
Dynamic Susceptibility of Ferrofluids: The Numerical Algorithm for the Inverse Problem of Magnetic Granulometry



Abstract
:1. Introduction
2. Theory
2.1. Theoretical Model
2.2. Numerical Algorithm
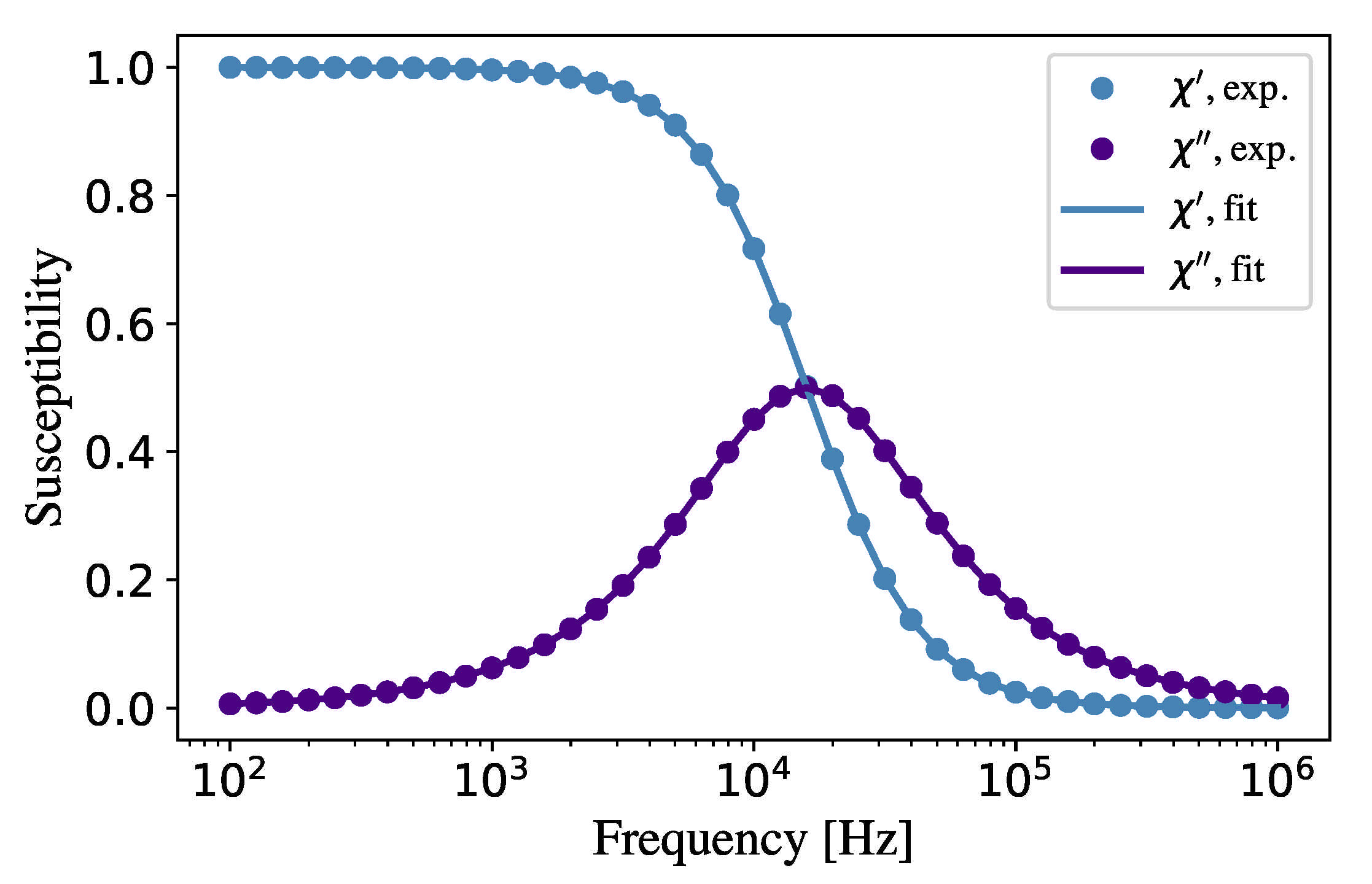
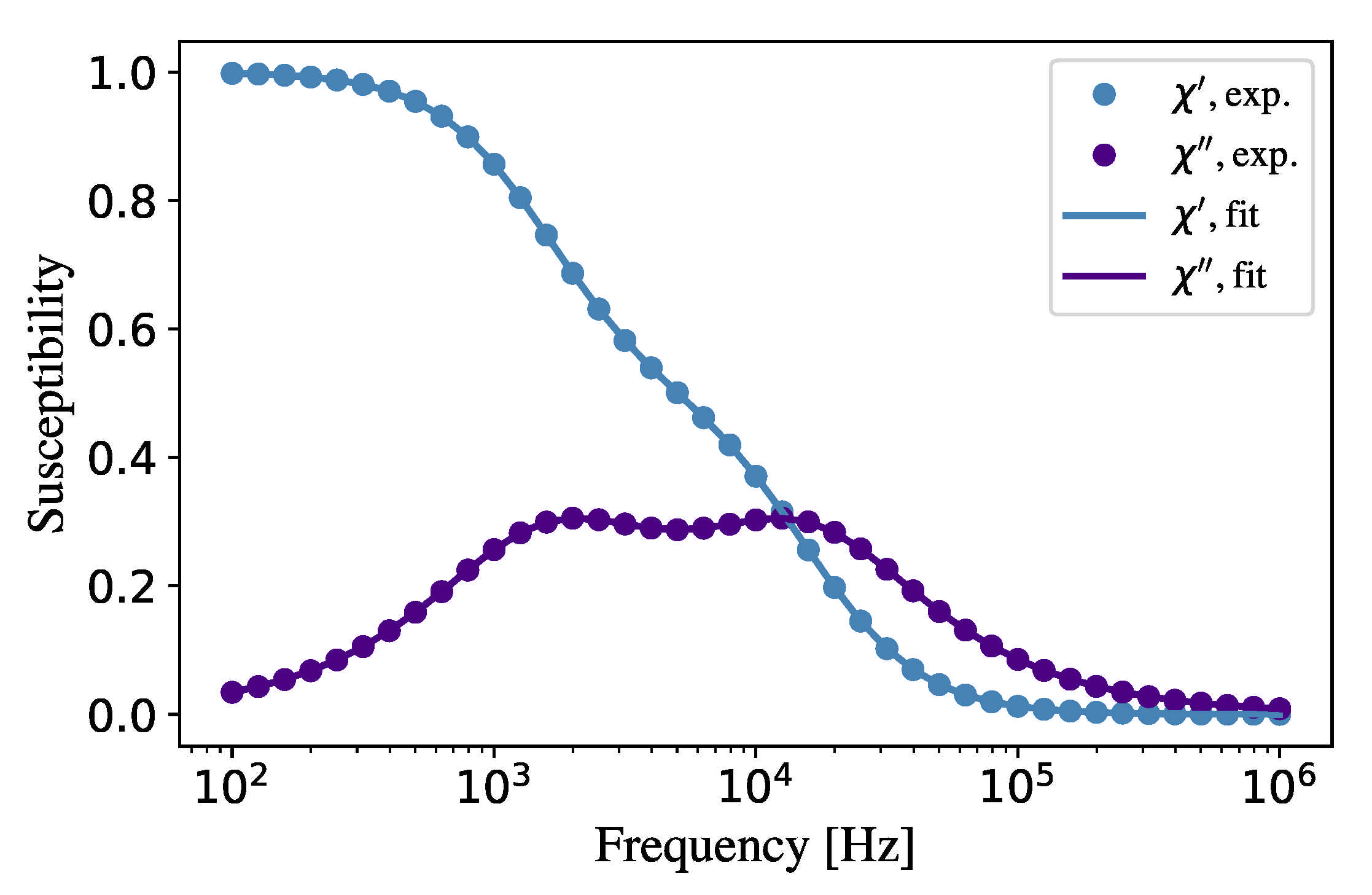
- We use the obtained numeric dataset of experimental points for the real, , and the imaginary, , susceptibilities. We count these data with sign , where M stands for the total number of experimentally measured susceptibilities at the frequencies . The static Langevin susceptibility is determined as the zero-frequency limit of on the basis of static MW susceptibility (6), .
