
Robust Stabilization and Observer-Based Stabilization for a Class of Singularly Perturbed Bilinear Systems


{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Problem Formulation and Design Procedure
2.1. Nonlinear State Feedback
2.2. Observer and Observer-Based State Feedback
- (i)
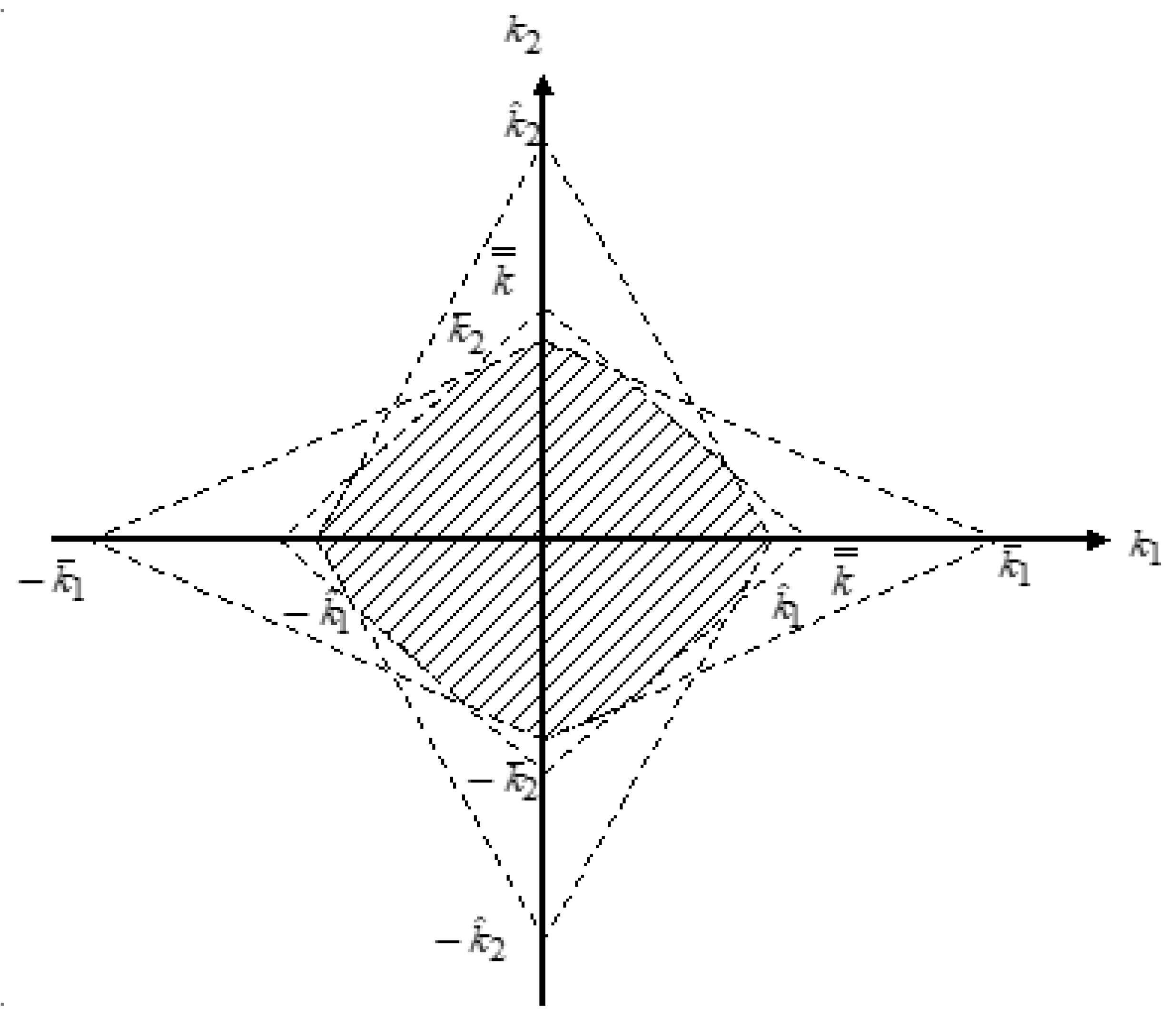
- The stability of the system’s state Equation (11).In fact, this result is the same as Theorem 1, i.e., if are selected inside the region of the convex polygon as shown in Figure 1, then can be guaranteed to be stable.
