
Global Dynamics of an SEIR Model with the Age of Infection and Vaccination

Abstract
:1. Introduction
- (i)
- is Lipschitz continuous on with the Lipschitz coefficient .
- (ii)
- .
- (iii)
- We denote , and as the essential supremums of , and , respectively.
- (i)
- , .
- (ii)
- or if and only if .
- (iii)
- and .
2. Preliminaries
2.1. Positivity and Boundedness of Solutions
- (a)
- Ω is positively invariant for Φ, i.e., for all ;
- (b)
- Φ is point dissipative, and Ω attracts all points in .
- (i)
- is bounded;
- (ii)
- is eventually bounded on C.
2.2. Asymptotic Smoothness
- (1)
- ;
- (2)
- There exists such that has compact closure for each .
- (i)
- ;
- (ii)
- uniformly in ;
- (iii)
- uniformly in ;
- (iv)
- uniformly in .
3. Steady States and Their Local Stability
3.1. Steady States and the Basic Reproduction Number
3.2. Local Stability
4. Global Stability
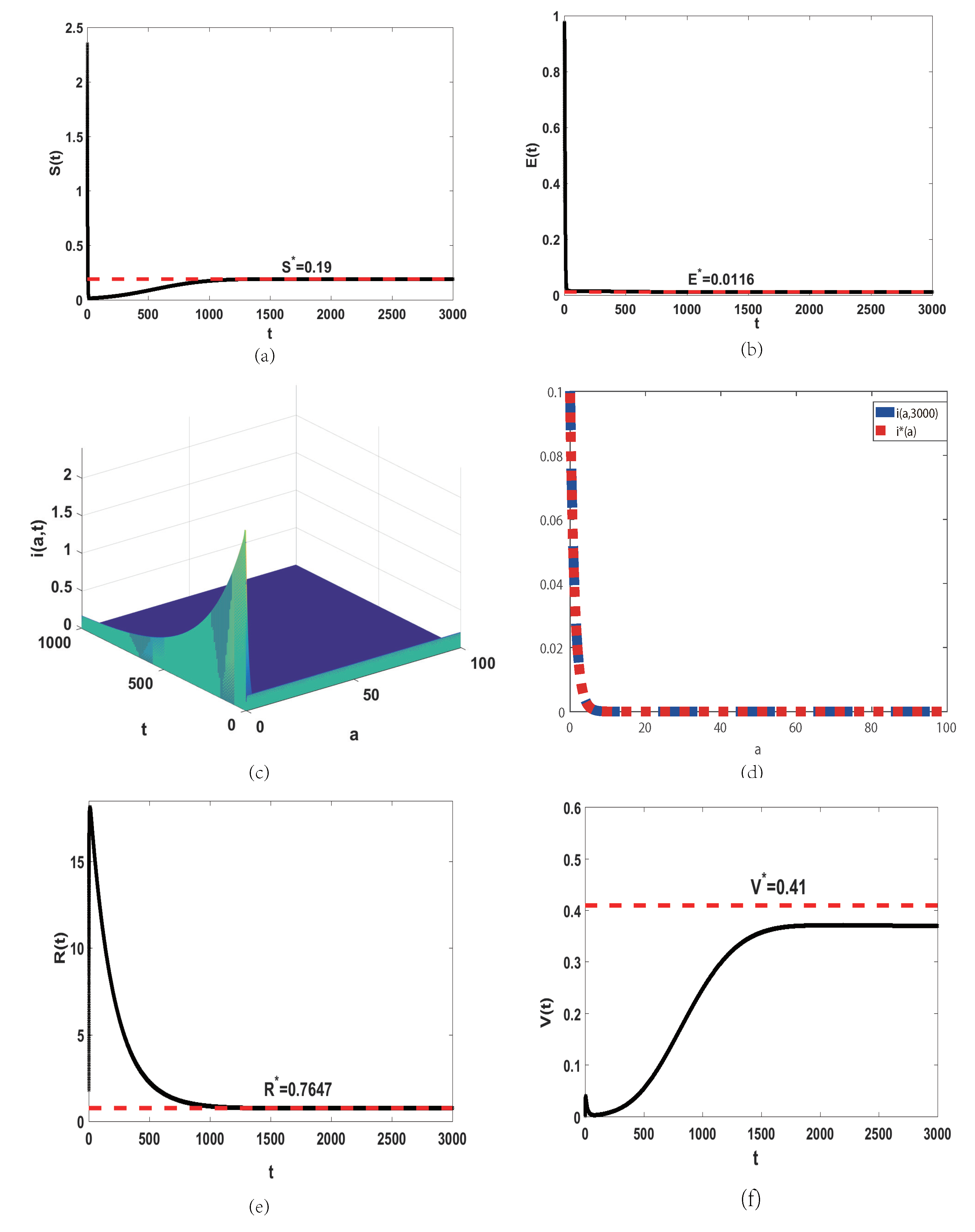
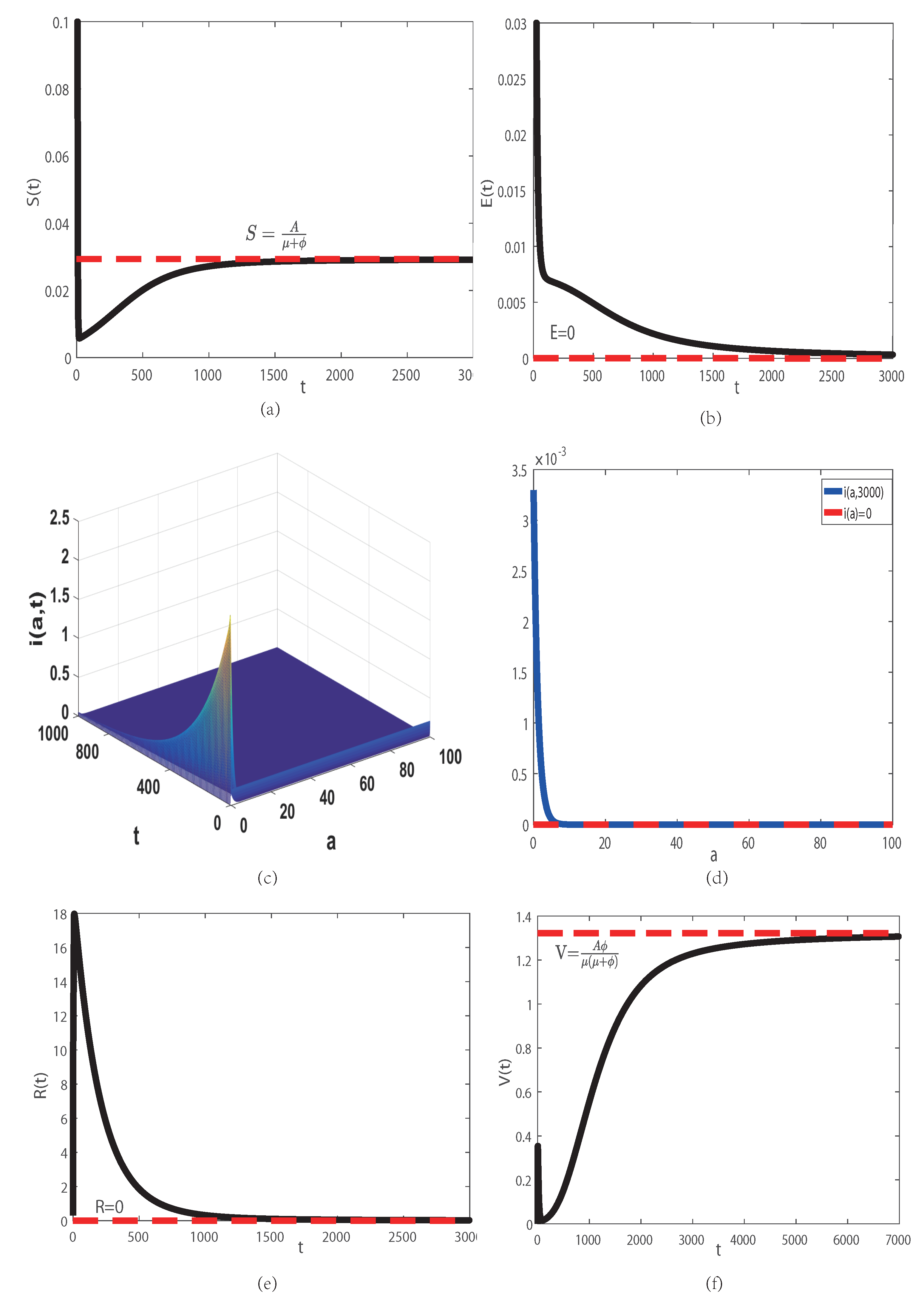
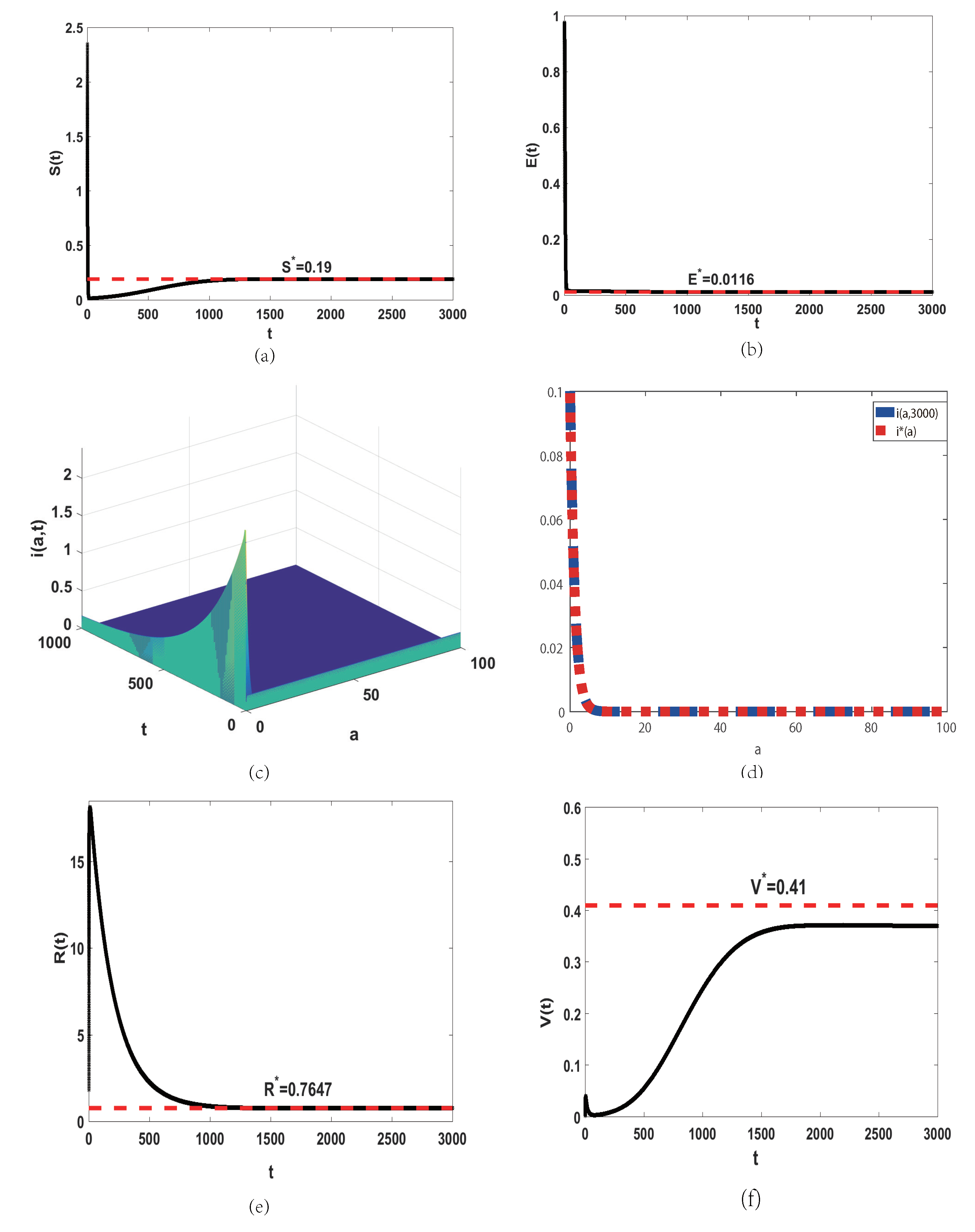
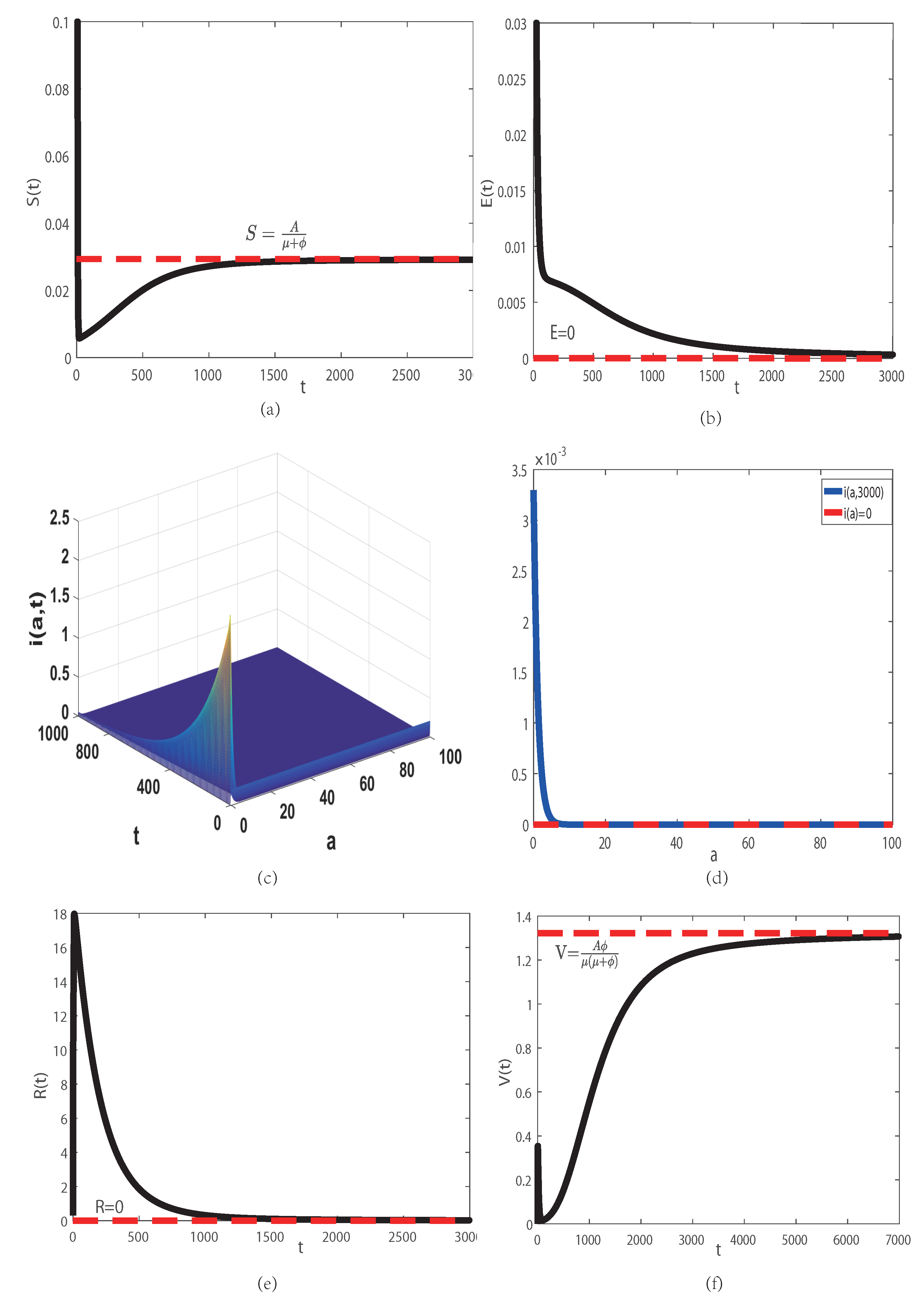
5. Numerical Simulations