- To reduce the number of unknown parameters for the optimization and to minimize the computation time, we fix the set of the fraction relaxation times being distributed evenly at the logarithmic scale, for example, . Importantly, the number of fractions does not exceed ten, . The amplitudes are to be determined numerically from the conditionwhere . Function can be any monotonously increasing sub-linear function of its variable z, given in criterion (8) in round brackets; we use here the function . Such a choice prevents a situation when the least-squares solution can become significantly biased to avoid very high residuals on outliers [20]. We insert the denominators in the functional (8) in order to equalize the contributions from the real and the imaginary parts of the dynamic susceptibility. The number of fitting parameters is equal to N, and it is not too much; the numerical optimization is very fast, and the optimization results are not affected by the experimental fluctuations.The optimization condition (8) includes summation over index j from 1 to M, so the total number of experimental data is used during the fitting for both susceptibilities, and . So, the algorithm requires the best coincidence between theory and experiment simultaneously for both susceptibilities.
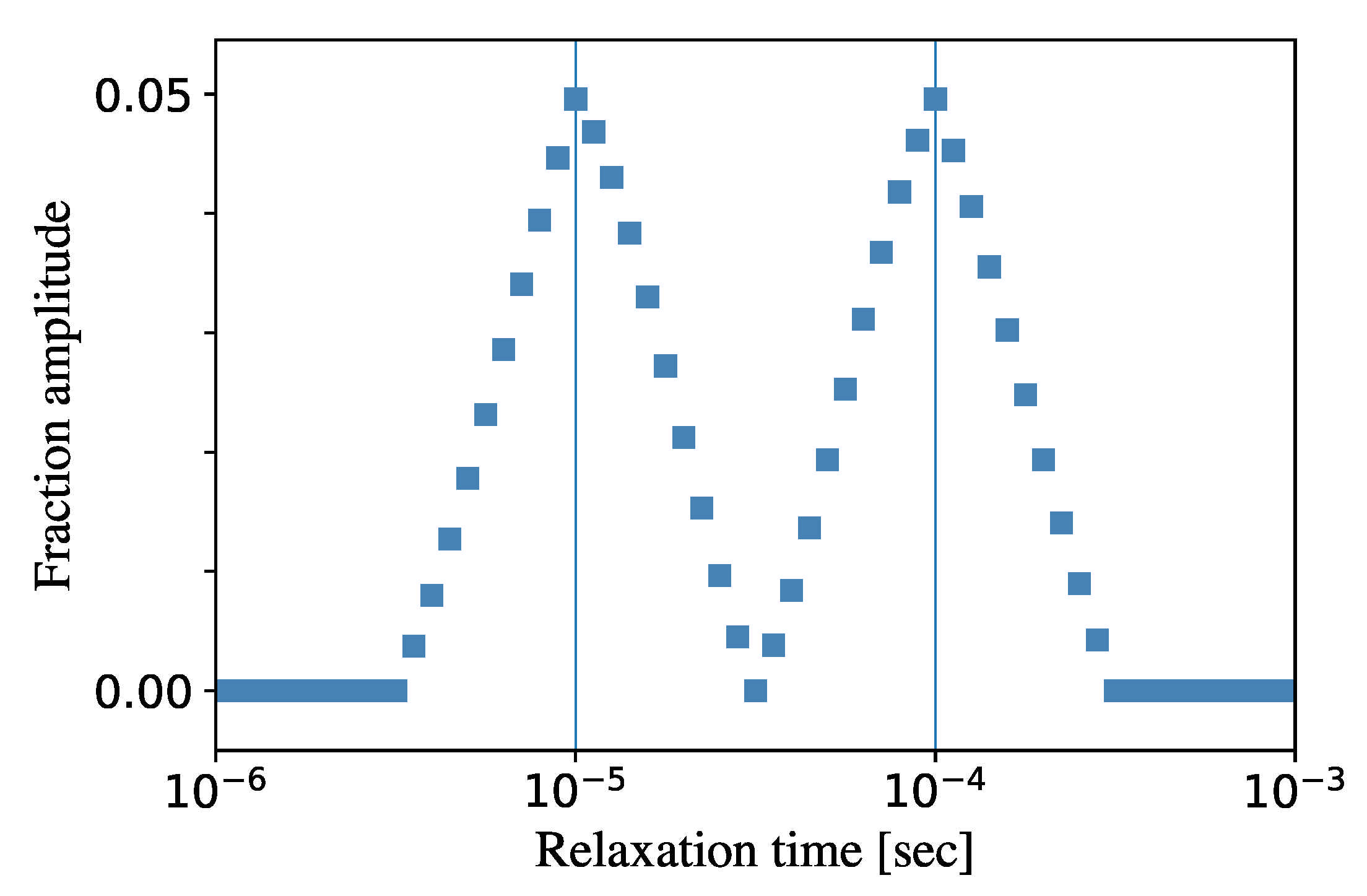
- With this first numerical fitting we get the N points at the plane , which describes roughly the relaxation time spectrum for MNP fractions. Of course, there are not many of these points, and they are well separated from each other. An example is given in Table 1. Then, we shift the set with some , which fits an integer number of times in an interval: . For the previous example , might be 0.1 and . So, the next set of fractions are characterized with the relaxation times, each of them is