1. Introduction
Matrix equations are often used in the study of ladder networks, control theory, stochastic filtering, dynamic programming, statistics, and other fields, according to Anderson [
1]. Consider the linear matrix equation below [
2].
where
are arbitrary matrices of order
for each
is adjoint of
and
Q is a positive definite matrix of order
. Next, consider the following nonlinear matrix equation:
where
F is continuous mapping in the set of all positive definite matrices to itself, under certain assumptions on
F (order-preserving or order reversing).
Ran and Reurings [
2] obtained positive definite solutions of matrix Equations (
1) and (
2) using the aid of the Banach contraction principle in partially ordered sets. Nieto and Rodríguez-López [
3] also used partially ordered spaces and fixed point theorems to find solutions of some differential equations [
4]. The advantage of this strategy is that the mapping requirements only need to be satisfied for comparable elements, and the relevance of this viewpoint is to govern the essence of the solutions, whether they are negative or positive, which leads to a variety of interesting applications. For more details on the applications of fixed point theory in partially ordered spaces, one may refer to [
5,
6,
7,
8] and references therein.
Berinde [
9], on the other hand, recently developed a new form of contraction mappings called as
-enriched contraction mappings, which generalize contraction and nonexpansive mappings.
The purpose of this work is to investigate the existence and convergence of solutions of matrix equations. To accomplish this, we use the idea of monotone enriched contraction mapping in partially ordered Banach spaces. More specifically, we extend the concept of
-enriched contraction mapping in the setting of partially ordered Banach spaces and establish some existence and convergence results. Thereafter, we use these findings to solve the matrix Equations (
1) and (
2). To approximate the solutions of these matrix equations, we use the Krasnosel’skiĭ iterative technique. Some useful examples discussed herein illustrate our results.
2. Preliminaries
Let
be a Banach space and ⪯ is a partial order on
. We say that
are comparable whenever
or
Let partial order ⪯ be compatible with the linear structure of
, that is, for every
and
, we have
This implies that all order intervals and are convex. Further, we suppose that each and is closed.
A sequence
is monotone increasing if
for all
We shall utilize the observation considered in [
5] (Lemma 3.1). Assume that
is a monotone sequence that has a cluster point, that is, there is a subsequence
that converges to
g. Since the order intervals are closed, it follows
for each
n, that is,
g is an upper bound for
If
is another upper bound for
, then
for each
n, and hence
It implies that
converges to
If
is a monotone increasing (resp. monotone decreasing) sequence that converges to
p, then
(resp.
).
Definition 1 ([
10] (p. 27)).
A mapping is said to be nonexpansive if for all Definition 2 ([
11]).
A mapping is said to be quasi-nonexpansive if for all and where is the set of all fixed points of It is well-known that a nonexpansive mapping with a fixed point is quasi-nonexpansive. However, the converse need not be true.
Let
be a Banach space and
a mapping. The following iterative method is known as the Krasnosel’skiĭ method (see [
12]):
where
Lemma 1 ([
13]).
Let be a Banach space and a mapping, define as follows:for all and Then 3. Main Results
Berinde [
9] recently introduced a new type of contraction mapping, which is described below:
Definition 3. Letbe a Banach space. A mappingis said to be-enriched contraction mapping if there existandsuch that for all Remark 1. - •
It is shown in [
9]
that every contraction mapping ξ is a -enriched mapping. - •
The class of nonexpansive mappings and the class of-enriched contraction mappings are independent in nature.
Example 1 ([
9]).
Let and
be a mapping defined as Then . It is nonexpansive mapping and ξ is a -enriched contraction mapping for any Example 2 ([
13]).
Let and be a mapping defined as Then . It can be seen that ξ is a -enriched contraction mapping. Indeed, for all Thus, for all On the other hand,and, we have Thus, ξ is not a nonexpansive mapping (or not even quasi-nonexpansive).
Example 3. Let be the Banach space equipped with the usual norm and
be a mapping defined by
for all
Then
and ξ is an isometry (or nonexpansive) mapping. On the other hand for all
for all and . Thus, ξ is not a -enriched contraction. Definition 4. Letbe a partially ordered Banach space and a mappingis said to be monotone ifwhere Now, we extend Definition 3 in the setting of partially ordered Banach spaces as follows:
Definition 5. Letbe a partially ordered Banach space. A mappingis said to be monotone-enriched contraction mapping if ξ is monotone and there existandsuch thatfor allwith ϑ and ν are comparable. It can be seen that every monotone contraction mapping with constant is a -monotone enriched contraction mapping.