- (ii)
- The stability of the error Equation (11).
- (i)
- The stability of the system’s state Equation (11).In fact, the inequalities (16) can be obtained from Theorem 1. The results guarantee that is stable.
- (ii)
- The stability of the error Equation (11).
3. Example
- (I)
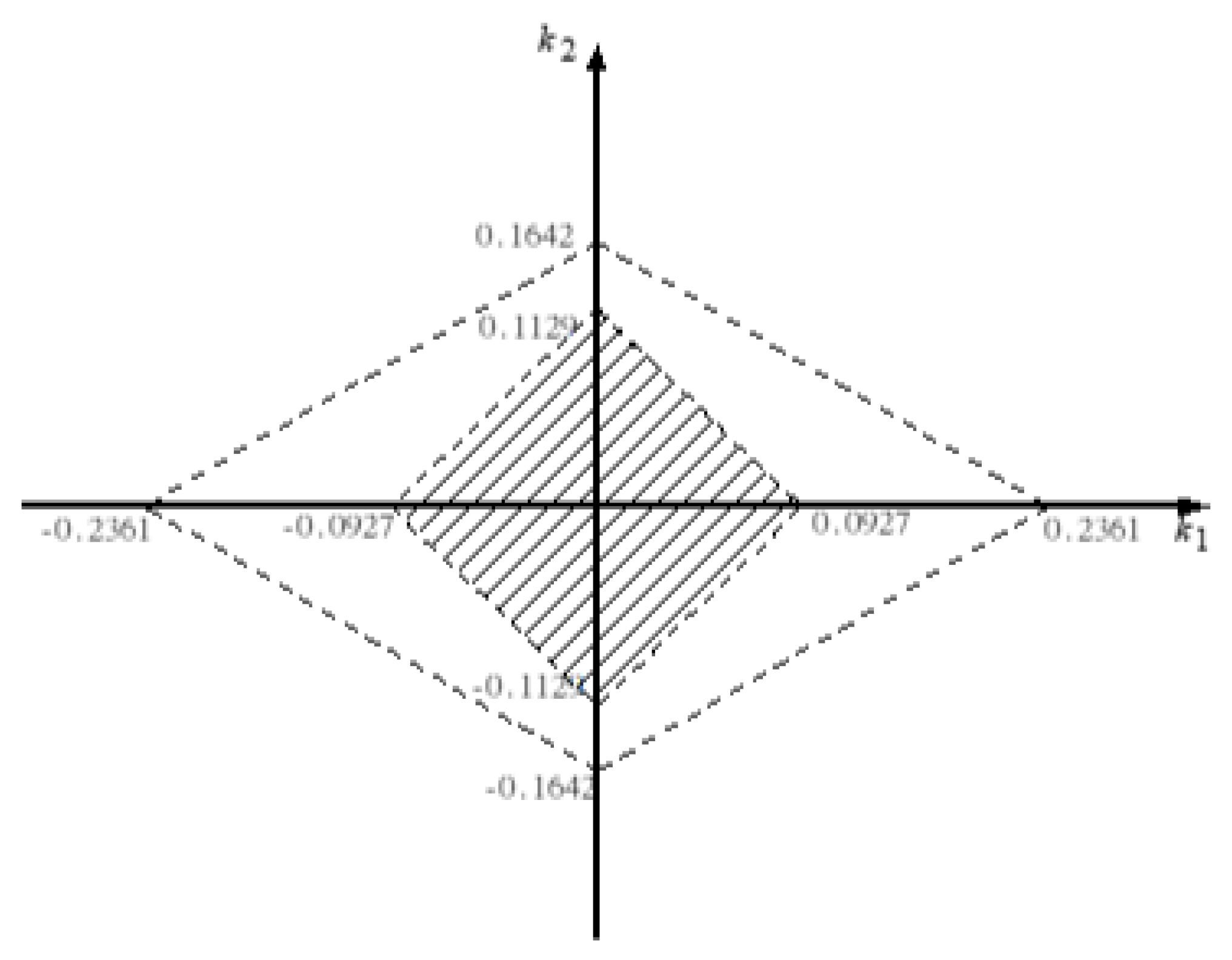
- First, by Theorem 1, let k1 = 0.05, k2 = 0.05, and choose such that is stable, from the Lyapunov Equation (13), we can obtain and . The inequality (14) can be held according to the above parameters, hence, an observer equation can be represented as below:Therefore, we conclude