- (i)
- An example when
- (ii)
- An example when
- (iii)
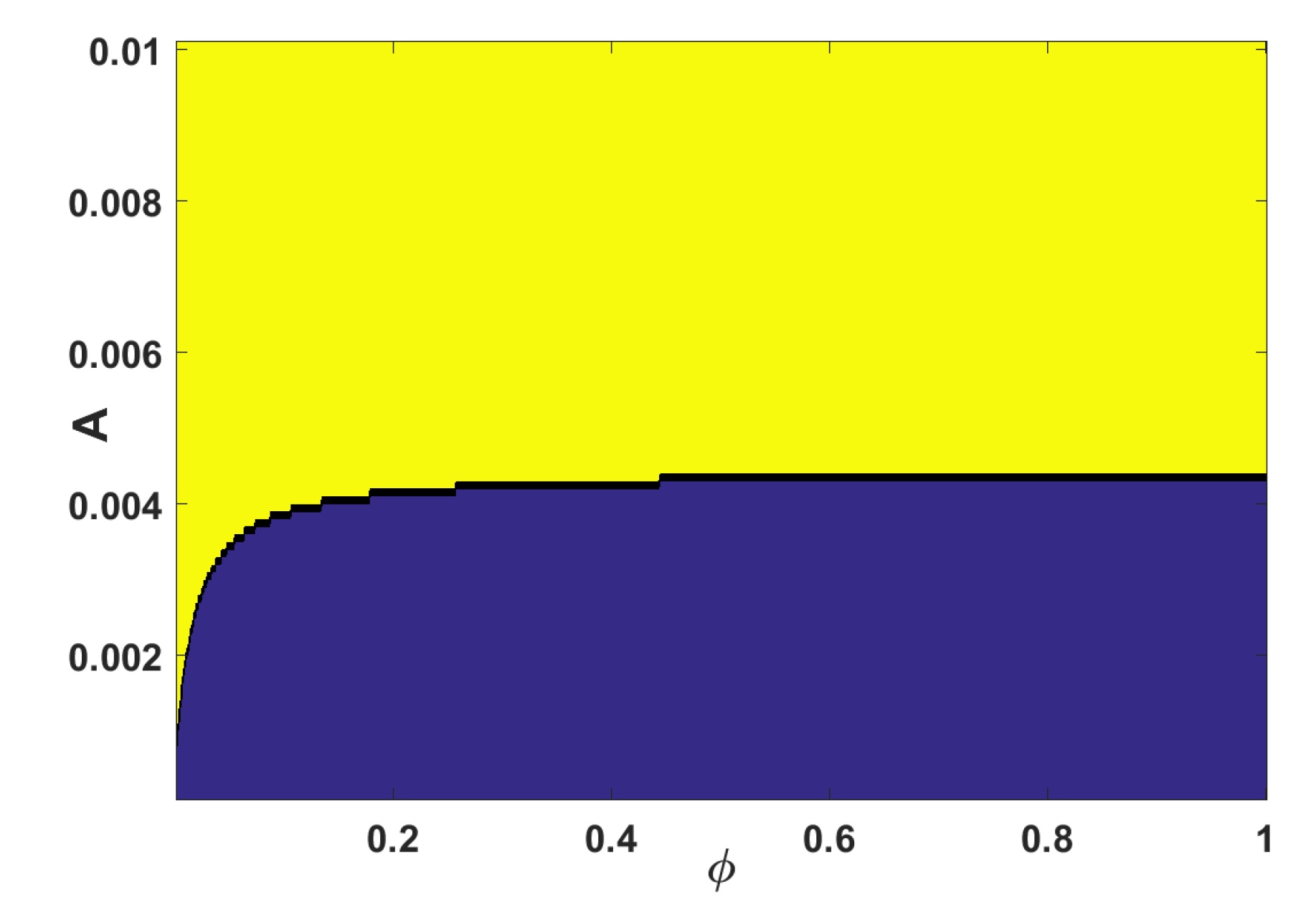
- Effect of parameters A and on
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Kermack, W.O.; McKendrick, A.G. A contribution to mathematical theory of epidemics. Proc. R. Soc. Lond. A 1927, 115, 700–721. [Google Scholar]
- Kermack, W.O.; McKendrick, A.G. Contributions to the mathematical theory of epidemics II. The problem of endemicity. Bull. Math. Biol. 1991, 53, 57–87. [Google Scholar] [PubMed]
- Kermack, W.O.; McKendrick, A.G. Contributions to the mathematical theory of epidemics III. Further studies of the problem of endemicity. Bull. Math. Biol. 1991, 53, 89–118. [Google Scholar] [PubMed]
- Inaba, H. Endemic threshold analysis for the Kermack-McKendrick reinfection model. J. Math. Monograph. 2016, 9, 105–133. [Google Scholar]
- Wang, X.; Chen, Y.; Martcheva, M.; Rong, L. Asymptotic analysis of a vector-borne disease model with the age of infection. J. Biol. Dyn. 2020, 14, 332–367. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Perasso, A.; Richard, Q. Implication of age-structrue on the dynamics of Lotka Volterra equations. Differ. Integral Equ. 2019, 32, 91–120. [Google Scholar]
- Rost, G.; Wu, J. SEIR epidemiological model with varying infectivity and infinite delay. Math. Biosci. Eng. 2008, 5, 389–402. [Google Scholar] [PubMed]
- Magal, P.; McCluskey, C.C.; Webb, G.G. Lyapunov functional and global asymptotic stability for an infection-age model. Appl. Anal. 2010, 89, 1109–1140. [Google Scholar] [CrossRef]
- Inaba, H. Age-Structured Population Dynamics in Demography and Epidemiology; Springer: Singapore, 2017. [Google Scholar]
- Okuwa, K.; Inaba, H.; Kuniya, T. Mathematical analysis for an age-structured SIRS epidemic model. Math. Biosci. Eng. 2019, 16, 6071–6102. [Google Scholar] [CrossRef] [PubMed]
- Sigdel, R.P.; McCluskey, C.C. Global stability for an SEI model of infectious disease with immigration. Appl. Math. Comput. 2014, 243, 684–689. [Google Scholar] [CrossRef]
- Kang, H.; Ruan, S.; Yu, X. Age-structured population dynamics with nonlocal diffusion. J. Dyn. Diff. Equ. 2020. [Google Scholar] [CrossRef]