shifted with in the logarithmic sale in comparison with the previous set of fraction relaxation times, but the number of fraction N remains the same. To explain this point in more details we show Table 1 as an example when the number of fractions is chosen as 6. The first set of fractions is given in the first line “Fit 1”. The second set of fractions is presented in line “Fit 2”, and the relaxation times here are shifted with in the logarithmic scale. Then, we shift the fractions again and again, times, and for each case we apply the numerical optimization of criterion (8) for each new set of fractions independently of previous fittings, and we determine the amplitudes. After that we combine all fitted parameters together and normalize the amplitudes according to normalization condition (4), and so we get the number of points at the plane .
- For real ferrofluids the MNP relaxation times range from (the Néel superparamagnetic relaxation) to (the Brownian relaxation), depending on the MNP size. Testing of the described algorithm in this time range reveals that the stable and low-noisy fitting results can be obtained even for rather small number of fitting fractions: . The PC computation time takes no more than several seconds, and it increases with N according to parabolic law: .
- The advantages of this algorithm are: (i) it converges rapidly for each numerical realization for N fractions; (ii) we get the numerical fitting with m-times larger number of fractions than N; (iii) we get the ’smooth’ fitting because a small number of fractions N at each realization means that we average over the MNP contributions inside some interval of the relaxation times, so we avoid the influence of experimental errors. The resulting array of points should be considered as the desired spectrum of the MNP relaxation times.