Example 4. Letbe the Banach space equipped with the usual norm and the order. Letbe a mapping defined byIt can be easily seen that ξ satisfies Definition 5 for all comparable elements, and 1 is a unique fixed point ofOn the other hand, ifand, thenfor any. Hence ξ is not a-enriched contraction mapping. Theorem 1. Letbe a partially ordered Banach space anda monotone-enriched contraction mapping. Suppose that there exists a pointinsuch thatandare comparable. Assume that one of the following holds:
- (i)
ξ is continuous.
- (ii)
For allthe order intervalsandare closed.
Then, ξ admits a fixed point.
Proof. We distinguish the following two cases:
Case 1. If
. By the definition of monotone
-enriched contraction, we have
for all
Take
and put
in (
6), then the above inequality is equivalent to
Define the mapping
S as follows:
Since
is monotone, for all
, we have
so, the mapping
S is also monotone. Then from (
7), we get
for all
, where
Since
,
. Thus from (
9)
S is a monotone contraction mapping. Since
Next, for given
consider the sequence
Since
by the monotonicity of
and successively, we can write
for all
Take
and
in (
9), we have
Successively from (
11), we can obtain
for all
and
It implies that
is a Cauchy sequence and must converge to a point in Banach space
. Take
First, we assume that
is continuous, then from (
10)
and
Therefore,
, and
has a fixed point in
If we assume that (ii) is true, then it can be seen that
Take
and
in (
9), we get
Thus , from Lemma 1, u is a fixed point of .
Case 2. If , then is a monotone contraction mapping and following the similar steps for in place of S, we can complete the proof. □
In the next theorem, we prove the uniqueness of the fixed point and the global convergence of the Krasnosel’skiĭ iterative method.
Theorem 2. If all the hypotheses of Theorem 1 hold. In addition, one of the following holds:
Then ξ has a unique fixed point. Moreover, ifis true then the sequencedefined byconverges to a point infor any initial guess Proof. Let
be another fixed point of
. First, we suppose that hypothesis (X1) is true. We follow the same technique as in [
3]. Let
for given
(given point as in Theorem 1). We consider the following two cases:
Case 1. If
is comparable to
then
is comparable to
for all
, where
S is a mapping defined in (
8). Thus,
which implies that
Case 2. If
is not comparable to
, from (X1) there exists either a lower or an upper bound of
and
, that is, there is a
such that
z is comparable to
and
. Since
S is a monotone,
is comparable to
and
for all
. Now
Thus
Next, we show that
If
p is comparable to
. Since
S is a monotone,
is comparable to
for all
. Then
Therefore,
Again
p is not comparable to
, then from (X1), there exists
such that
z is comparable to
