1. Introduction
The absolute location of a ground vehicle is the starting point for any autonomous movement and it is of vital importance to reduce the error in the accuracy of GPS receivers to ensure the safety of passengers. The main objective of this work is to obtain an intelligent system capable of improving the accuracy in the estimation of the absolute position of a land vehicle without relying on high-cost sensors or hardware with high computational power, as a first step to develop a low-cost autonomous electric navigation car.
On the other hand, the reduction of the triangulation error to calculate the location of the GPS receiver is the most outstanding contribution of this work, since the average accuracy of the estimated location is increased from 3 m to 30 cm. However, it also contributes from the electronic point of view, since simple logical operations, addition, and division, are used to implement the fuzzy system in a small embedded system such as the Raspberry Pi 3 in a simple way. Compared to Kalman filters, it is not necessary to know the nature of the noise. Moreover, because the fuzzy system has a structure that converts numerical values to logical rules and vice versa, the knowledge base can be easily understood, which is in contrast to neural networks [
1].
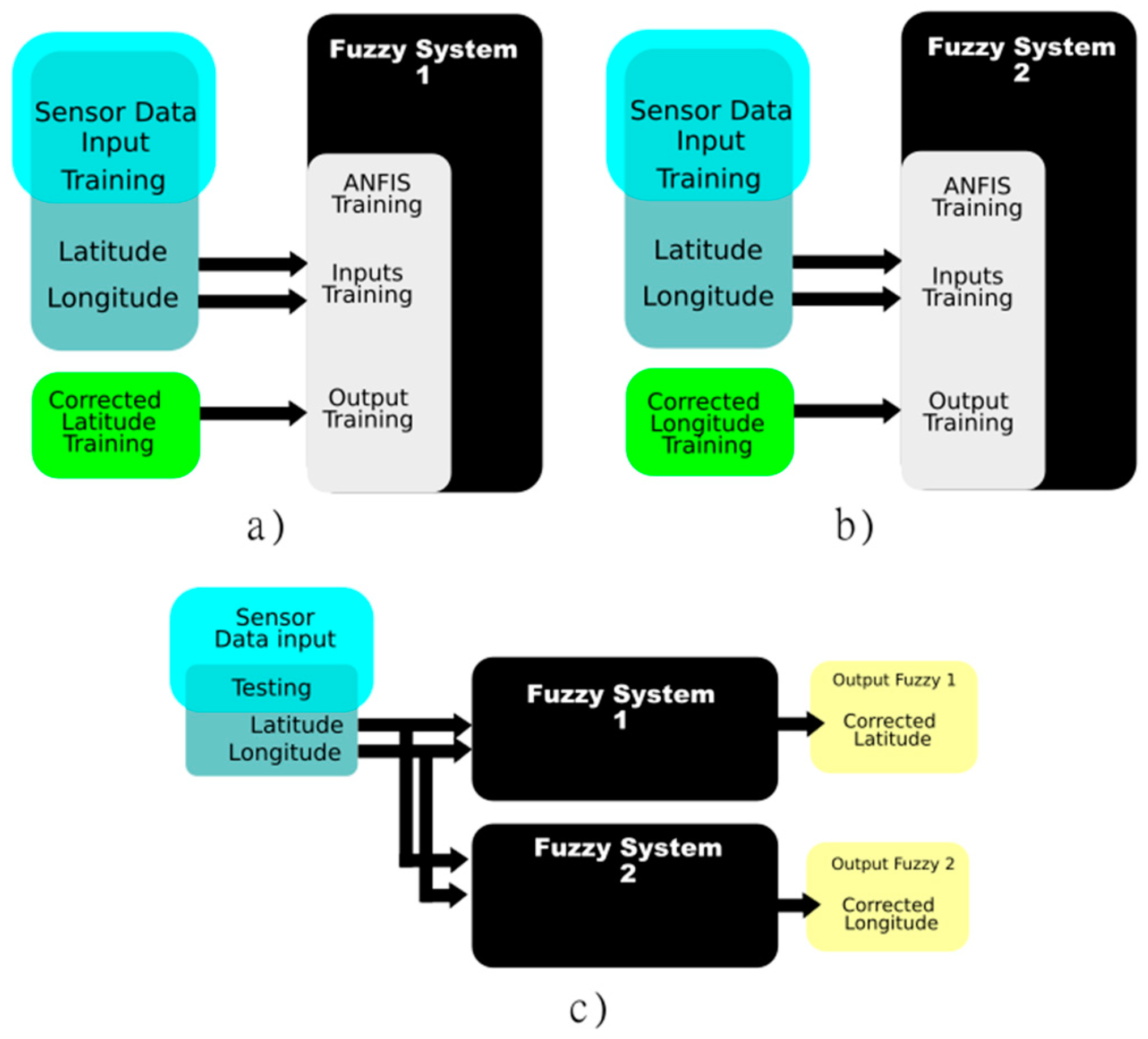
The proposal of the present work consists of implementing a pair of fuzzy systems that have the direct responsibility of correcting the latitude and longitude coordinate coming from the GPS sensor, avoiding complex mathematical operations, and obtaining a complete location system embedded in an electric car. Contrasting with what is found in the state of the art where it is more common to find fuzzy logic as a tool of artificial intelligence complementary to more classical techniques in the subject of location and tracking of land vehicles such as the Kalman filter. For example, in [
2], the unscented Kalman filter (UKF) is combined with the unscented H-infinity (UH) filter in order to reduce the accuracy error when tracking the position of a ground vehicle as it travels along a defined route. This system uses fuzzy logic to automatically weight whether the UKF or the UH will act at a given instant along that route, presenting an error reduction of approximately 5.6% in the estimation, with respect to that of the pure UKF, improving the accuracy of the GPS receiver.
In [
3], the design of a fuzzy system that adaptively modifies the extended Kalman filter (EKF) noisy covariances by fusing data from GPS, IMU, an odometer (at each wheel) and the mathematical model of the vehicle is shown. In this work, an improvement (on average) in the accuracy of the absolute position of the vehicle of about 49% is shown, making the response of the proposed algorithm superior to that of the original Kalman filter. Similarly, in [
4] there is a four-wheeled robot where the EKF is used to fuse data from a GPS, IMU, odometers on the wheels, and additionally a camera on the front of the robot; a fuzzy system is designed to modify the noisy covariances of the EKF. The main objective of this proposal is to strengthen the accuracy in the estimation of the trajectory to be followed by the robot, achieving an average accuracy improvement of 80.6% with respect to the EKF correction. On the other hand, [
5] seeks to improve the movement of a two-wheeled robot in environments with many obstacles. This is done by using measurements from a GPS sensor and an adaptive neuro-fuzzy inference system (ANFIS) as control techniques; obtaining a system capable of evading obstacles and estimating the best route for the robot to travel.
In parallel, other artificial intelligence techniques are also currently being applied to improve the response of the Kalman filter. As in [
6] where they propose the use of a recurrent neural network (RNN) to adaptively modify the input values of a network real-time kinematic (NRTK) that fuses data from a GPS and an IMU and the kinematic model of the car in real time. This is done in order to improve the tracking of the trajectory of a car with an embedded sensor system, reducing the location accuracy error to 67.71% on average. In [
7], the authors use the variation of the Kalman filter, the cubature Kalman filter (CKF), to adaptively modify the noisy covariances creating the strong tracking cubature Kalman filter. The algorithm proposed in this work manages to improve the position estimation of a vehicle with GPS and IMU sensors coupled, obtaining an average error reduction of 56% with respect to the original version of the CFK when traveling along a route. On the other hand, in [
8] a classification algorithm is developed that combines a convolutional neural network (CNN) mathematical model of different types of vehicles and data coming from a GPS sensor to analyze the trajectory travelled by the sensor to determine what type of vehicle is making the journey. The authors report a classification accuracy of over 74%.
Again in [
9], the authors present a fuzzy logic system capable of determining the position of a moving robot in a shaded indoor environment (such as a tunnel or a covered car park). Using GPS data and analyzing the chromaticity and frequency-component ratio of the LED lights installed in the ceiling and compared to a navigation potential system. The fuzzy system achieves, in the best case, an advantage of up to 89%. Similarly, in [
10], a combination of fuzzy logic and optimal control theory is proposed to control the motors of a racing car and achieve its displacement along a specific route without a driver. This is done by taking advantage of the data provided by a GPS sensor, calculating the vehicle’s yaw angle and using the mathematical model of the car. In this work, the authors achieve a 30% improvement in the accuracy of vehicle trajectory tracking. In [
11], a GPS sensor is used as a reference and an inertial measurement unit (IMU) delivers data to an inertial navigation system (INS) to reconstruct a trajectory. The INS by itself has a significant error and to reduce it an ANFIS is used which has as inputs the IMU data and the error between the INS and the GPS and as output delivers a corrected estimate of the INS. The authors manage to reduce the INS error by up to 9.83%.