2.3. Program Implementation
3. Results
4. Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| AC magnetic field | Alternative current magnetic field |
| MNP | Magnetic nanoparticles |
| MW | Modified Weiss theory |
References
- Rosensweig, R.E. Ferrohydrodynamics; Courier Corporation: North Chelmsford, MA, USA, 2013. [Google Scholar]
- Rubia-Rodríguez, I.; Santana-Otero, A.; Spassov, S.; Tombácz, E.; Johansson, C.; De La Presa, P.; Teran, F.J.; Morales, M.d.P.; Veintemillas-Verdaguer, S.; Thanh, N.T.K.; et al. Whither Magnetic Hyperthermia? A Tentative Roadmap. Materials 2021, 14, 706. [Google Scholar] [CrossRef]
- Guba, S.; Horvath, B.; Molnar, G.; Szalai, I. A double cell differential thermometric system for specific loss power measurements in magnetic hyperthermia. Measurement 2021, 169, 108652. [Google Scholar] [CrossRef]
- Kallumadil, M.; Tada, M.; Nakagawa, T.; Abe, M.; Southern, P.; Pankhurst, Q.A. Suitability of commercial colloids for magnetic hyperthermia. J. Magn. Magn. Mater. 2009, 321, 1509–1513. [Google Scholar] [CrossRef]
- Fatima, H.; Charinpanitkul, T.; Kim, K.S. Fundamentals to Apply Magnetic Nanoparticles for Hyperthermia Therapy. Nanomaterials 2021, 11, 1203. [Google Scholar] [CrossRef]
- Billings, C.; Langley, M.; Warrington, G.; Mashali, F.; Johnson, J.A. Magnetic Particle Imaging: Current and Future Applications, Magnetic Nanoparticle Synthesis Methods and Safety Measures. Int. J. Mol. Sci. 2021, 22, 7651. [Google Scholar] [CrossRef] [PubMed]
- Stueber, D.D.; Villanova, J.; Aponte, I.; Xiao, Z.; Colvin, V.L. Magnetic Nanoparticles in Biology and Medicine: Past, Present, and Future Trends. Pharmaceutics 2021, 13, 943. [Google Scholar] [CrossRef] [PubMed]
- Draack, S.; Ludwig, F.; Schilling, M.; Viereck, T. Dynamic gelation process observed in Cartesian magnetic particle imaging. J. Magn. Magn. Mater. 2021, 522, 167478. [Google Scholar] [CrossRef]
- Lu, C.; Han, L.; Wang, J.; Wan, J.; Song, G.; Rao, J. Engineering of magnetic nanoparticles as magnetic particle imaging tracers. Chem. Soc. Rev. 2021, 50, 8102–8146. [Google Scholar] [CrossRef] [PubMed]
- Lakhtina, E.; Pshenichnikov, A. Dispersion of magnetic susceptibility and the microstructure of magnetic fluid. Colloid J. 2006, 68, 294–303. [Google Scholar] [CrossRef]
- Kharitonskii, P.; Kamzin, A.; Gareev, K.; Valiullin, A.; Vezo, O.; Sergienko, E.; Korolev, D.; Kosterov, A.; Lebedev, S.; Gurylev, A.; et al. Magnetic granulometry and Mössbauer spectroscopy of FemOn–SiO2 colloidal nanoparticles. J. Magn. Magn. Mater. 2018, 461, 30–36. [Google Scholar] [CrossRef]
- Lysenko, S.N.; Lebedev, A.V.; Astaf’eva, S.A.; Yakusheva, D.E.; Balasoiu, M.; Kuklin, A.I.; Kovalev, Y.S.; Turchenko, V.A. Preparation and magneto-optical behavior of ferrofluids with anisometric particles. Phys. Scr. 2020, 95, 044007. [Google Scholar] [CrossRef]
- Bender, P.; Balceris, C.; Ludwig, F.; Posth, O.; Bogart, L.K.; Szczerba, W.; Castro, A.; Nilsson, L.; Costo, R.; Gavilán, H.; et al. Distribution functions of magnetic nanoparticles determined by a numerical inversion method. New J. Phys. 2017, 19, 073012. [Google Scholar] [CrossRef] [Green Version]
- Ivanov, A.O.; Zverev, V.S.; Kantorovich, S.S. Revealing the signature of dipolar interactions in dynamic spectra of polydisperse magnetic nanoparticles. Soft Matter 2016, 12, 3507–3513. [Google Scholar] [CrossRef] [Green Version]
- Debye, P. Polar Molecules; Chemical Catalog Company: New York, NY, USA, 1929. [Google Scholar]
- Ivanov, A.O.; Camp, P.J. Theory of the dynamic magnetic susceptibility of ferrofluids. Phys. Rev. E 2018, 98, 050602. [Google Scholar] [CrossRef] [Green Version]