p and
. Since
S is a monotone,
is comparable to
and
for all
. Thus
Hence . If is totally ordered, then following the same technique as in Case 1, we can complete the proof. □
4. Solutions to Linear Matrix Equation
In this section, we discuss the solution of the matrix Equation (
1). We define a mapping
G on
(the set of all Hermitian matrices of order
) as follows:
where
,
(for each
i) and
Q are the same as in (
1). It can be seen that solutions of (
1) are the fixed points of
G. Let
(set of all matrices of order
), then
where
are the singular values of
A for
For given
(the set of all positive definite matrices of order
), the following norm can be defined:
It is can be seen that equipped with the norm is a partially ordered Banach space for any We write (or ) if (or ). We denote by I an identity matrix of order and the spectral norm, that is, where is the largest eigenvalue of
Lemma 2 ([
2])
. Let A and B of order with . Then Theorem 3. Letand for some, we havewhereandThen - (1)
Mapping G admits a unique fixed point in
- (2)
For given, the sequencedefined byconverges to the unique solution of (
1)
, which is in
Proof. It can be seen that for all
, there exist a lower bound or an upper bound. For
so
Now we show that
G satisfies condition (
5). Let
with
then
Thus,
Thus from Lemma 2, we have
From the assumptions on theorem
Therefore, from Theorems 1 and 2, mapping
G has a unique fixed point and the sequence
converges to the solution of (
1). It is evident that
G maps
into the set
; therefore, the solution lies in this set and is positive definite. □
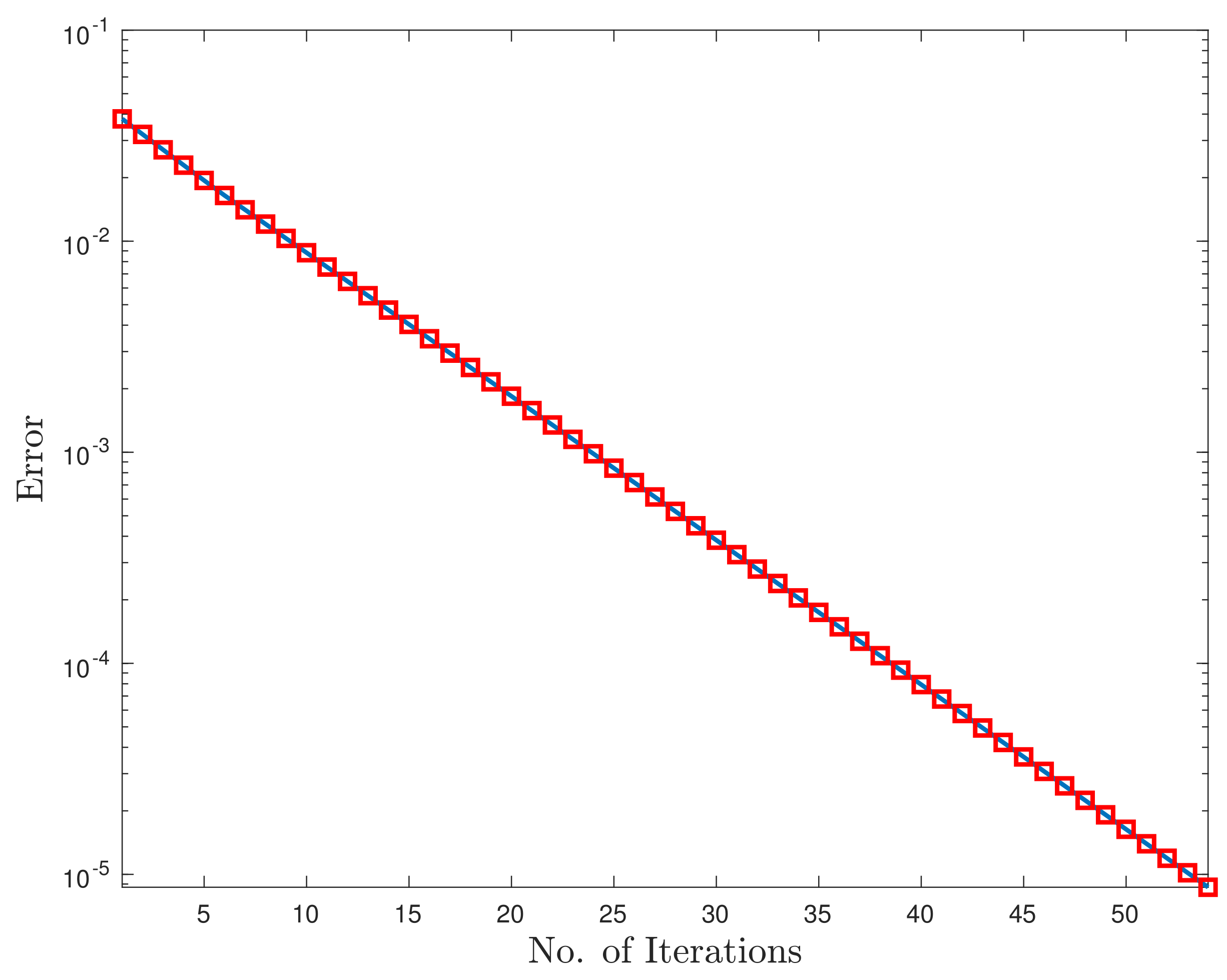
Example 5. Consider the liner matrix Equation (
13)
for ,
i.e.,where The conditions of Theorem 3 can be checked numerically by considering different particular values of matrices involved. For instance, it can be tested (and verified to be true) for To see the behavior of convergence of the sequencedefined in (
14)
, we take-up the initial value: If we consider, then after 10 successive iterations, the approximations of the unique positive definite solution of the (15) is the following It can also be verified that the elements of each sequence are order-preserving. The convergence behavior is shown in Figure 1. 5. Solutions to Nonlinear Matrix Equations
In this section, we consider the following nonlinear matrix equations:
where
is a continuous mapping. For more details of these class of equations, see [
14]. In view of different conditions on mapping
F, we consider the following cases:
Case 1. If
F is order-preserving and considering the following equation:
The mapping
G is well-defined on
and order-preserving. For all
,
. In particular,
. Since
G is order-preserving
Thus, is an increasing sequence.