In [
12], a GPS receiver delivers data to an extended Kalman filter (EKF) to track the position of a car as it travels along a defined route. The EKF alone is not good at estimating the position of the vehicle when the GPS receives poor signals from the satellites. The authors propose a fuzzy system that adaptively adjusts the internal parameters of the Kalman filter, such as the noisy covariances, to improve its estimates when the GPS has a weak signal. The authors manage to improve vehicle tracking in adverse conditions for the GPS sensor by up to 70%. In [
13], by exploiting the fusion of data from an INS and a GNSS sensor attached to a vehicle, the authors present a new fuzzy strong-tracking curbature Kalman filter (FSTCKF) algorithm to improve the CKF response using a fuzzy logic system and reduce the vehicle trajectory estimation error by 72.3%.
On the other hand, in [
14], an algorithm is proposed that joins model free adaptive control (MFAC) and particle swarm optimization (PSO) techniques to improve the position tracking of unmanned ground vehicles. For this, they have a GPS, a sensor to measure the angle of rotation of the wheel (which are fused by the mathematical model of the car) and an INS. The authors propose a control algorithm that estimates the heading angle (or direction that the vehicle should have in an instant of time) obtaining a high precision in both the estimation of the angle and the tracking of the vehicle’s path. In contrast, in [
15], the authors use ultra-wideband (UWB) technology to improve the localization and tracking accuracy of unmanned ground vehicles (UGV). Three UWB base stations are used as a cluster in a 2D space for localization. Here, by collecting data from multiple tests, they developed an algorithm composed of PSO techniques and genetic algorithms (GA) to implement multiple groups of UWB base stations. The authors report UGV position estimation accuracies between 20 cm and 60 cm. Finally, in [
16], they have a GPS sensor and an IMU as input to an extended Kalman filter with an adaptation mechanism to remove noise coming from the IMU and guarantee a better INS response. The authors also develop a deep learning framework with multiple short to long term memory modules (multi-LSTM) to predict the vehicle position increment based on the Gaussian mixture model (GMM) and the Kullback–Leibler (KL) distance. They then combine both algorithms to optimize the estimation of a vehicle’s position achieving an error reduction of up to 93.9%.
In
Section 2, the experiments performed are presented; in
Section 3, it is shown how the absolute position correction fuzzy system was designed; in
Section 4, the design to implement the UKF filter to compare its response with the proposed fuzzy system is exposed; in
Section 5, the results are shown with their discussion and finally in
Section 6, the conclusions are presented.
4. Discussion
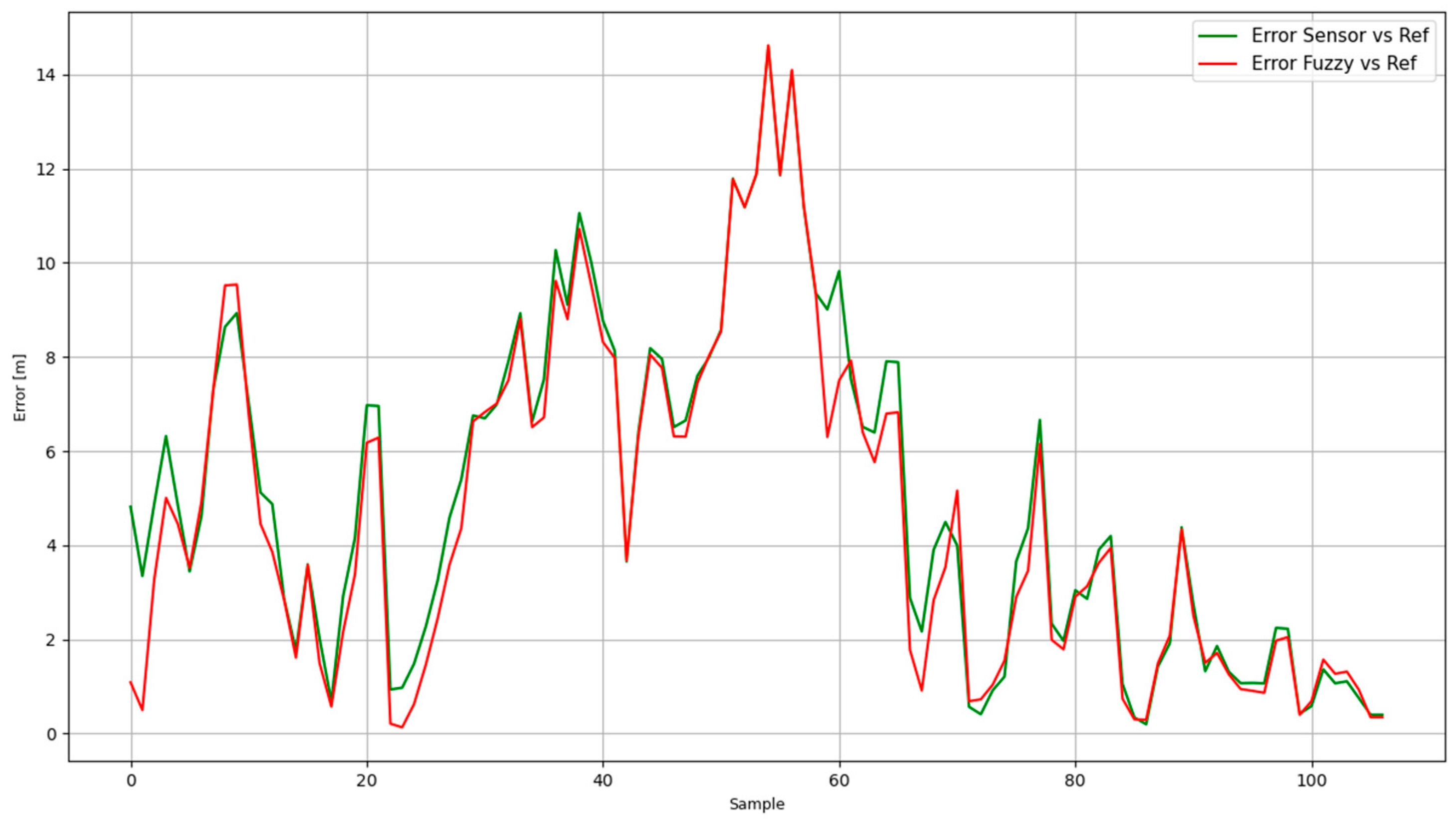
According to the results, the Kalman filter manages to reduce errors with decent performance but needs—as input—data to the covariance matrix that implicitly contains information on noise parameters. On the other hand, the fuzzy system managed to reduce the error in a better way without knowing the type of noise of the system because it was trained in the data region, making it easier and cheaper to implement with respect to works found in the state of the art. The main disadvantage is that, in order to better exploit the performance of the systems, retraining needs to be deployed in order to adjust the parameters of the membership functions when they are tested in geographical areas that are far away from the original data. The main limitation of the proposed fuzzy systems is that: if the error in the GPS measurements is too large, the correction of the GPS measurements will no longer be as effective.
