1. Introduction
The paper presents the results of a research study in the field of mathematical methods applied to wind energy. The paper includes examples of modeling, control, and optimization in order to increase efficiency in the exploitation of wind energy.
The purpose of the work is the analysis of methods for maximum power point tracking in the operation of wind turbines, taking as a criterion for performance the energy generated. Three methods were chosen, namely: on–off control, fuzzy control, and neural predictive control. The significance of the study is that it shows the efficiency of these methods, compared to each other and compared to the case in which the turbine operates freely.
Several papers are cited, as follows, to show the current state of the literature in the field. The method of the maximum power point tracking is often used in the literature for wind turbine control. Some papers using this method can be mentioned. The paper [
1] presents an adaptive algorithm for low energy systems, functioning at turbulent wind. The proposed algorithm combines the computational behavior of hill climb search and power signal feedback control algorithms for tracking of maximum power point. The proposed method from [
2] combines hysteresis control with tip speed ratio control using a power coefficient curve. The effectiveness of the proposed algorithm is verified by simulation of a 3 kW wind turbine system. The paper [
3] presents a maximum power point tracking system for a small wind turbine connected to a DC micro-grid. The system has a permanent magnet synchronous generator interfaced to the DC micro-grid through a rectifier and a boost converter. The proposed system uses the DC link power and voltage to obtain the required inductor current in the converter to provide maximum power output at all wind speeds. The paper [
4] is based on the same power conversion, but it proposed a method that provides a reference current for a proportional integral inductor current controller. Researchers in the field have conducted comparative studies between various technical solutions based on the maximum power point tracking method. In the paper [
5], the tip speed ratio and optimal torque methods are analyzed for a 1.5 MW wind turbine model. Their performances are compared through simulation under different wind speed characteristics. A comparative study of different maximum power point tracking methods for a wind energy system based on a permanent magnet synchronous generator is presented in paper [
6]. The analyzed techniques are: hill climbing search, optimal torque control, power signal feedback, and fuzzy logic control. The following characteristics are analyzed: the wind system energy efficiency, the response time, the maximum power to be achieved, and the system behavior during the process. The system was simulated under variable wind speed conditions. The authors considered the fuzzy logic control more efficient compared to other algorithms. The results of the study on wind turbine control systems were published as technical reports in universities, including mathematical models and simulations in Matlab/Simulink [
7]. Fuzzy logic is a specific mathematical method of artificial intelligence used in wind turbine control with the maximum power point tracking. A comparative analysis between proportional–integral control and fuzzy logic control is made in [
8]. The authors considered, based on simulations, that fuzzy control is better, faster, and more accurate. However, the proportional–integral control has a better ration quality/price. The use of neural networks and neuro-fuzzy networks are also common in the literature. Two control methods for maximum power point tracking applied to a wind turbine module system using the permanent magnet synchronous generators (PMSG) in variable speed atmospheric wind conditions are compared in [
9]. The control systems, with artificial neural networks and neuro-fuzzy controllers, are modeled, simulated, and analyzed by using Matlab/Simulink software. In the paper [
10], a laboratory prototype of a wind system with a permanent magnet synchronous generator, with an artificial neural network for maximum power point tracking, is modeled in a Matlab/Simulink environment. Maximum power point tracking is also used in photovoltaic systems. A review of some technical solutions is presented in [
11]. The papers [
12,
13] review the state-of-the-art available maximum power point tracking algorithms. In [
12], the algorithms are classified according to the control variable, namely, with and without sensor, and also based on the technique used to locate the maximum peak. The comparison is made for various speed responses and the capability to achieve the maximum energy yield. The wind energy system was simulated using Matlab/Simulink software. The paper [
13] takes into consideration the fact that choosing an exact algorithm for a particular application requires good skills and each algorithm has advantages and disadvantages.
Some controversial and diverging hypotheses are considered. The wind turbine must operate in a certain geographical area. In this area, the wind energy resource must be known. The wind has speeds in a wide range of values. The wind generator system must capture and convert as much energy as possible. For this purpose, we are looking for methods to increase energy efficiency, in order to operate at various wind speeds, following the point of maximum power on the mechanical characteristic of the turbine. However, this maximum power point is an unstable equilibrium point, and the turbine has an infinity of such points. The tendency in the point of maximum power is that the system, once removed from that point, does not return to it. Moreover, any point on the characteristic of mechanical power–speed in which the wind turbine works is an unstable equilibrium point. The tracking methods presented in the literature lead the wind turbine–electric generator system on different state trajectories.
In this paper, a low power turbine is taken into consideration. The paper presents, in
Section 2, preliminary information related to wind energy capture, aspects regarding the structure of a wind turbine control system, the mathematical model of the wind turbine, its characteristics, and the definition of the energy performance criterion. The third section presents the tracking methods considered, namely: on–off control with dead band, fuzzy control, and neural predictive control. A set of nine maximum power point tracking rules has been developed and implemented in the on–off control and fuzzy control in a numerical manner. For the fuzzy control method, the fuzzy variables, the rule base, the membership functions, the inference method, and defuzzification method were chosen. For the neural predictive control method, a neural identification of the wind turbine was performed and the neuronal predictive controller was dimensioned. The methods were modeled and simulated in Matlab/Simulink for variable wind speeds. The results that can be obtained with these methods of maximum power point tracking are presented in
Section 4. The characteristics obtained by simulations are compared, analyzed, and discussed in
Section 5.
The main contribution of the paper can be summarized as a comparative analysis of three maximum power point tracking methods: on–off control, fuzzy control, and neural predictive control, with application in the particular case of a low power wind turbine operating at a variable wind speed. The behaviors of the system for each of these three methods are analyzed. The energy efficiency of these methods is analyzed. The results are compared with those obtained in the case of unfavorable turbine operation at low load torque, without maximum power point tracking. The analyzed methods ensure the production of an energy up to 60% higher than in the case without tracking. The energy differences between the three maximum power point tracking methods are small; they do not exceed 5%.
2. Preliminaries
2.1. General Considerations
In the last years, the production of electricity based on wind energy has developed as part of the so-called renewable energy [
14,
15]. The wind turbine is a device that converts the kinetic energy of the wind into mechanical energy. Mechanical energy is used to produce electricity. Low-power turbines are used to charge batteries or as auxiliary power sources. High-power turbines are commercial sources of electricity. The wind energy resource available in a given geographical location is described by the physical size of the energy density, which is calculated as the average of the annual energy available per square meter of a turbine propeller. Geographical places are classified according to their energy class into seven energy classes. Class 1 represents places with the lowest density, below 200 W/m
2. In addition, the class 7 represents the places with the highest density, between 800 and 2000 W/m
2 [
16]. Total wind energy harvesting is practically impossible, because the air taken by the turbine must leave the turbine. In the literature, it is considered that the maximum coefficient of extraction of wind power at a wind turbine is 59% of the total theoretical power. Energy losses in the wind turbine, such as mechanical losses by friction at the turbine shaft, electromagnetic losses at the electric generator, and losses at the electronic power converter, lead to a decrease in energy generated by the wind installation. In the literature, it is considered that, due to these losses, only a third of the wind energy is used.
A horizontal shaft turbine has the following components: propeller, rotor shaft, mechanical coupling, and a braking system. The turbine must be directed in the opposite direction to the wind. High-power turbines have a wind sensor, coupled with a turbine-positioning servomotor. The mechanical coupling has the role of transforming the low speed rotation of the propeller into a higher speed rotational movement, suitable for driving the electric generator, which operates at a speed of hundreds of revolutions per minute. Wind turbines are designed to harness the wind energy that exists at a particular location. This fact requires aerodynamic modeling to determine the optimal tower height, the automatic steering system, number of blades, and blade shape. The turbines used to produce electricity have two or three blades and are driven by computer-controlled motors, which direct them in the wind direction. Some installations operate at constant speed. However, working at variable speeds can increase energy production. Horizontal shaft turbines for the production of commercial electricity were manufactured from 0.6 MW to 7.5 MW [
16].
The following rated parameters are taken into consideration: the air density, maximum rotational speed in operation, the extreme wind speed, the maximum rotational speed on a short time, the value of the maximum energy production per year, and the electrical power generator efficiency.
2.2. General Aspects of the Wind Turbine Control Structures
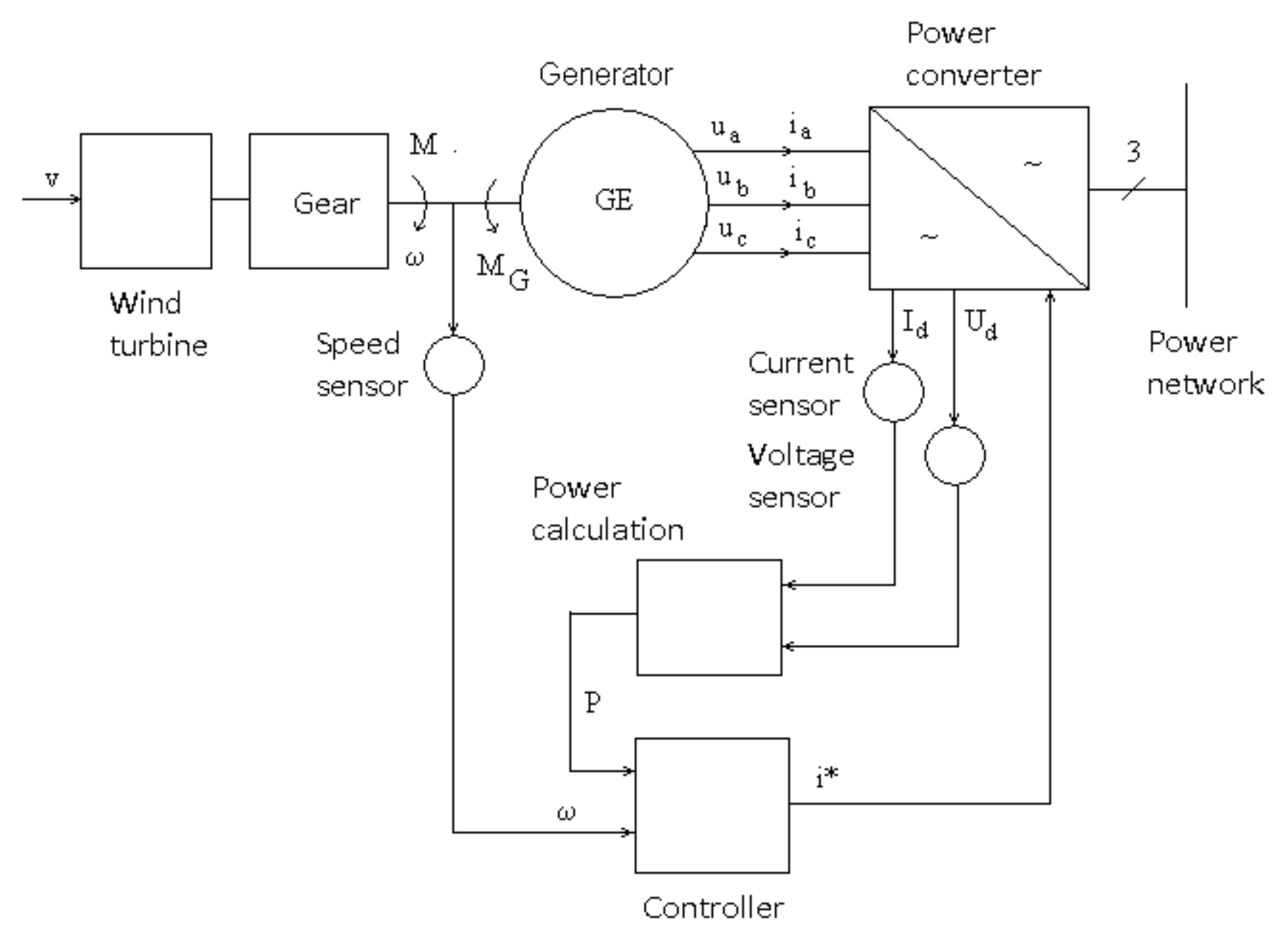
The control structure taken into consideration in this paper, presented in
Figure 1, is used on a large scale in wind conversion installations.
The wind turbine drives through a mechanical gear an electric generator GE, which may be synchronous or asynchronous. The generator supplies the alternating voltages ua,b,c and currents ia,b,c. The alternative voltage is converted by a rectifier in direct voltage Ud, which, in turn, is converted to alternative voltage supplied in the network. The current is controlled to the electronic power converter so that the operating point of the turbine is changed. The current controller works based on the information about the speed ω and power P. The speed ω, voltage Ud, and current Id are measured with sensors. The power is calculated based on the direct voltage and current. The controller sets the current reference i* of the generator load. This is a common control structure, which is used in applications based on maximum power point tracking by adjusting the speed at the turbine axe, controlling the generator with a variable load Id.
The turbine torque, speed, and power may be adjusted by controlling the Id current. The controller has two inputs, the speed ω and the power P. Its output is the current reference i*. The control efficiency is determined with a performance criterion, which is the generated energy W.
2.3. Wind Turbine Model
The following relations, well known in the literature, are used in practice for the wind turbine model [
14,
15,
16,
17,
18].
The mechanical torque
M developed by the turbine is given by the relation:
where
R is the radius of the turbine propeller,
v is the wind speed,
ρ is the air density, and
Cm is the torque coefficient, experimentally obtained for a certain wind turbine:
The value:
represents the transmission ratio of the turbine, where ω is the rotational speed of the turbine shaft.
The mechanical power developed by the turbine is calculated with the general relation from the physics of the rotational movement:
It can be seen that the above relationships are nonlinear.
The simulation parameters of the system are rated power
Pn = 5.5 kW; rotation speed ω
r = 12.4 rad/s; the moment of inertia of the wind turbine
Jt = 140 kg·m
2; the moment of inertia of the electric generator
Jg = 1.05 kg·m
2; blade swept area
A = 19.6 m
2; turbine blade radius
R = 2.5 m; turbine constants: λ
0 = 3,
a = 0.0986,
b = 0.0113,
Cm0 = 0.0222; specific air density
ρ = 1.225 kg/m
3. These values are used in the current research performed in the university on an emulator installation of the wind power plant in Seusa, Romania [
17,
18].
The rated speed ration of the wind turbine λ0 is a parameter determined with measurements made in an aerodynamic tunnel or on the turbine placement. It is corrected according to experimental measurements. The maximum speed of the turbine is corrected in relation to it.