Proposition 1. Suppose that there exists ansuch that. Then G maps the setinto itself. The sequenceconverges to a pointwhich is the smallest solution of (
17)
. Further, the sequence is a decreasing sequence, which is the largest solution in the set Proof. Let
, then
. If
, from the order-preserving property of
G,
and for all
Thus,
is an increasing sequence and bounded above by
for any
. Further, the sequence
is bounded below the decreasing sequence. Let
and
Suppose
U is any solution of (
17), then
For all
Thus
If
then for all
Hence □
The following theorem ensures the uniqueness of the solution of (
17).
Theorem 4. Assume that for allwith, we havewhere. Then (
17)
has a unique solution which is positive definite. Moreover, for given with the sequence defined asconverges (in sense of norm )
to the solution of (
17).
Proof. Let
with
From the assumptions in the theorem, all the hypotheses of Theorem 2 are fulfilled and we obtain the desired result. □
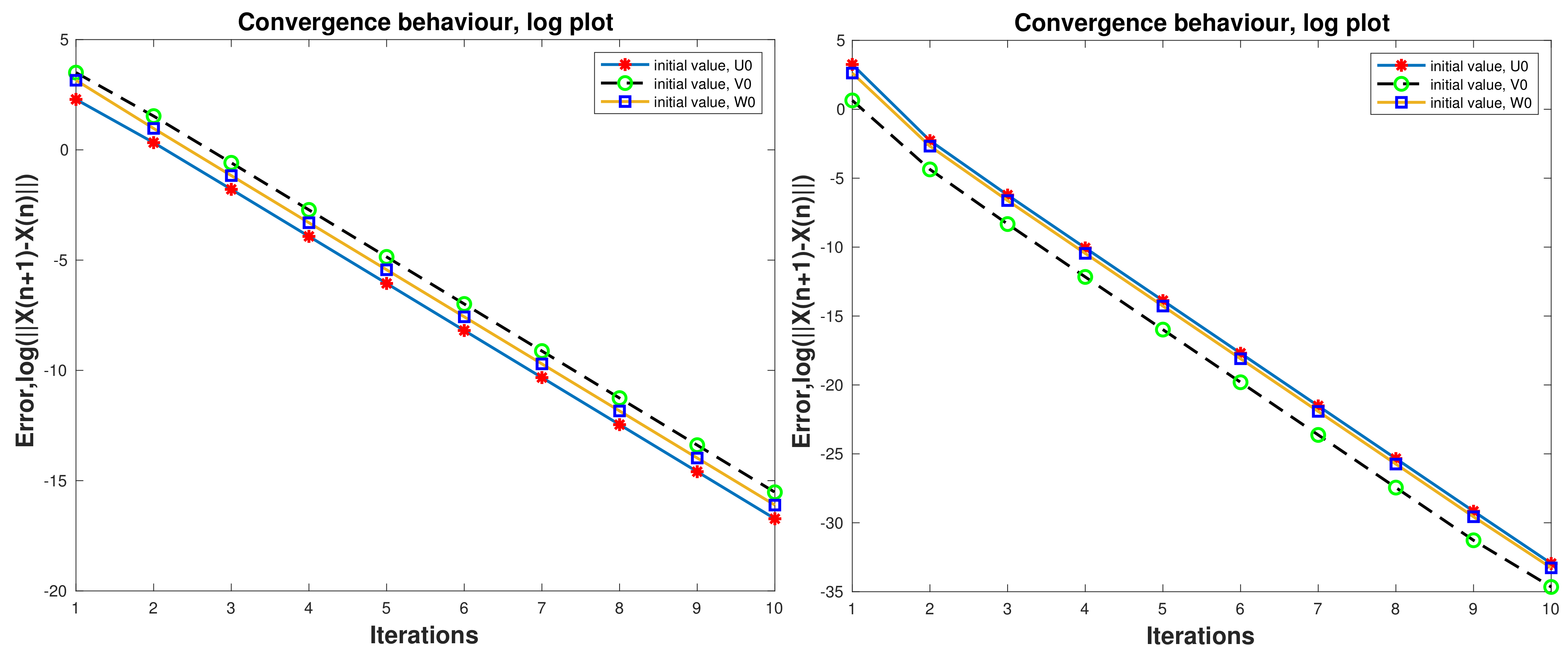
Example 6. Consider the nonlinear matrix Equation (
17)
for ,
,
, i.e.,where The conditions of Theorem 4 can be checked numerically by considering different particular values of matrices involved. For instance, it can be tested (and verified to be true) for To see the behavior of convergence of the sequencedefined in (
18)
, we take-up three initial values considered below: For, then after 10 successive iterations, the approximations of the unique positive definite solution of (
19)
is the following For, then after 10 successive iterations, the approximations of the unique positive definite solution of (
19)
is the following The convergence behavior is shown in Figure 2. Case 2. Consider the following equation
Assume that
F is order-reversing in (
20), then
G is order-preserving. Assume that there exists
such that
. Then
One can easily see that is mapped into itself.
