
Inverter Volt-Ampere Capacity Reduction by Optimization of the Traction Synchronous Homopolar Motor





Abstract
:1. Introduction
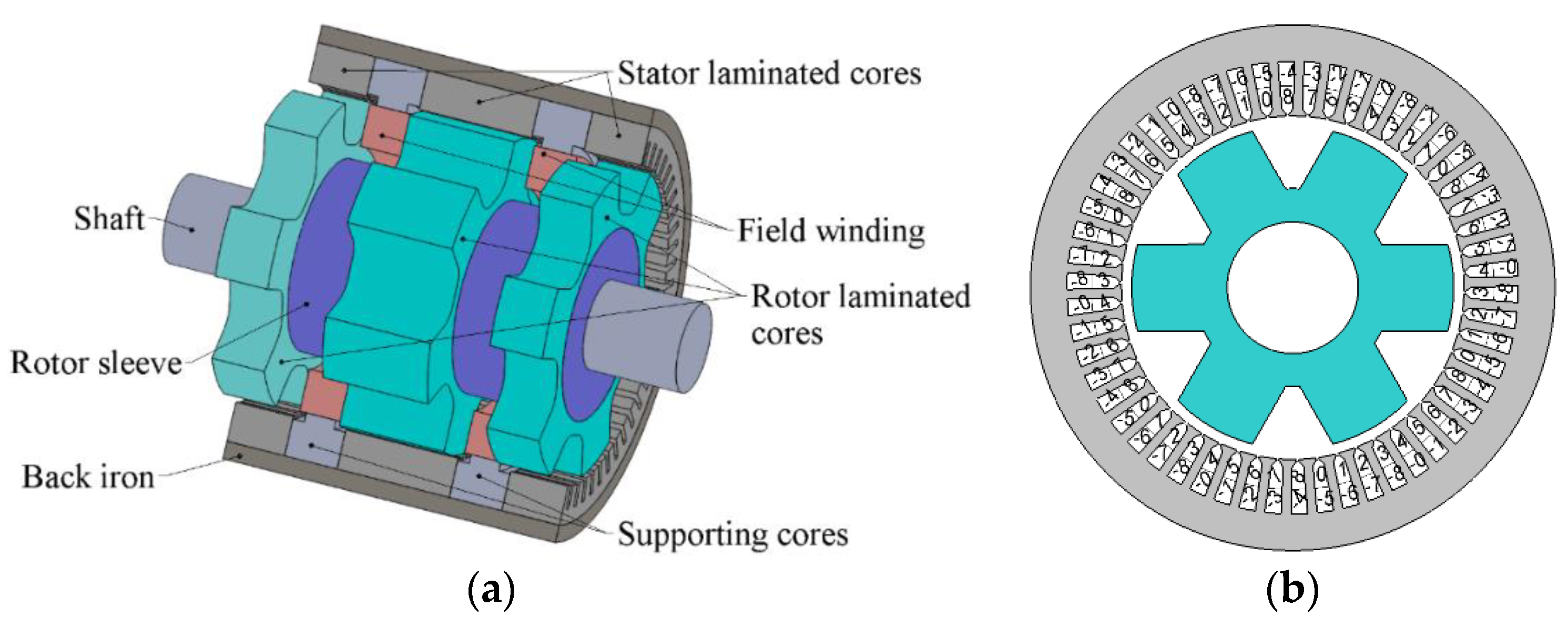
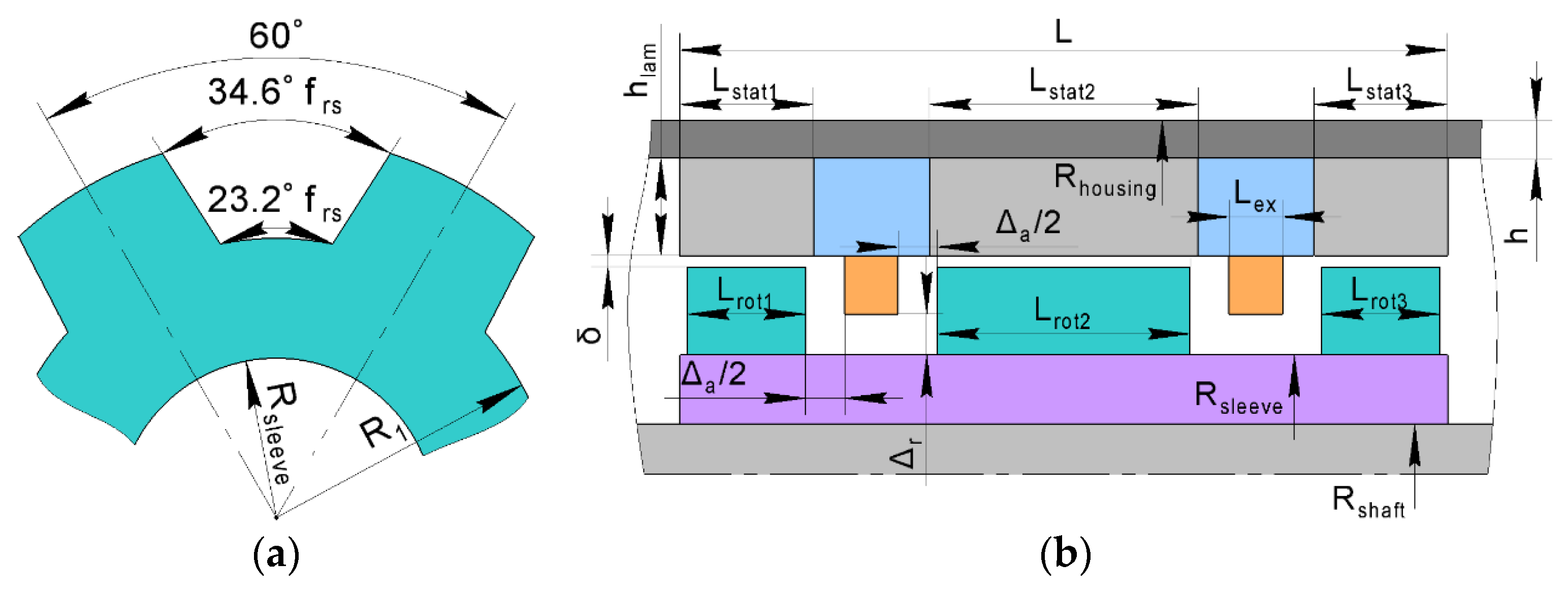
2. Geometry of the Traction SHM
3. Objective Function for Optimizing the Traction SHM
4. Initial Design Parameters and Variable Parameters Used for Optimizing the Traction SHM
5. Optimization of Traction HSM Using the Nelder–Mead Method
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Kalsi, S.; Hamilton, K.; Buckley, R.G.; Badcock, R.A. Superconducting AC Homopolar Machines for High-Speed Applications. Energies 2019, 12, 86. [Google Scholar] [CrossRef] [Green Version]
- Bianchini, C.; Immovilli, F.; Bellini, A.; Lorenzani, E.; Concari, C.; Scolari, M. Homopolar generators: An overview. In Proceedings of the 2011 IEEE Energy Conversion Congress and Exposition, Phoenix, AZ, USA, 17–22 September 2011; pp. 1523–1527. [Google Scholar] [CrossRef]
- Dmitrievskii, V.; Prakht, V.; Anuchin, A.; Kazakbaev, V. Design Optimization of a Traction Synchronous Homopolar Motor. Mathematics 2021, 9, 1352. [Google Scholar] [CrossRef]
- Dmitrievskii, V.; Prakht, V.; Anuchin, A.; Kazakbaev, V. Traction Synchronous Homopolar Motor: Simplified Computation Technique and Experimental Validation. IEEE Access 2020, 8, 185112–185120. [Google Scholar] [CrossRef]
- Ye, C.; Yang, J.; Xiong, F.; Zhu, Z.Q. Relationship between homopolar inductor machine and wound-field synchronous machine. IEEE Trans. Ind. Electron. 2020, 67, 919–930. [Google Scholar] [CrossRef] [Green Version]