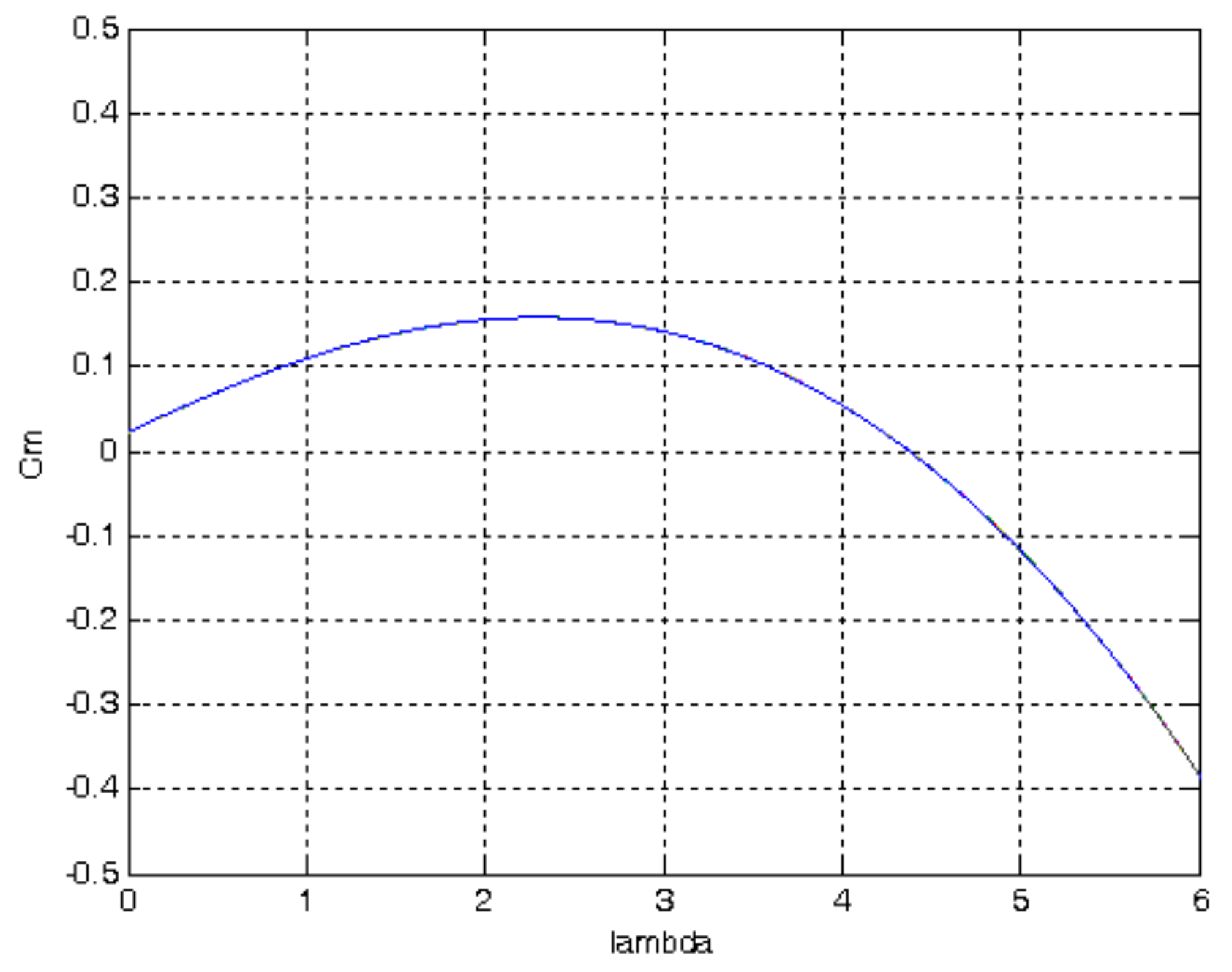
The following characteristics may be used in practice: the coefficient
Cm(λ), as a function of λ; the family of characteristics of the coefficient λ(ω;
v); the family of characteristics
Cm(ω;
v); the family of characteristics of the torque
M(ω;
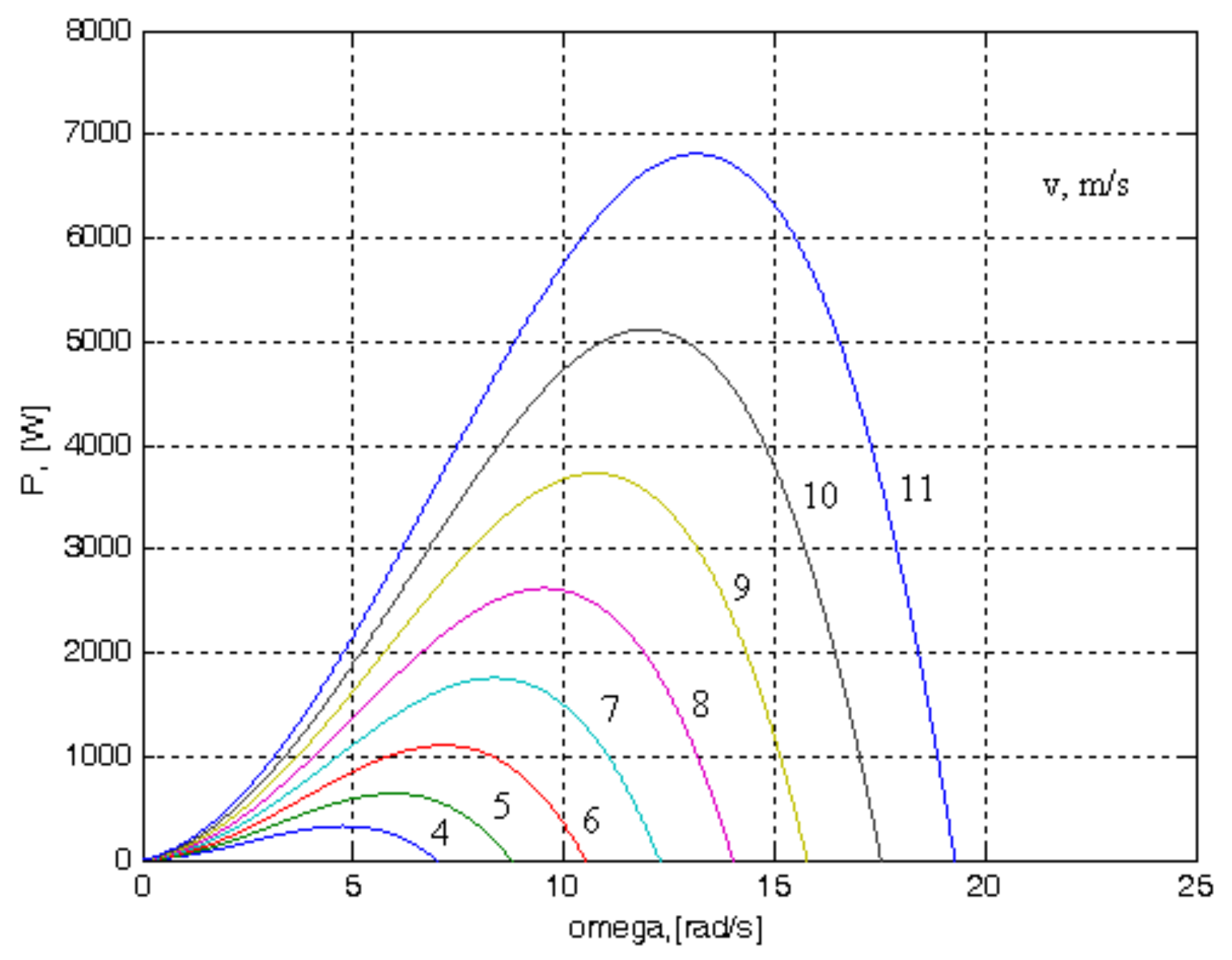
v); the family of characteristics of power
P(ω;
v), from
Figure 2,
Figure 3,
Figure 4,
Figure 5 and
Figure 6, respectively. All are functions of ω, with v as a parameter.
Figure 2,
Figure 3,
Figure 4,
Figure 5 and
Figure 6 were obtained by calculations using Equations (1)–(4) and the above numerical parameter values for different wind speeds.
The characteristic of the coefficient
Cm(λ) is constant for any value of the wind speed
v. The characteristics of the coefficient λ(ω;
v) are straight lines, the slope of the straight line is given by the wind speed
v, and λ is proportional to the rotational speed ω. The coefficient
Cm has a constant maximum value for any wind speed
v. The coefficient
Cm becomes negative for a ratio λ greater than a specific value. This aspect has a theoretic character. In simulation, for negative values of the coefficient
Cm, its value is considered zero. On these characteristics there is a domain (ω, λ) for which λ increases over the maximum value if ω increases or
v decreases. If the coefficient λ is less than a specific value of blocking, then the ratio ω/
v is less than a specific value. Their variations lead to possible sub-zero decreases in
Cm and blockages in the supply of torque and power. High variations under zero
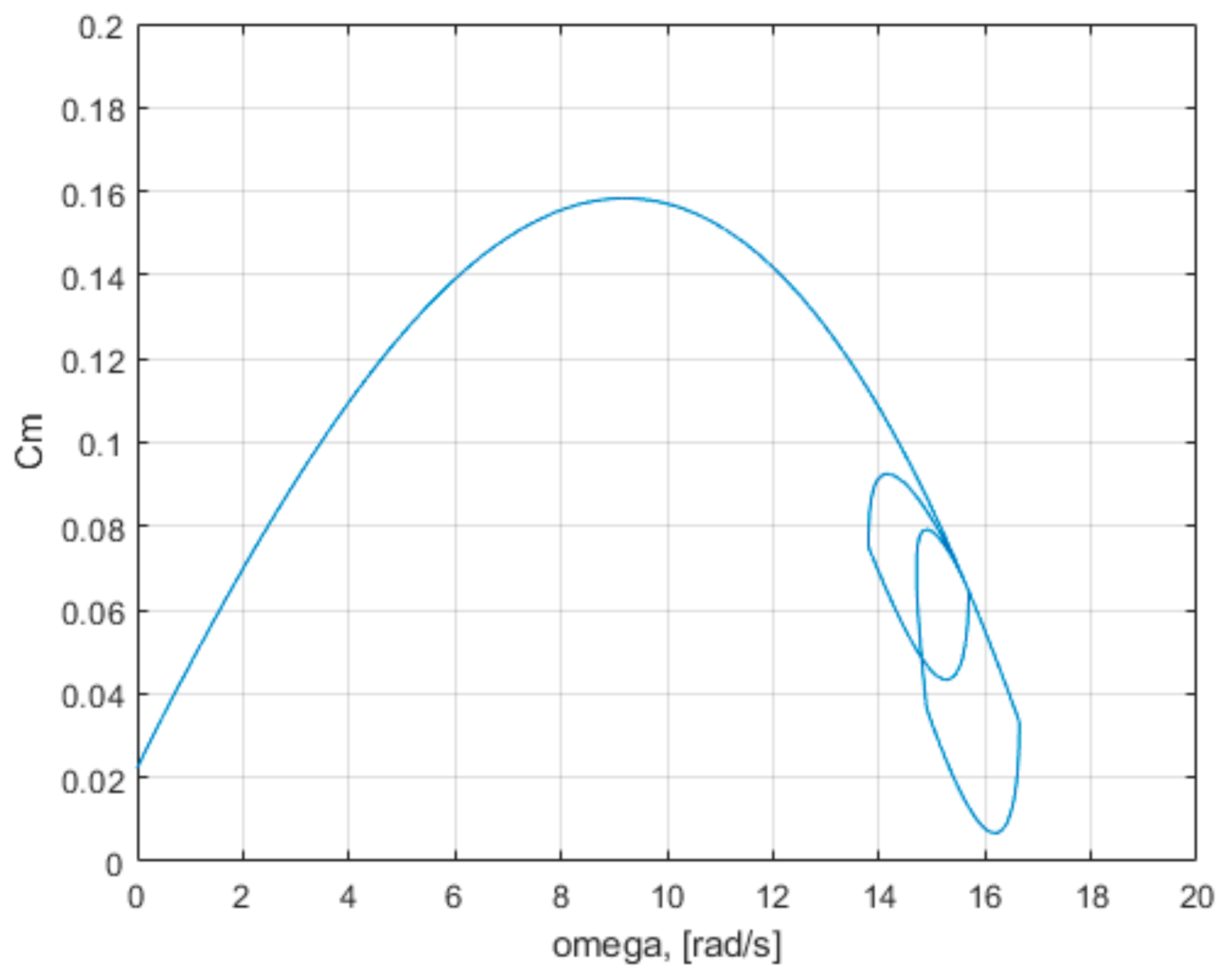
Cm, due to decreasing of wind speed or the increasing of the turbine rotation speed, produce jumps and blockages in the supply of torque and power. In
Figure 4, it is observed that, for ω = 0, the coefficient
Cm has a constant value equal to
Cm0 for any value of wind speed. The maximum value of coefficient
Cm varies depending on the wind speed. The speed value for which the coefficient
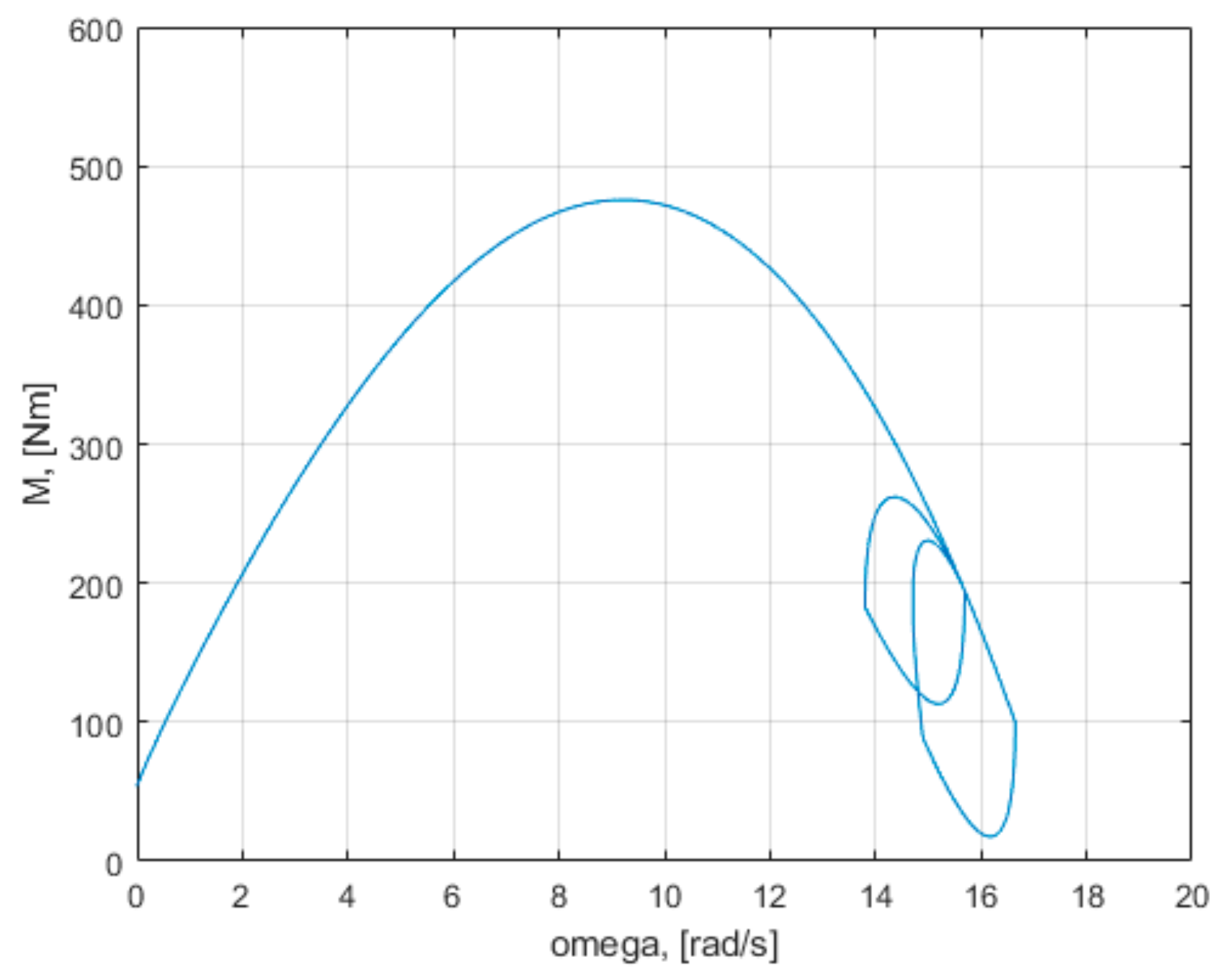
Cm becomes negative increases with increasing wind speed. This tells us that the turbine cannot have a high rotational speed if the wind speed is low. It is observed in
Figure 6 that the maximum torque, depends on the rotational speed ω and the wind speed
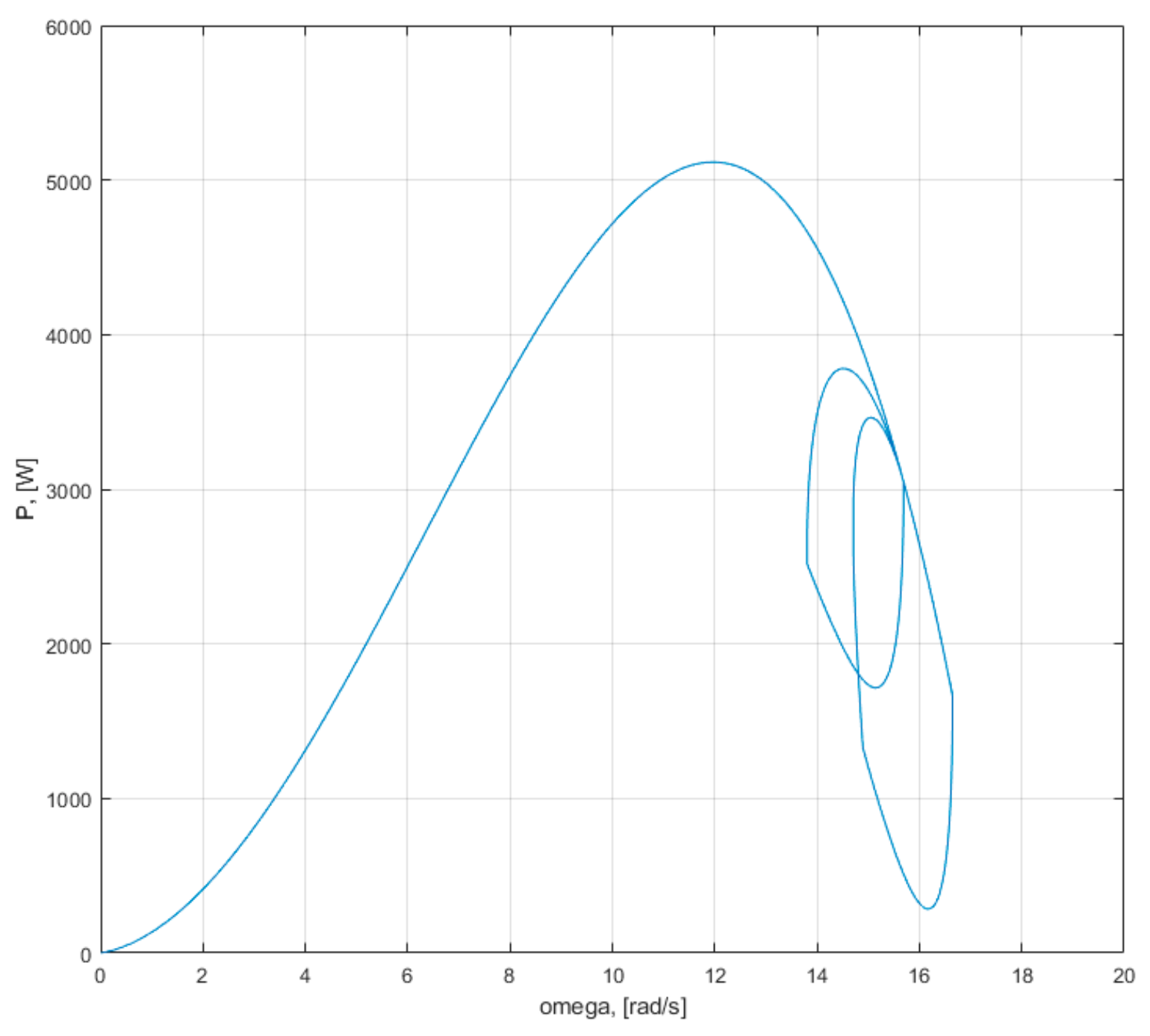
v, which is in accordance with the other characteristics. The torque has non-zero values for zero speed at non-zero wind values. The developed torque increases as the wind speed increases, which also allows the rotation speed to increase. It is observed that the maximum power depends on the rotation speed and the wind speed, which is in accordance with the other characteristics. The power has the value zero for zero speed, corresponding to the relation (4). The power developed increases as the wind speed increases, which also allows the speed of rotation to increase.