- Sindt, J.O.; Camp, P.J.; Kantorovich, S.S.; Elfimova, E.A.; Ivanov, A.O. Influence of dipolar interactions on the magnetic susceptibility spectra of ferrofluids. Phys. Rev. E 2016, 93, 063117. [Google Scholar] [CrossRef] [Green Version]
- Ivanov, A.O.; Kantorovich, S.S.; Zverev, V.S.; Elfimova, E.A.; Lebedev, A.V.; Pshenichnikov, A.F. Temperature-dependent dynamic correlations in suspensions of magnetic nanoparticles in a broad range of concentrations: A combined experimental and theoretical study. Phys. Chem. Chem. Phys. 2016, 18, 18342–18352. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lebedev, A.; Kantorovich, S.; Ivanov, A.; Arefyev, I.; Pshenichnikov, A. Weakening of magnetic response experimentally observed for ferrofluids with strongly interacting magnetic nanoparticles. J. Mol. Liq. 2019, 277, 762–768. [Google Scholar] [CrossRef]
- Triggs, B.; McLauchlan, P.F.; Hartley, R.I.; Fitzgibbon, A.W. Bundle adjustment—A modern synthesis. In Proceedings of the International Workshop on Vision Algorithms, Corfu, Greece, 20–25 September 1999; pp. 298–372. [Google Scholar]
- Storn, R.; Price, K. Differential evolution–a simple and efficient heuristic for global optimization over continuous spaces. J. Glob. Optim. 1997, 11, 341–359. [Google Scholar] [CrossRef]
- Virtanen, P.; Gommers, R.; Oliphant, T.E.; Haberland, M.; Reddy, T.; Cournapeau, D.; Burovski, E.; Peterson, P.; Weckesser, W.; Bright, J.; et al. SciPy 1.0: Fundamental Algorithms for Scientific Computing in Python. Nat. Methods 2020, 17, 261–272. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hunter, J.D. Matplotlib: A 2D graphics environment. Comput. Sci. Eng. 2007, 9, 90–95. [Google Scholar] [CrossRef]
- Zaharie, D. Critical values for the control parameters of differential evolution algorithms. In Proceedings of the 8th International Conference on Soft Computing (MENDEL), Brno, Czech Republic, 5–7 June 2002; pp. 62–67. [Google Scholar]
- Jeyakumar, G.; Velayutham, C.S. An empirical comparison of differential evolution variants on different classes of unconstrained global optimization problems. In Proceedings of the 2009 World Congress on Nature & Biologically Inspired Computing (NaBIC), Coimbatore, India, 9–11 December 2009; pp. 866–871. [Google Scholar]
- Wormington, M.; Panaccione, C.; Matney, K.; Bowen, D.K. Characterization of structures from X-ray scattering data using genetic algorithms. Philos. Trans. R. Soc. Lond. Ser. A Math. Phys. Eng. Sci. 1999, 357, 2827–2848. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Fit | ||||||
|---|---|---|---|---|---|---|
| 1 | −7 | −6 | −5 | −4 | −3 | −2 |
| 2 | −6.8 | −5.8 | −4.8 | −3.8 | −2.8 | −1.8 |
| 3 | −6.6 | −5.6 | −4.6 | −3.6 | −2.6 | −1.6 |
| 4 | −6.4 | −5.4 | −4.4 | −3.4 | −2.4 | −1.4 |
| 5 | −6.2 | −5.2 | −4.2 | −3.2 | −2.2 | −1.2 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ivanov, A.O.; Zverev, V.S. Dynamic Susceptibility of Ferrofluids: The Numerical Algorithm for the Inverse Problem of Magnetic Granulometry. Mathematics 2021, 9, 2450. https://doi.org/10.3390/math9192450
Ivanov AO, Zverev VS. Dynamic Susceptibility of Ferrofluids: The Numerical Algorithm for the Inverse Problem of Magnetic Granulometry. Mathematics. 2021; 9(19):2450. https://doi.org/10.3390/math9192450
Chicago/Turabian StyleIvanov, Alexey O., and Vladimir S. Zverev. 2021. "Dynamic Susceptibility of Ferrofluids: The Numerical Algorithm for the Inverse Problem of Magnetic Granulometry" Mathematics 9, no. 19: 2450. https://doi.org/10.3390/math9192450
APA StyleIvanov, A. O., & Zverev, V. S. (2021). Dynamic Susceptibility of Ferrofluids: The Numerical Algorithm for the Inverse Problem of Magnetic Granulometry. Mathematics, 9(19), 2450. https://doi.org/10.3390/math9192450