- Zhang, R.; Li, D.; Liu, S. Global analysis of an age-structured SEIR model with immigration of population and nonlinear incidence rate. J. Appl. Comput. 2019, 9, 1470–1492. [Google Scholar] [CrossRef]
- Lin, J.; Xu, R.; Tian, X. Global dynamics of an age-structured cholera model with multiple transmissions, saturation incidence and imperfect vaccination. J. Biol. Dyn. 2019, 13, 69–102. [Google Scholar] [CrossRef] [Green Version]
- Barril, C.; Calsina, A.; Cuadrado, S.; Ripoll, J. Reproduction number for an age of infection structured model. Math. Model. Nat. Phenom. 2021, 16, 42. [Google Scholar] [CrossRef]
- Ahmed, H.M.; Elbarkouky, R.A.; Omar, O.A.M.; Ragusa, M.A. Models for COVID-19 daily confirmed cases in different countries. Mathematics 2021, 9, 659. [Google Scholar] [CrossRef]
- Khan, M.A.; Ismail, M.; Ullah, S.; Farhan, M. Fractional order SIR model with generalized incidence rate. AIMS Math. 2020, 5, 1856–1880. [Google Scholar] [CrossRef]
- Ríos-Gutiérrez, A.; Torres, S.; Arunachalam, V. Studies on the basic reproduction number in stochastic epidemic models with random perturbations. Adv. Differ. Equ. 2021, 2021, 288. [Google Scholar] [CrossRef]
- Calsina, A.; Ripoll, J. Hopf bifurcation in a structured population model for the sexual phase of monogonont rotifers. J. Math. Biol. 2002, 45, 22–36. [Google Scholar] [CrossRef]
- Posny, R.; Wang, J.; Mukandavire, Z.; Modnak, C. Analyzing transmission dynamics of cholera with public health interventions. Math. Biosci. 2015, 264, 38–53. [Google Scholar] [CrossRef]
- Webb, G.F. Theory of Nonlinear Age-Dependent Population Dynamics; Marcel Dekker: New York, NY, USA, 1985. [Google Scholar]
- Smith, H.L.; Thieme, H.R. Dynamical Systems and Population Persistence; Amecican Mathematical Society: Providence, RI, USA, 2011. [Google Scholar]
- Barril, C.; Calsina, A.; Cuadrado, S.; Ripoll, J. On the basic reproduction number in continuously structured populations. Math. Meth. Appl. Sci. 2021, 44, 799–812. [Google Scholar] [CrossRef]
- Breda, D.; Florian, F.; Ripoll, J.; Vermiglio, R. Efficient numerical computation of the basic reproduction number for structured populations. J. Comput. Appl. Math. 2021, 384, 113165. [Google Scholar] [CrossRef] [PubMed]
- Barril, C.; Calsina, A.; Ripoll, J. A practical approach to R0 in continuous-time ecological models. Math. Methods Appl. Sci. 2017, 41, 8432–8445. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, H.; Wang, J. Global Dynamics of an SEIR Model with the Age of Infection and Vaccination. Mathematics 2021, 9, 2195. https://doi.org/10.3390/math9182195
Li H, Wang J. Global Dynamics of an SEIR Model with the Age of Infection and Vaccination. Mathematics. 2021; 9(18):2195. https://doi.org/10.3390/math9182195
Chicago/Turabian StyleLi, Huaixing, and Jiaoyan Wang. 2021. "Global Dynamics of an SEIR Model with the Age of Infection and Vaccination" Mathematics 9, no. 18: 2195. https://doi.org/10.3390/math9182195
APA StyleLi, H., & Wang, J. (2021). Global Dynamics of an SEIR Model with the Age of Infection and Vaccination. Mathematics, 9(18), 2195. https://doi.org/10.3390/math9182195