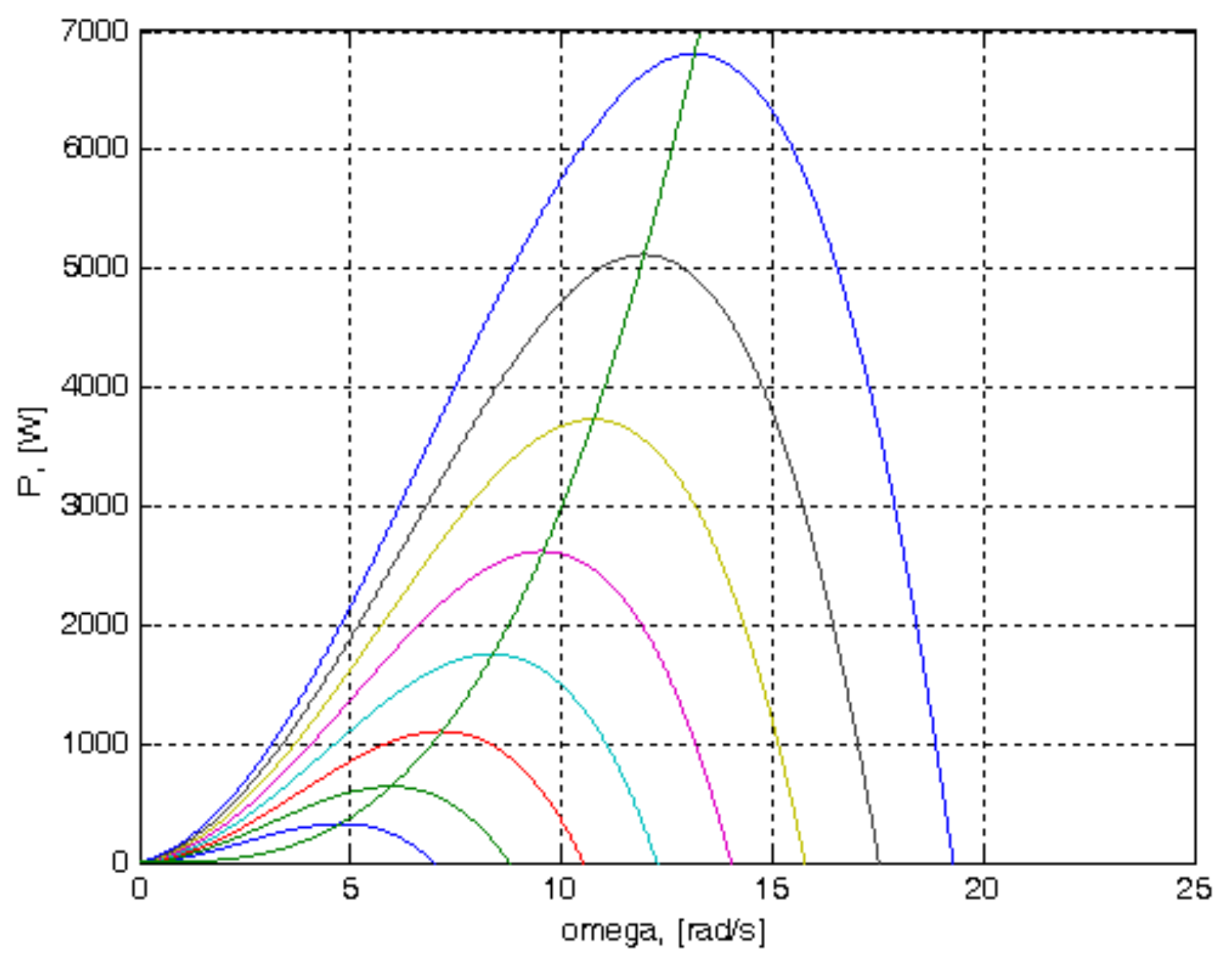
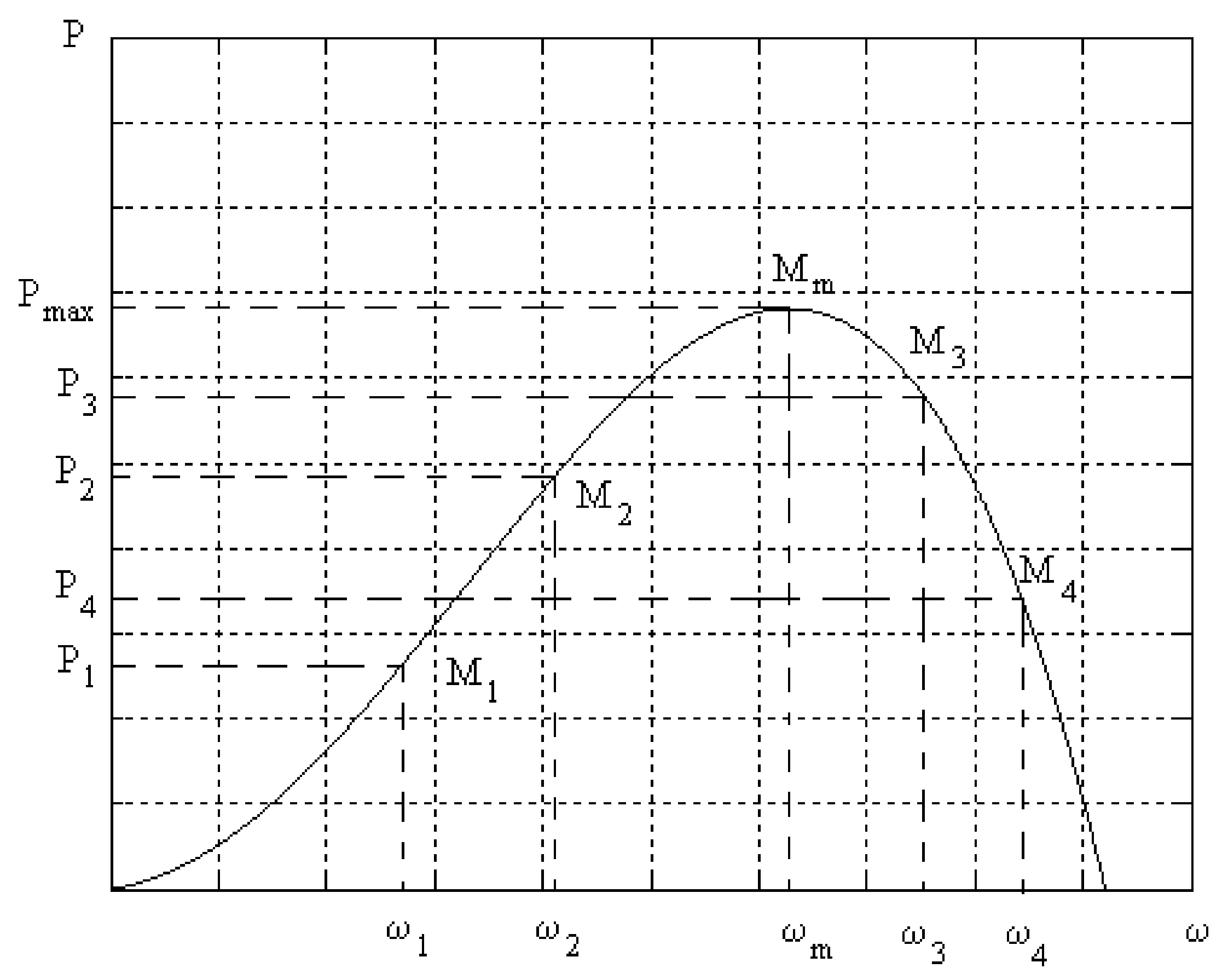
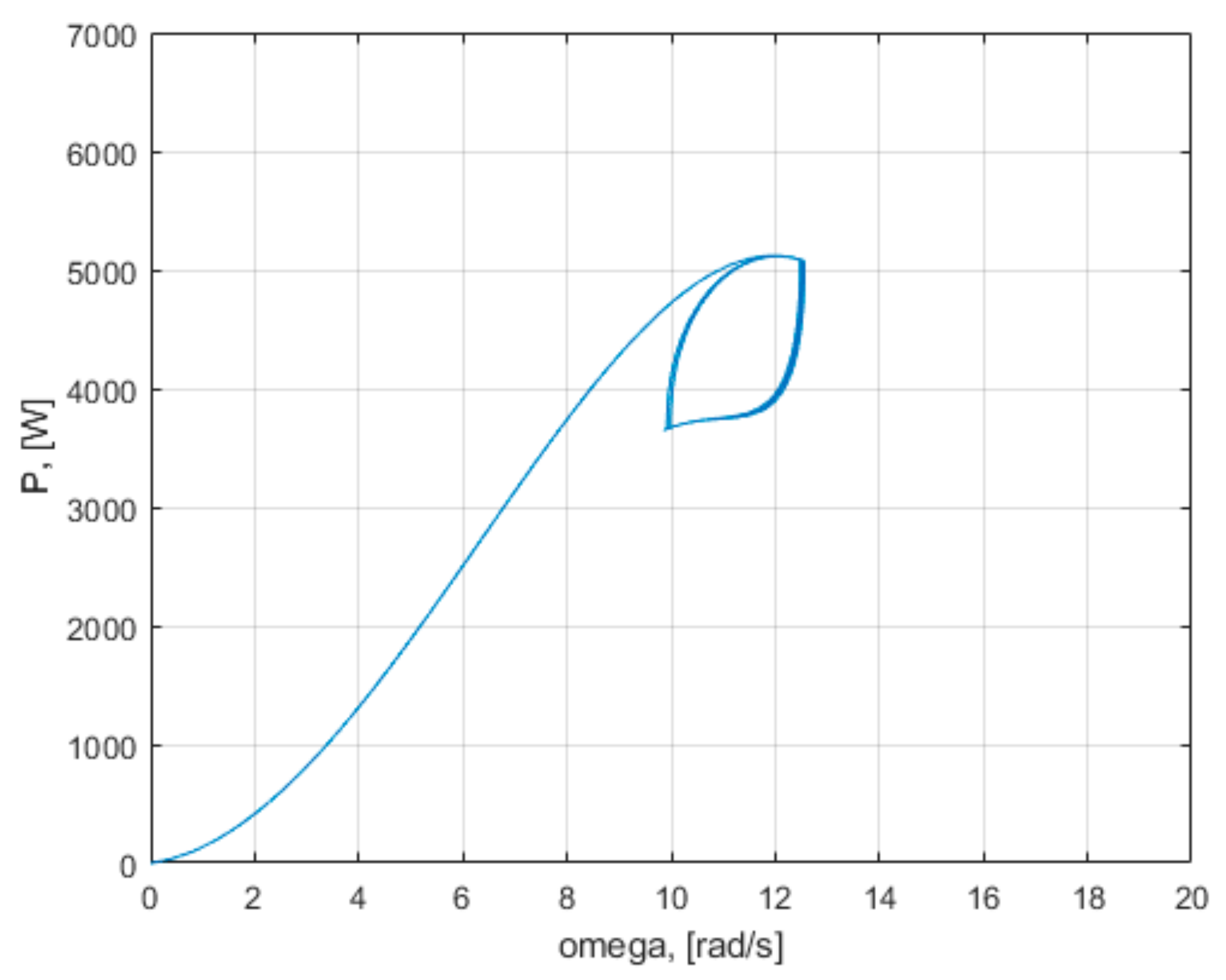
The maximum power on the characteristics of
Figure 7 is on a curve:
where
cP = 2.9881 for speed expressed in rad/s and
P in Watt.
Figure 7 presents the characteristic of maximum power as a function of speed, superimposed over the characteristics of power–speed. It is observed that this characteristic passes through the maximum points.
Since the speed is related to the wind speed, through relation (3), it can be said that the maximum power also depends on the cube of the wind speed.
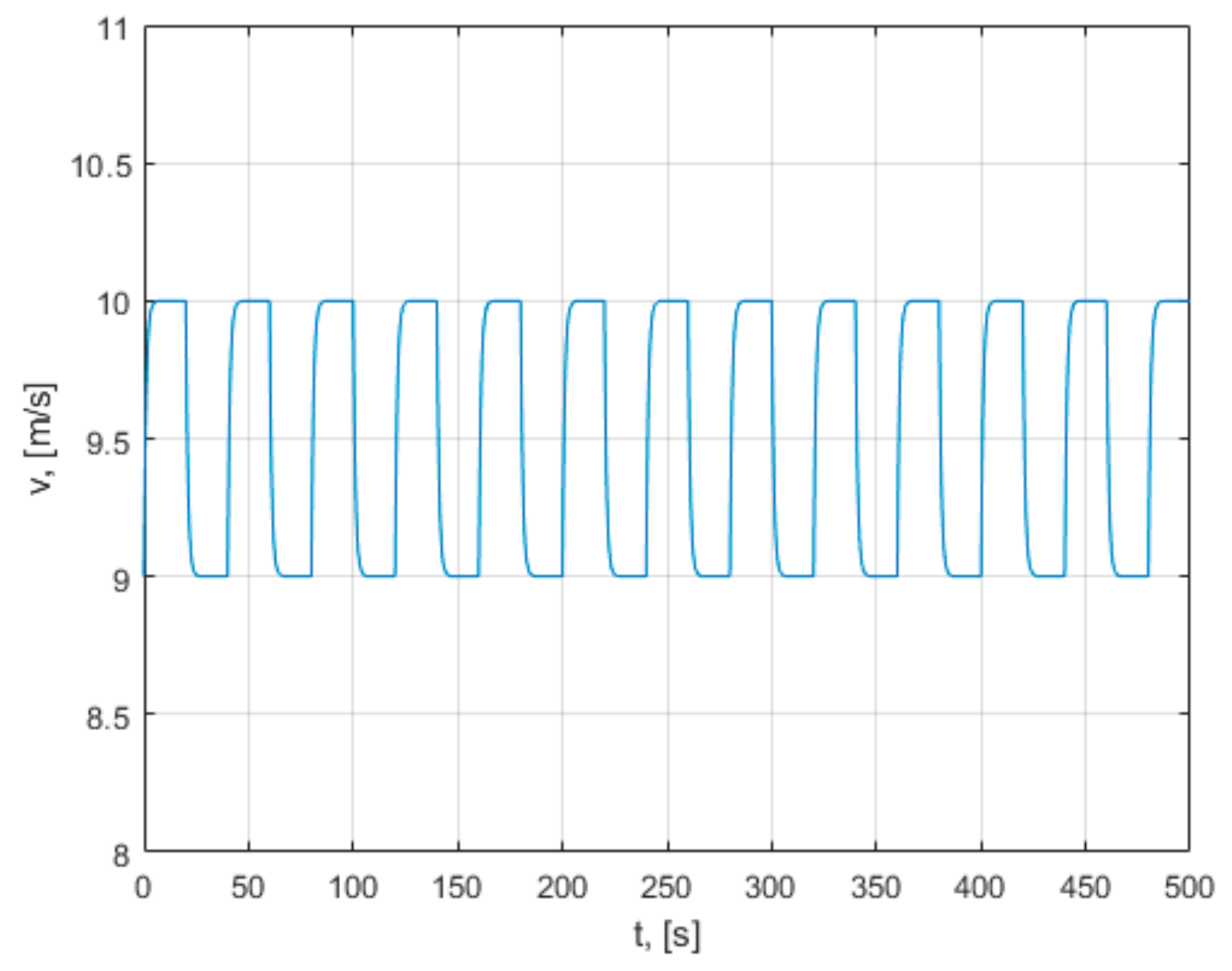
The analysis of the behavior of the wind turbine is done at various wind speeds specific to the geographical location. In the present paper, the analysis of the turbine operation was performed considering a variation in the wind speed from 0 to 10 m/s, and then a periodic change in the wind speed between 9 and 10 m/s, with a period of 40 s, for a duration of 500 s, as in
Figure 8.
In the simulation, it was chosen that the variation of the wind speed should not be done suddenly, but with a change after an equation of the first order, with a small time constant of the order of 1 s.
2.4. Dynamic Model of Wind Turbine
The variation of the rotation speed of the turbine shaft is given by Newton’s second law of dynamics:
where
J is the moment of inertia of the turbine axe,
M is the active mechanic torque developed by the turbine, given by the relation (1),
kf is the coefficient of friction at the turbine shaft, ω is the rotational speed of the turbine, and
MG is the load torque introduced by the electric generator. The moment of inertia
J is obtained as the sum of the moment of inertia of the turbine
Jt and the moment of inertia of the generator
JG:
The coefficient of friction kf is considered so that the resistive friction torque is 10% of the load torque.
The wind turbine control system has the following variables. The wind speed v is considered as the control input variable. The rotation speed ω and the power P are considered as the output variables. The load torque MG is a disturbing input variable.
The state Equation (6) is nonlinear, due to the fact that the expression of the active torque and the relations of other variables, given by (1)–(4), are nonlinear.
The wind turbine can be considered as a first-order system:
with a high time constant, given by the moment of inertia of the turbine shaft and the coefficient of friction. The rotational speed ω is the state variable.
