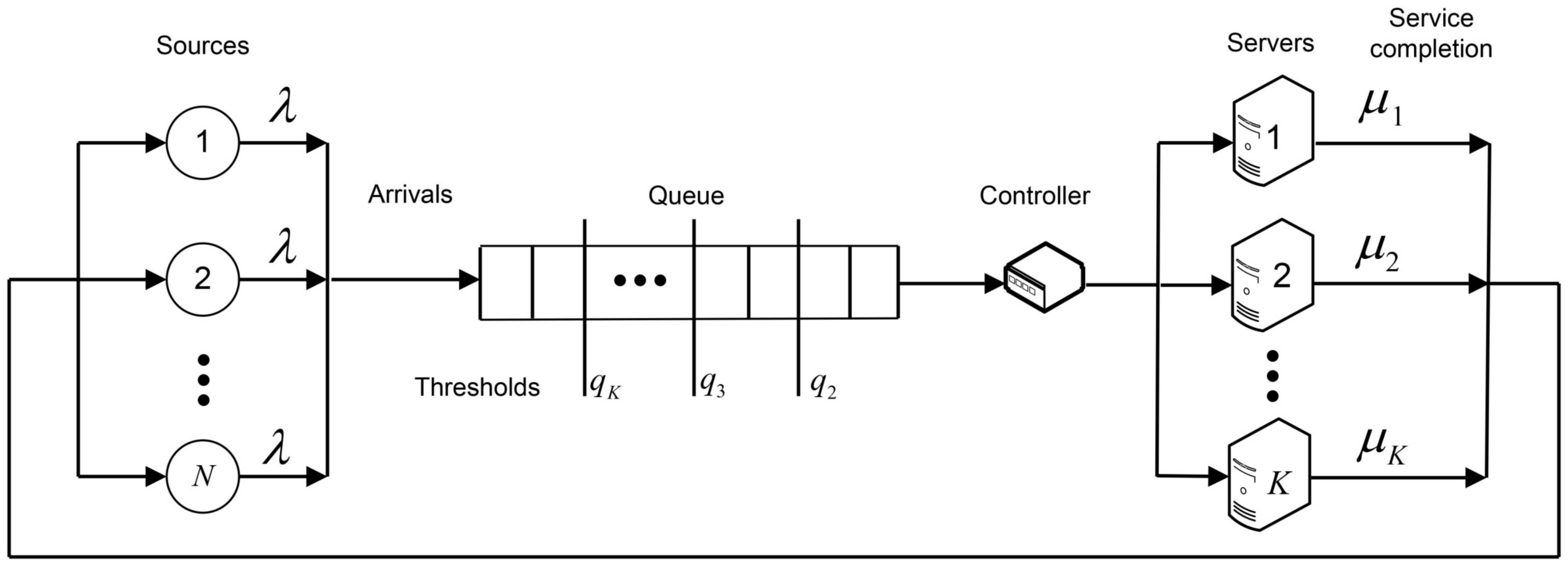
Here we discuss the main model of the non-preemptive finite-source controlled queueing system of the type
illustrated in
Figure 1. The system has
K heterogeneous servers with different rates
and
N customers in a source. It operates under the optimal allocation policy which minimizes the mean number of customers in the system. It will be shown that this policy is defined through a sequence of threshold levels
for the queue lengths which prescribe the activation of slower servers. The analysed system can be treated as a model for the machine-repairman problem, where
N unreliable machines in a working area with exponential distributed life times and equal rates
must be repaired by
K heterogeneous repair stations. The machines fail independently of each other. The stream of failed machines can be treated as an arrival stream of customers to the queueing system. Hereafter, we will refer to the customer as a failed machine which enters the repair system and gets there a repair service. After the repair the machine becomes as good as a new one and it returns to the working area. The aim is to dynamically allocate the customers to the servers in order to minimize the long-run average number of customers in the system and to calculate the corresponding mean performance measures.