Proposition 2. Suppose that there exists asuch that. Then G maps the setinto itself. The sequenceconverges to a pointwhich is the largest solution of (
20)
. Further, the sequence is an increasing sequence and converges to a point , which is the smallest solution in the set Theorem 5. Letand suppose that there existssuch that. Further, assume that forwe havewhere. Then (
20)
has a unique solution, which is positive definite. Moreover, given with , the sequence is defined asconverges (in the sense of norm )
to the solution of (
20).
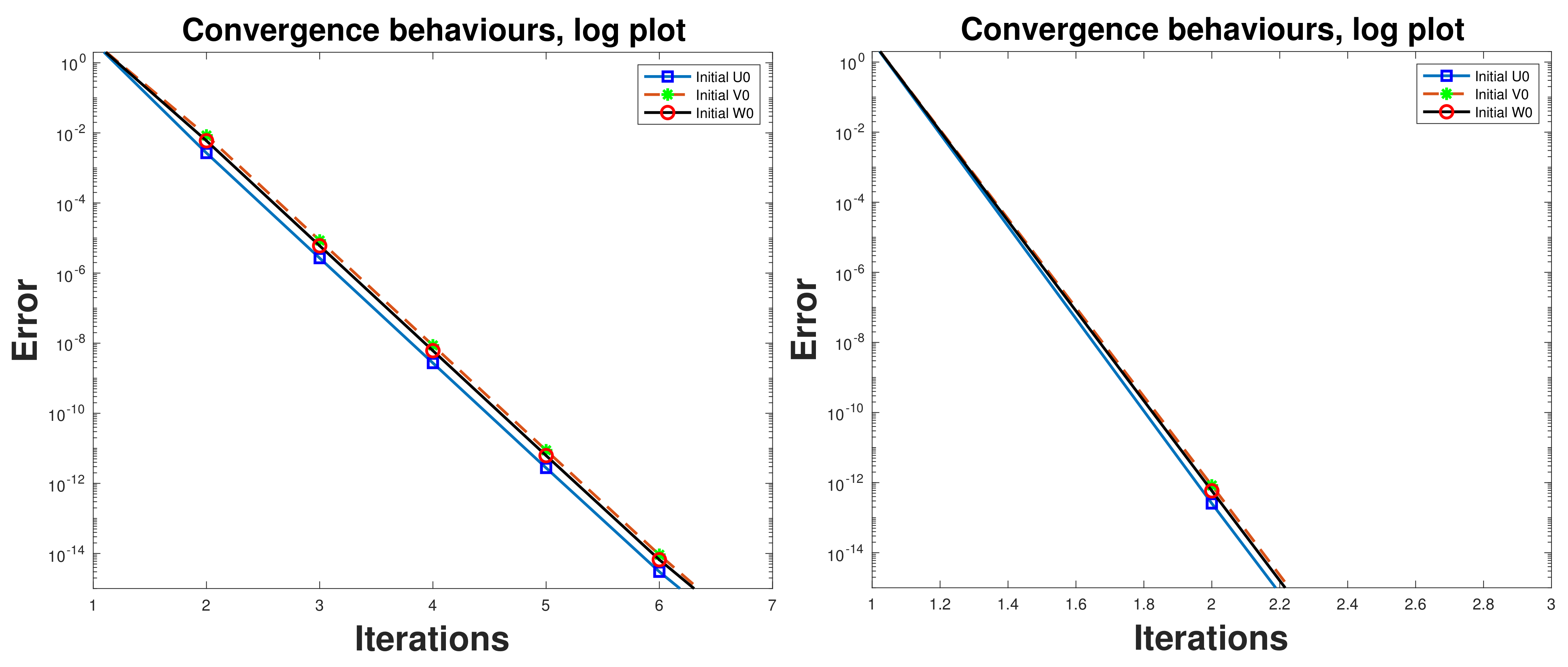
Example 7. Consider the nonlinear matrix Equation (
20)
for ,
,
i.e.,where The conditions of Theorem 5 can be checked numerically by considering different particular values of matrices involved. For instance, it can be tested (and verified to be true) for To see the behavior of convergence of the sequencedefined in (
21)
, we take-up three initial values: For, then after three successive iterations, the approximations of the unique positive definite solution of the (
22)
are the following 6. Conclusions
In this paper, we studied new existence and convergence conditions for solutions of linear and nonlinear matrix equations.