- Yang, J.; Ye, C.; Liang, X.; Xu, W.; Xiong, F.; Xiang, Y.; Li, W. Investigation of a Two-Dimensional Analytical Model of the Homopolar Inductor Alternator. IEEE Trans. Appl. Supercond. 2018, 28, 5205205. [Google Scholar] [CrossRef] [Green Version]
- Belalahy, C.; Rasoanarivo, I.; Sargos, F. Using 3D reluctance network for design a three phase synchronous homopolar machine. In Proceedings of the 2008 34th Annual Conference of IEEE Industrial Electronics, Orlando, FL, USA, 10–13 November 2008; pp. 2067–2072. [Google Scholar] [CrossRef]
- Cupertino, F.; Pellegrino, G.; Gerada, C. Design of synchronous reluctance machines with multiobjective optimization algorithms. IEEE Trans. Ind. Appl. 2014, 50, 3617–3627. [Google Scholar] [CrossRef] [Green Version]
- Krasopoulos, C.T.; Beniakar, M.E.; Kladas, A.G. Robust Optimization of High-Speed PM Motor Design. IEEE Trans. Magn. 2017, 53, 1–4. [Google Scholar] [CrossRef]
- Prakht, V.; Dmitrievskii, V.; Kazakbaev, V. Optimal Design of Gearless Flux-Switching Generator with Ferrite Permanent Magnets. Mathematics 2020, 8, 206. [Google Scholar] [CrossRef] [Green Version]
- Anuchin, A. Development of Digital Systems for Efficient Control of Traction Electric Equipment for Hybrid Electric Vehicles. Ph.D. Thesis, Moscow Power Engineering Institute, Moscow, Russia, 2018; pp. 1–445. Available online: https://mpei.ru/diss/Lists/FilesDissertations/365-%D0%94%D0%B8%D1%81%D1%81%D0%B5%D1%80%D1%82%D0%B0%D1%86%D0%B8%D1%8F.pdf (accessed on 10 October 2021). (In Russian).