From the analysis of state Equation (8), it is observed that the rotation speed changes if the rotation acceleration changes:
If the resulting torque
Mtot at the shaft increases, then the acceleration increases. If it decreases, the acceleration decreases. The way in which the rotation speed varies affects the operating point of the turbine on the power characteristics
P(ω;
v), as shown in
Figure 6, of the torque
M(ω;
v), as shown in
Figure 5, of the torque coefficient
Cm(ω;
v), as shown in
Figure 4, of the coefficient λ, as shown in
Figure 3, and the coefficient
Cm(λ), as shown in
Figure 2.
Observation: In order to always obtain the maximum power from the power characteristic
P(ω;
v) from
Figure 6 at various wind speeds, the wind turbine must have a rotation speed ω at which this maximum power is obtained. This goal will be pursued in the control strategies adopted in practice.
So, intelligent control rules can be developed based on human reasoning. A negative acceleration ε is required to decrease the rotation speed ω, which, at a constant wind speed v, is obtained by increasing the load torque MG. In order to increase the rotation speed ω, a positive acceleration ε is required, which, at a constant wind speed v, is obtained by decreasing the load torque MG.
Equations (1)–(4) and (8) form the mathematical model of the turbine.
Control methods lead the turbine on various state trajectories, to the maximum power points from the characteristics in
Figure 6 for various wind speeds
v. The plane of
Figure 6 may be considered as a phase plane or a state plane. The geometric representation of the trajectories of the dynamical system in the phase plane may be seen as a phase portrait. Each set of initial conditions is represented by a different curve or point. The maximum power co-ordinate points (
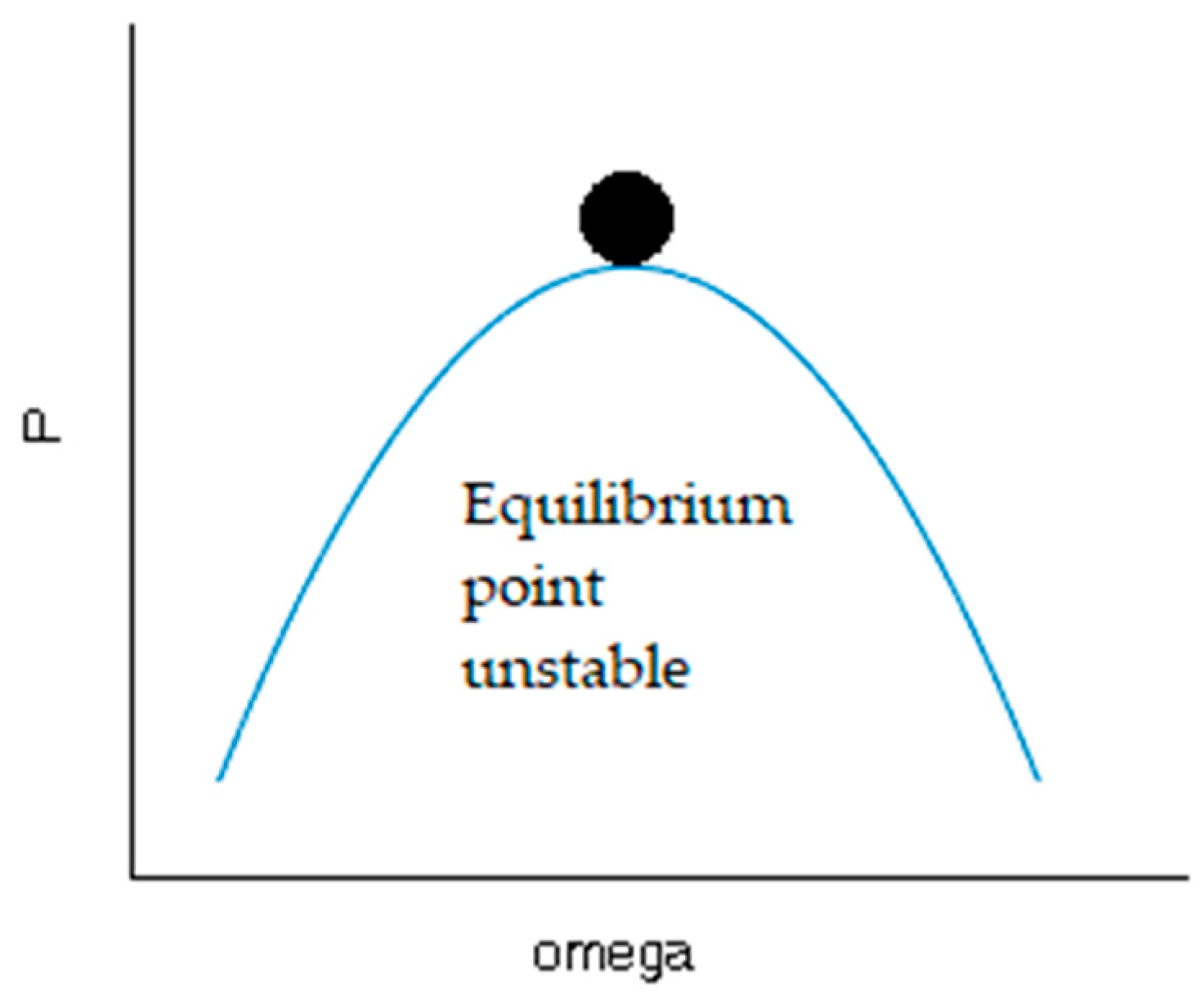
Pmax, ω) in the phase plane are equilibrium points. However, these equilibrium points are unstable, according to the classic example from
Figure 9.
The turbine has an infinite number of unstable equilibrium points. The main disadvantage of turbine control systems is due to this fact, namely, that it is desired that the operating points of the system be precisely these points of unstable equilibrium. The tendency of the system in the equilibrium point is important, if the system does not return to the equilibrium point, if a small initial condition offset is used, or it is moved away from the equilibrium point. The systems that regulate themselves back to their original operating point when perturbed are normally preferred. In this case, the system does not have this natural tendency, and a feedback control is added to change system behavior from unstable to stable. An analogy can be made between control of a wind turbine and that of a reverse pendulum, namely, in both cases the system is brought to the point of unstable equilibrium. In the literature, there are various mathematical methods of control, which lead the system on various state trajectories and try to keep it in the operating points of maximum power.
Sudden changes in wind speed lead to limit cycles in turbine operation. Limit cycles can reduce the performances of control systems. Oscillations could cause fatigue and damage to mechanical components. Limit cycles may also affect comfort and, ultimately, safety. It is necessary to know if limit cycles occur and to study their stability.
Generator and power converter models are simplified in this study. It is considered that the time constants of the generator and the converter are much smaller than the time constant of the turbine, and they do not influence the regulation. Moreover, in the simulation, the path from regulator to process is considered as a proportional element. Thus, the torque introduced by the generator
MG is proportional to the reference current:
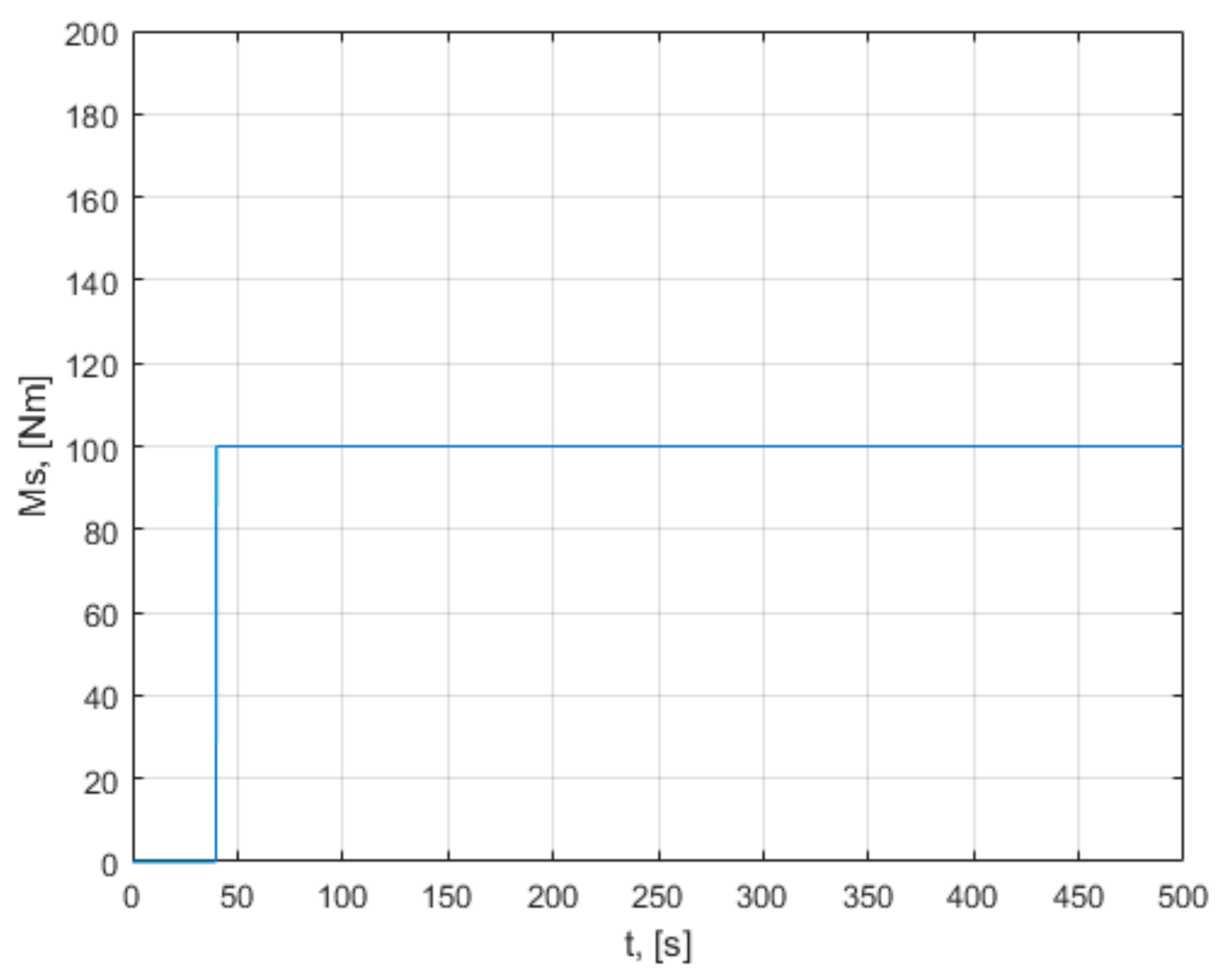
As a basis for comparison for the methods analyzed in the paper, an unfavorable case of operation of the wind turbine is taken. The turbine is considered to be working at high wind speeds, but with a constant, low value load torque. The results of the simulation analysis of this case are presented in
Appendix A. As can be seen from those characteristics, the turbine does not reach the maximum power points in the permanent regime, which leads to the need for some maxim power point tracking methods.
2.5. Performance Criterion
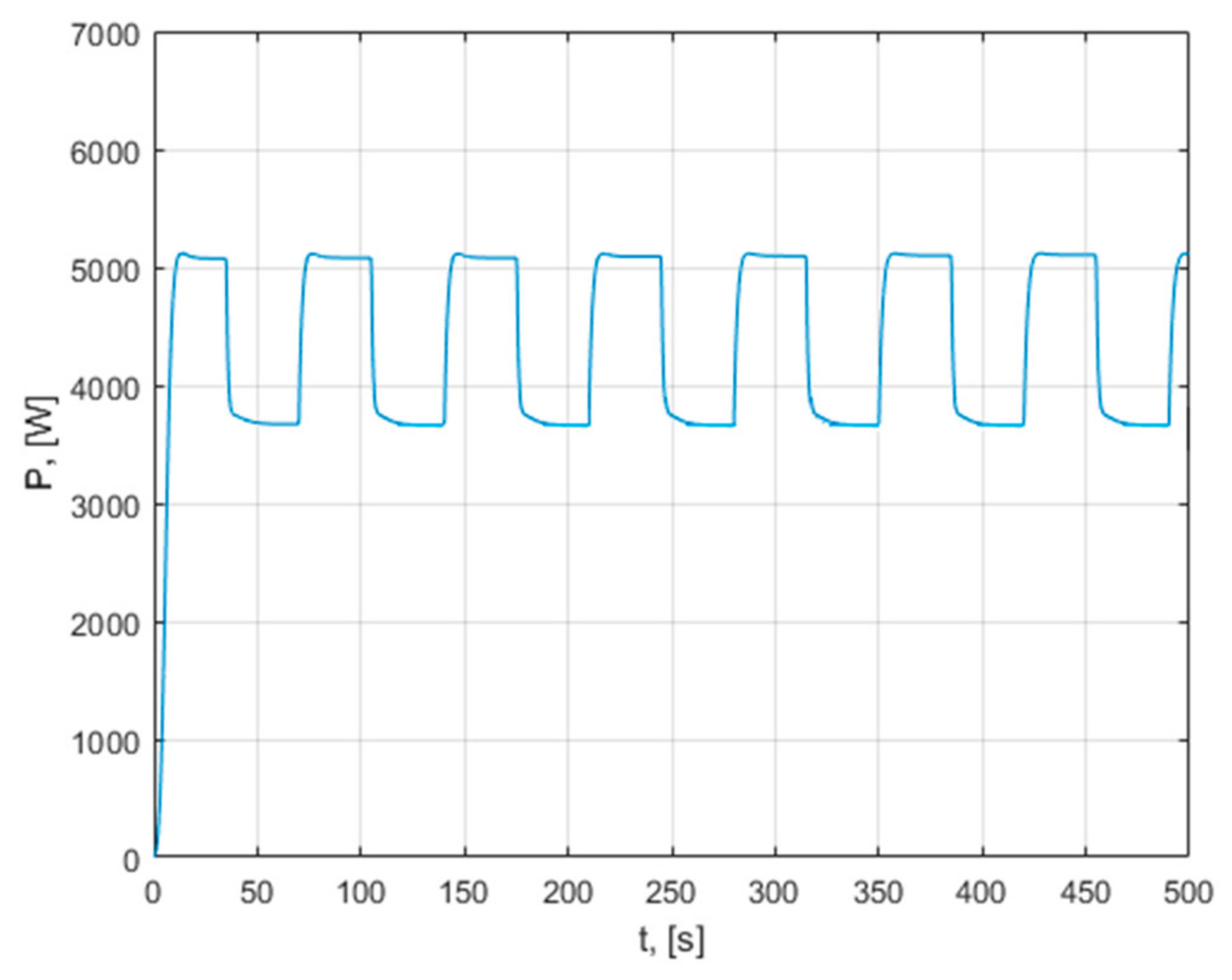
The control efficiency study is based on the following performance criterion, which is the energy generated by the system:
where
P is the developed mechanical power,
tf is the duration of the process analysis, and
W is the developed mechanical energy. The electric generator has an efficiency that is maximum at rated power and decreases as the rotational speed decreases. The criterion has the measure unit (kWh), as well the energy. The control performance is better when the value of the criterion, in the same functioning conditions, is higher.
5. Discussion
The results and their interpretation from the perspective of this study and the working hypotheses are further discussed.
