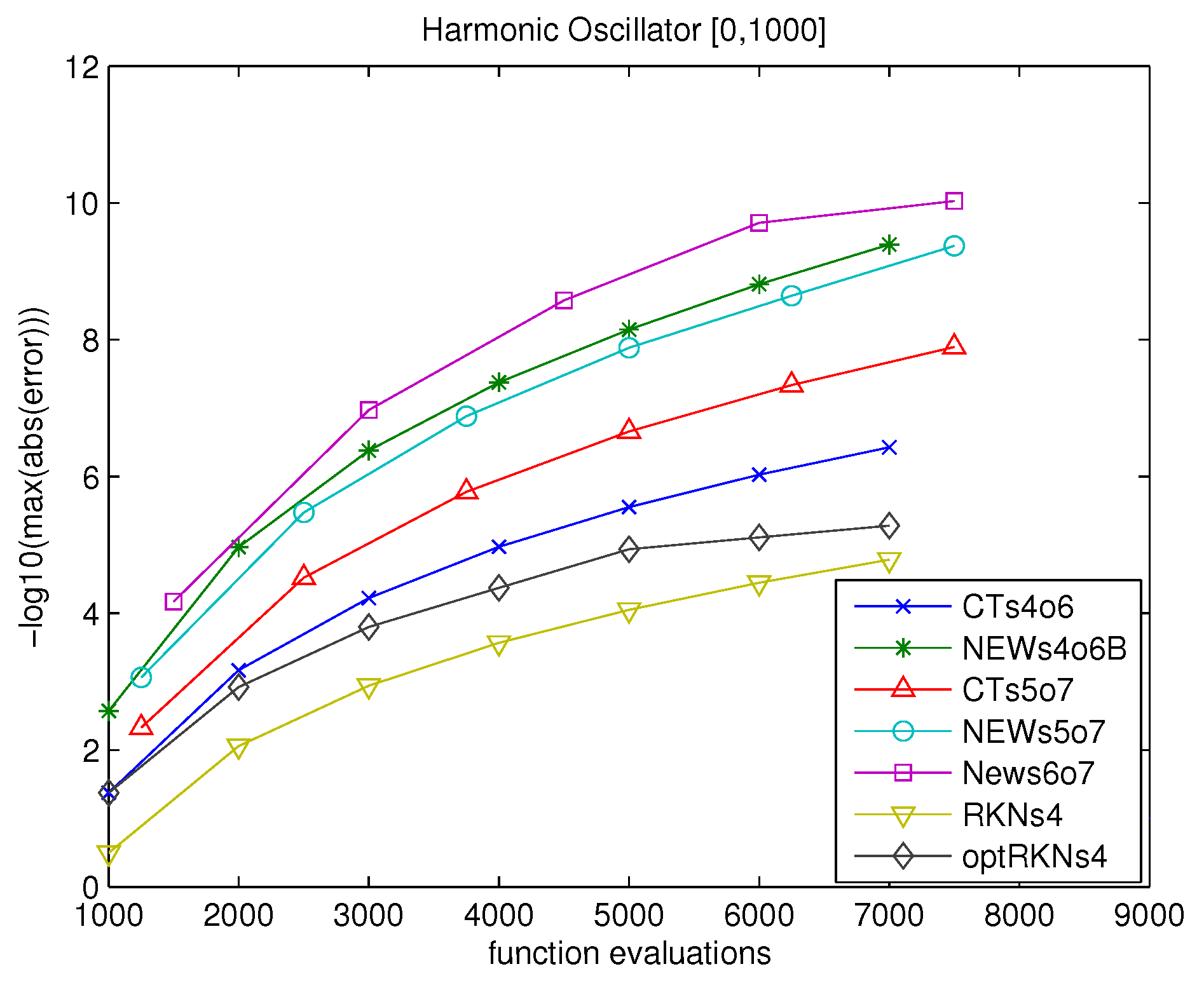
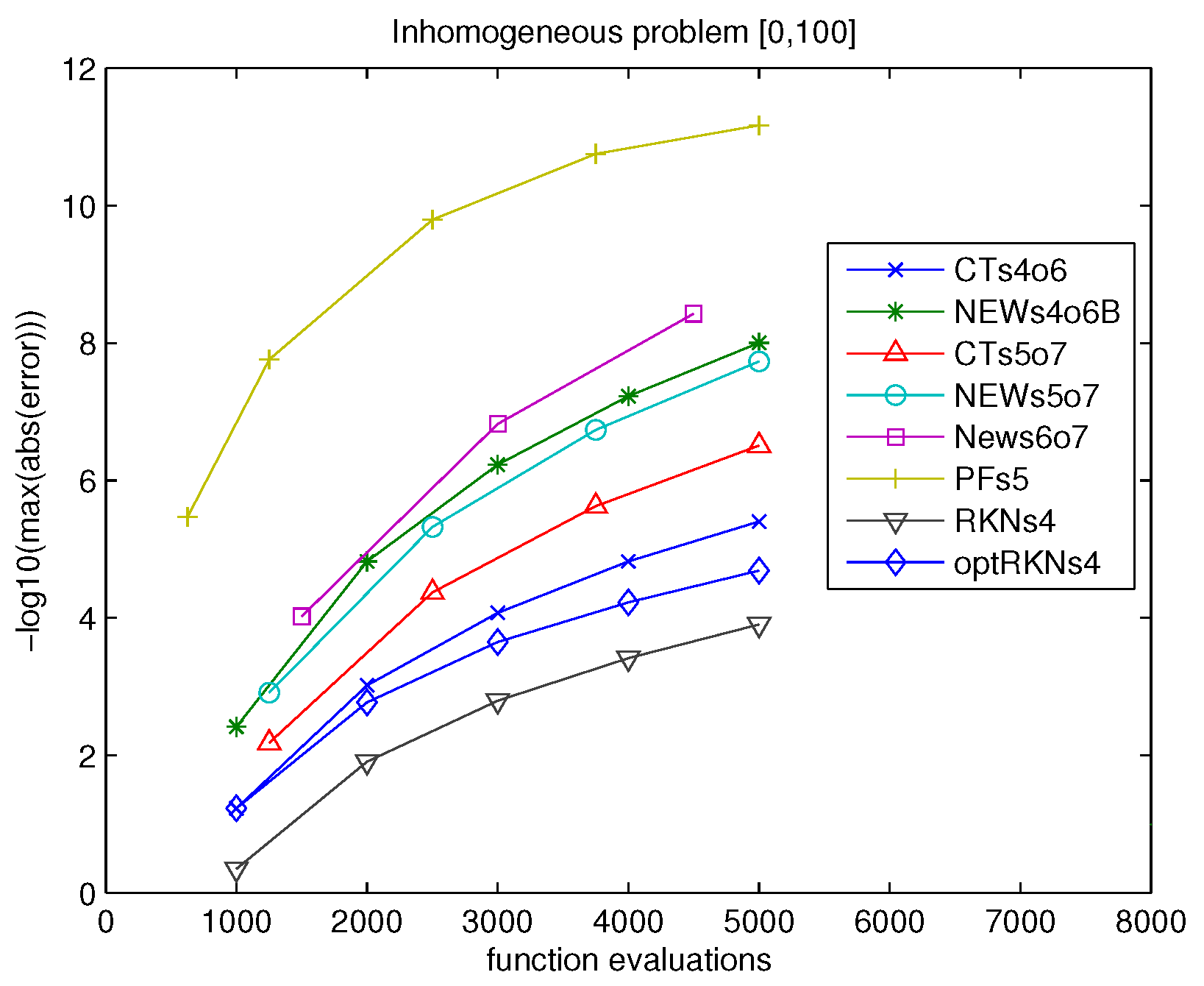
4. Numerical Results
- CTs4o6 the 6th order method with 4 stages in [1] (second method)
- CTs5o7 the 7th order method with 5 stages in [1] (first method)
- NEWs4o6B the new optimized 6th order method with 4 stages in Section 3.1 (second method)
- NEWs5o7 the new optimized 7th order method with 5 stages in Section 3.2.1
- NEWs6o7 the new optimized 7th order method with 6 stages in Section 3.3
- PFs5 the new phase-fitted and amplification-fitted method 5 stages in Section 3.2.2
- RKNs4 the 5th order Runge-Kutta-Nyström method with 4 stages ([33], p. 285)
- optRKNs4 the optimized Runge-Kutta-Nyström method with 4 stages, algebraic order 4 and phase-lag order 8 ([35]).