that system (17) can be stabilized by the following feedback control law for all ε∈(0, ∞);
- (II)
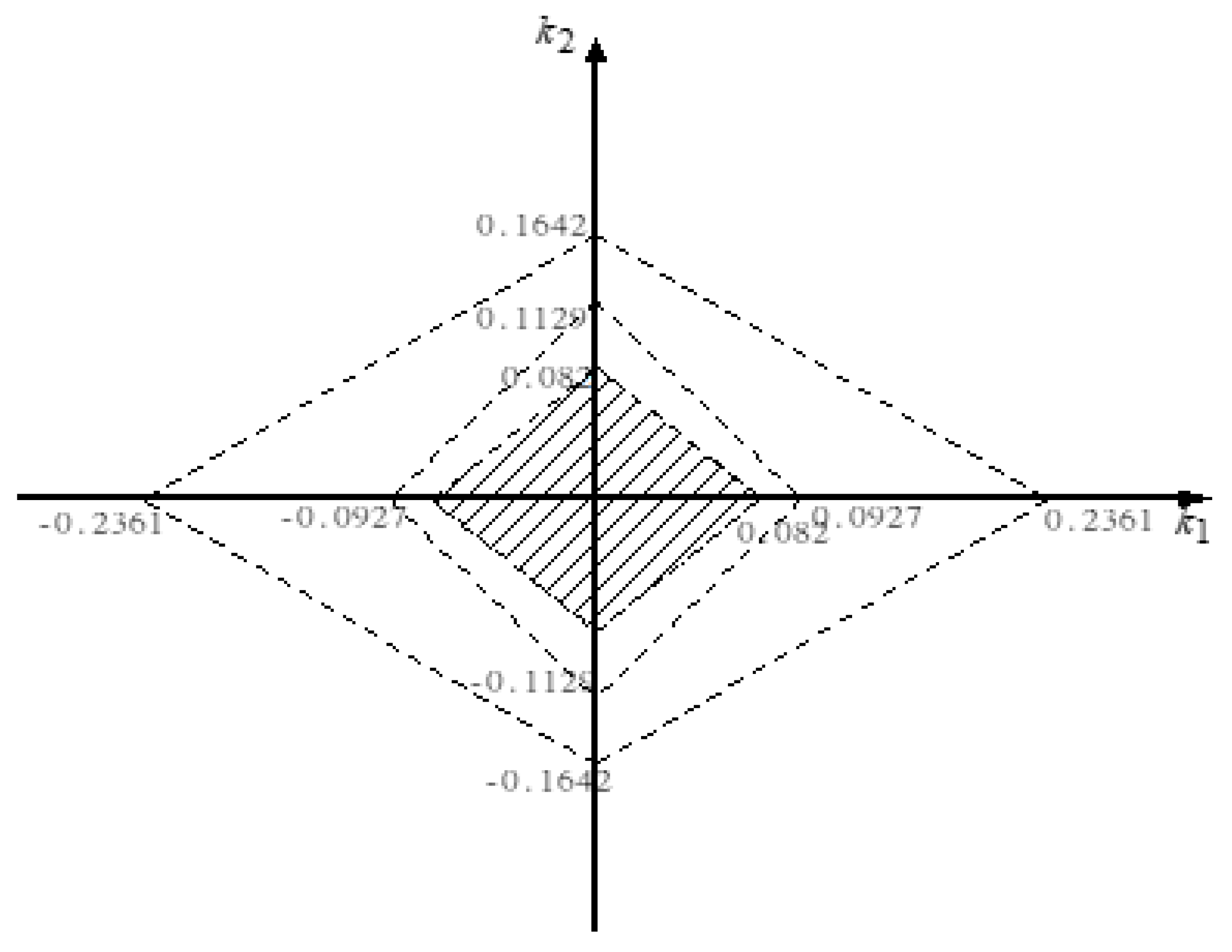
- First, we can choose such that is stable, and matrices can be also obtained. Hence, an observer of the system (17) for all ε∈(0, ∞) can be represented as below:Second, according to Theorem 3, the six intersections, and can be calculated from (16). Therefore, we conclude that system (17) can be stabilized by the following feedback control law for all ε∈(0, ∞):where are selected inside the admissible region of the convex polygon, as shown in Figure 4.