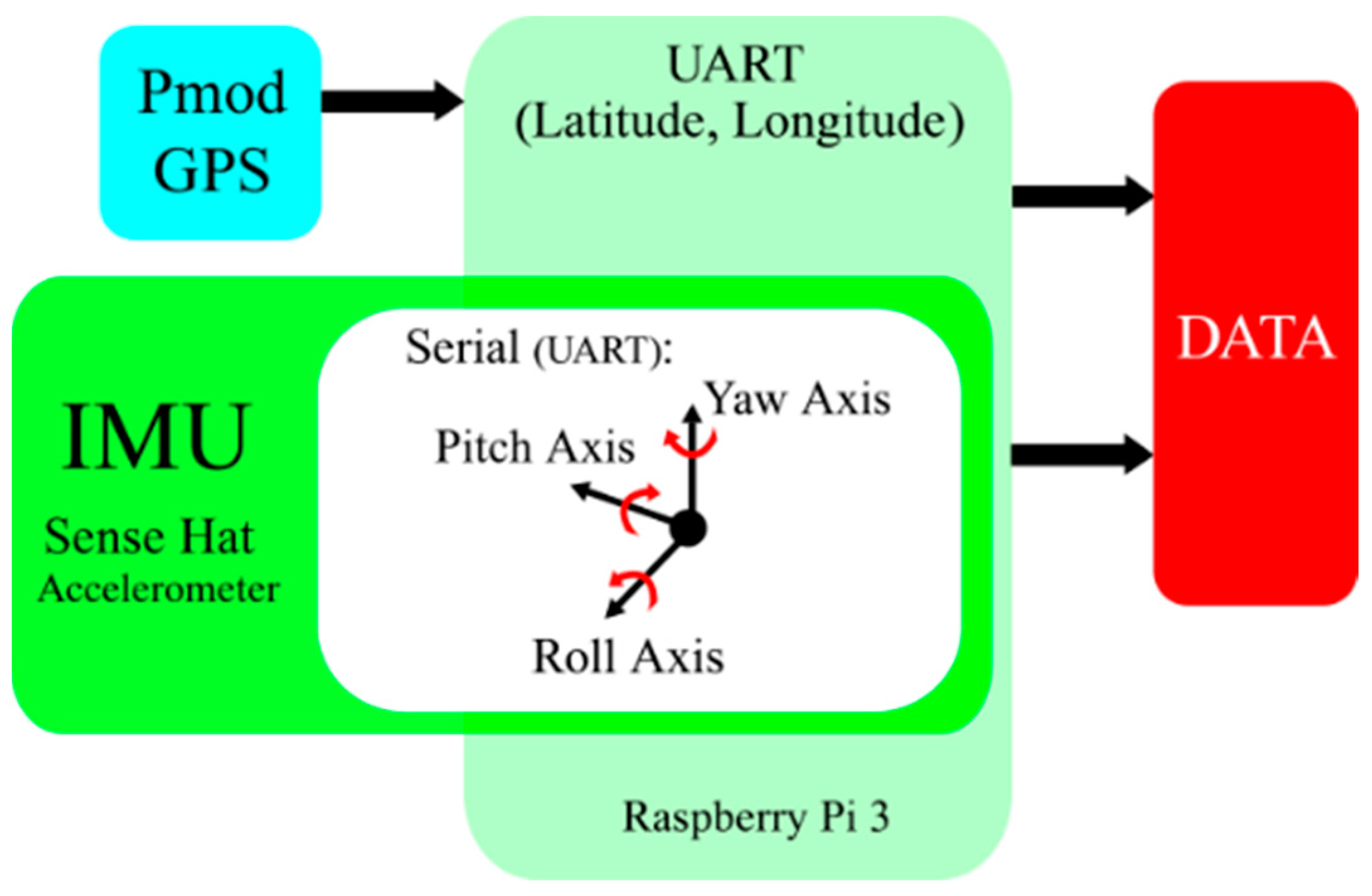
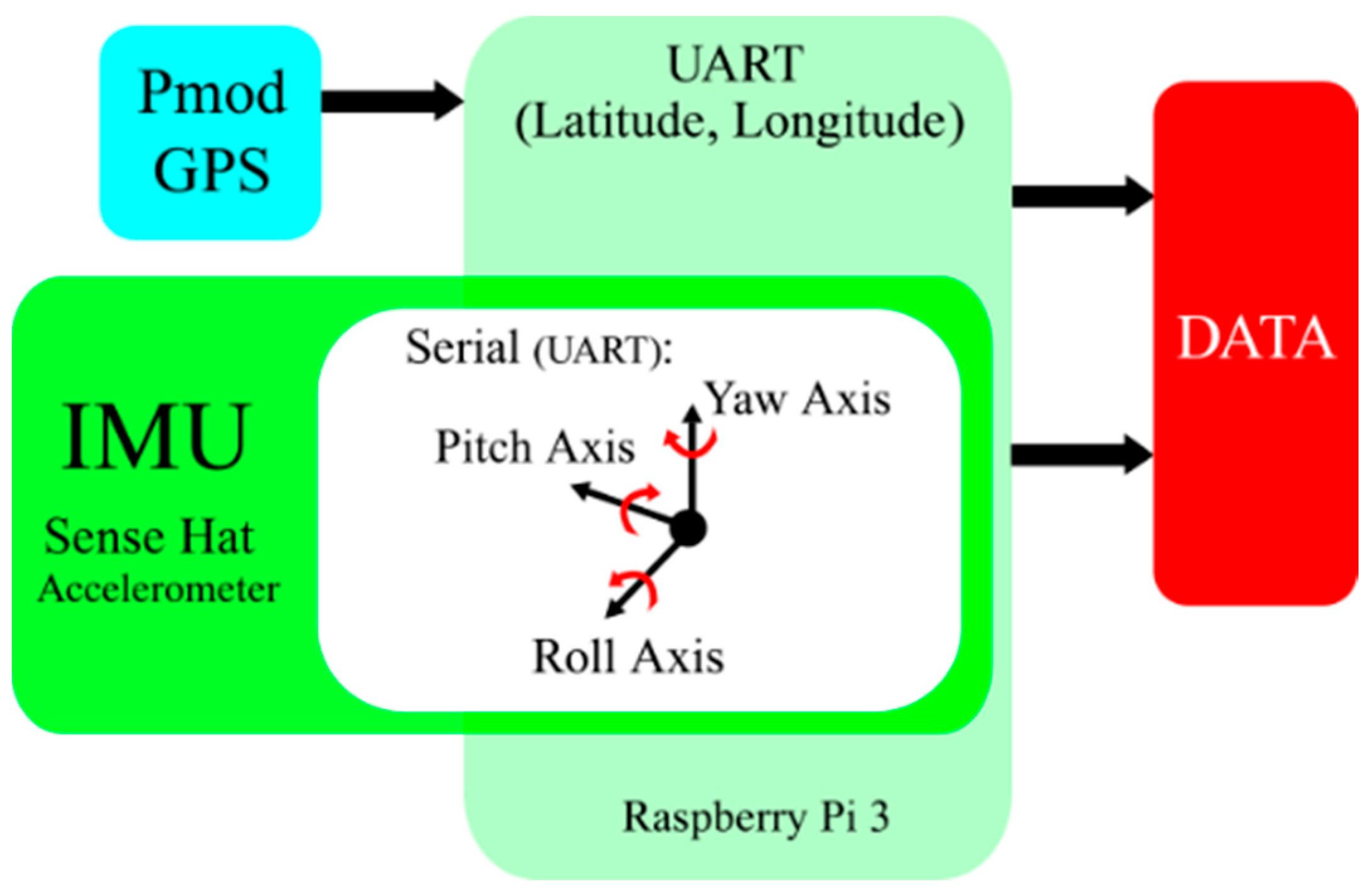
An own data set was collected to take advantage of the data acquisition system (implemented and described in
Section 2.1) since the characteristics of the sensors are known, such as the sampling period and the precision of each one, facilitating the post-processing calculations and the use of the information in different applications. Similarly, as the central limit theorem states, the more data that can be collected on a phenomenon, the more the distribution function that describes it will approximate the normal function and most of the data will be clustered around the mean. As shown in
Table 8, the RMSE of both data sets is similar, being lower for the eigendata. Comparing these values with the information in
Table 6, it can be said that they are around the mean of the latitude and longitude variables.
In
Table 9, a numerical comparison between the accuracy (concerning the Kalman filter response) of the developed algorithm (FPC) and the reported in references [
2,
3,
26] is presented.
As shown in
Table 9, the proposed algorithm has a maximum accuracy, concerning the Kalman Filter, higher than that reported in the papers compared. Although, this accuracy is reduced depending on the route being evaluated (as mentioned above).