2.1. MDP Formulation
We formulate the optimal allocation problem in this machine-repairman system as a Markov Decision Process (MDP) in the following way. The behaviour of the system is described by a multi-dimensional continuous-time Markov-chain
where
stands for the number of customers waiting in the queue at time
t and
specifies the state of the
jth server at time
t, where
State space: The set
consists of
dimensional row vectors,
where
denotes the number of customers in the queue and
– the status of the
jth server in state
x. The total number of states in the set
is equal to
.
Decision epochs: The arrival and service completion epochs in the system with waiting customers.
Action space:. To identify the group of idle and busy servers, the following sets are defined,
With this notations the set of admissible control actions in state can be defined as . The action means that in state x a customer must be allocated to an idle server, while means that the customer must be routed to the queue. At an arrival epoch, which occurs only if the number of customers in the system is less than N, the arrived customer joins the queue and simultaneously another one from the head of the queue must be routed to some idle server or returned back to the queue. At a service completion epoch the same happens, i.e. the customer from the head of the queue is routed either to one of idle servers or to the queue again. By service completion in a system without waiting customers no actions have to be performed.
Immediate cost: The function
specifies the number of customers in a state
, i.e.,
which is in fact independent of a control action
a.
Transition rates: The policy-dependent infinitesimal matrix
of the Markov-chain (
1) includes the rates to go from state
x to state
y given the control action is
a defined as
with
, where
and
stand for the shift operators applied to the vector state
x in the following way,
Due to the finiteness of the state space
and boundedness of the immediate cost function
, a stationary average-cost optimal policy
exists with a finite constant mean value for the number of customers in the system
which is independent of the initial state
x. In this case the policy-iteration algorithm introduced in Algorithm 1 converges.
This algorithm consists of two main parts: Policy evaluation and Policy improvement. In the first part, a system of linear equations with immediate costs
is solved for the unknown real-valued dynamic-programming value function
and mean value
given a control policy is
f. The second part of the algorithm is responsible for improving the previous policy, which for a given system consists in determining, for each system state, a control action
a that minimizes the value function
. The improved control action in state
x is defined then as
for
. Thus, the algorithm constructs a sequence of improved control policies until it finds one that minimizes the gain
.
In Algorithm 1 we perform a conversion of the
-dimensional state space
of the Markov chain (
1) to one-dimensional equivalent state space using the function
, where
In one-dimensional state space the transitions due to arrivals and service completions can be defined then as
For more details about derivation of the optimality equation for heterogeneous queueing systems the interested reader is referred to relevant publications, e.g., [
3].
| Algorithm 1 Policy-iteration algorithm |
- 1:
procedurePIA() - 2:
▹ Initial policy - 3:
- 4:
▹ Policy evaluation - 5:
for do - 6:
end for - 7:
- 8:
if then return - 9:
else , go to step 4 - 10:
end if - 11:
- 12:
end procedure
|
Numerical analysis confirms our expectation that the optimal control policy in heterogeneous systems for a finite number of customers also belongs to a class of threshold policies, as in infinite population case. Theoretical justification of this statement is still difficult. For this purpose it is necessary to prove that the dynamic-programming operator
B defined for our queueing model as
where
and
are the events operators in case of a new arrival and a service completion at server
,
preserves the monotonicity properties of the increments of the value function
v:
In proving the inequality (
7) we encounter difficulty. This is due primarily to the form of the operator
B in (
5). There is a term describing arriving customers whose coefficient
depends on the system state
x. Bringing the terms in inequality (7) to a common denominator by introducing fictitious transitions, we get terms which cannot be proved to be negative. We hope that we will be able to overcome these difficulties in our next paper, but to date we’re basing our statement about a threshold structure of the optimal control policy
f exclusively on the performed numerical experiments. The following example makes the case vividly.
Example 1. Consider the system with , and . The service rates take the following values: . The Table 1 of optimal control actions for selected system states x is of the form: Threshold levels , , are evaluated by comparing the optimal actions and for , , . In this example the optimal policy f is defined here through a sequence of threshold levels and .
2.2. Evaluation of System Performance Measures
We are concerned in calculation of the system performance measures for a given policy f. The state probabilities and performance characteristics defined here will refer to some particular fixed control policy f, so we will use in notations the corresponding upper index. The states x of the set with are ordered according to the number of busy servers while the states for are ordered with respect to the queue length, so that the infinitesimal matrix has a block three-diagonal structure for the fixed policy f. First we define the performance characteristics:
The probability that the kth server is busy, ;
The mean number of busy servers, ;
The mean number of customers in the queue, .
