1. Introduction
Source identification problems are widely investigated in many research fields [
1,
2,
3,
4,
5,
6,
7,
8,
9], and they are modeled by boundary value problems for which the analysis of the associated forward problem and its corresponding inverse problem must be considered, see, e.g., [
10,
11]. The latter problem involves determining the source that yields the measurement on the boundary of the region [
12,
13,
14]. The inverse source problem appears in different applications, such as inverse electroencephalography, inverse electrocardiography and inverse geophysics (see, e.g., [
15,
16,
17,
18,
19,
20,
21,
22,
23]), where the problems are modeled using differential equations. Numerical solutions to differential equations are crucial in mathematics and engineering because they appear in many applications, such as population growth, diffusion processes, electromagnetic problems, and elasticity problems. The finite difference method, the finite element method, the boundary element method, and the method of fundamental solutions are used for the numerical solution to boundary value problems, with or without initial conditions on the boundary, governed by certain partial differential equations [
24,
25,
26,
27]. The finite element method is one of the most important numerical methods for solving differential equations [
28]. It has been used for solving the inverse source problem using the gradient conjugate method and a control approach [
19,
29,
30]. Recently, it has been used to solve differential equations with the Henstock–Kurzweil functions [
31]. It is applied to obtain a solution with highly oscillatory functions. Special quadratures have been applied to calculate the integrals that appear in the weak formulation of the finite element method [
32]. In this study, we applied the trapezoidal rule to calculate integrals that appear in the applications of the finite element method. The layer potential technique has been used to obtain the solution to the inverse source problem in electrocardiography and electroencephalography (see [
15,
17,
18]), and it was not considered in this study.
In this study, we investigate a case in which the sources are located on the separation interface between two different homogeneous media. The problem of identifying either sources having compact support within a finite number of small subdomains (see [
12]), pointwise sources, electrostatic mono and dipole sources, or combinations of these (see [
13,
14]), are not considered in this work. The sources are identified from measurements on the exterior boundary of the bounded domain, and the relationship between the sources and the measurements is established using an elliptic model, as shown in
Section 2. The inverse source problem associated with this elliptic model can be categorized into three problems:
The Cauchy problem for the Laplace equation in the homogeneous annular region.
The Dirichlet problem for the Laplace equation in the homogeneous interior region.
The source identification problem from the normal derivatives of the solutions to the Cauchy and Dirichlet problems.
The Cauchy problem is ill-posed because it presents numerical instability, i.e., minimal errors in the measurement can yield significant changes in the solution. To manage such instability, we employed the algorithm proposed in [
29], where a penalization method was applied (equivalent to the Tikhonov regularization [
33,
34]); the conjugate gradient method; and the finite element method, where the regularization parameter was determined by the Tikhonov criterion. To obtain the numerical solution to the forward problem and elliptical problems that appear in the conjugate gradient algorithm and the Dirichlet problem, we performed a finite element approximation [
35].
The source was recovered from the normal derivatives of the solutions to the Cauchy and Dirichlet problems. For the stable recovery of the normal derivatives, we applied the sequential smoothing method.
Furthermore, we considered cases involving sources that are typically associated with applications (see [
15,
17]).
This paper is organized as follows. In
Section 2, we introduce an elliptic model (a boundary value problem) that relates the sources with the measurements, and the results of existence and uniqueness are included for the classical and weak solutions to the given model. In
Section 3, the inverse source problem is uncoupled into three problems that allow us to obtain the stable algorithm. In
Section 4, we present the control approach of the Cauchy problem, cost function, and Tikhonov regularization. In
Section 5, we present the analytical solution to forward and inverse problems in a circular domain using circular harmonics expansion series. In
Section 6, we present the stable algorithm for the inverse source problem.
Section 7 presents the numerical results of the proposed method for circular and irregular geometries. In
Section 8, we present a discussion about the most relevant results obtained in this work. Finally, conclusions are provided in
Section 9.