4.1. Problem 1
4.2. Problem 2
4.3. Problem 3
4.4. Problem 4
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Chan, R.P.K.; Tsai, A.Y.J. On explicit two-derivative Runge-Kutta methods. Numer. Alg. 2010, 53, 171–194. [Google Scholar] [CrossRef]
- Kastlunger, K.H.; Wanner, G. Runge Kutta Processes with Multiple nodes. Computing 1972, 9, 9–24. [Google Scholar] [CrossRef]
- Vigo-Aguiar, J.; Martín-Vaquero, J.; Ramos, H. Exponential fitting BDF–Runge–Kutta algorithms. Comput. Phys. Commun. 2018, 178, 15–34. [Google Scholar] [CrossRef]
- Ramos, H.; Vigo-Aguiar, J. On the frequency choice in trigonometrically fitted methods. Appl. Math. Lett. 2010, 23, 1378–1381. [Google Scholar] [CrossRef] [Green Version]
- Vigo-Aguiar, J.; Ramos, H. On the choice of the frequency in trigonometrically-fitted methods for periodic problems. J. Comput. Appl. Math. 2015, 277, 94–105. [Google Scholar] [CrossRef]
- Ramos, H.; Kalogiratou, Z.; Monovasilis, T.; Simos, T.E. An optimized two-step hybrid block method for solving general second order initial-value problems. Numer. Algor. 2016, 72, 1089–1102. [Google Scholar] [CrossRef]
- Simos, T.E.; Tsitouras, C. Explicit, ninth order, two step methods for solving inhomogeneous linear problems x(t) = Λx(t) + f(t). Appl. Numer. Math. 2020, 153, 344–351. [Google Scholar] [CrossRef]
- Kovalnogov, V.N.; Simos, T.E.; Tsitouras, C. Ninth-order, explicit, two-step methods for second order inhomogeneous linear IVPs. Math. Meth. Appl. Sci. 2020, 43, 4918–4926. [Google Scholar] [CrossRef]
- Alolyan, I.; Simos, T.E.; Tsitouras, C. Eighth-order, phase-fitted, four-step methods for solving y = f (x, y). Math. Meth. Appl. Sci. 2020, 43, 4016–4022. [Google Scholar] [CrossRef]
- Hou, C.-C.; Simos, T.E.; Famelis, I.T. Neural network solution of pantograph type differential equations. Math. Meth. Appl. Sci. 2020, 43, 3369–3374. [Google Scholar] [CrossRef]
- Medvedev, M.A.; Simos, T.E.; Tsitouras, C. Low-order, P-stable, two-step methods for use with lax accuracies. Math. Meth. Appl. Sci. 2019, 42, 6301–6314. [Google Scholar] [CrossRef]
- Medvedeva, M.A.; Simos, T.E.; Tsitouras, C. Trigonometric fitted modification of RADAU5. Math. Meth. Appl. Sci. 2020, 43, 1582–1589. [Google Scholar] [CrossRef]
- Lin, C.; Hsu, C.W.; Simos, T.E.; Tsitouras, C. Explicit, semi-symmetric, hybrid, six-step, eighth order methods for solving y = f (x, y). Appl. Comput. Math. 2019, 18, 296–304. [Google Scholar]
- Medvedeva, M.A.; Simos, T.E.; Tsitouras, C. Variable step-size implementation of the sixth-order Numerov-type methods. Math. Meth. Appl. Sci. 2020, 43, 1204–1215. [Google Scholar] [CrossRef]
- Alolyan, I.; Simos, T.E.; Tsitouras, C. Interpolants for sixth-order Numerov-type methods. Math. Meth. Appl. Sci. 2019, 42, 7349–7358. [Google Scholar] [CrossRef]
- Medvedev, M.A.; Simos, T.E.; Tsitouras, C. Local interpolants for Numerov-type methods and their implementation in variable step schemes. Math. Meth. Appl. Sci. 2019, 42, 7047–7058. [Google Scholar] [CrossRef]
- Fang, J.; Liu, C.; Simos, T.E.; Famelis, I.T. Neural network solution of single delay differential equations. Mediterr. J. Math. 2020, 17, 30. [Google Scholar] [CrossRef]
- Liu, C.; Hsu, C.-W.; Simos, T.E.; Tsitouras, C. Phase-fitted, six-step methods for solving x = f (t, x). Math. Meth. Appl. Sci. 2019, 42, 3942–3949. [Google Scholar] [CrossRef]
- Liu, C.; Hsu, C.-W.; Tsitouras, C.; Simos, T.E. Hybrid Numerov-type methods with coefficients trained to perform better on classical orbits. Bull. Malays. Math. Sci. Soc. 2019, 42, 2119–2134. [Google Scholar] [CrossRef]
- Lin, C.; Chen, J.J.; Simos, T.E.; Tsitouras, C. Evolutionary derivation of sixth-order P-stable SDIRKN methods for the solution of PDEs with the method of lines. Mediterr. J. Math. 2019, 16, 69. [Google Scholar] [CrossRef]
- Fang, J.; Liu, C.; Hsu, C.-W.; Simos, T.E.; Tsitouras, C. Explicit hybrid six-step, sixth order, fully symmetric methods for solving y = f (x, y). Math. Meth. Appl. Sci. 2019, 42, 3305–3314. [Google Scholar] [CrossRef]