5. Conclusions
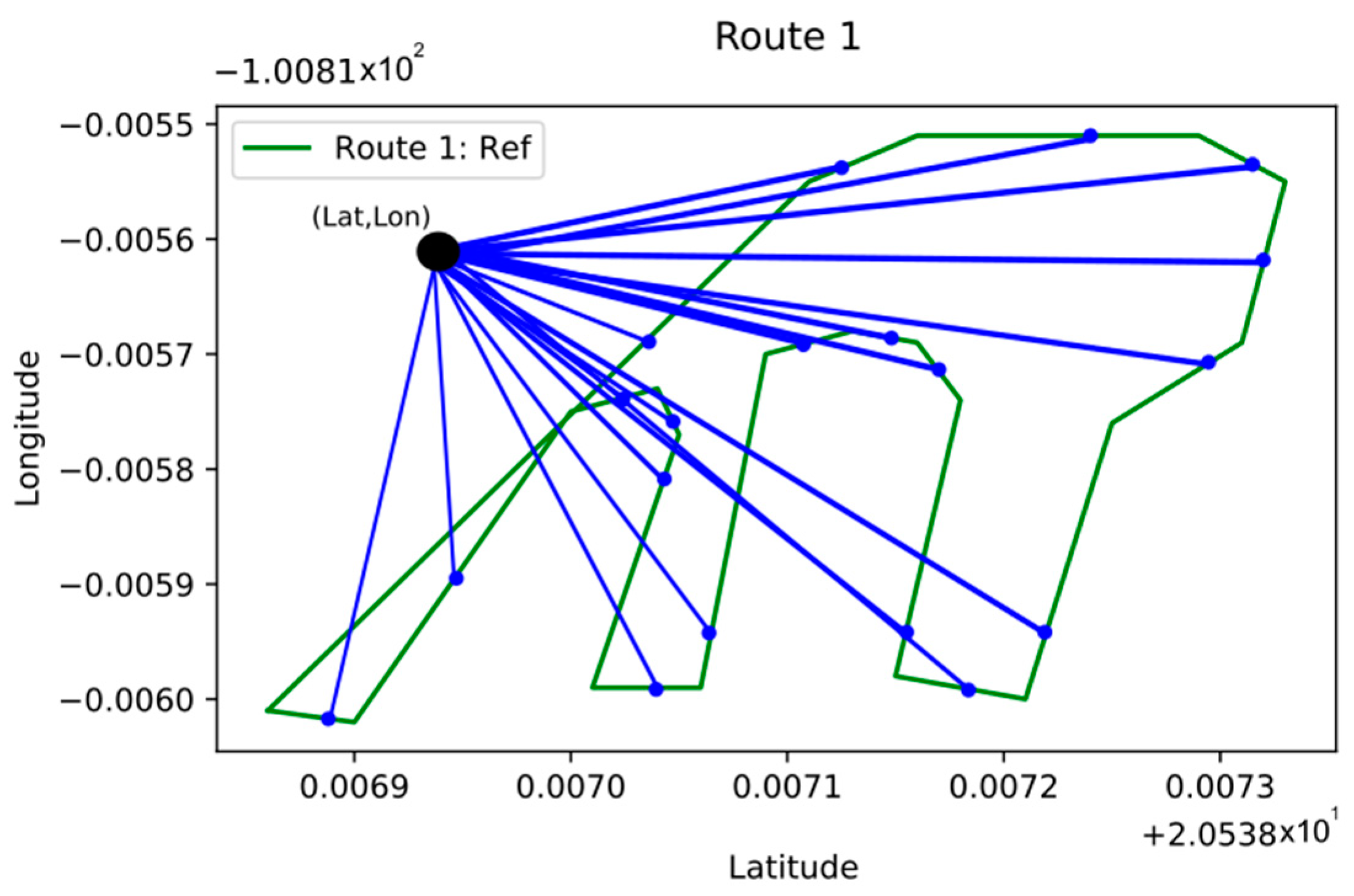
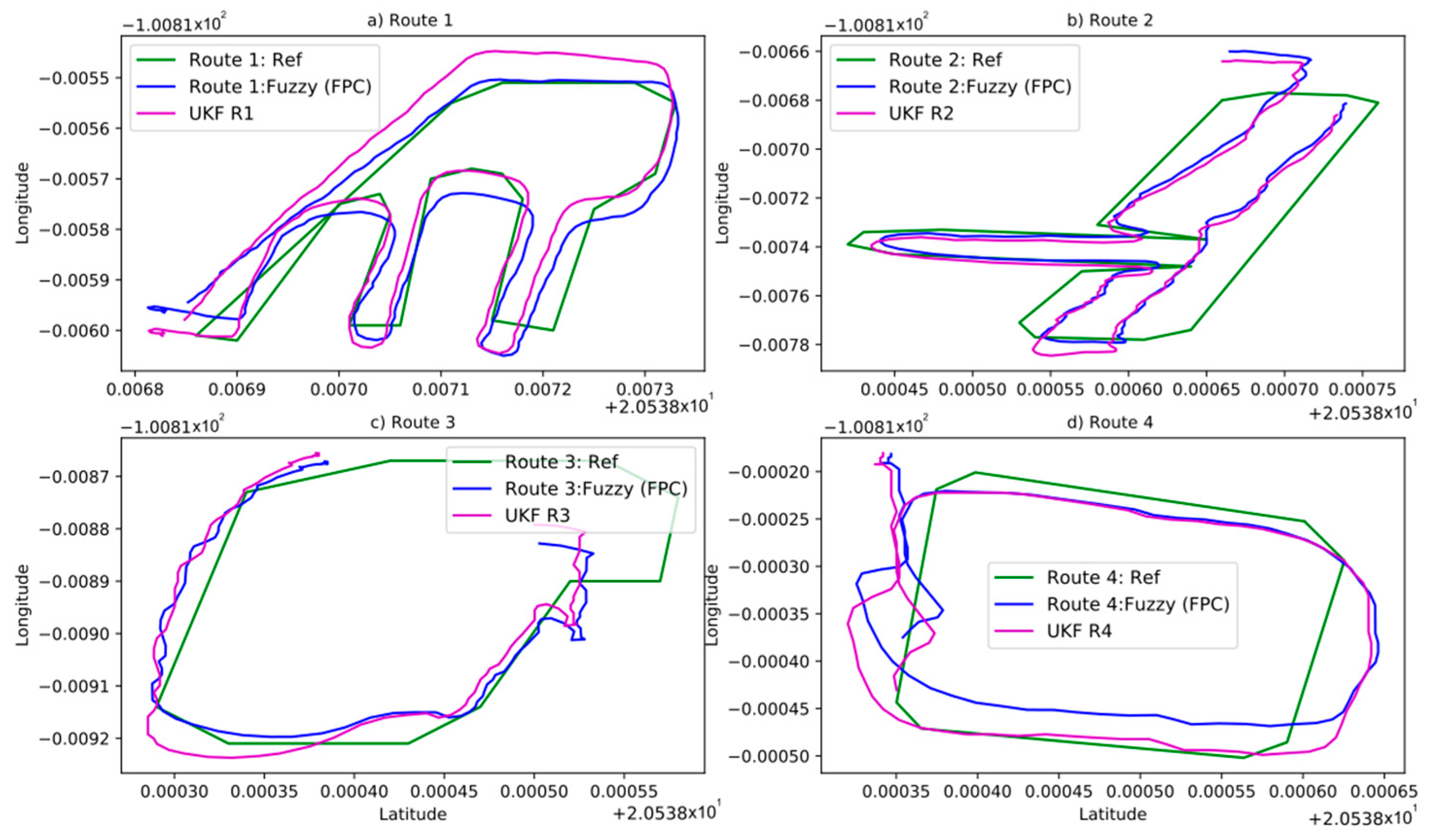
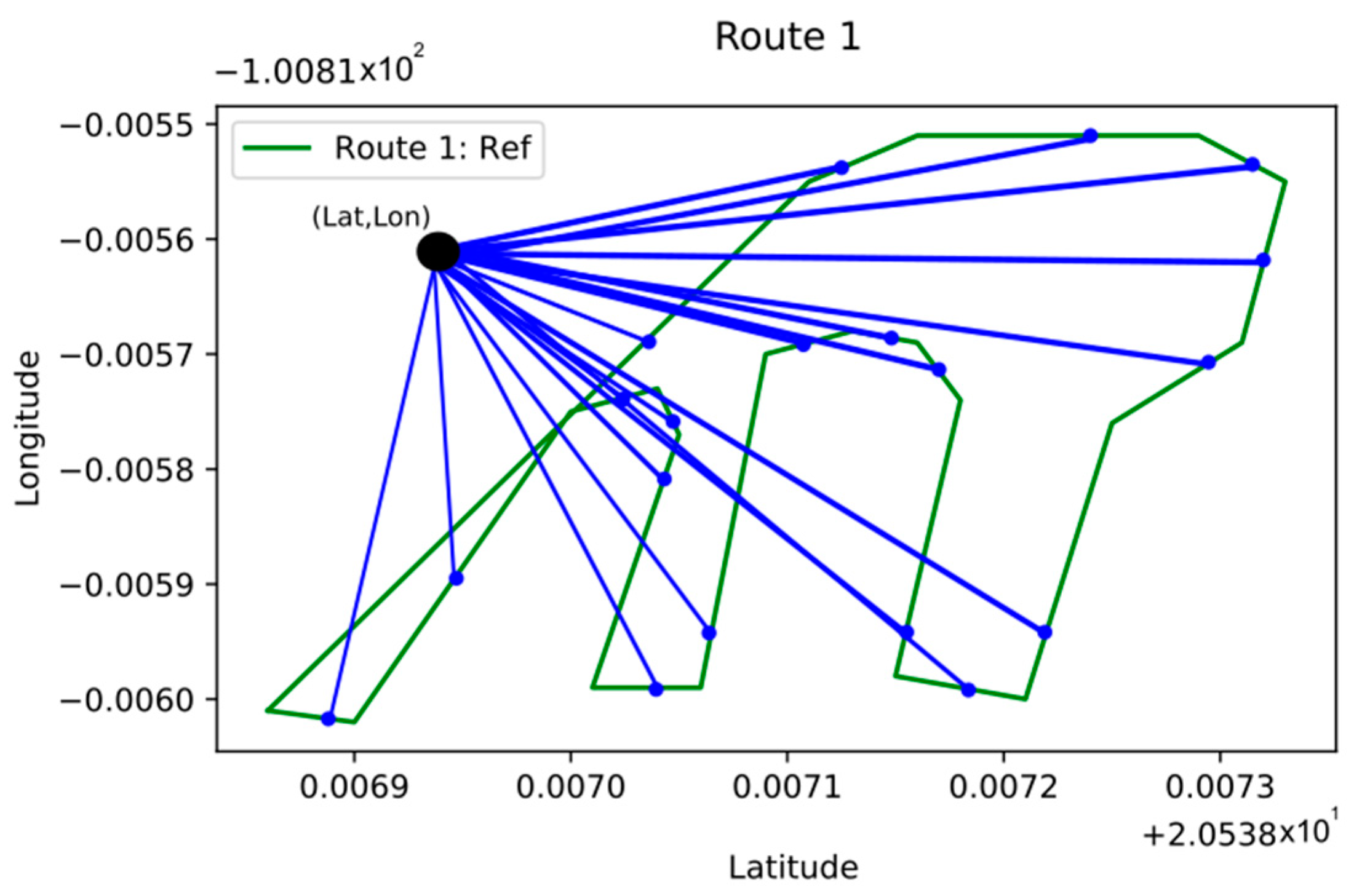
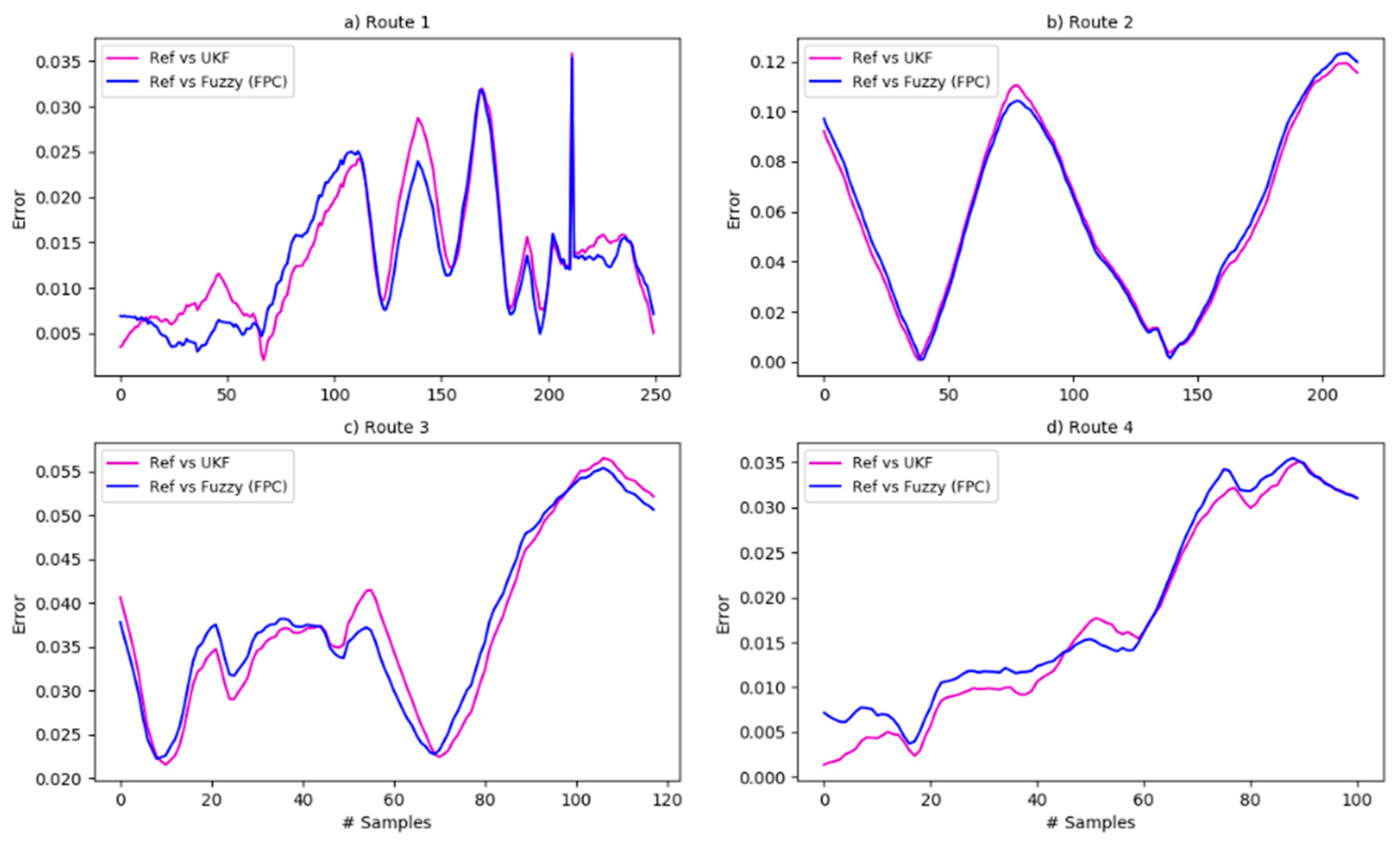
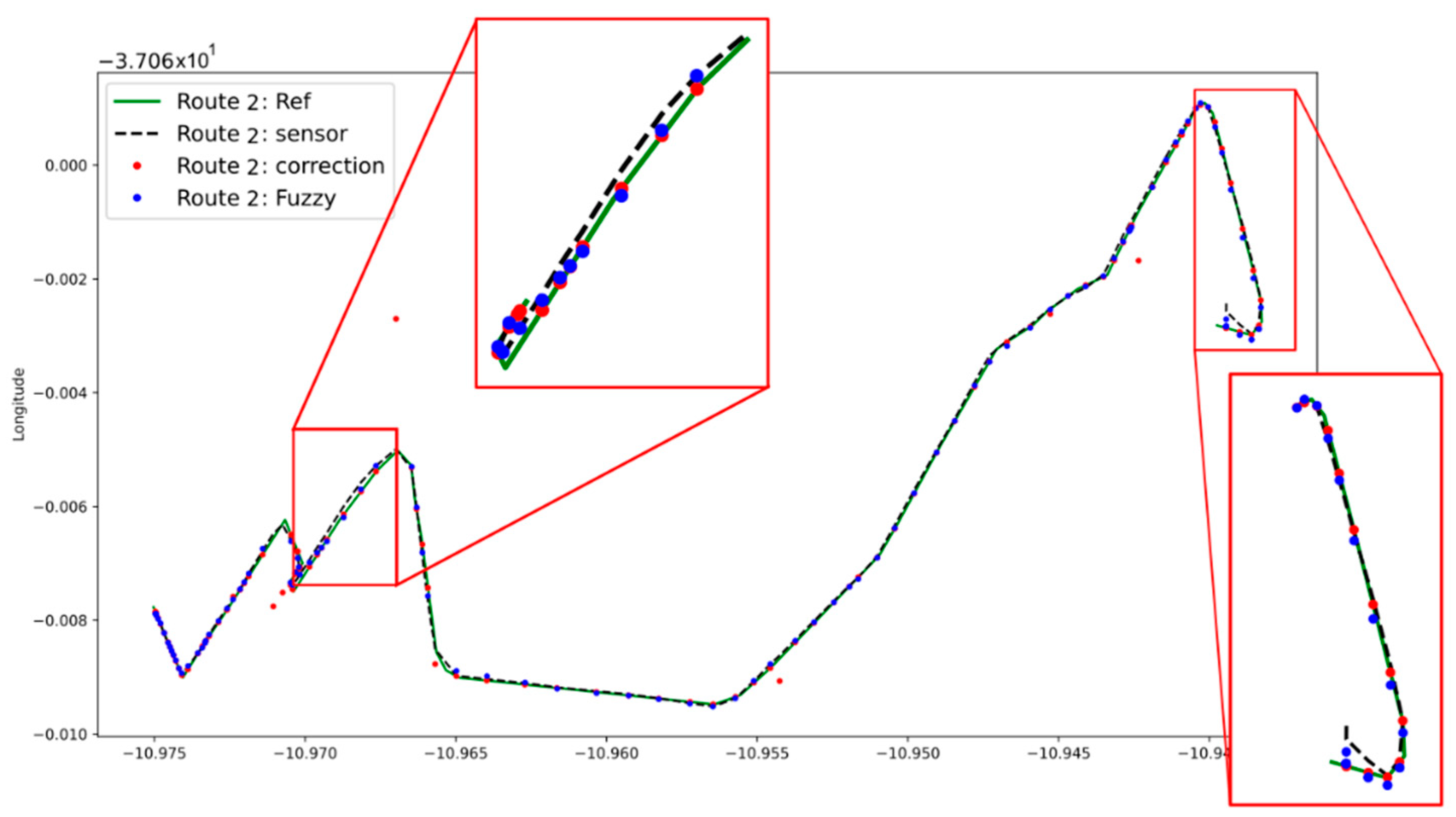
The proposed FPC fuzzy system delivers competitive GPS data correction with the UKF response which is less dependent on tuning parameters, making it as easy (in terms of processing cost) to use and implement on mobile platforms. The proposed fuzzy system (FPC) emulates the way in which a human being describes the shape of a route through lines, so the calculation of these lines is used to approximate the sensor data to the reference.