4. Control Approach of Cauchy Problem: Cost Function
The Cauchy problem is important and applicable to various fields, e.g., inverse electrocardiography, inverse electroencephalography, and electrical capacitance tomography [
16,
18,
21,
36]. To investigate the Cauchy problem, we considered the following linear, injective, and compact operator
expressed as
where
w is the solution to the following state equation:
The relationship between problems (
8) and (
12) can be described using operator
K as follows: a solution
w to problem (
12) is also a solution to problem (
8) if we select
on
such that
where
w is the solution to state Equation (
12), and
V is the known measurement in problem (
8), from where
.
The proof of the following theorem, which allows us to apply the regularization methods, is provided in [
37].
Theorem 5. is dense in .
Because the operator
K is linear, injective, compact, and defined on a space of infinite dimension, its inverse
is not continuous [
33]. This results in numerical instability, which causes the ill-posedness of this problem. To manage this numerical instability, we used the Tikhonov regularization method in this study, which will be stated below, in
Section 4.1.2. In the following subsection we provide the variational formulation which allows us to relate the control approach and the Tikhonov regularization in a straightforward manner.
4.1. Variational Formulation of Inverse Problem
4.1.1. Control Approach of Cauchy Problem and Cost Function
In [
29], the Cauchy problem (
8) is solved by minimizing the following cost function:
where
k is the penalization parameter,
is the boundary control on
in (
12), and
K is defined by (
13). Therefore, we can approximate the controllability problem (
14) using one of the following kinds of approximation by penalty:
The density property provided in Theorem 5 and the standard convexity arguments guarantee that (
15) has a unique minimum (see, for instance [
38]), characterized by
To minimize the cost function (
14), we applied the conjugate gradient method provided in [
29], where the first derivative (variation) of
is required. In this case, the derivative of
is expressed as
where
v is the solution to the
adjoint problem
and
is the solution to state Equation (
12).
4.1.2. Tikhonov Regularization Method
This method is used to handle the numerical instability associated to ill-posed problems, which depends on a parameter
called the regularization parameter that is chosen in terms of the error
that is known [
33]. Let
be the noisy data of measurement
V in Cauchy problem (
8), where
is the measurement error of
V, i.e.,
. To manage the numerical instability from using equation
, we used the Tikhonov regularization method. The selection of the penalization parameter
k in (
14) is equivalent to obtaining a regularization parameter
for the Tikhonov functional
where
, which depends on
, must be selected appropriately. Hence, we used the known results of the Tikhonov regularization to select the appropriate
.
Let
be an approximation of
, where
is the adjoint operator of
K, and
is the operator associated with the Tikhonov regularization strategy that possesses the properties described in the following theorems [
33]:
Theorem 6. is boundedly invertible, and is the unique solution to the normal equation . Furthermore, .
Theorem 7. Any selection of such that and ensures thatwhen , where . In this case, is known as ‘admissible’, and Different methods can be used to determine the suitable regularization parameter that balances the two terms of the functional
, e.g., the discrepancy principle and the
L-curve. The term
L-curve originates from the shape of the curve which corresponds to a log-log plot of the norm of a regularized solution vs. the norm of the corresponding residual norm. More geometrical and analytical details are provided in [
39].