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Mohler, R.R. Nonlinear Systems, Vol. II, Applications to Bilinear Control; Prentice Hall: Englewood Cliffs, NJ, USA, 1991. [Google Scholar]
- Wang, W.-J.; Chiou, J.-S. A non-linear control design for the discrete-time multi-input bilinear systems. Mechatronics 1991, 1, 87–94. [Google Scholar] [CrossRef]
- Benesty, J.; Paleologu, C.; Dogariu, L.-M.; Ciochină, S. Identification of Linear and Bilinear Systems: A Unified Study. Electronics 2021, 10, 1790. [Google Scholar] [CrossRef]
- Nie, Z.; Gao, F.; Yan, C.-B. A Multi-Timescale Bilinear Model for Optimization and Control of HVAC Systems with Consistency. Energies 2021, 14, 400. [Google Scholar] [CrossRef]
- Kokotovic, P.V.; Khalil, H.K.; O’Reilly, J. Singular Perturbation Methods in Control: Analysis and Design; Academic Press: London, UK, 1986. [Google Scholar]
- Naidu, D.S. Singular Perturbation Methodology in Control Systems; IEE and Perter Peregrinus: Stevenage Herts, UK, 1988. [Google Scholar]
- Chao, C.-T.; Chen, D.-H.; Chiou, J.-S. Stabilization and the Design of Switching Laws of a Class of Switched Singularly Perturbed Systems via the Composite Control. Mathematics 2021, 9, 1664. [Google Scholar] [CrossRef]
- Bobodzhanov, A.; Kalimbetov, B.; Safonov, V. Generalization of the Regularization Method to Singularly Perturbed Integro-Differential Systems of Equations with Rapidly Oscillating Inhomogeneity. Axioms 2021, 10, 40. [Google Scholar] [CrossRef]
- Liu, W.; Wang, Y.; Tian, Y. Feedback Stabilization for Discrete-Time Singularly Perturbed Systems via Limited Information with Data Packet Dropout. IEEE Access 2021, 9, 40585–40594. [Google Scholar] [CrossRef]
- Cerpa, E.; Prieur, C. Singular Perturbation Analysis of a Coupled System Involving the Wave Equation. IEEE Trans. Autom. Control 2020, 65, 4846–4853. [Google Scholar] [CrossRef]
- Song, J.; Niu, Y. Dynamic Event-Triggered Sliding Mode Control: Dealing with Slow Sampling Singularly Perturbed Systems. IEEE Trans. Circuits Syst. II Express Briefs 2020, 67, 1079–1083. [Google Scholar] [CrossRef]
- Dragan, V. On the Linear Quadratic Optimal Control for Systems Described by Singularly Perturbed Itô Differential Equations with Two Fast Time Scales. Axioms 2019, 8, 30. [Google Scholar] [CrossRef] [Green Version]
- Abdullazade, N.N.; Chechkin, G.A. Perturbation of the Steklov problem on a small part of the boundary. J. Math. Sci. 2014, 196, 441–450. [Google Scholar] [CrossRef]
- Borisov, D.I.; Cardone, G.; Checkhin, G.A.; Koroleva, Y.O. On elliptic operators with Steklov condition perturbed by Dirichlet condition on a small part of boundary. Calc. Var. Partial. Differ. Equ. 2021, 60, 1–44. [Google Scholar] [CrossRef]
- Chechkina, A.G. On singular perturbation of a Steklov-type problem with asymptotically degenerate spectrum. Dokl. Math. 2011, 84, 695–698. [Google Scholar] [CrossRef]
- Chechkina, A.G. Homogenization of spectral problems with singular perturbation of the Steklov condition. Izvestiya: Mathematics 2017, 81, 199–236. [Google Scholar] [CrossRef]
- Tzafestat, S.G.; Anagonostou, K.E. Stabilization of singularly perturbed strictly bilinear systems. IEEE Trans. Automat. Contr. 1984, 29, 943–946. [Google Scholar] [CrossRef]