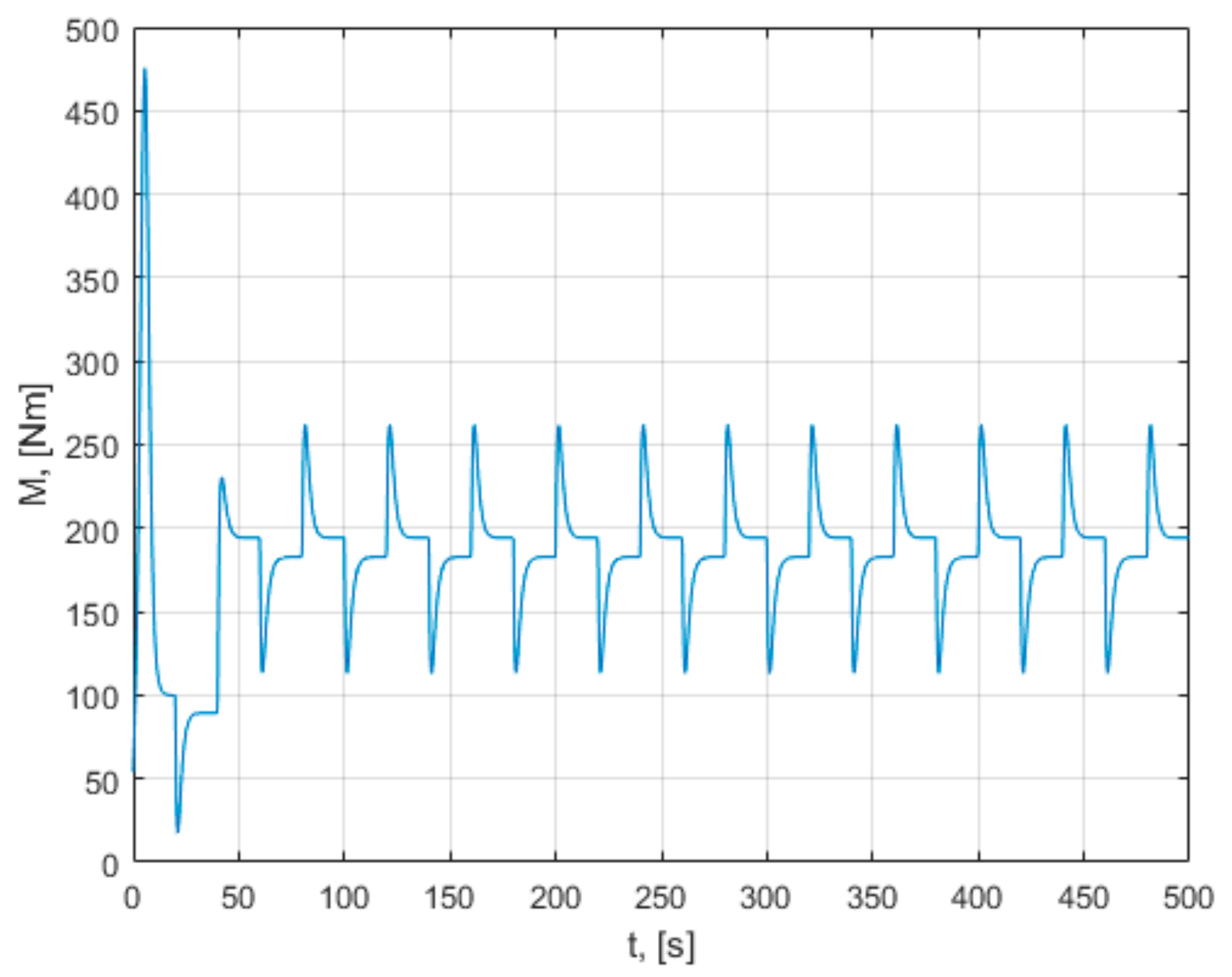
The characteristics obtained in a dynamic regime for an unfavorable operation case, in which a constant, low value of the load torque is considered, are presented in
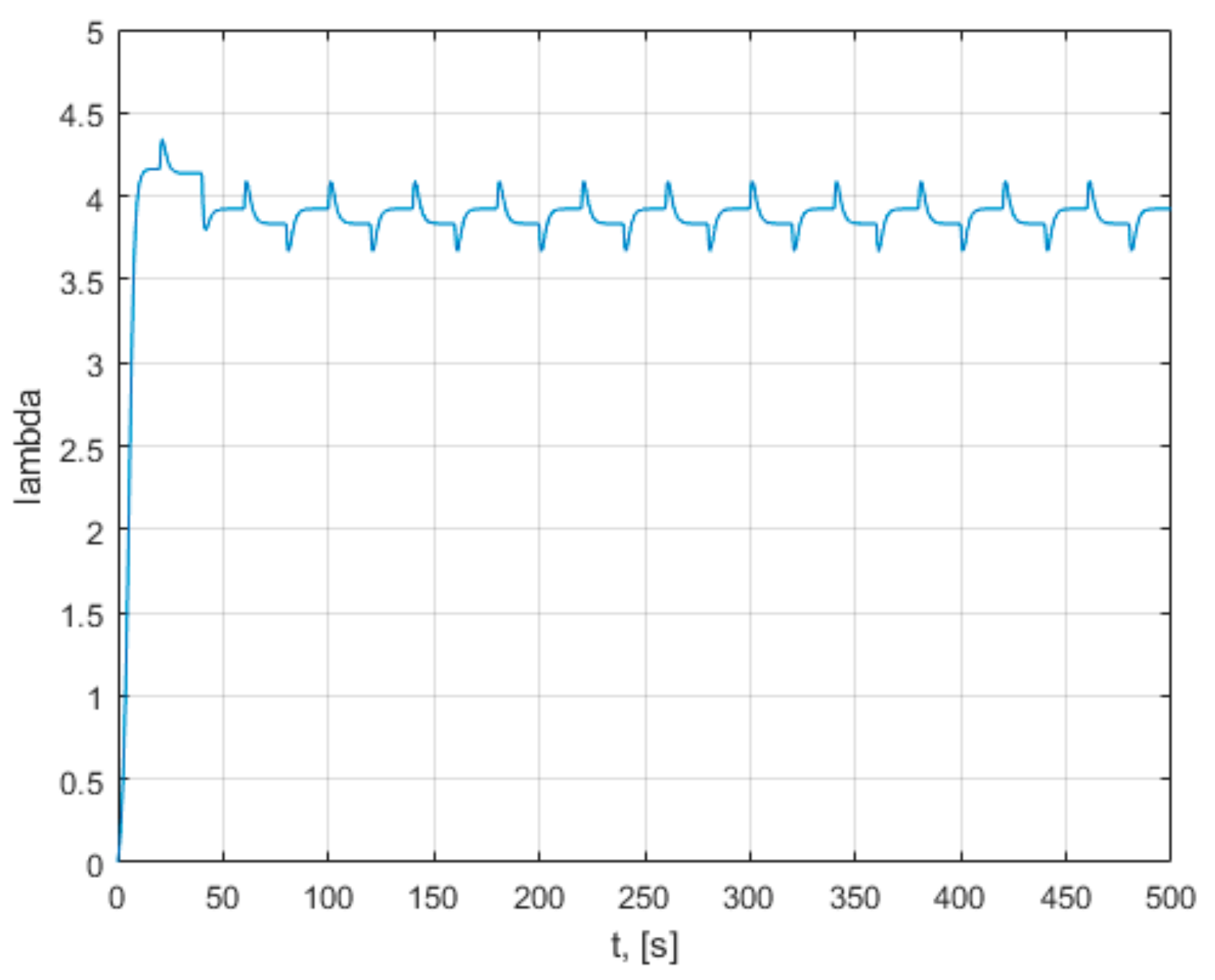
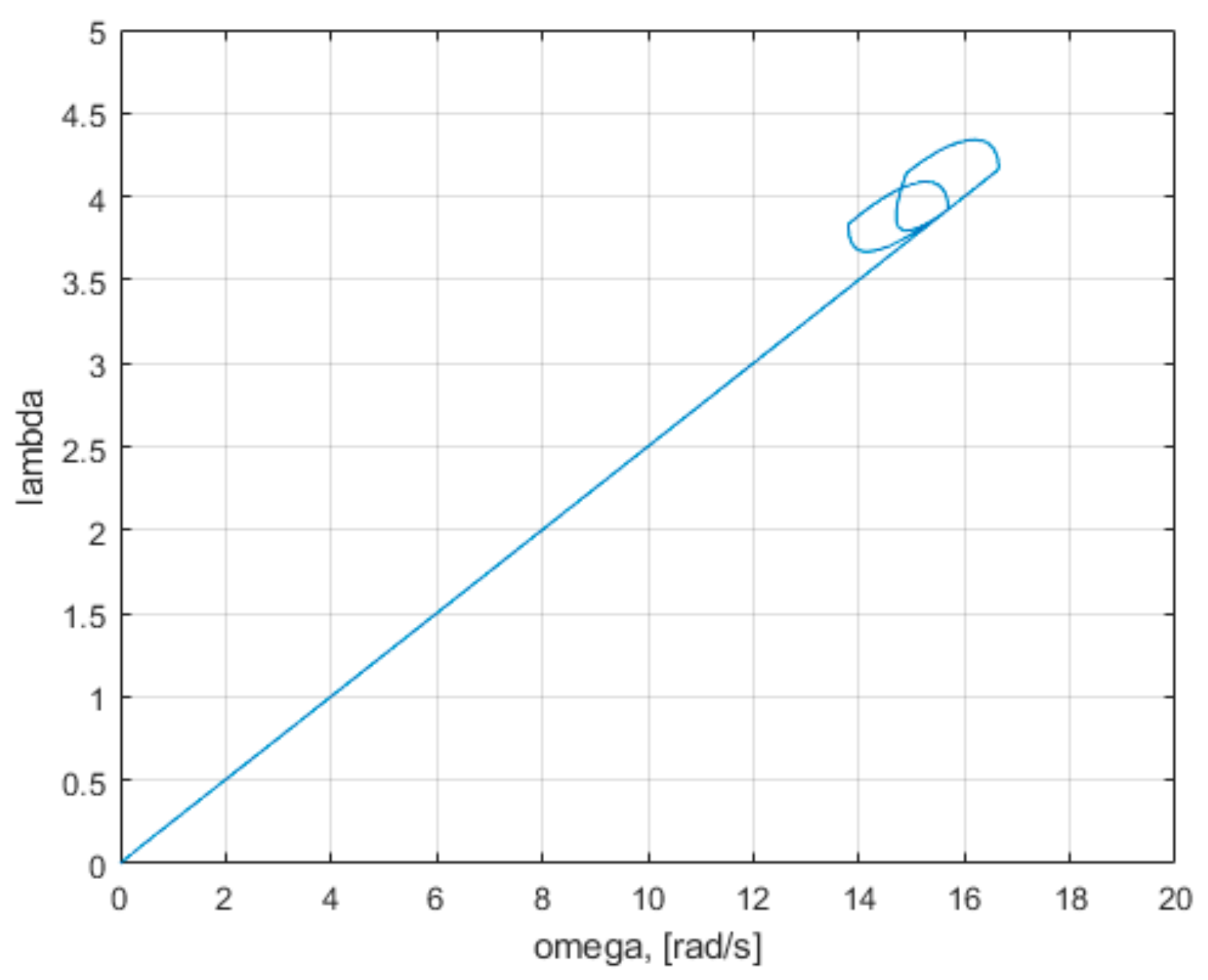
Appendix A. Those characteristics demonstrate that the turbine model behaves according to the presented relations. It is observed that the turbine variable values change with the change in wind speed and load torque. From the presented graphs, it is observed that the operating point of the turbine passes from one characteristic of the speed to another, together with the change in the wind speed and the change in the load torque. This simulation demonstrates that changing the load torque can change the rotational speed, the power generated, and the operating point. If the load torque increases, the operating point tends to move to the maximum power points. The peaks that appear on the characteristics of the variables are due to the sudden changes in the velocity v, which intervene in the calculations at the denominator of the relation of λ. In the condition in which the turbine operates at a low constant load torque, without being driven with maximum power point tracking, the installation reaches a steady state, with operating points far from the maximum power point. This makes it necessary to use methods of maximum power point tracking. The maximum co-ordinate power points (ω,
Pmax,) in the phase plane are unstable equilibrium points. The turbine has an infinite number of unstable equilibrium points. The main disadvantage of turbine control systems is due to this fact, namely, that it is desired that the operating points of the system be precisely these points of unstable equilibrium. The tendency of the system in the equilibrium point is important. The system does not return to the equilibrium point if a small initial condition offset is used or it is moved away from the equilibrium point.
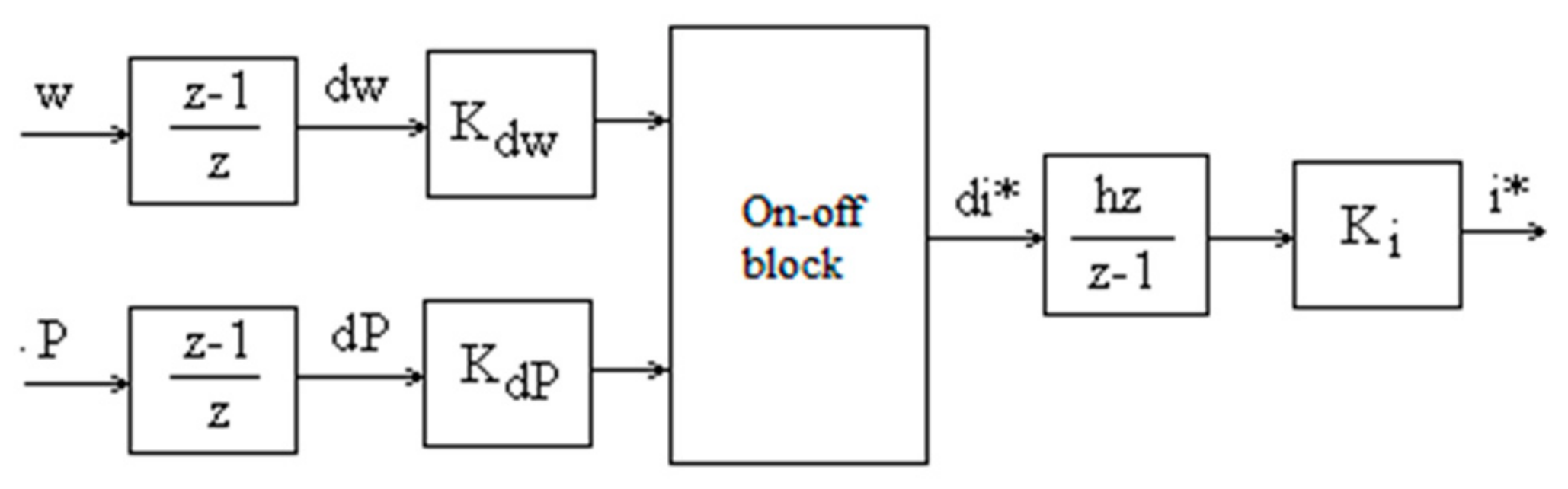
A set of nine maximum power point tracking rules has been developed and implemented in the control methods. The control rules for tracking the maximum power point were developed based on a human reasoning, taking into account the physical phenomenon that occurs in the installation: the dynamics of the rotational movement of the turbine shaft and electromagnetic phenomena that occur in the electric generator.
The maximum power point tracking rules have been adapted for on–off control and for fuzzy control in a numerical manner.
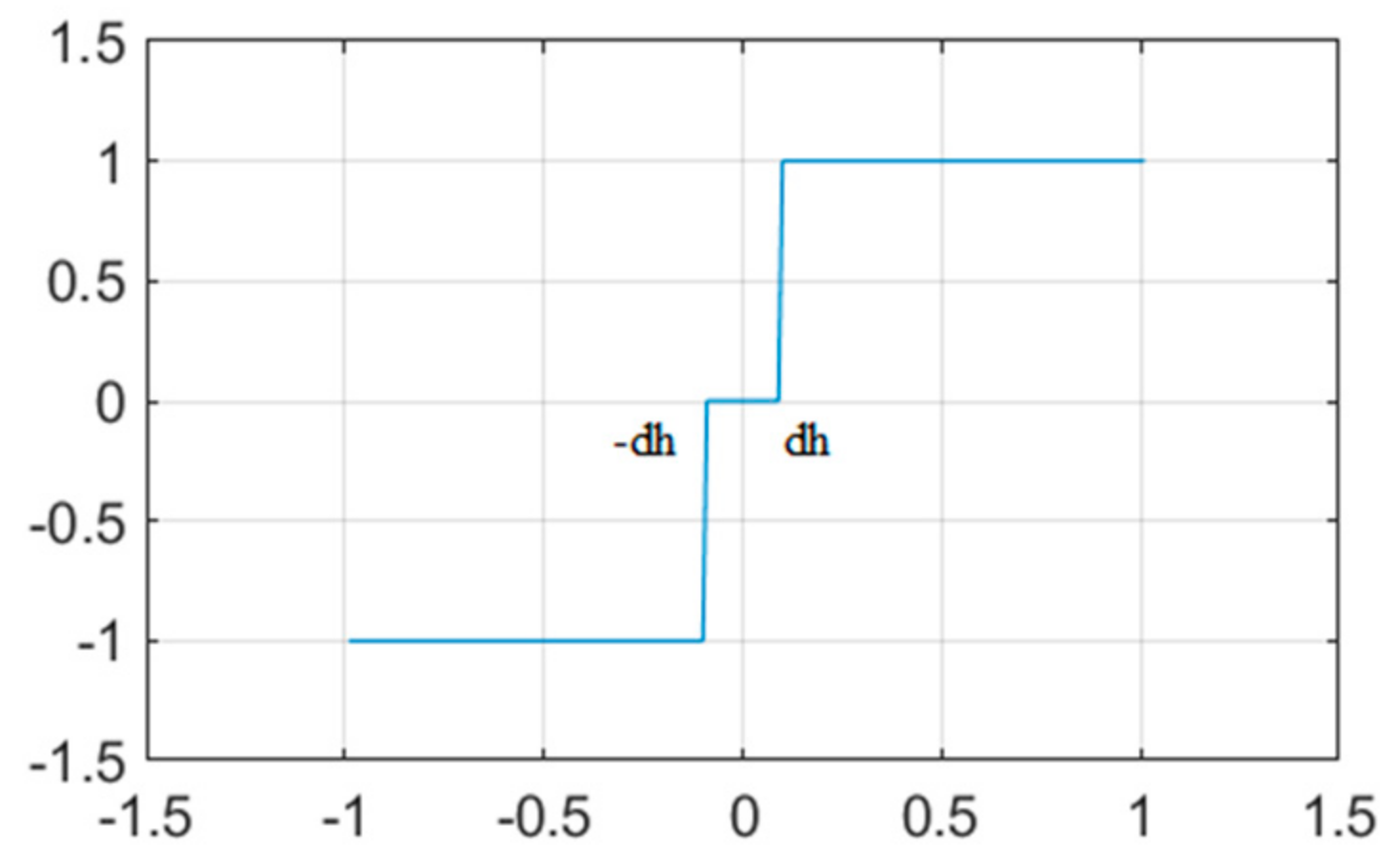
The developed maximum power point tracking rules lead the turbine on various state trajectories closer to the maximum power point. The maximum power point tracking rules suit on–off driving with dead band, which has only three states.