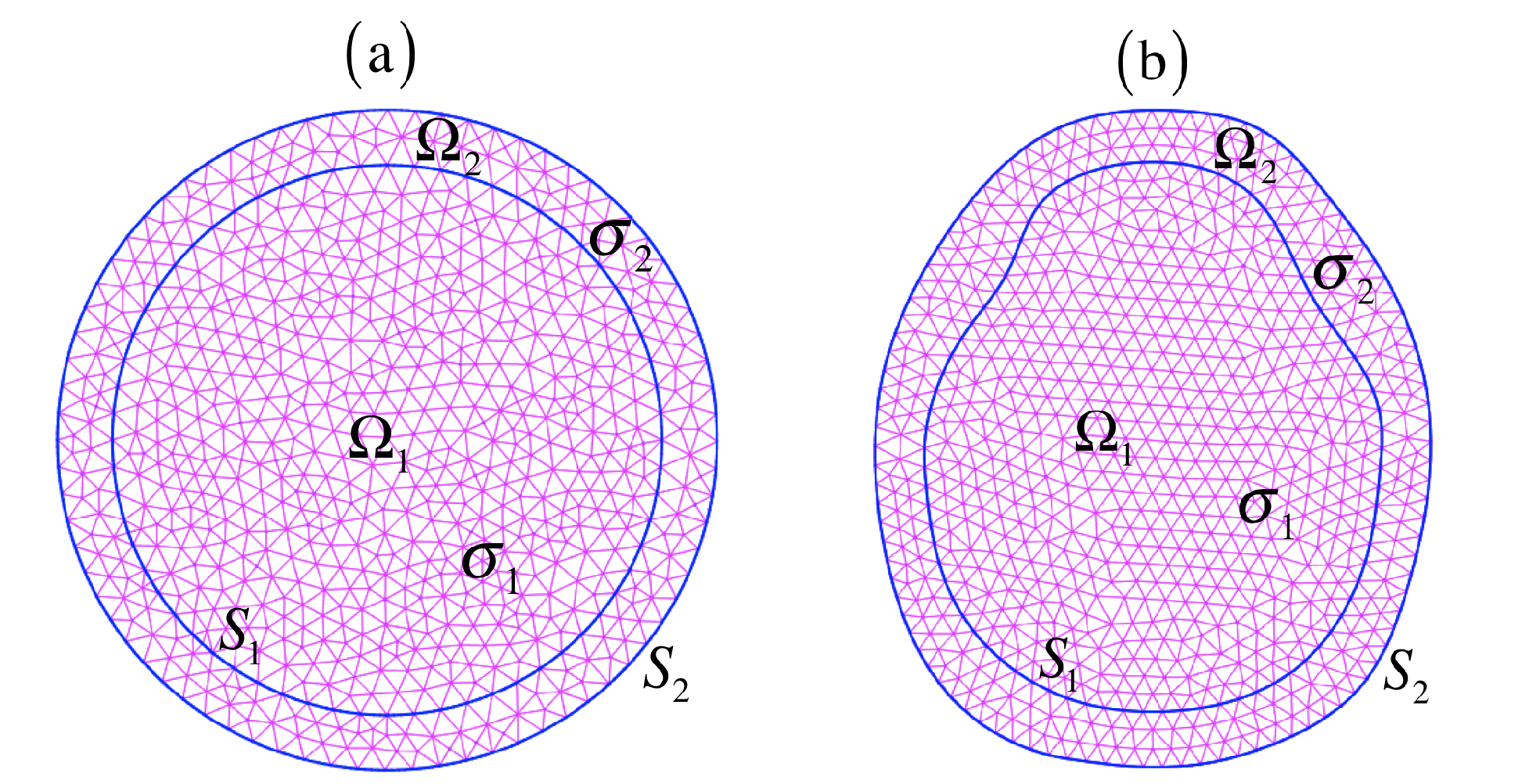
7. Numerical Examples
Based on two examples, we present the numerical results obtained using the methodology discussed in
Section 6. Each example includes a different type of two-dimensional bounded region: a circular
determined by two concentric circles centered in the origin, i.e.,
is a circular domain of radius
;
, which is a circular annular domain with interior radius
and exterior radius
(see
Figure 1a), and the complex region shown in
Figure 1b. The forward problem is solved by selecting a source
g on
, followed by obtaining the solution
u to the SBP (
1)–(
5) and then computing
. Subsequently, the obtained potential
V is provided as input data to the control problem (
15) or cost function (
14). Next, we consider examples with noiseless data
V and noisy data
, where
is the measurement error, i.e.,
. The noisy data
were obtained by adding a random error using the
function in MATLAB. Therefore, we define
where
is a vector of random numbers of length
s, where
s is the numbers of nodes on
.