- Asamoah, F.; Jamshidi, M. Stabilization of a class of singularly perturbed bilinear systems. Int. J. Contr. 1987, 46, 1589–1594. [Google Scholar] [CrossRef]
- Li, T.-H.S.; Sun, Y.-Y. Comments on: Stabilization of a class of singularly perturbed bilinear systems. Int. J. Contr. 1988, 48, 1357–1358. [Google Scholar] [CrossRef]
- Chiou, J.-S.; Kung, F.-C.; Li, T.-H.S. Robust stabilization of a class of singularly perturbed discrete bilinear systems. IEEE Trans. Automat. Contr. 2000, 45, 1187–1191. [Google Scholar] [CrossRef]
- Pan, S.-J.; Tsai, J.S.-H.; Pan, S.-T. Application of Genetic Algorithm on Observer-Based D-Stability Control for Discrete Multiple Time-Delay Singularly Perturbation Systems. Int. J. Innov. Comput. Inf. Control 2011, 7, 3345–3358. [Google Scholar]
- Zhou, K.; Khargonekar, P.P. Robust stabilization of linear systems with norm-bounded time-varying uncertainty. Sys. Control Lett. 1988, 10, 17–20. [Google Scholar] [CrossRef]
- Saydy, L. New stability/performance results for singularly perturbed system. Automatica 1996, 32, 807–818. [Google Scholar] [CrossRef]
- Longchamp, R. Controller design for bilinear systems. IEEE Trans. Automat. Control 1980, 25, 547–548. [Google Scholar] [CrossRef]
- Genesio, R.; Tesi, A. The output stabilization of SISO bilinear systems. IEEE Trans. Automat. Control 1988, 33, 950–952. [Google Scholar] [CrossRef]
- Benallou, A.; Mellichamp, D.A.; Seborg, D.E. Optimal stabilizing controllers for bilinear systems. Int. J. Control 1988, 48, 1487–1501. [Google Scholar] [CrossRef]
- Hara, S.; Fumta, K. Minimal order state observers for bilinear systems. Int. J. Control 1976, 24, 705–718. [Google Scholar] [CrossRef]
- Funahashi, Y. Stable state estimator for bilinear system. Int. J. Control 1979, 29, 181–188. [Google Scholar] [CrossRef]
- Derese, I.; Noldus, E.J. Existence of bilinear state observers for bilinear system. IEEE Trans. Automat. Control 1981, 26, 590–592. [Google Scholar] [CrossRef]
- Derse, I.; Stevens, P.; Noldus, E.J. Observers for bilinear systems with bounded input. Int. J. Syst. Sci. 1979, 10, 649–668. [Google Scholar] [CrossRef]

Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, D.-H.; Chao, C.-T.; Chiou, J.-S. Robust Stabilization and Observer-Based Stabilization for a Class of Singularly Perturbed Bilinear Systems. Mathematics 2021, 9, 2380. https://doi.org/10.3390/math9192380
Chen D-H, Chao C-T, Chiou J-S. Robust Stabilization and Observer-Based Stabilization for a Class of Singularly Perturbed Bilinear Systems. Mathematics. 2021; 9(19):2380. https://doi.org/10.3390/math9192380
Chicago/Turabian StyleChen, Ding-Horng, Chun-Tang Chao, and Juing-Shian Chiou. 2021. "Robust Stabilization and Observer-Based Stabilization for a Class of Singularly Perturbed Bilinear Systems" Mathematics 9, no. 19: 2380. https://doi.org/10.3390/math9192380
APA StyleChen, D.-H., Chao, C.-T., & Chiou, J.-S. (2021). Robust Stabilization and Observer-Based Stabilization for a Class of Singularly Perturbed Bilinear Systems. Mathematics, 9(19), 2380. https://doi.org/10.3390/math9192380