- FF1000R17IE4, IGBT-Modules, Technical Information, Revision 3.2, Infineon. November 2013. Available online: https://www.infineon.com/dgdl/Infineon-FF1000R17IE4-DS-v03_02-EN.pdf?fileId=db3a30431ff9881501201dc994a34980 (accessed on 10 October 2021).
- FF650R17IE4, IGBT-Modules, Technical Information, Revision 3.3, Infineon. November 2013. Available online: https://www.infineon.com/dgdl/Infineon-FF650R17IE4-DS-v03_03-EN.pdf?fileId=db3a30431ff9881501201dcfe2a54986 (accessed on 10 October 2021).
- Nelder, J.A.; Mead, R. A Simplex Method for Function Minimization. Comput. J. 1965, 7, 308–313. [Google Scholar] [CrossRef]
- IGBT Modules. Product Description. Available online: https://www.infineon.com/cms/en/product/power/igbt/igbt-modules/ (accessed on 10 October 2021).


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
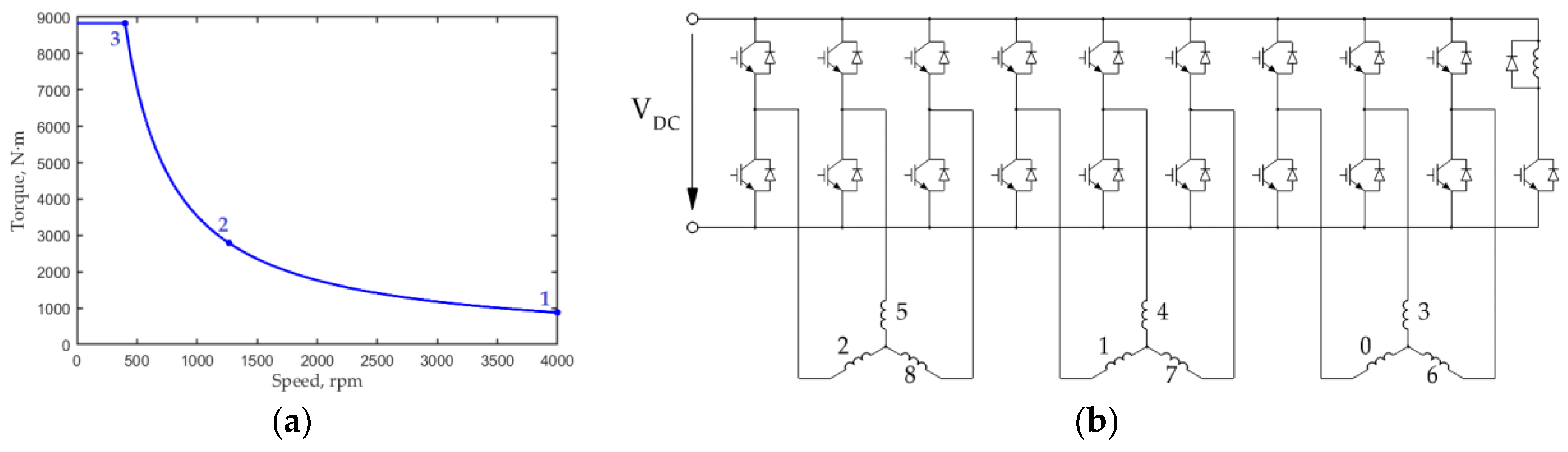
| Mode Number | Torque, N∙m | Rotational Speed, rpm | Mechanical Power, kW |
|---|---|---|---|
| 1 | 883 | 4000 | 370 |
| 2 | 2793 | 1265 | 370 |
| 3 | 8833 | 400 | 370 |
| Parameter | Value [4] |
|---|---|
| Machine length without end winding parts L, mm | 545 |
| Lengths of the stator stacks, Lstat1; Lstat2; Lstat3, mm | 101; 197; 101 |
| The lengths of the rotor stacks, Lrot1; Lrot2; Lrot3, mm | 92; 184; 92 |
| Axial clearance between excitation winding and rotor, Δa, mm | 30 |
| Radial clearance between field winding and rotor Δr, mm | 27 |
| Rotor yoke thickness R1-Rsleeve, mm | 22.8 |
| Shaft radius Rshaft, mm | 70 |
| Stator lamination height hlam, mm | 65 |
| External radius of the stator housing Rhousing, mm | 367 |
| Parameter | Initial Value before the Optimization [4] |
|---|---|
| Housing thickness h, mm | 36 |