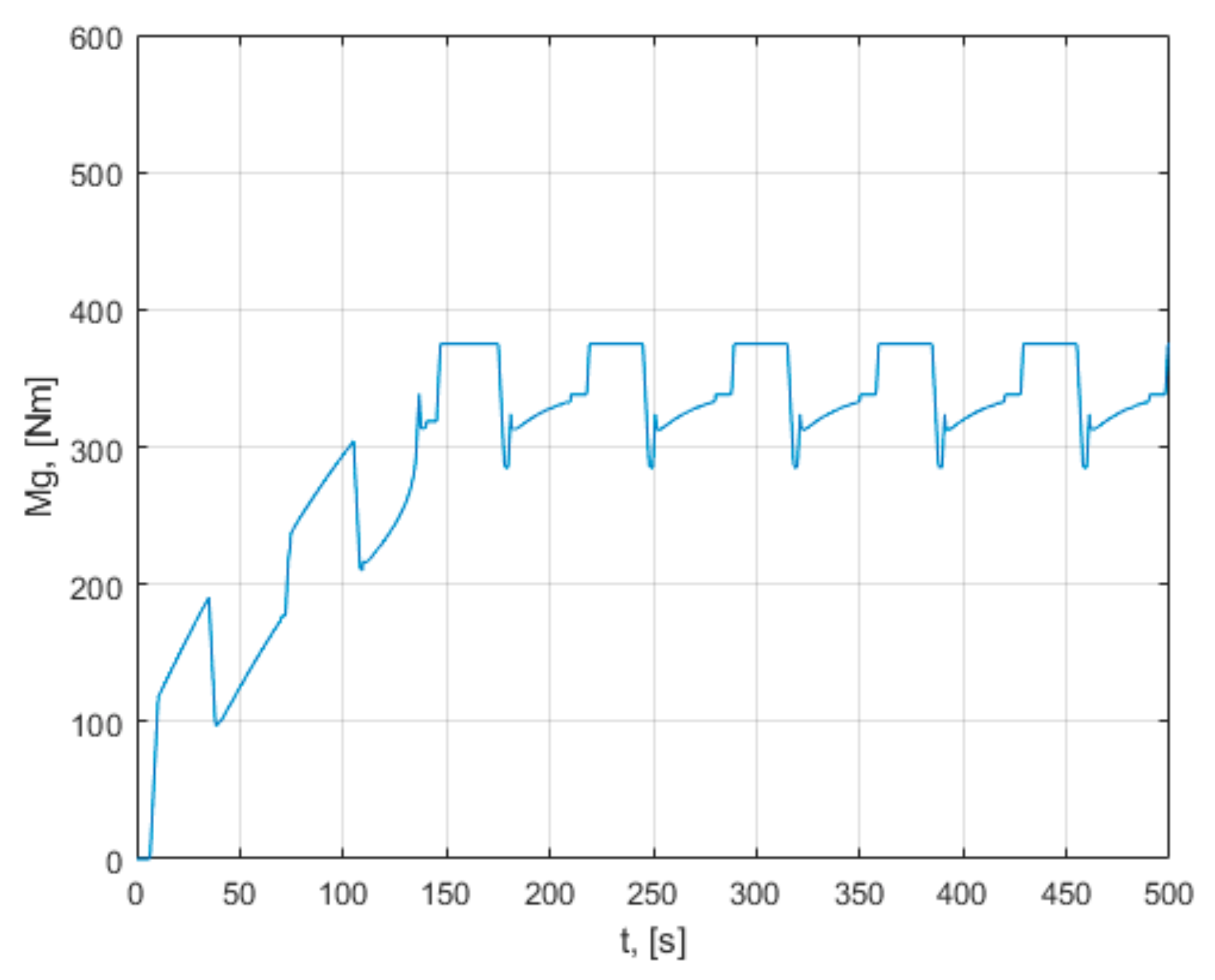
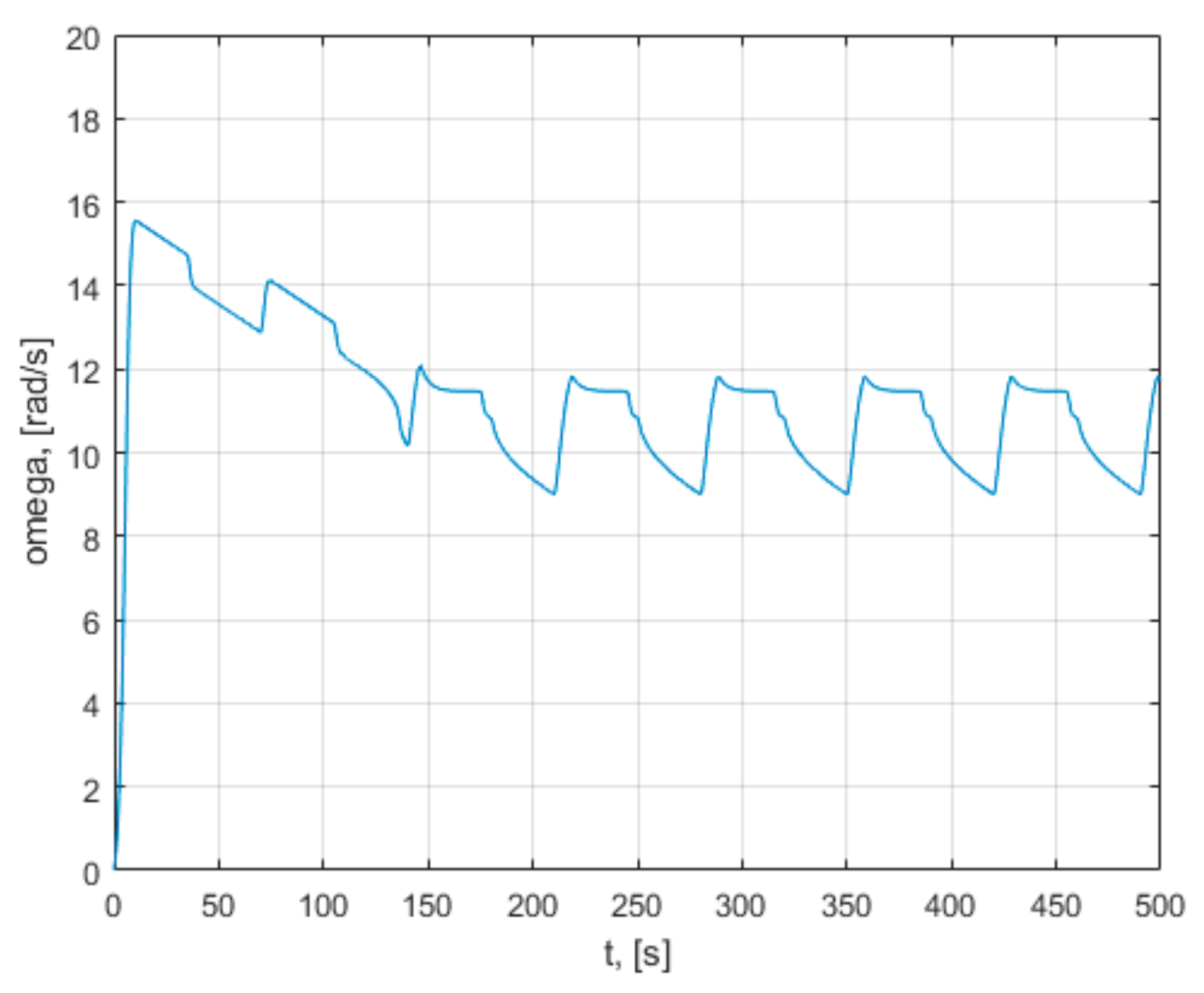
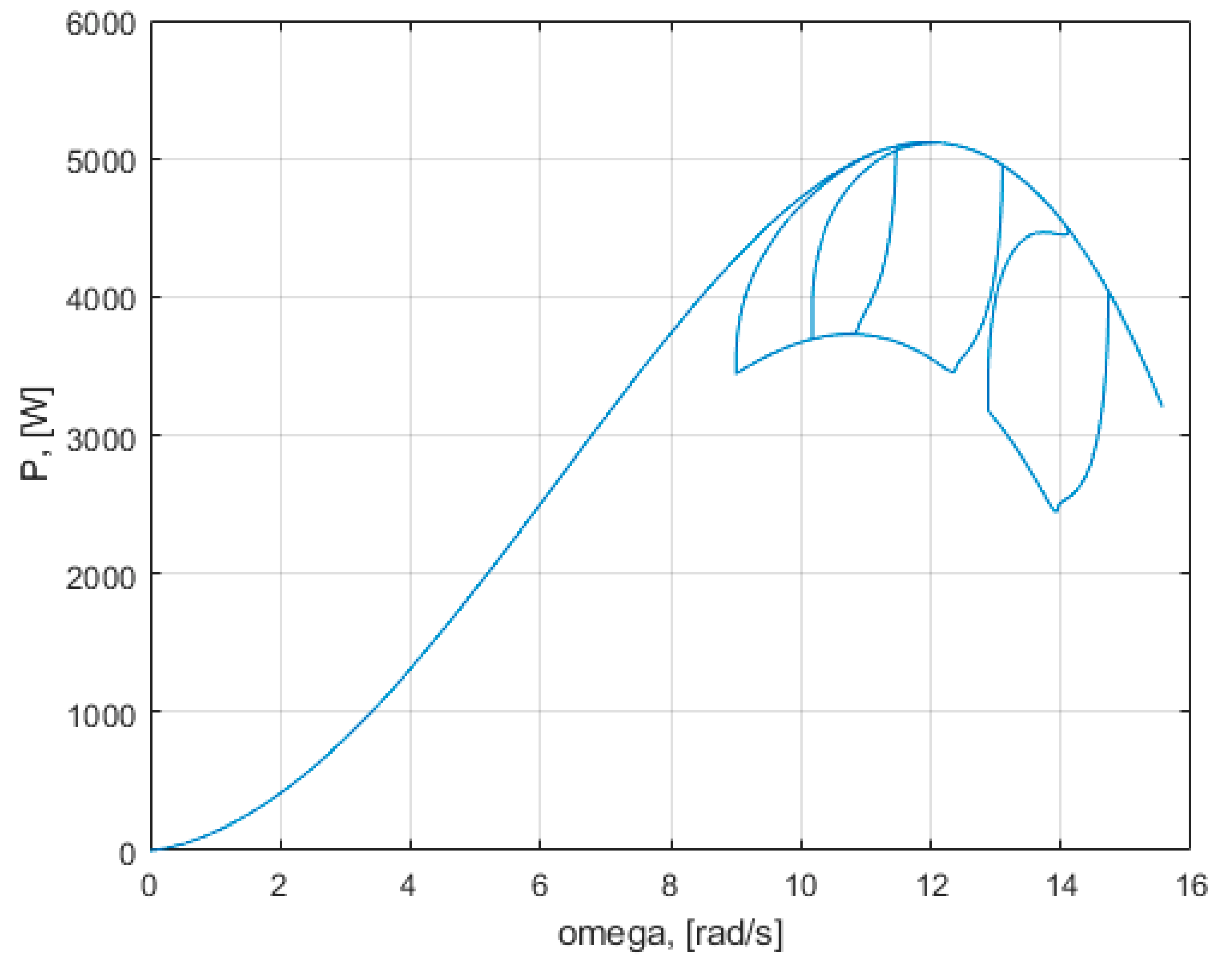
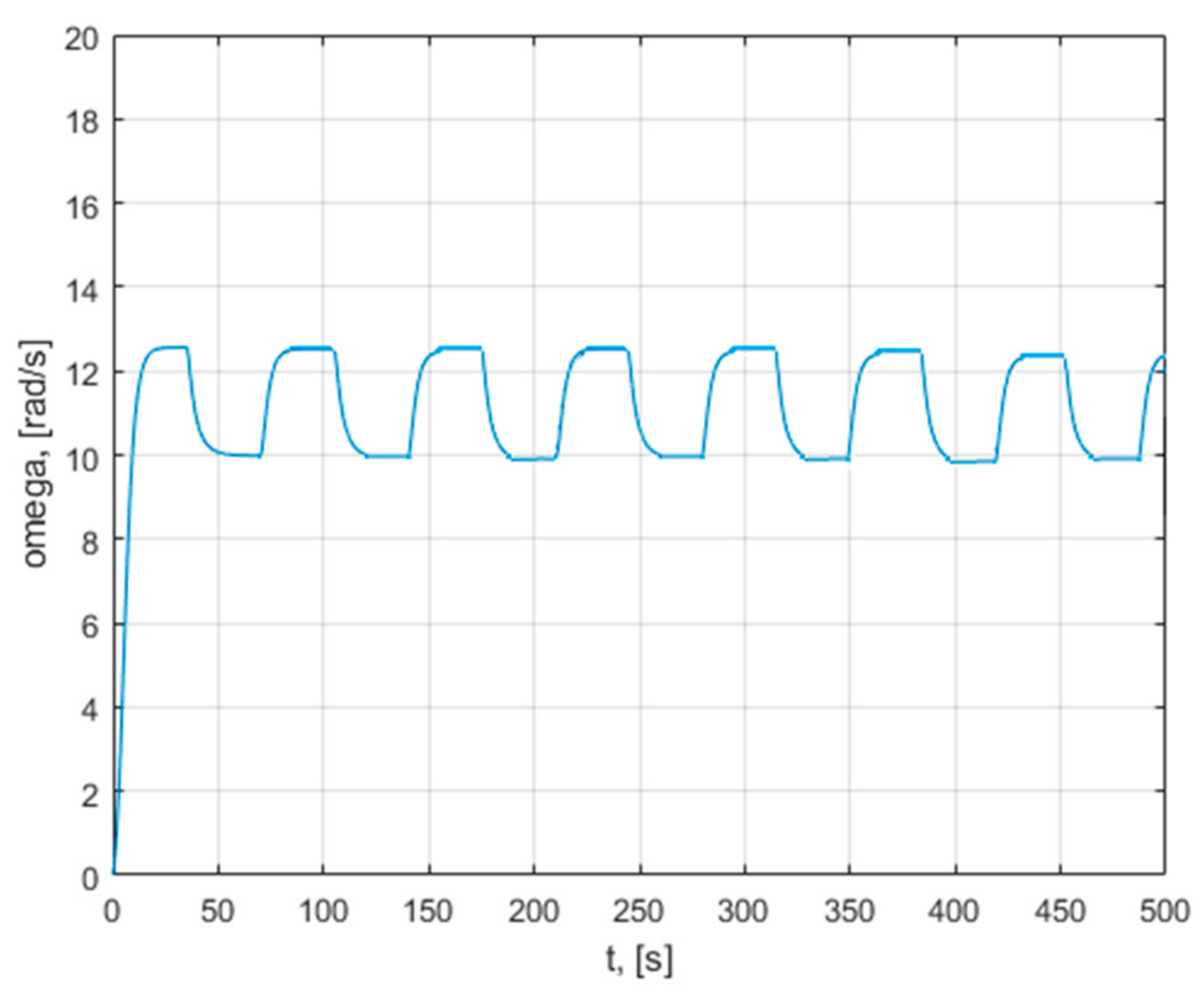
The variables at the controller inputs have continuous values over time. The variable at the output of the regulator is in the form of a three-state pulse train. In the case of on–off control, in the first phase, in a transient state, the trajectories are further away from the optimal trajectory. The transient state lasts longer than in the case of the other two methods. It is observed that, in steady state, the operating point approaches the maximum. The operating point moves between the characteristics of 9 and 10 m/s.