The mean number of customers in the system, .
The following vectors of dimension
comprise the policy-dependent values
and policy-independent values
,
where the first elements of the vectors are respectively
and
. Denote by
one of the performance characteristics
,
,
and
.
Proposition 1. The performance measure satisfies the relationwhere the vector is a solution of the system The matrix is obtained from by removing the first column and the first row, and Proof. We multiply the both sides of the equality (
9) by the row-vector of the stationary state probabilities
,
where
for the corresponding function
is obviously equal to the performance measure
. The following sequence of relations
validates the statement. □
The following measures characterize the behaviour of the system in a busy period which we define as a duration starting when the arrived customer enters the empty system in state and finishes when the system visits again after a service completion.
The mean length of a busy period, ;
The mean number of customers served in a busy period by the kth server, ;
The total mean number of customers served in a busy period,
.
In the following proposition we describe a general way to calculate these characteristics for the fixed control policy f. Denote by one of the performance characteristics , and .
Proposition 2. The performance measure satisfies the relationwhere the vector is a solution of the system The matrix is obtained from by removing the first column and the first row, and Proof. Denote by
,
, the Laplace-Stiltjes transform (LST) of the probability density function (PDF)
for the first passage time to state
given that the initial state is
, the control policy is
f and by
the corresponding first moment. According to the first step analysis we get for the LST the system
We take into account that
, we can obtain from (
13) the system for the conditional moments
The system (
14) for the transition rates (
2) is of the form
By expressing relations (
15) in matrix form and taking into account that
we obtain the expressions (
11) for
.
Denote now by
,
, the probability generating function (PGF) of the PDF
of the number of service completion at server
k up to the end of busy period given that the initial state is
. With respect to the law of the total probability we get the following relations for the function
,
The first term on the right hand side of (
16) represents the transition to state
u accompanied with an event we count, that is a service completion at server
k. The second term stands for other possible transitions. The system (
16) can be rewritten in terms of the PGF in the following form,
The expressions (
17) can be modified using the property
in such a way that we get a system for the corresponding first moments,
For the model under study the system (
18) is of the form
The last system can be also expressed in form (
11) for
and
. For the mean total number of customers served
the term
on the right hand side of (
19) must be replaced by
. □
Finally, one more performance measure in this section is of our interest, namely, the distribution of the maximal queue length in a busy period for the given control policy
f. Denote by
the maximum number of customers waiting in the queue during a busy period. For each fixed value
the event
is equivalent to the event that the process
starting in state
, where the first server is busy, hits the empty state
before visiting the subset of states
The probability
will be calculated by means of absorption probabilities for states in a set of absorbing states
given that the initial state is
. Denote by
the column-vectors of dimension
, where
n is fixed. Denote further by
one of performance characteristics
,
.
Proposition 3. The performance measure satisfies the relation where the vector is a solution of the system The matrix is obtained from by removing all columns and rows starting with the , and Proof. Denote by
the probability of absorption into empty state
starting in
, where
, where
as before is the state after an arrival to an empty state
. The following system can be obtained by conditioning on the next visited state Using again the first principles,
For the queueing system operation under the control policy
f the system (
23) is of the form,
Then after a routine of (block) identification the system (
24) can be expressed in form (
21), where
,
. □
As we can see, calculating the performance characteristics requires solving very similar systems of equations. Thus, the same algorithm can be used for this purpose by substituting appropriate values into vectors and b, This versatility of the proposed approach greatly simplifies the application of algorithmic types of analysis of complex controlled queueing systems. In principle, we assume that for a fixed control threshold policy, the structure of the infinitesimal matrix can be even fully defined for an arbitrary number of servers, as will be proposed in the next section for the special case of the control policy where all thresholds are equal to 1. Thus we believe that matrix expressions can be derived explicitly from the presented matrix systems for performance characteristics. We leave this problem for our research in the near future.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}