| Total stator stacks length Lstator, mm | 399 |
| Airgap width δ, mm | 2.3 |
| Rotor slot factor frs | 1 |
| Angles of field weakening at operating points 1,2,3, electrical radians | 0.61; 0.3; 0.25 |
| Magnetic monopole densities at operating points 1,2,3, Wb/m | 0.48; 0.63; 1.2 |
| Parameter | SHM Prototype Described in [4] | New Initial Design |
|---|---|---|
| Number of turns per stator armature layer | 5 | 7 |
| Number of parallel strands per turn of the stator armature coil | 2 | 2 |
| Dimensions of armature wire winding, mm2 | 3.15 × 4.5 | 2.5 × 4.5 |
| The height of the stator slot part filled with the wire, mm | 36.4 | 41.1 |
| Excitation winding resistance, Ohm | 10.2 | 16.8 |
| Value | SHM Prototype Described in [4] | New Initial Design (before the Optimization) | ||||||
|---|---|---|---|---|---|---|---|---|
| Operating point | 1 | 2 | 3 | Brake mode | 1 | 2 | 3 | Brake mode |
| Speed, rpm | 4000 | 1265 | 400 | 1100 | 4000 | 1265 | 400 | 1100 |
| Current, A ampl | 197 | 408 | 886 | 643 | 142 | 296 | 669 | 485 |
| Mechanical power, kW | 370 | 370 | 370 | –540 | 370 | 370 | 370 | –540 |
| Active power, kW | 412 | 387 | 404 | –508 | 412 | 387 | 405 | −509 |
| Efficiency, % | 89.8 | 95.4 | 90.0 | 93.8 | 89.8 | 95.3 | 89.8 | 94.0 |
| Total losses, kW | 41.9 | 18.0 | 41.0 | 32.2 | 42.2 | 18.1 | 42.1 | 32.4 |
| Power factor | 0.99 | 0.82 | 0.91 | −0.65 | 0.99 | 0.81 | 0.88 | −0.62 |
| Line voltage, V ampl | 940 | 472 | 196 | 462 | 1303 | 661 | 272 | 642 |
| Not symmetrized torque ripple, N∙m | 71.9 | 61.5 | 24.1 | 42.1 | 71.9 | 62.1 | 24.1 | 43.5 |