Since the measurements are obtained by a device, they contain inherent error generated by different circumstances, such as rounding error (due to approximation or truncation), measurement handling, and device quality. We want to emphasize that the algorithm proposed works with different error levels. As an example, the electroencephalogram recorded on the scalp detects the voltage produced by bioelectrical activity and also detects artifacts produced by ocular and muscular movement. Thus, filters are applied to obtain a clean signal. Additionally, the sensitivity of the device generates errors.
However, we want to emphasize that the algorithm proposed works with different error levels. According to the numerical results, the error between the exact and approximate sources obtained by this method is proportional to the measurement error.
The corresponding approximate solution to problem (
9) is denoted by
, and the corresponding approximate solution to state Equation (
12) is denoted by
and
, where
n denotes the number of conjugate gradient iterations to achieve a specific tolerance
,
h is the size of the triangular mesh of
, and
k is the penalization parameter. Moreover, their corresponding approximations to the normal derivative without and with sequential smoothing are denoted by
,
,
, and
, respectively, where
is the number of sequential smoothing. Finally, we denote
as the numerical approximation to
g from the exact measurement
V.
For noisy data , the corresponding numerical solution is denoted by , , and .
In this case, the penalization parameter
, where we assume
thus,
satisfies the Tikhonov criteria provided in Theorem 7.
The corresponding approximations to the normal derivative without and with the sequential smoothing of and are denoted by , , , and , respectively. Hence, we recovered an approximate stable source from the measurement with error .
For the numerical implementation of the proposed method in each example, we applied the finite element method to solve the elliptic problems that appeared in the algorithm proposed herein, using three different meshes. These meshes were denoted by
,
, where
and
represent the number of nodes (vertices) and elements (triangles), respectively. Meshes
and
were obtained from successive regular refinements of the coarsest mesh
with mesh size
.
Figure 1a,b show the corresponding mesh
of the circular and irregular region, respectively. Meshes
,
, and
were generated using
pdetool in MATLAB.
In the examples below, we considered the following absolute and relative errors for different values of
:
where
is the recovered source, and
g is the exact source. Furthermore, we considered the relative error between the noisy data
and noiseless data
V, expressed as
Example 1. In this example, we considered the circular region Ω defined above, with , , , and . Let for all be the exact source; therefore, it belongs to and satisfies condition (6). In polar coordinates, g is expressed aswhere the unique Fourier coefficient different from zero is . Subsequently, the exact solution u to the SBP for the exact source g, using circular harmonics series, isandwhere their corresponding exact normal derivatives on the interior boundary are expressed as The solution to the forward problem for the exact source g is the exact measurement V provided in Equation (23), i.e., Results for circular region with noiseless input data V. For the case of noiseless data V, the numerical results are summarized in Table 1, where