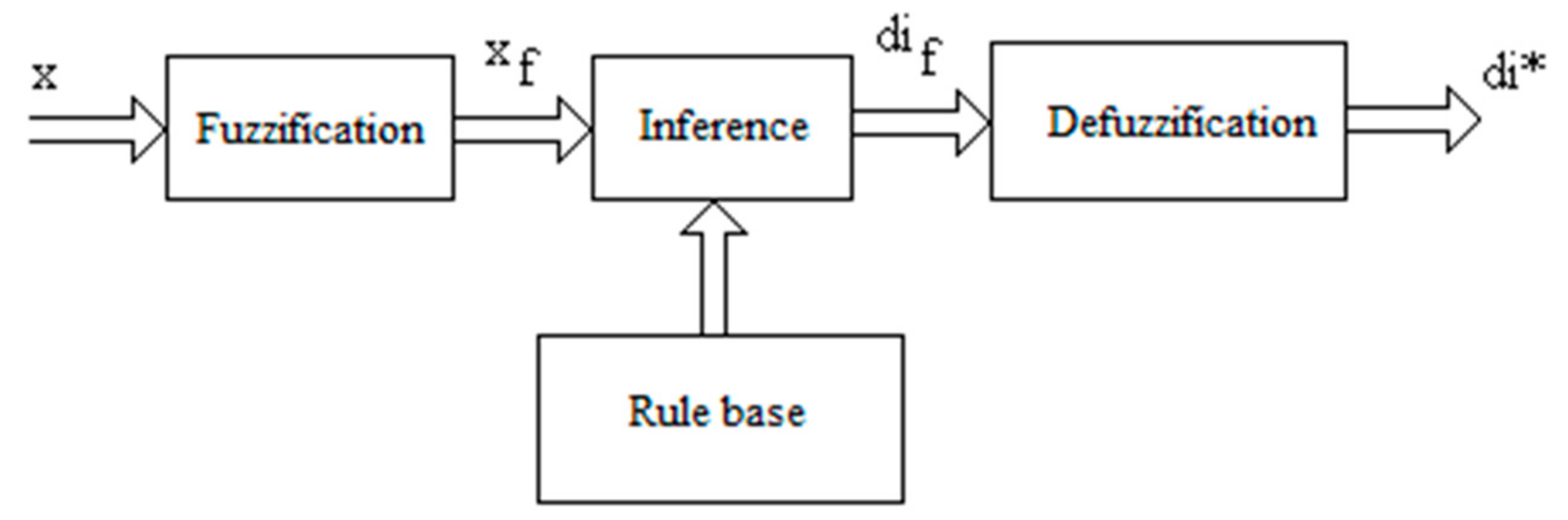
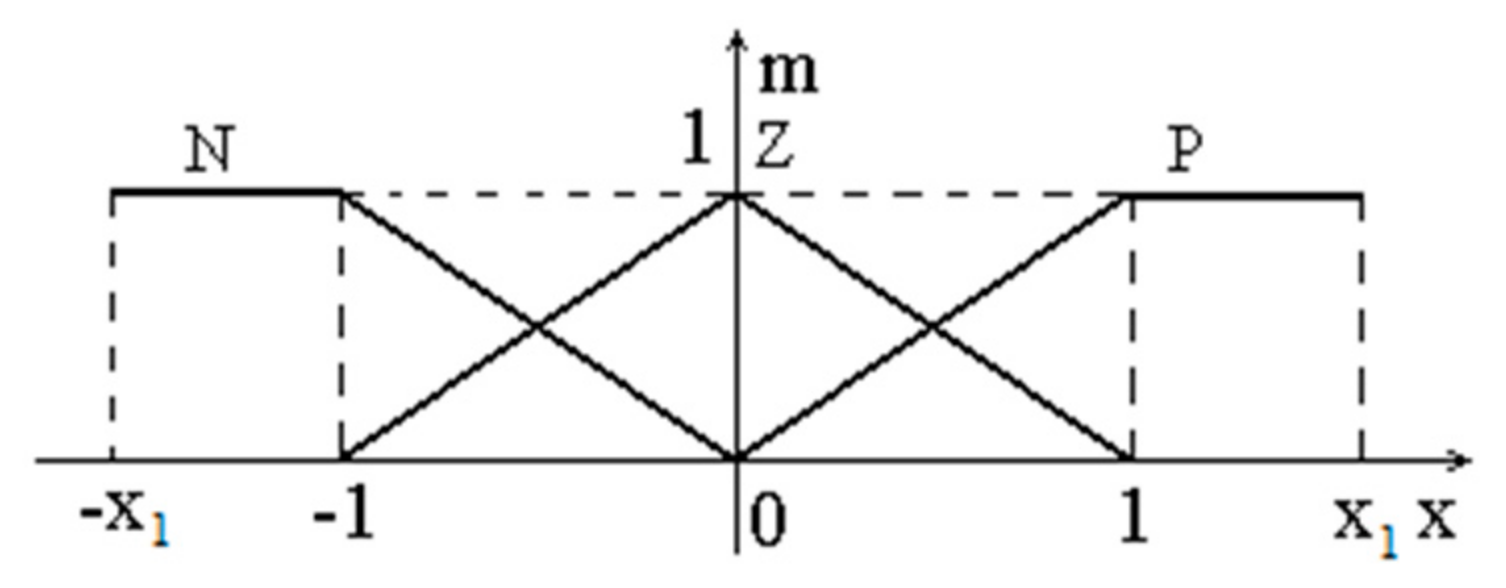
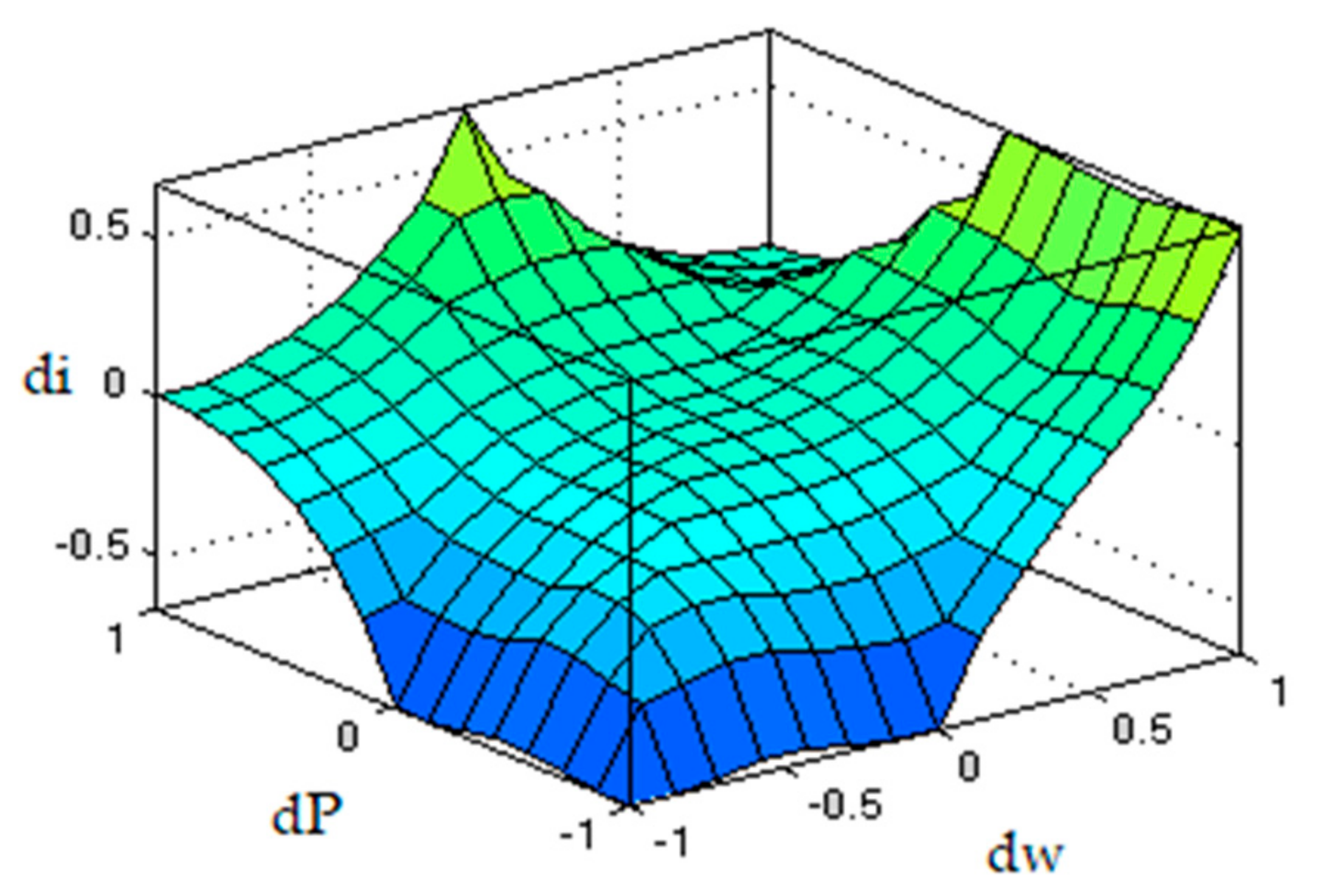
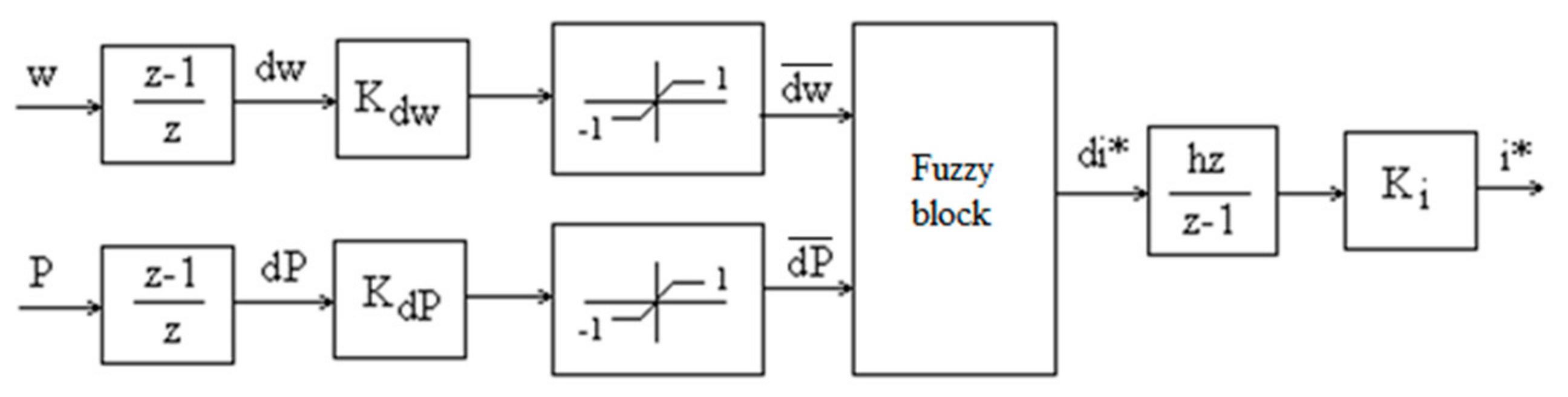
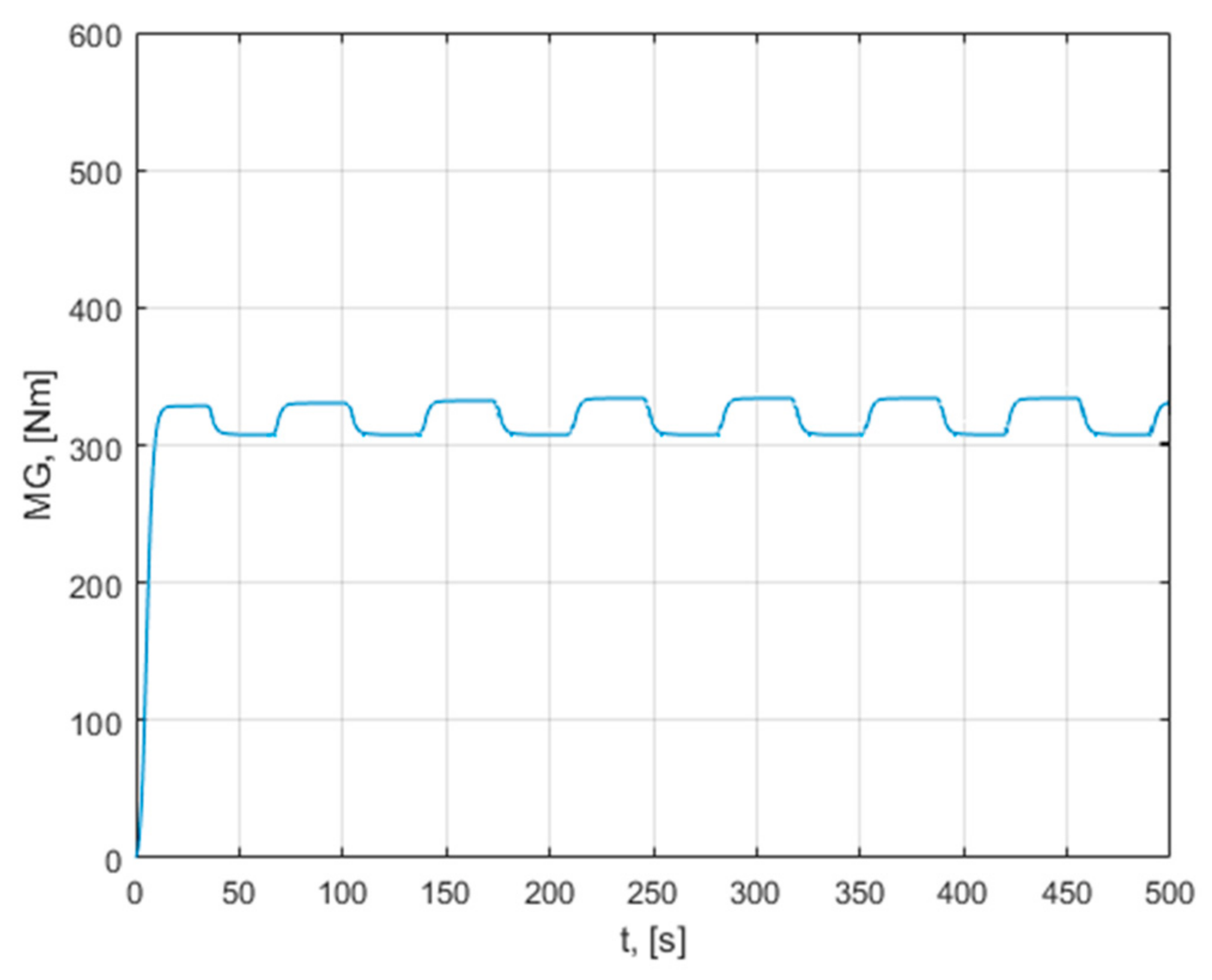
In this case, the behavior of the control system depends on the choice of the amplification coefficient of current reference. A block with Mamdani’s structure was used in the fuzzy controller. A base with nine rules was used, identical to the rules of the tracking method. Three fuzzy variables were used for each variable of the regulator, with three membership functions, triangular and trapezoidal. This structure gives the most nonlinear character of the fuzzy controller.
Unlike on–off control, fuzzy logic ensures interpolation between rules. In addition, in the case of fuzzy control, the state trajectories are closer to the ideal trajectory of the search for the maximum power point.
In the case of fuzzy regulation, a shorter transient regime was obtained following repeated simulation tests.
The operating point moves from the 10 m/s characteristic to the 9 m/s characteristic on the state trajectories close to the maximum power trajectory. The control system reaches the same points after the change in wind speed, close to the maximum point.
In this case, the choice of amplification coefficients of the fuzzy controller must be made carefully.