| Symmetrized torque ripple, N∙m | 21.0 | 12.4 | 2.8 | 8.4 | 20.8 | 12.3 | 2.6 | 8.1 |
| Excitation current, A | 5.6 | 8.1 | 26.3 | 10.7 | 5.5 | 8.1 | 24.8 | 10.8 |
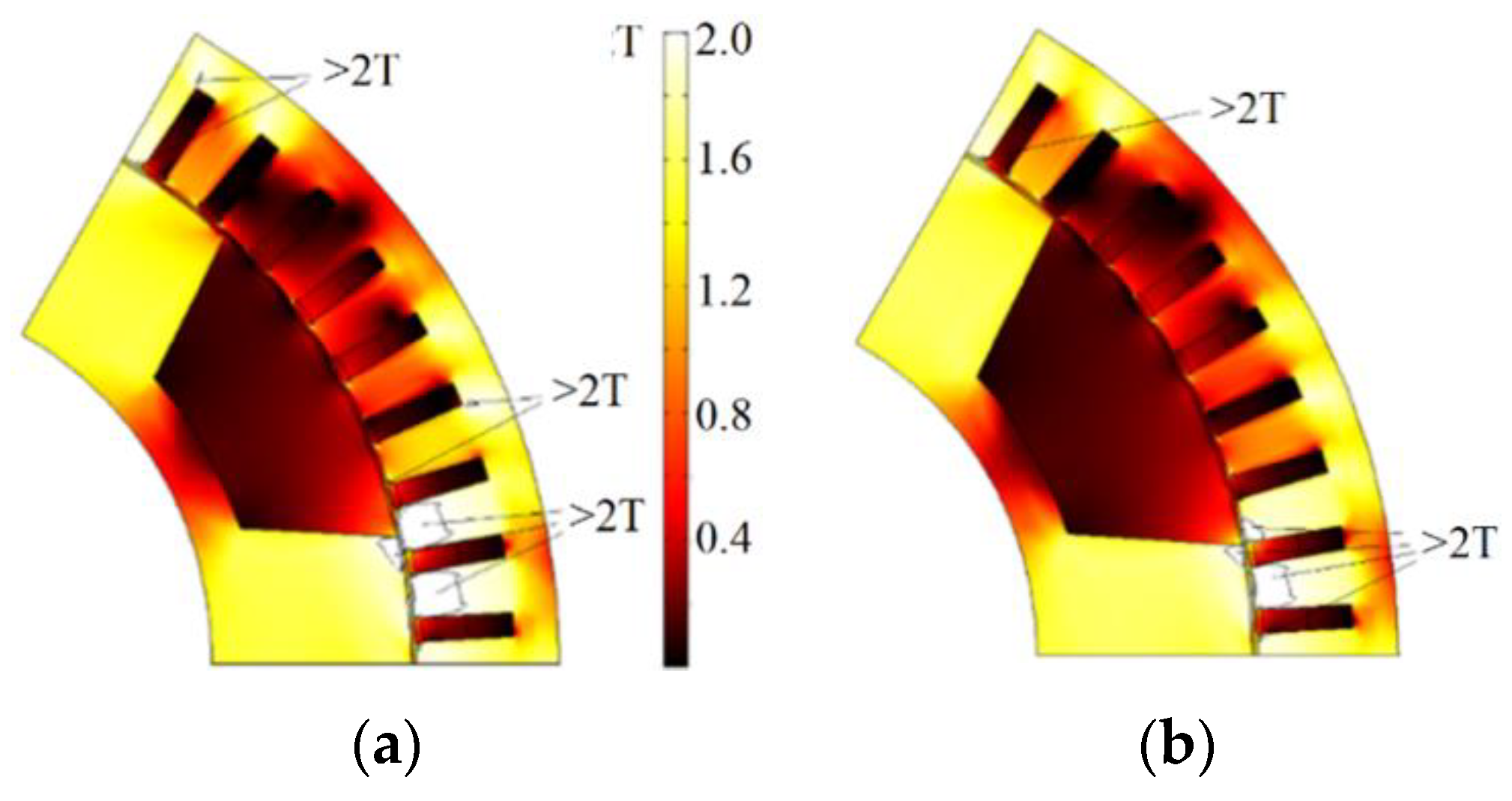
| Flux density in non-laminated parts of the magnetic core, T | 0.59 | 0.77 | 1.46 | 0.77 | 0.59 | 1.04 | 1.65 | 0.98 |
| Parameter | Optimal Design |
|---|---|
| Housing thickness h, mm | 32.8 |
| Total stator stacks length Lstator, mm | 431 |
| Airgap width δ, mm | 2.41 |
| Rotor slot factor frs | 1.10 |
| Angles of field weakening at operating points 1,2,3, electrical radians | 0.762; 0.400; 0.364 |
| Magnetic monopole densities at operating points 1,2,3, Wb/m | 0.331; 0.678; 1.139 |
| Value | New Initial Design (Before the Optimization) | After Optimization | ||||||
|---|---|---|---|---|---|---|---|---|
| Operating point | 1 | 2 | 3 | Brake mode | 1 | 2 | 3 | Brake mode |
| Speed, rpm | 4000 | 1265 | 400 | 1100 | 4000 | 1265 | 400 | 1100 |
| Current, A ampl | 142 | 296 | 669 | 485 | 176 | 255 | 601 | 429 |
| Mechanical power, kW | 370 | 370 | 370 | –540 | 370 | 370 | 370 | –540 |
| Mechanical losses, kW | 17.57 | 0.65 | 0.05 | 0.45 | 17.57 | 0.65 | 0.05 | 0.45 |
| Conductive winding losses, kW | 1.4 | 6.1 | 30.9 | 16.2 | 2.1 | 4.5 | 25.0 | 12.7 |
| Eddy-current winding losses, kW | 5.2 | 2.5 | 1.1 | 4.3 | 6.0 | 2.1 | 1.0 | 3.8 |
| Stator core losses, kW | 15.1 | 7.5 | 2.4 | 9.4 | 10.9 | 5.9 | 2.5 | 8.2 |
| Rotor core losses, kW | 2.5 | 0.6 | 0.1 | 0.6 | 1.5 | 0.6 | 0.1 | 0.5 |
| Excitation losses, kW | 0.4 | 0.8 | 7.5 | 1.4 | 0.5 | 1.5 | 11.9 | 2.0 |
| Active power, kW | 412 | 387 | 405 | −509 | 408 | 384 | 399 | −514 |