The response of the fuzzy systems developed in this article improves the accuracy by up to 69.2% to determine the absolute position of a ground vehicle with respect to the classical techniques in this subject such as the UKF. Being highly competitive with techniques developed in the works presented in [
2,
3,
26] (see
Table 9). In addition, our method is less dependent on parameters and sensors, since it only uses GPS data and the reference for design.
Despite improving the response of the UKF, the proposed fuzzy system is limited to the region of the GPS map for which it was trained; that is, if the inputs are extremely different from the data the system was trained in, the FPC prediction will have a large errors. To solve this, it is necessary to collect a greater amount of data covering a wider region of the map to retrain the FPC system and expand its scope. Despite this, something similar happens with the UKF because the covariances R and Q must be re-tuned when the data changes dramatically.
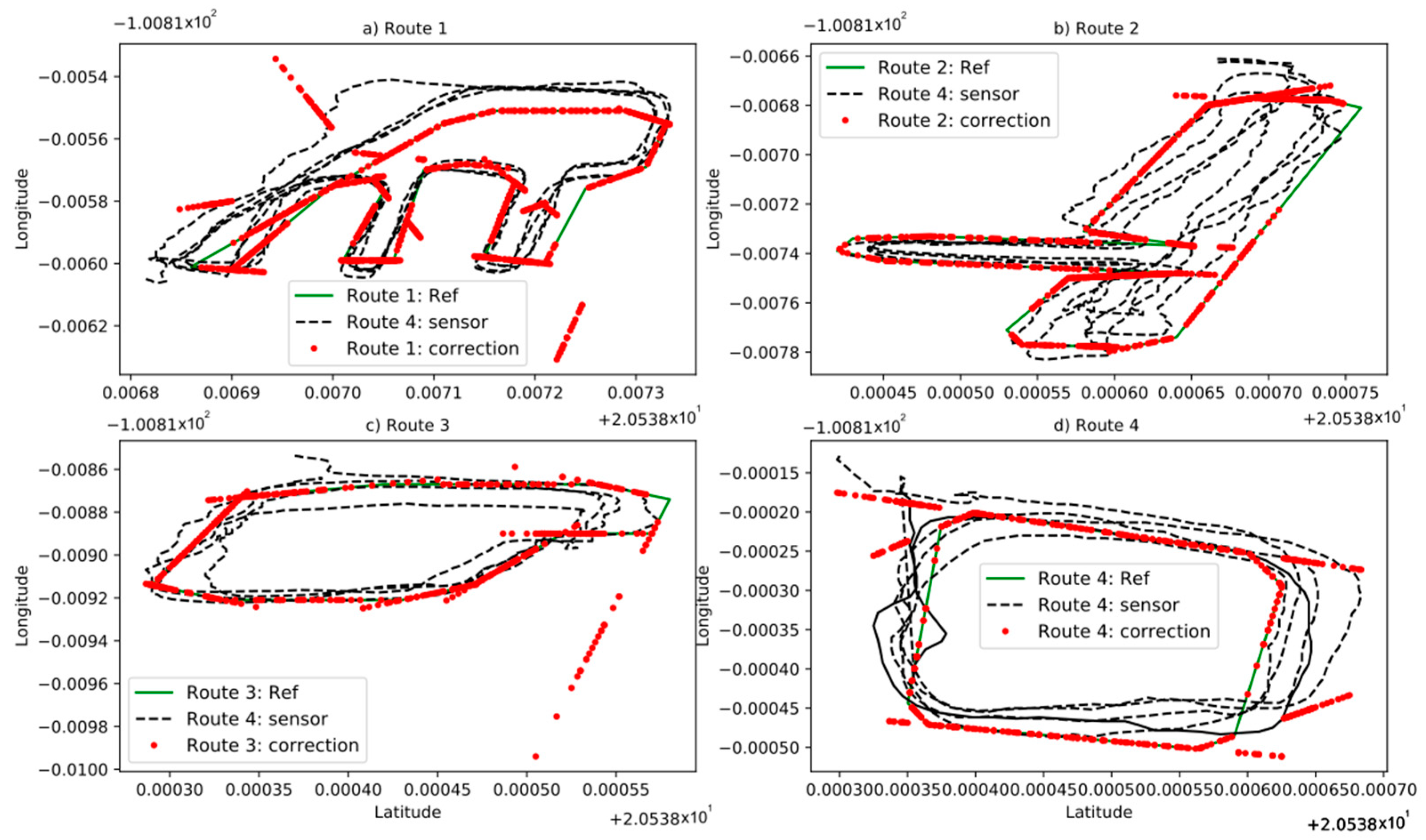
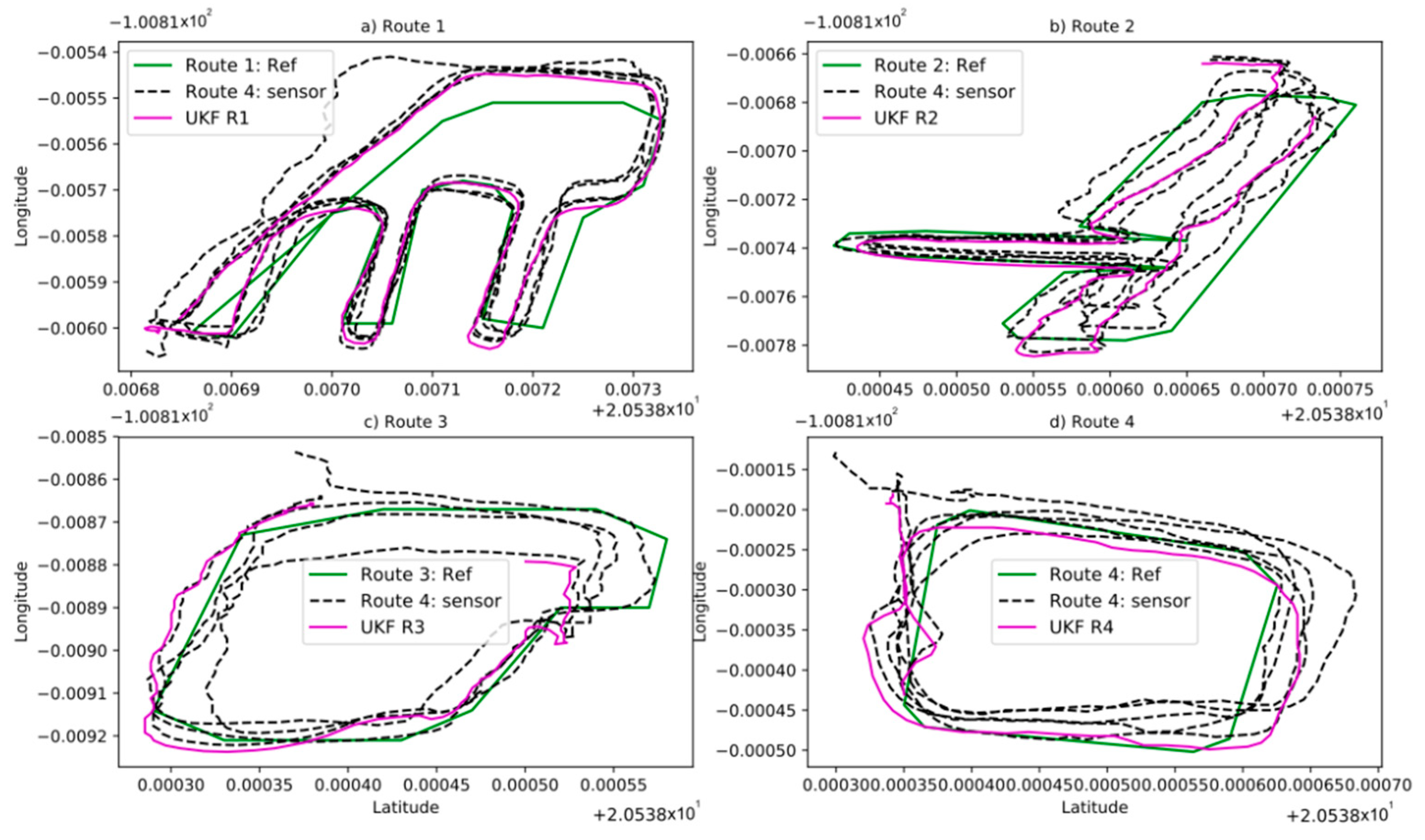
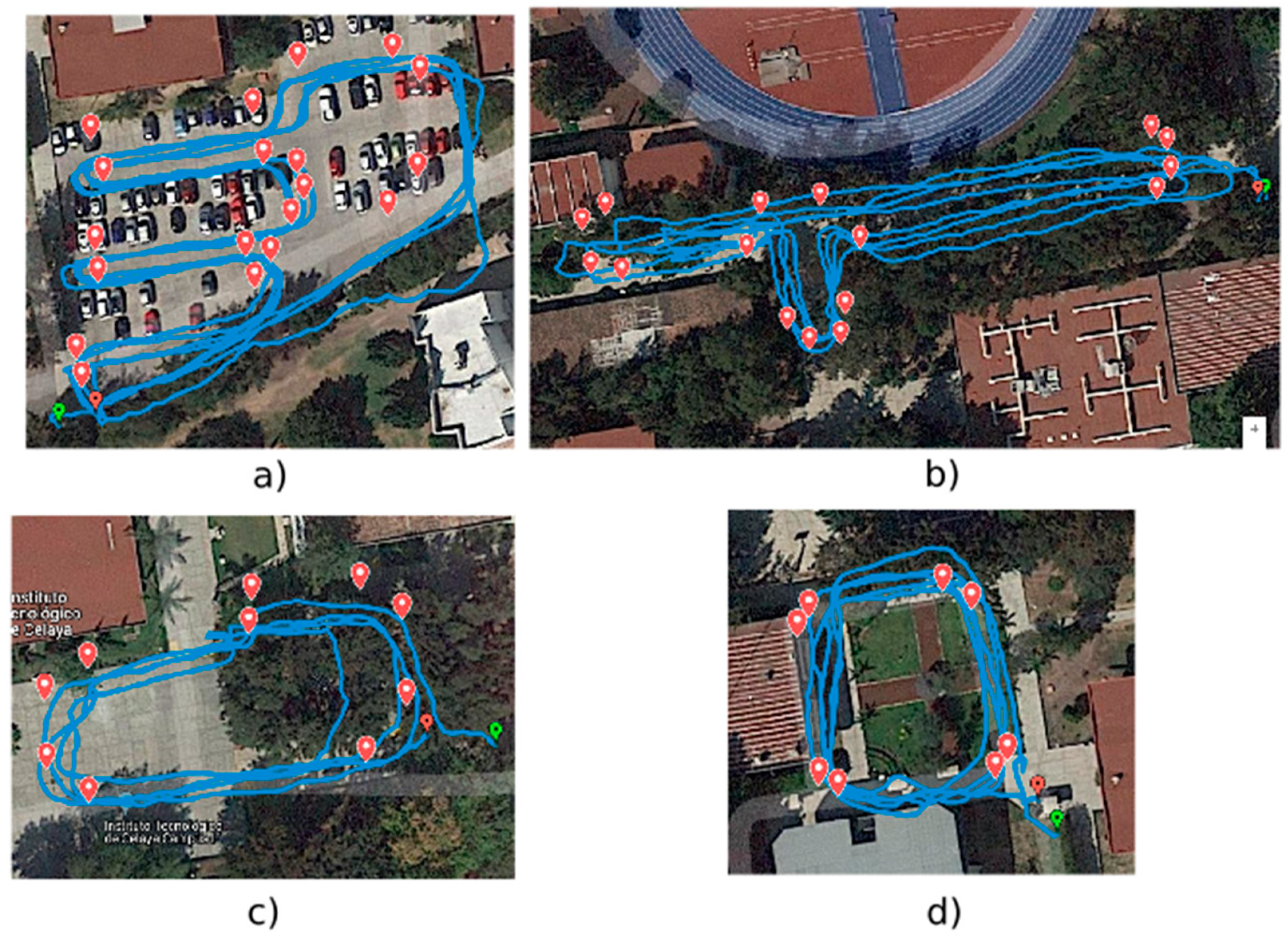
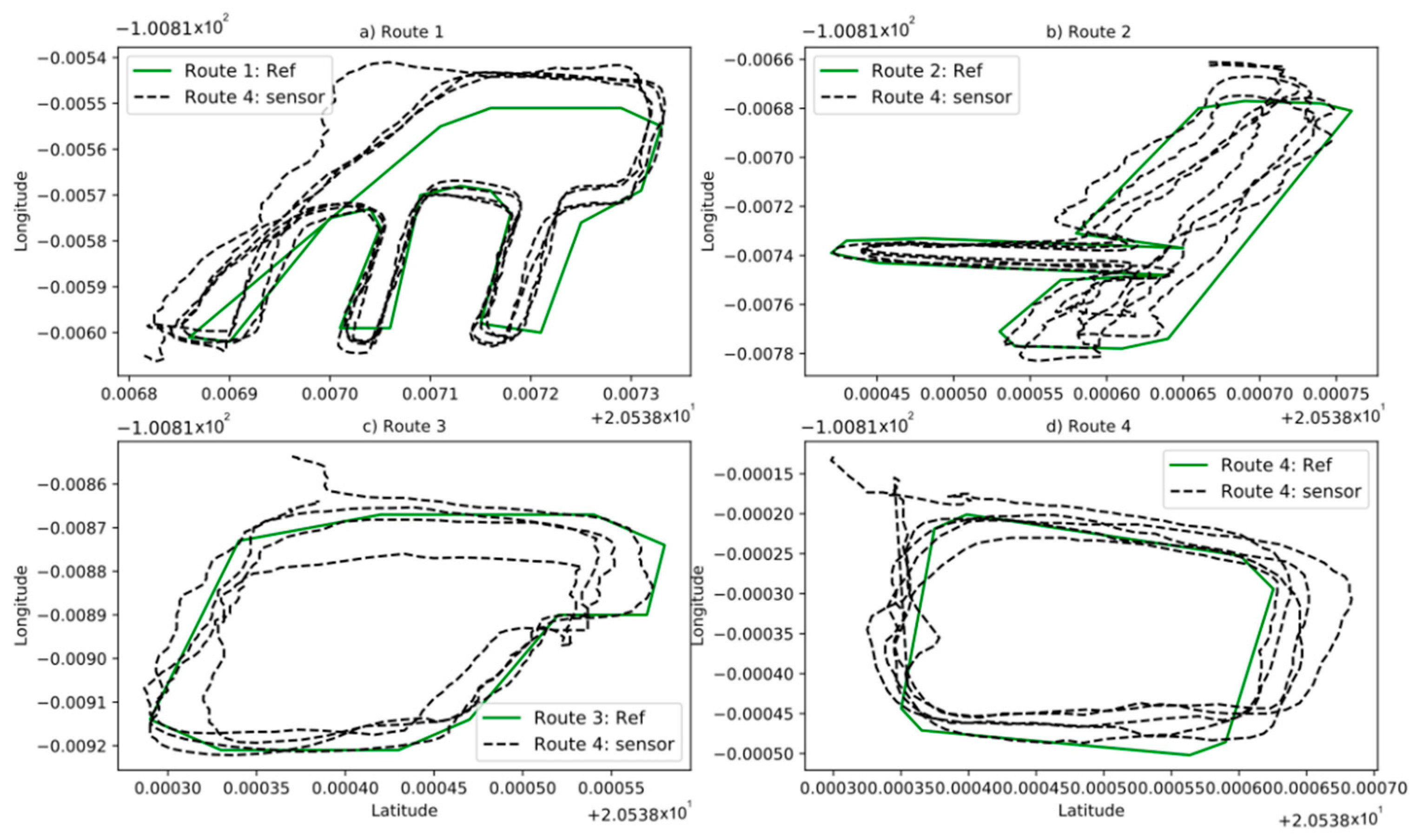
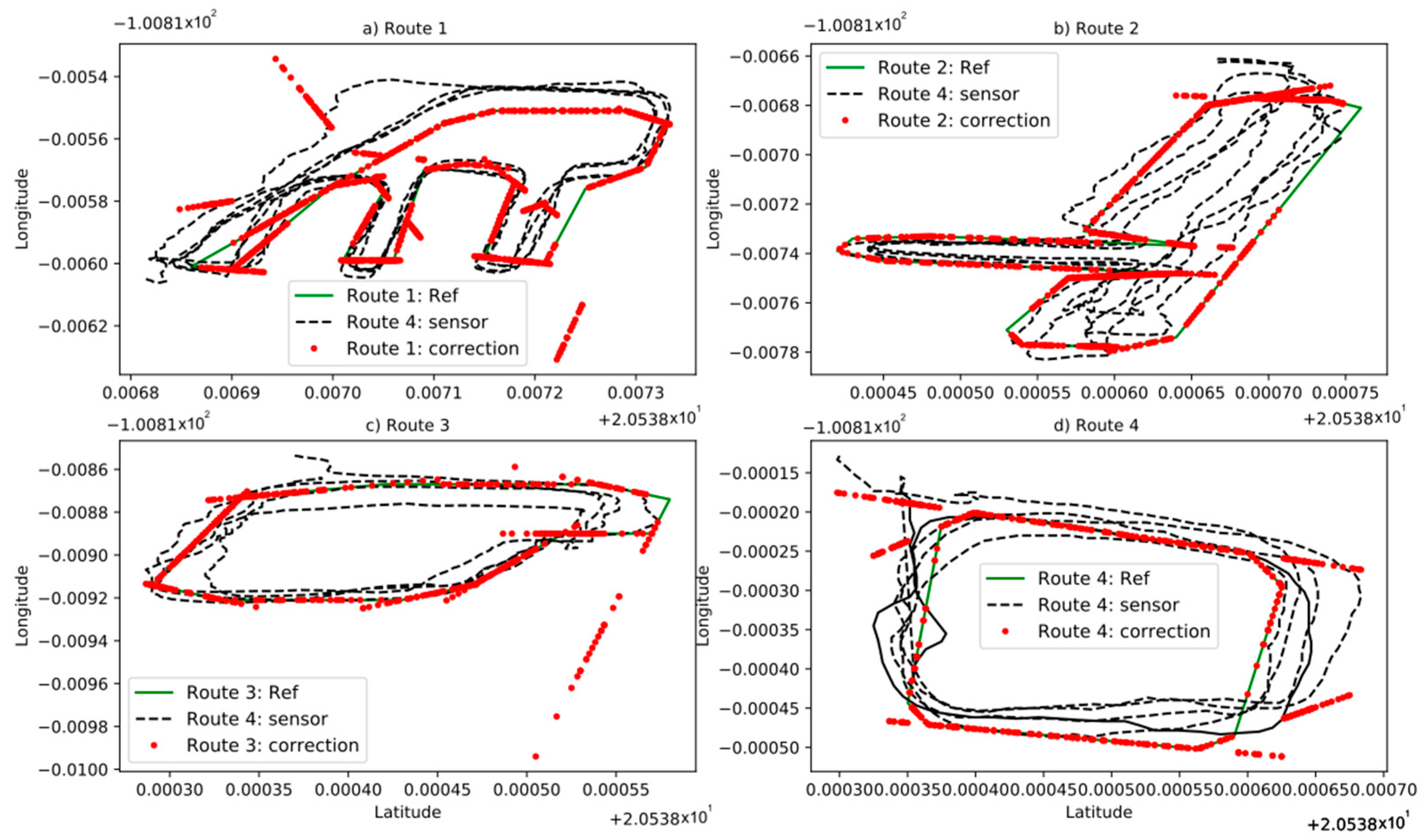
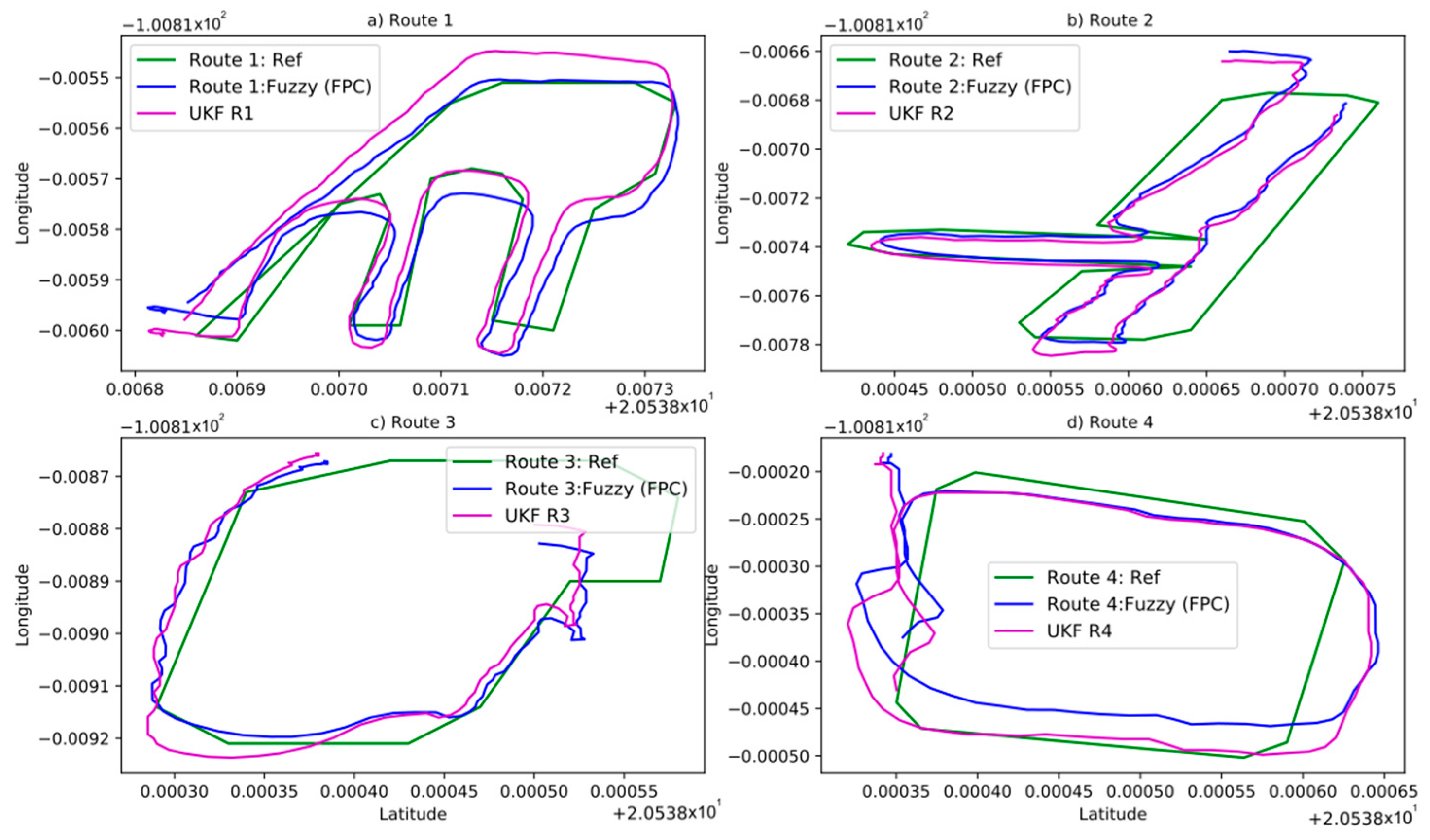
The proposed fuzzy systems were tested on a public dataset [
28,
29], having a favorable performance under poorly controlled conditions both in the way of acquiring the data and in the geographical area where they were collected. As shown in
Figure 14,
Figure 15, and
Table 7.
One of the points of improvement (in future work) for the proposed fuzzy systems is to achieve generalization of their response. This issue can be approached from two different points of view. The first one can be the collection and processing of the largest number of routes travelled with the GPS sensor to make a more complete training of the systems; the second one is to implement fuzzy systems whose training is online, that is, that the fuzzy systems are trained as the data from the GPS sensor arrives when a route is travelled.


 ,
, 









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}