Author Contributions
Supervision, R.P.; Writing-original draft, R.S.; Writing-review & editing, H.K.N. and M.D.l.S. All authors contributed equally to this work. All authors have read and agreed to the published version of the manuscript.
Funding
The authors thank the Basque Government for its support through Grant IT1207-19.
Data Availability Statement
Not applicable.
Acknowledgments
We are very thankful to the reviewers for their constructive comments and suggestions that have been useful for the improvement of this paper. The first author acknowledges the support from the GES 4.0 fellowship, University of Johannesburg, South Africa.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Anderson, W.N., Jr.; Morley, T.D.; Trapp, E.G. Positive solutions to X = A − BX−1B*. Linear Algebra Appl. 1990, 134, 53–62. [Google Scholar] [CrossRef] [Green Version]
- Ran, A.; Reurings, M. A fixed point theorem in partially ordered sets and some applications to matrix equations. Proc. Am. Math. Soc. 2004, 132, 1435–1443. [Google Scholar] [CrossRef]
- Nieto, J.J.; Rodríguez-López, R. Contractive mapping theorems in partially ordered sets and applications to ordinary differential equations. Order 2005, 22, 223–239. [Google Scholar] [CrossRef]
- Carl, S.; Heikkilä, S. Fixed Point Theory in Ordered Sets and Applications: From Differential and Integral Equations to Game Theory; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2010. [Google Scholar]
- Dehaish, B.A.B.; Khamsi, M.A. Mann iteration process for monotone nonexpansive mappings. Fixed Point Theory Appl. 2015, 2015, 177. [Google Scholar] [CrossRef] [Green Version]
- Shukla, R.; Pant, R.; Kadelburg, Z.; Nashine, H.K. Existence and convergence results for monotone nonexpansive type mappings in partially ordered hyperbolic metric spaces. Bull. Iran. Math. Soc. 2017, 43, 2547–2565. [Google Scholar]
- Shukla, R.; Pant, R.; Kumam, P. On the α-nonexpansive mapping in partially ordered hyperbolic metric spaces. J. Math. Anal. 2017, 8, 1–15. [Google Scholar]
- Shukla, R.; Wiśnicki, A. Iterative methods for monotone nonexpansive mappings in uniformly convex spaces. Adv. Nonlinear Anal. 2021, 10, 1061–1070. [Google Scholar] [CrossRef]
- Berinde, V.; Păcurar, M. Approximating fixed points of enriched contractions in Banach spaces. J. Fixed Point Theory Appl. 2020, 22, 38. [Google Scholar] [CrossRef] [Green Version]
- Goebel, K.; Kirk, W. Topics in metric fixed point theory. In Cambridge Studies in Advanced Mathematics; Cambridge University Press: Cambridge, UK, 1990; Volume 28. [Google Scholar]
- Diaz, J.B.; Metcalf, F.T. On the set of subsequential limit points of successive approximations. Trans. Am. Math. Soc. 1969, 135, 459–485. [Google Scholar]
- Krasnosel’skiĭ, M.A. Two remarks on the method of successive approximations. Uspekhi Mat. Nauk 1955, 10, 123–127. [Google Scholar]
- Berinde, V. Approximating fixed points of enriched nonexpansive mappings by Krasnoselskij iteration in Hilbert spaces. Carpathian J. Math. 2019, 35, 293–304. [Google Scholar] [CrossRef]
- El-Sayed, S.M.; Ran, A.C.M. On an iteration method for solving a class of nonlinear matrix equations. SIAM J. Matrix Anal. Appl. 2001, 23, 632–645. [Google Scholar] [CrossRef]
| Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).




{kind=link}
{kind=link}
{kind=link}
{kind=link}