| Efficiency, % | 89.8 | 95.3 | 89.8 | 94.0 | 90.5 | 96.1 | 90.1 | 94.9 |
| Total losses (motor), kW | 42.2 | 18.1 | 42.1 | 32.4 | 38.7 | 15.2 | 40.5 | 27.6 |
| Line voltage, V ampl | 1303 | 661 | 272 | 642 | 988 | 632 | 275 | 621 |
| Symmetrized torque ripple, N∙m | 20.8 | 12.3 | 2.6 | 8.1 | 18.9 | 12.5 | 3.0 | 9.4 |
| Excitation current, A | 5.5 | 8.1 | 24.8 | 10.8 | 5.5 | 9.5 | 26.6 | 10.8 |
| Flux density in non-laminated parts of the magnetic core, T | 0.59 | 0.77 | 1.46 | 0.77 | 0.48 | 0.98 | 1.65 | 0.91 |
| Power factor | 0.99 | 0.81 | 0.88 | −0.62 | 0.97 | 0.96 | 0.96 | −0.74 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Prakht, V.; Dmitrievskii, V.; Anuchin, A.; Kazakbaev, V. Inverter Volt-Ampere Capacity Reduction by Optimization of the Traction Synchronous Homopolar Motor. Mathematics 2021, 9, 2859. https://doi.org/10.3390/math9222859
Prakht V, Dmitrievskii V, Anuchin A, Kazakbaev V. Inverter Volt-Ampere Capacity Reduction by Optimization of the Traction Synchronous Homopolar Motor. Mathematics. 2021; 9(22):2859. https://doi.org/10.3390/math9222859
Chicago/Turabian StylePrakht, Vladimir, Vladimir Dmitrievskii, Alecksey Anuchin, and Vadim Kazakbaev. 2021. "Inverter Volt-Ampere Capacity Reduction by Optimization of the Traction Synchronous Homopolar Motor" Mathematics 9, no. 22: 2859. https://doi.org/10.3390/math9222859
APA StylePrakht, V., Dmitrievskii, V., Anuchin, A., & Kazakbaev, V. (2021). Inverter Volt-Ampere Capacity Reduction by Optimization of the Traction Synchronous Homopolar Motor. Mathematics, 9(22), 2859. https://doi.org/10.3390/math9222859