the following errors were included: , and . In this case, the penalization parameter, associated to the Cauchy problem, was set to , and we defined the stopping tolerance (which is the criterion used to stop the conjugate gradient method when the residual norm for (see [29])) as . The relative errors decreased with each refinement of mesh , showing the convergence of the discrete space. Moreover, the estimated computation times of the algorithm proposed for meshes , , and were , , and s, respectively. The computation time of mesh was greater than that of mesh because the numbers of nodes (vertices) and elements (triangles) were greater than those in mesh ; furthermore, the number of smoothing increased. The computation time of mesh was the highest because the numbers of nodes (vertices), elements (triangles), and smoothing increased. Figure 2 shows the exact source g and recovered source (at iteration ) on , for noiseless data V. The approximation is acceptable from the practical perspective. In fact, the highest relative error was , which was obtained using the coarsest mesh , where was calculated as shown in Step 3 of Section 6, i.e., by computing the approximate solutions and to problems (8) and (9) after applying the sequential smoothing method for computing their normal derivatives in stable form, as denoted by and on , respectively. These are shown in Figure 3, where the number of sequential smoothing was . A similar behavior was observed when using meshes and . Results for circular region with noisy input data . We selected the noisy data from Equation (36) and the coarsest mesh . The values differed from the noiseless data as defined above. Table 2 shows the results for the circular region for different values of δ, from where we observed that the numerical solutions converged to the noiseless solutions as δ approached zero; this demonstrates the stability of the numerical results against perturbations in measurement V for the circular region. In addition, the computation time of the algorithm proposed for each value of δ was , , , and s, with . The computation time for was the lowest because the number of smoothing was minor (). Figure 4 shows the plots of the exact measurement V, recovered data with measurement with error when , and corresponding recovered source (at iteration ) on that was calculated as shown in Step 3 of Section 6. Figure 5 shows the smoothing normal derivatives and from the corresponding recovered derivatives of and , respectively. In this case, the penalization parameter was selected as in the case of noisy data , i.e., . The stopping tolerance was , and the number of smoothing was for , , and . In this case, the highest relative error between the exact source g and the recovered source was using the coarsest mesh . We observed that the recovered solutions converged to the exact solution g when δ approached zero. Example 2. For this case, we considered the complex region shown in Figure 1b and the exact source g expressed asfor all where , m denotes the Lebesgue measure on , , and . In this case, g belongs to and satisfies condition (6). Furthermore, the exact solution u to the SBP and the exact measurement (for this source g) were calculated numerically using the finite element method and a very fine mesh, which we denote as . This mesh was obtained after three regular refinements of the starting mesh, i.e., shown in Figure 1b. In addition, we computed the exact normal derivatives of and on the