- Medvedev, M.A.; Simos, T.E.; Tsitouras, C. Hybrid, phase-fitted, four-step methods of seventh order for solving x (t) = f (t, x). Math. Meth. Appl. Sci. 2019, 42, 2025–2032. [Google Scholar] [CrossRef]
- Medvedev, M.A.; Simos, T.E.; Tsitouras, C. Trigonometric-fitted hybrid four-step methods of sixth order for solving y (x) = f (x, y). Math. Meth. Appl. Sci. 2019, 42, 710–716. [Google Scholar] [CrossRef]
- Fang, Y.; You, X.; Ming, Q. Trigonometrically fitted two-derivative Runge-Kutta methods for solving oscillatory differential equations. Numer. Algor. 2014, 65, 651–667. [Google Scholar] [CrossRef]
- Monovasilis, T.; Kalogiratou, Z.; Simos, T.E. Trigonometrical fitting conditions for two derivative Runge Kutta methods. Numer. Algor. 2018, 79, 787–800. [Google Scholar] [CrossRef]
- Kalogiratou, Z.; Monovasilis, T.; Simos, T.E. Construction of two derivative Runge Kutta methods of order five. AIP Conf. Proc. 2017, 1863, 560092. [Google Scholar]
- Kalogiratou, Z.; Monovasilis, T.; Simos, T.E. New fifth-order two-derivative Runge-Kutta methods with constant and frequency-dependent coefficients. Math. Meth. Appl. Sci. 2019, 42, 1955–1966. [Google Scholar] [CrossRef]
- Ahmad, N.A.; Senu, N.; Ismail, F. Phase-Fitted and Amplification-Fitted Higher Order Two-Derivative Runge-Kutta Method for the Numerical Solution of Orbital and Related Periodical IVPs. Math. Probl. Eng. 2017, 2017, 1871278. [Google Scholar] [CrossRef]
- Fang, Y.; Zhang, Y.; Wang, P. Two-derivative Runge–Kutta methods with increased phase-lag and dissipation order for the Schrödinger equation. J. Math. Chem. 2018, 56, 1924–1934. [Google Scholar] [CrossRef]
- Kalogiratou, Z.; Monovasilis, T.; Simos, T.E. Two-derivative Runge-Kutta methods with optimal phase properties. Math. Meth. Appl. Sci. 2020, 43, 1267–1277. [Google Scholar] [CrossRef]
- Monovasilis, T.; Kalogiratou, Z.; Simos, T.E. Optimized two derivative Runge-Kutta methods for solving orbital and oscillatory problems. AIP Conf. Proc. 2019, 2116, 450107. [Google Scholar]
- Butcher, J.C. The Numerical Analysis of Ordinary Differential Equations; John Wiley Sons: Hoboken, NJ, USA, 1987. [Google Scholar]
- Hairer, E.; Norsett, S.; Wanner, G. Solving Ordinary Differential Equations I: Nonstiff Problems; Springer: Berlin/Heidelberg, Germany, 2002. [Google Scholar]
- Houwen, P.J.V.; Sommeijer, B.P. Explicit Runge-Kutta (-Nyström) methods with reduced phase errors for computing oscillating solutions. SIAM J. Numer. 1987, 24, 595–617. [Google Scholar] [CrossRef] [Green Version]
- Simos, T.E.; Dimas, E.; Sideridis, A.B. A Runge-Kutta-Nyström method for the numerical integration of special second-order periodic initial-value problems. J. Comput. Appl. Math. 1994, 51, 317–326. [Google Scholar] [CrossRef] [Green Version]
- Vigo-Aguiar, J.; Ramos, H. Dissipative Chebyshev exponential-fitted methods for numerical solution of second-order differential equations. J. Comput. Appl. Math. 2003, 158, 187–211. [Google Scholar] [CrossRef] [Green Version]
- Franco, J.M. A class of explicit two-step hybrid methods for second-order IVPs. J. Comput. Appl. Math. 2006, 187, 41–57. [Google Scholar] [CrossRef] [Green Version]
- Stiefel, E.; Bettis, D.G. Stabilization of Cowell’s method. Numer. Math. 1969, 13, 154–175. [Google Scholar] [CrossRef]


Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Monovasilis, T.; Kalogiratou, Z. High Order Two-Derivative Runge-Kutta Methods with Optimized Dispersion and Dissipation Error. Mathematics 2021, 9, 232. https://doi.org/10.3390/math9030232
Monovasilis T, Kalogiratou Z. High Order Two-Derivative Runge-Kutta Methods with Optimized Dispersion and Dissipation Error. Mathematics. 2021; 9(3):232. https://doi.org/10.3390/math9030232
Chicago/Turabian StyleMonovasilis, Theodoros, and Zacharoula Kalogiratou. 2021. "High Order Two-Derivative Runge-Kutta Methods with Optimized Dispersion and Dissipation Error" Mathematics 9, no. 3: 232. https://doi.org/10.3390/math9030232
APA StyleMonovasilis, T., & Kalogiratou, Z. (2021). High Order Two-Derivative Runge-Kutta Methods with Optimized Dispersion and Dissipation Error. Mathematics, 9(3), 232. https://doi.org/10.3390/math9030232