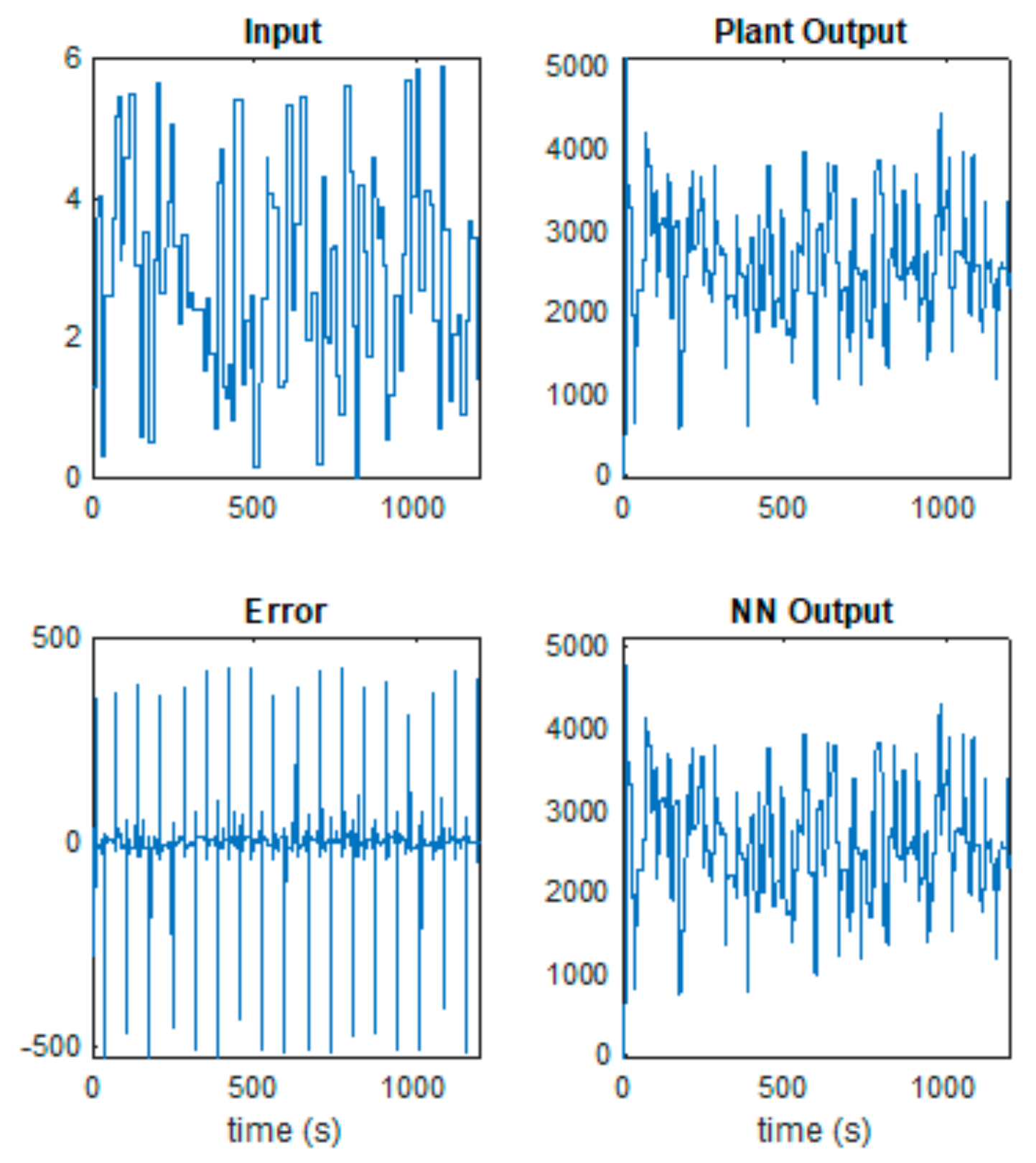
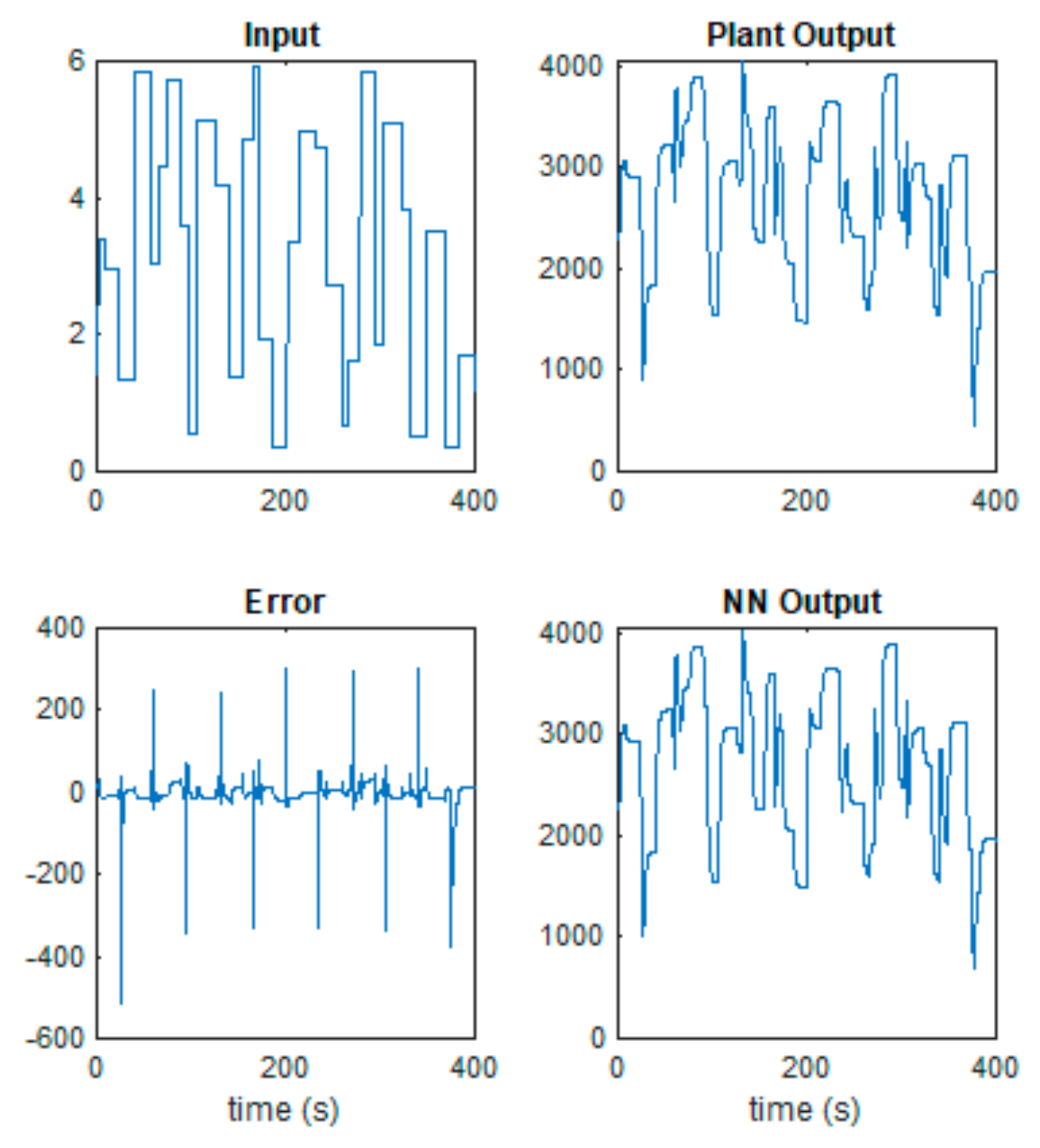
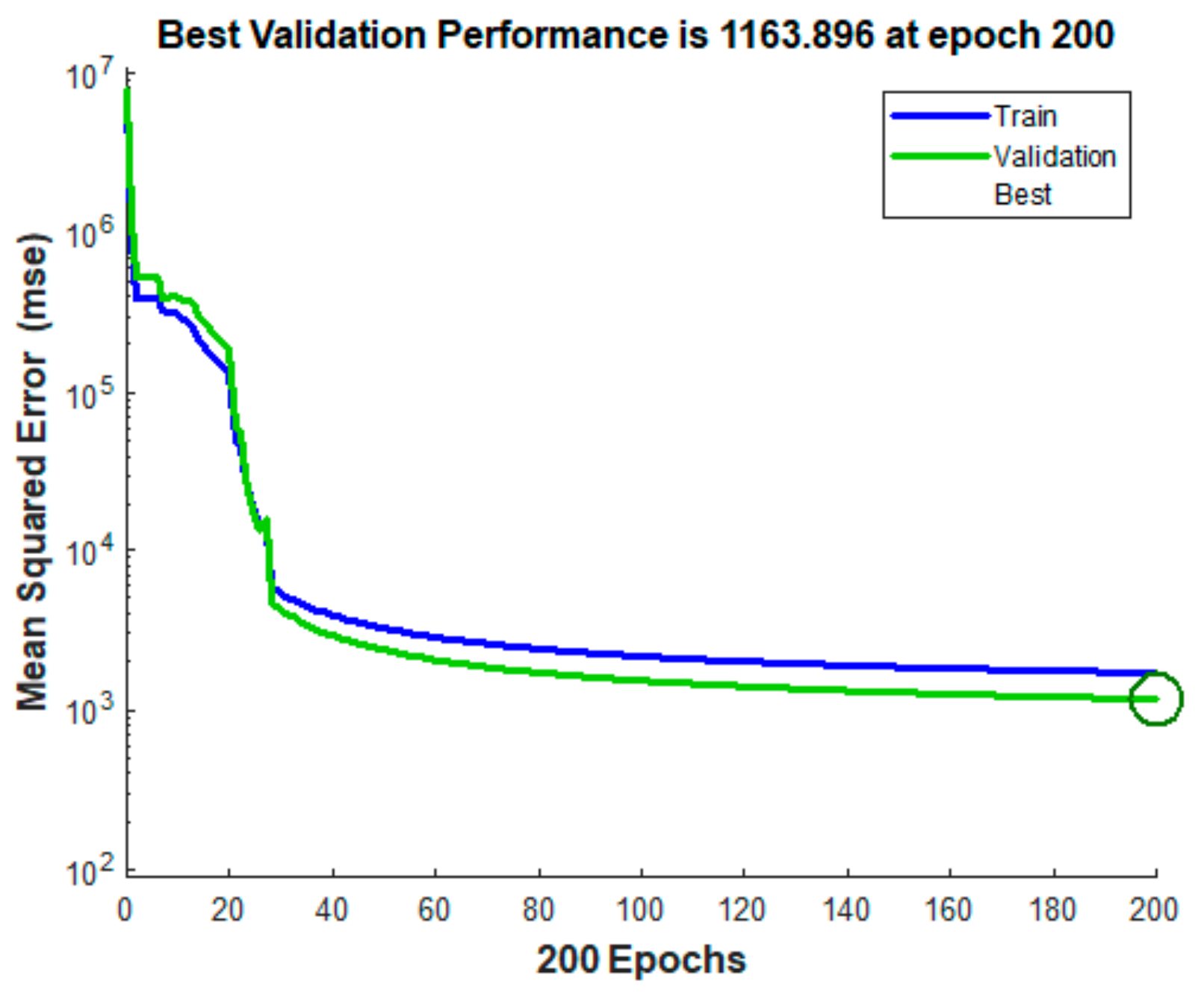
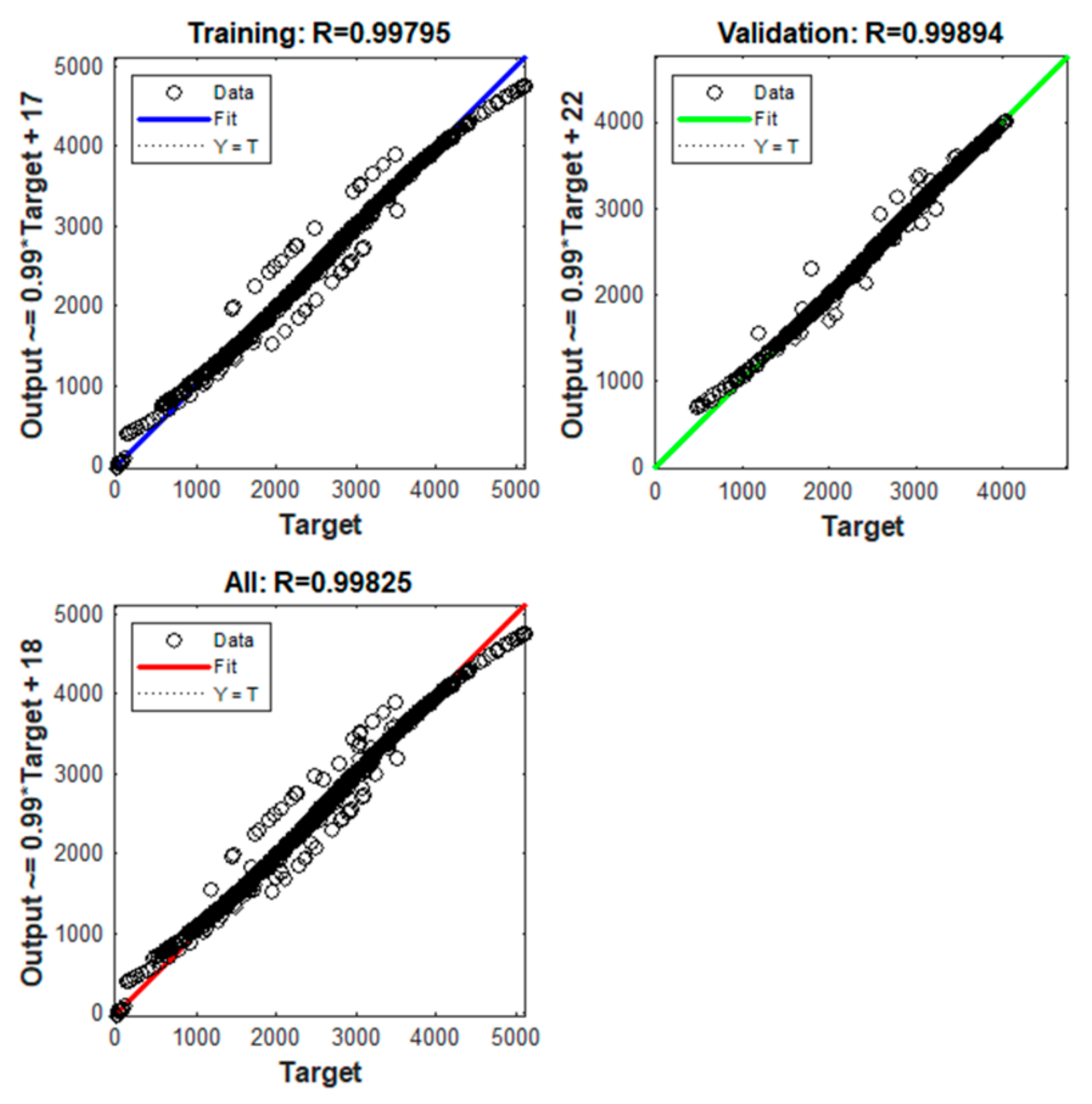
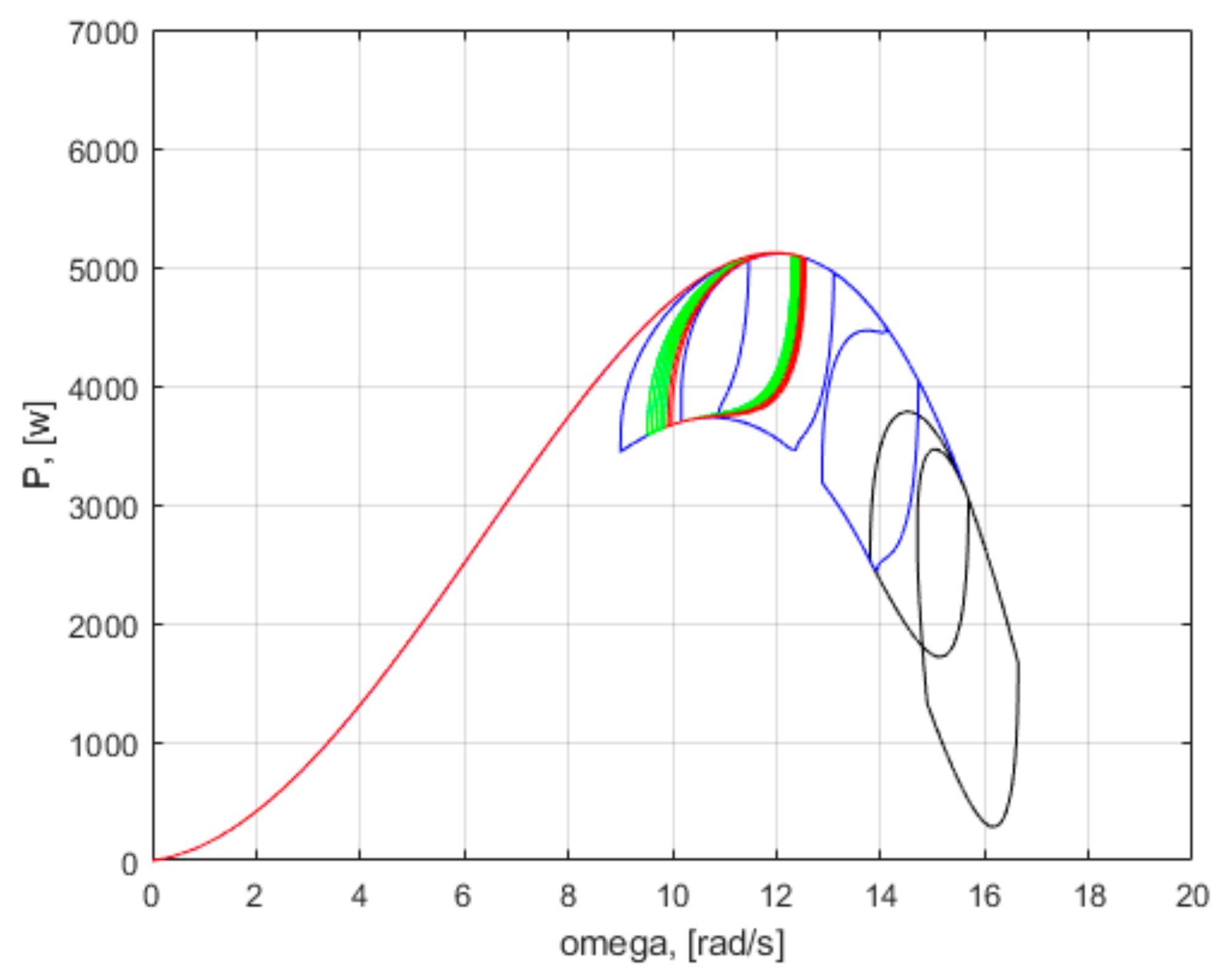
A fuzzy block with Sugeno’s structure, and other forms of membership functions, may also be tested as a future direction of research. It is recommended to test fuzzy controllers with more rules, more fuzzy variables, and more membership functions. For example, with five fuzzy values, such as: negative big, negative small, zero, positive small, positive big. This regulator could more precisely capture particular parts of the maximum power point tracking. However, it will lose the nonlinearity of the regulation, which is the main characteristic of the fuzzy controller. The use of deep learning techniques allows the identification of the wind turbine with a neural network model and the introduction of a neural predictive control method. The identification can be done offline using data taken from the wind turbine. The process of training the neural networks used as a model and as a regulator is a complex process, requiring several phases and a long computation time. This process requires significant computing resources, both a high computational speed and a high computational memory. The amplitudes of the uniformly distributed random signal must be chosen in the maximum value range of the system variables. The Levenberg–Marquardt neural training method ensures a small mean squared error is obtained after a shorter training time than in the case of other methods. It does not get stuck in local minima. In the presented example, a structure with the lowest value of mean squared error was chosen. From the simulations, it results that the presented solution has a longer duration of the transient state than in the case of fuzzy regulation. It is observed that the generated power follows the prescribed power with a certain error, and the state trajectories are around the optimal trajectory. A better identification of the process and a better dimensioning of the prediction law could be tried. Other neural network structures with different numbers of layers and neurons can be tested as a future direction of research. Different trainings lead to different structures of the neural network and to different values of weights and biases.
Analyzing the characteristics (ω, P), it is observed that, in the first part of the transient state, all the control methods bring the operating point on the same characteristic for the same wind speed.
One of the main findings is that the energy generated increases significantly in cases that follow the maximum power point, up to 60%, compared to the case of operating at a low and constant load torque and without maximum power point tracking, as can be seen in
Table 4.
A second finding is that the differences between the energies generated at the various analyzed methods of maximum power point tracking are small, as can be seen in
Table 4. The maximum difference is 5%, compared to the fuzzy control. In addition, between neural control and on–off control, the difference is not more than 0.7%. If there are discrepancies in the amplification coefficients in practice, the characteristics may deteriorate. It must also be taken into account that efficiency of the electric generator is higher at the rated speed and decreases when the speed decreases.
Because the implementation of control techniques is numerical, the choice of the sampling period and the methods of numerical approximation of derivation and integration must be made appropriately with the dynamics of the process. The transient state is longer, as in the case of on–off control, due to the method, but also due to the amplification coefficients of the regulator and the sampling mode.





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}