interior boundary , as shown in Equations (25) and (26), respectively, using the exact solution u calculated based on the finest mesh . Results for irregular region with noiseless data V. The numerical results in Table 3 show the convergence regarding the discrete space of the complex domain Ω for the source g defined in Equation (44), with the penalization parameter and stopping tolerance . The computation time in mesh was the highest because mesh was the finest, i.e., the numbers of nodes (vertices) and elements (triangles) were greater than those in meshes and , and the number of smoothing increased to 30 in mesh . We observed that the relative numerical errors on the interior boundary, , were slightly higher for the complex region because the interior boundary was more complex than the corresponding circular region. In addition, the number of conjugate gradient iterations for achieving the desired accuracy was higher for the complex region presented in meshes and .
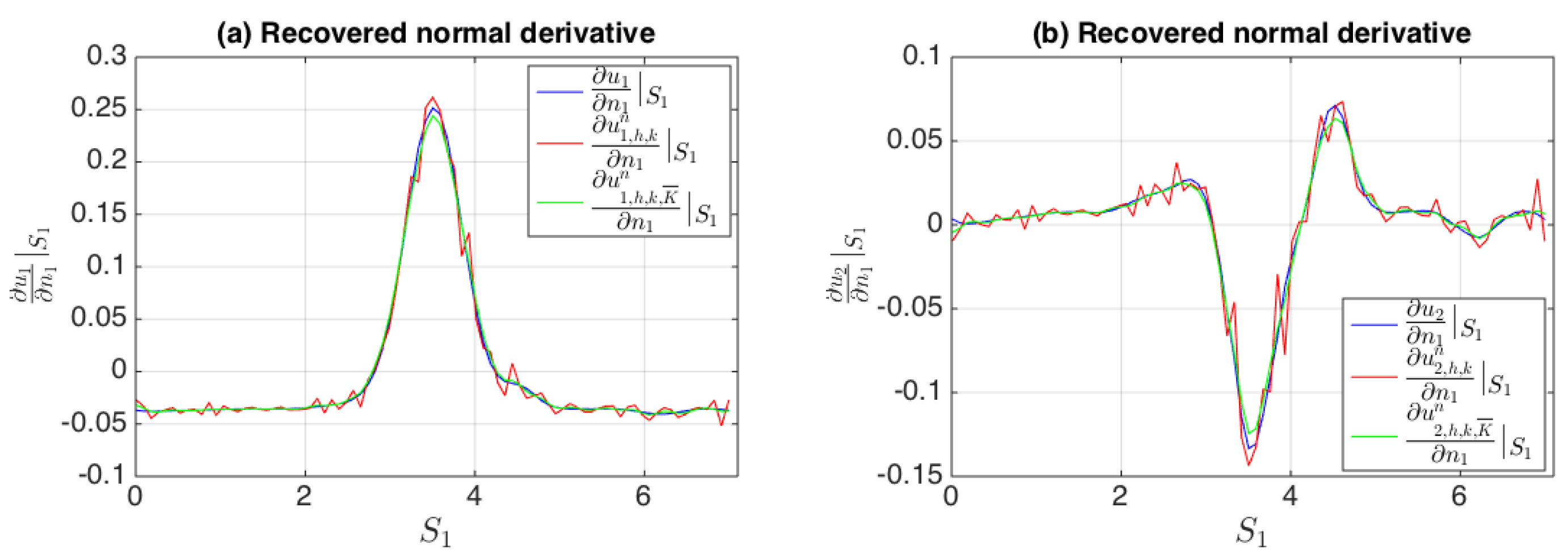
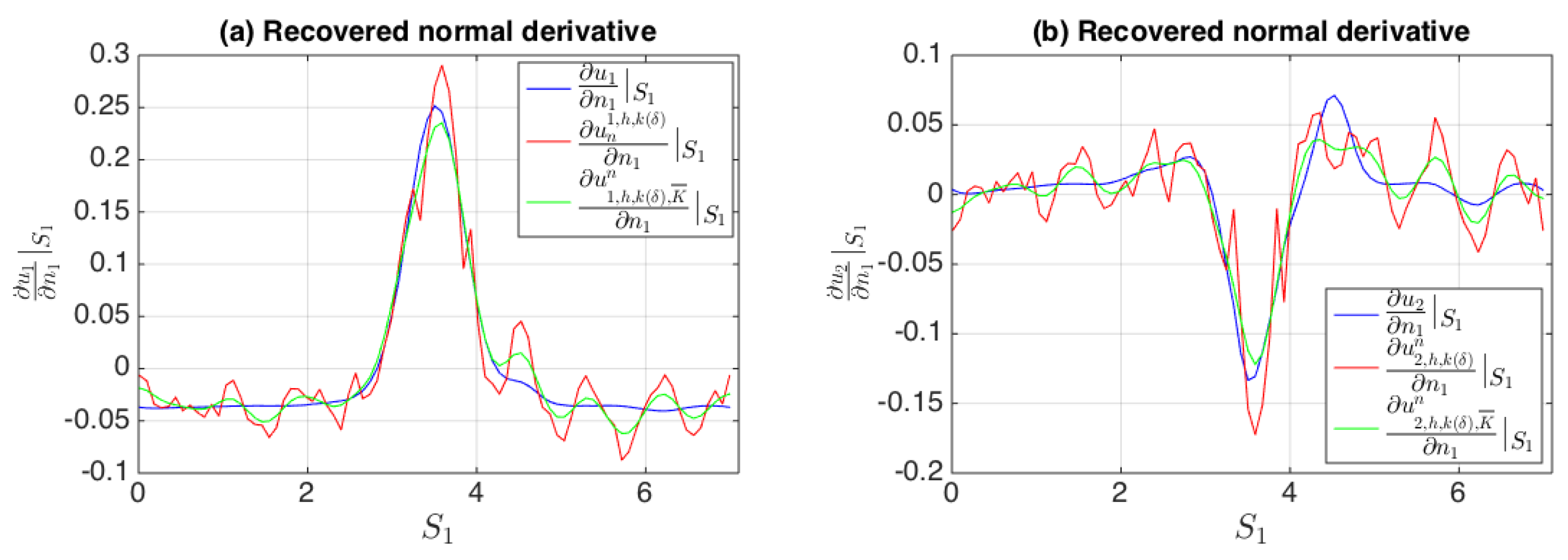
Figure 6 shows the exact g and recovered sources (at iteration ) on , for noiseless data V. In this case, the highest relative error of was observed in the coarsest mesh . A similar behavior was observed when using meshes and . The plots of the exact normal derivatives of and and their corresponding approximations without and with sequential smoothing corresponding to the input data without error V are shown in Figure 7, where the number of sequential smoothing was . Results for irregular region with noisy input data . Table 4 shows the numerical results for the complex region when the input data V were perturbed, as in Equation (36) for source in Equation (44), using mesh of the complex region Ω shown in Figure 1b. In each case, one can observe that the qualitative behavior was similar to that of the circular region, and the highest relative error of the approximate solution was in the coarsest mesh . In addition, in this mesh, the computation time for was lower than for , , and because the number of smoothing was lesser (). The numerical solutions converged to when δ approached zero, demonstrating the stability of the numerical results against perturbations in the irregular region. Figure 8 shows the plots of the exact measurement V, recovered data with measurement error when (left), and corresponding recovered source (at iteration ) on of the irregular region (right), which was calculated using the algorithm proposed in Section 6. Figure 9 shows the normal derivatives without and with the sequential smoothing of and . In this case, the penalization parameter was selected, as in the case of noisy data , i.e., . The stopping tolerance was , and the number of smoothing was . In this case, the highest relative error between the exact source g and recovered source was in the coarsest mesh . Therefore, we demonstrated that our approach yielded convergent solutions that were stable against perturbations of the input data V in circular and irregular nonhomogeneous region media Ω.
Comparison with Other Method
We present the comparison of the solutions to the inverse source problem using the method proposed in this work that we called Method 1 (see
Section 6) and the one presented in reference [
30] that we called Method 2, which uses operator
A shown in
Section 2.3 (Operational statement).
We consider the circular and irregular region given in the examples from this section with the same values for
,
,
, and
. In the case of the circular region
, we consider the exact source
, for all
, that in polar coordinates is given by (
38), and the exact source
g given by (
44) with
and
, that expressed in polar coordinates takes the form
where
, for all
,
, and
.
In this case,
g belongs to
and satisfies condition (
6). For this exact source
g, we approximated function
by its truncated Fourier series
using the first
N terms. In this case, both the exact solution
u to the forward problem (
1)–(
5) and the exact measurement are generated with the first
terms of the Fourier series (
21)–(
23), and
. The Fourier coefficients
,
,
are obtained numerically using the function
quadl of MATLAB. The plots of
g and its approximation
are shown in
Figure 10. In the following, we denote the approximation
by
g.
In the case of the irregular region
shown in
Figure 1b, we considered the exact source
g given by (
44), with the same values for
and
, and the exact source
g expressed as
for all
, where
. In this case,
g belongs to
and satisfies condition (
6) too. Furthermore, the exact solution
u to the forward problem (
1)–(
5) and the exact measurement
(for this source
g) were calculated numerically using the finite element method with the finest mesh
of the irregular region
. In addition, we computed the exact normal derivatives of
and
on the interior boundary
, as shown in Equations (
25) and (
26), respectively, using the exact solution
u calculated based on the finest mesh
.
Table 5 and
Table 6 show the numerical results for the circular and irregular region for input noisy data
, for
in mesh
of each region, respectively, and where the computation time and the following relative errors are included:
,
of each method, where
is the corresponding recovered source given by Method 2. In this case, the regularization parameter
was chosen by the
L-curve method.
In order to compare the efficiency of Methods 1 and 2, we considered the same measurement with error
of each source
g in each region
, and the same stopping tolerance
for the conjugate gradient method proposed in Methods 1 and 2. In this case, the regularization parameter
for the circular region and
for the irregular region. From the numerical results, we observed the following important properties (for
): (a) All relative errors corresponding to the sources recovered by each method are proportional to the relative perturbation
, showing the stability of the numerical results regarding perturbations for the circular and irregular region, respectively; (b) All relative errors corresponding to the sources recovered by each method are of the same order in each region
; (c) The computation time of Method 1 was lower than that of Method 2, because Method 1 solves the Cauchy problem for the Laplace Equation (using the conjugate gradient method provided in [
29]), in the smaller sub-region
contained in
and with a smaller number of iterations than Method 2 that solves the inverse problem applying the conjugate gradient method proposed in [
30], wherein each iteration two elliptical problems are solved in the largest region
. In addition, Method 1 also includes the computation time to solve the Dirichlet problem for the Laplace equation in the smaller sub-region
contained in
(which is calculated only once), the calculation of normal derivatives and the applying of the sequential smoothing method for the calculation of the stable derivatives, and the calculation of the recovered source
using formula (
10).
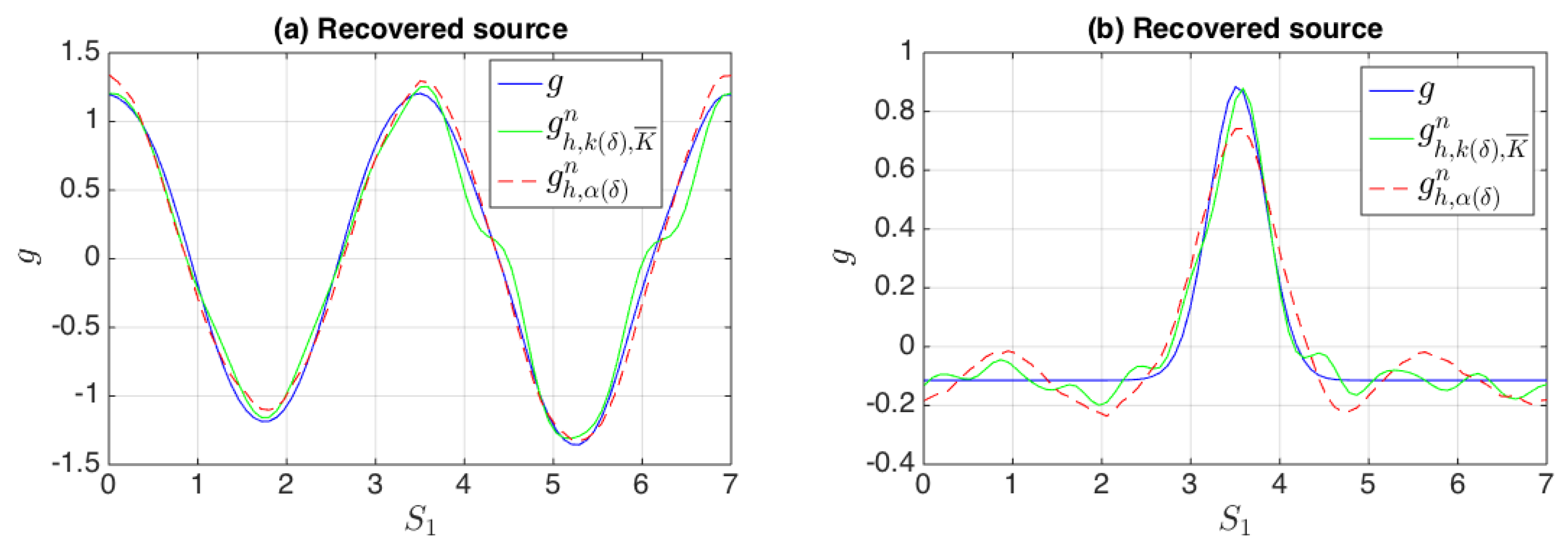
The plots of the sources recovered from the measurement with error
(
) by each method are shown in
Figure 11 and
Figure 12, using mesh
of the circular and irregular region, respectively.
From
Table 5 and
Table 6, we observed that the method proposed in this work is better, regarding the computational cost, than the one presented in [
30]. Furthermore, the relative errors of the sources recovered by Method 1 are of the same order as the ones recovered by Method 2, which are proportional to the relative perturbation
, showing the stability of the numerical results regarding perturbations for both the circular and irregular region.

 ,
, 












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}