
On the Verification of the Pedestrian Evacuation Model †


Abstract
:1. Introduction
2. Governing Equations
2.1. Functional Dependence
2.1.1. Integral Formulation
2.1.2. Differential Formulation
3. Numerical Solution
3.1. Splitting Schemes
3.1.1. Splitting Scheme I
3.1.2. Splitting Scheme II
3.2. FV Discretization of the Splitting Scheme I
3.2.1. FV Discretization of the Hyperbolic System (12)
3.2.2. FV Approximation of in (13)
3.2.3. FV Approximation of
3.2.4. FV Approximation of
3.3. Discretization of System (14)
3.4. Splitting Algorithm I
| Algorithm 1 Runge-Kutta splitting |
| Set the initial condition and the method M for the determination of direction , , fordo (1) ; ; (2) ; (3) ; ; ; end for |
| Algorithm 2 Euler splitting |
| fordo (1) ; (2) ; (3) ; end for |
3.5. FV-DG Discretization of the Splitting Scheme II
3.6. FV-DG Approximation of in (15)
3.6.1. FV-DG Approximation of
3.6.2. FV-DG Approximation of
3.6.3. FV-DG Approximation of the Direction
3.7. FV-DG Discretization of (16)
3.8. Resulting FV-DG Scheme
Solution of FV-DG Scheme
4. Results
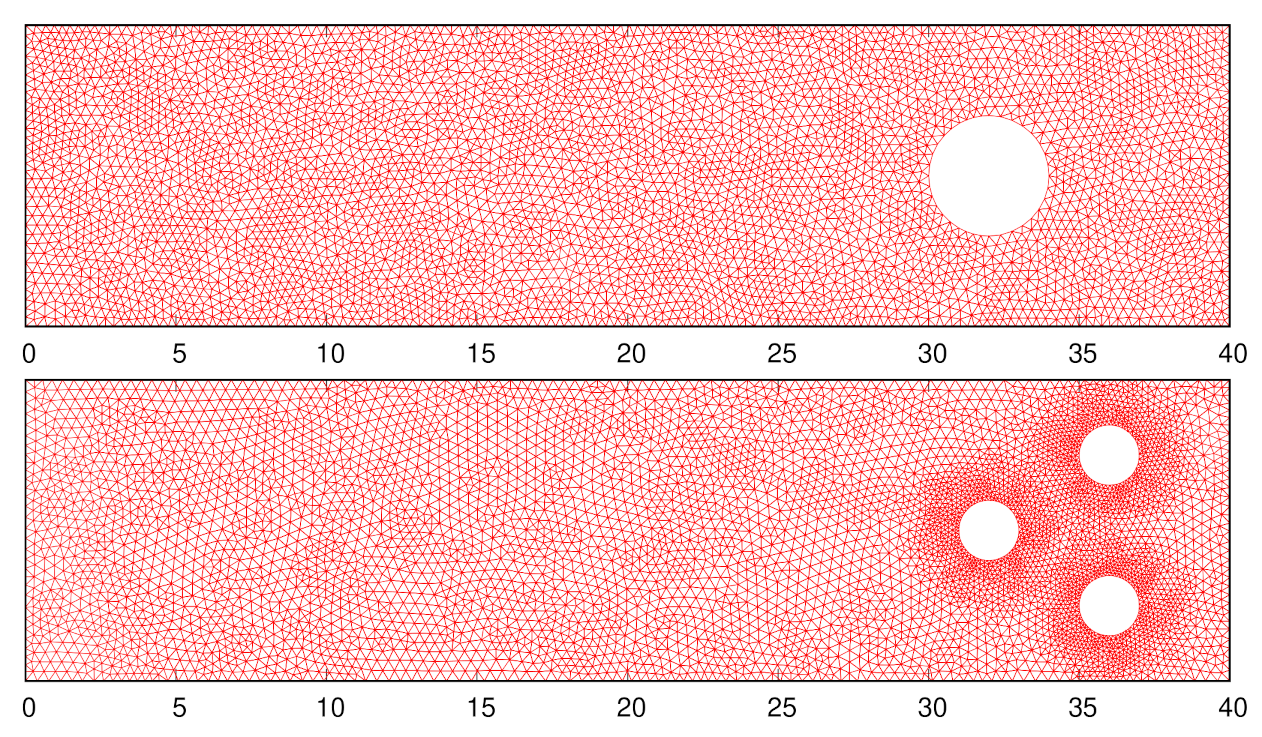
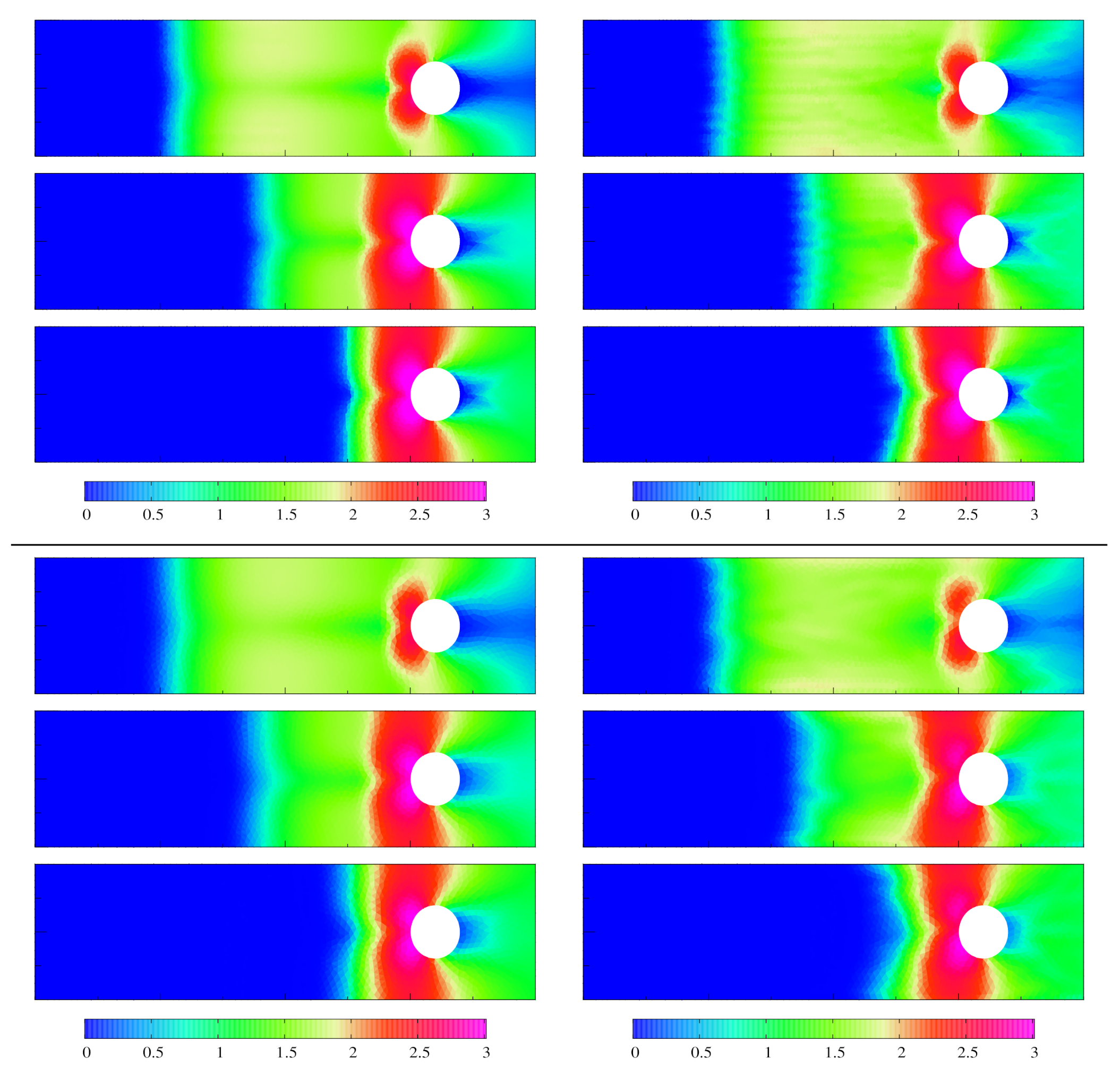
4.1. Domain with One Obstacle
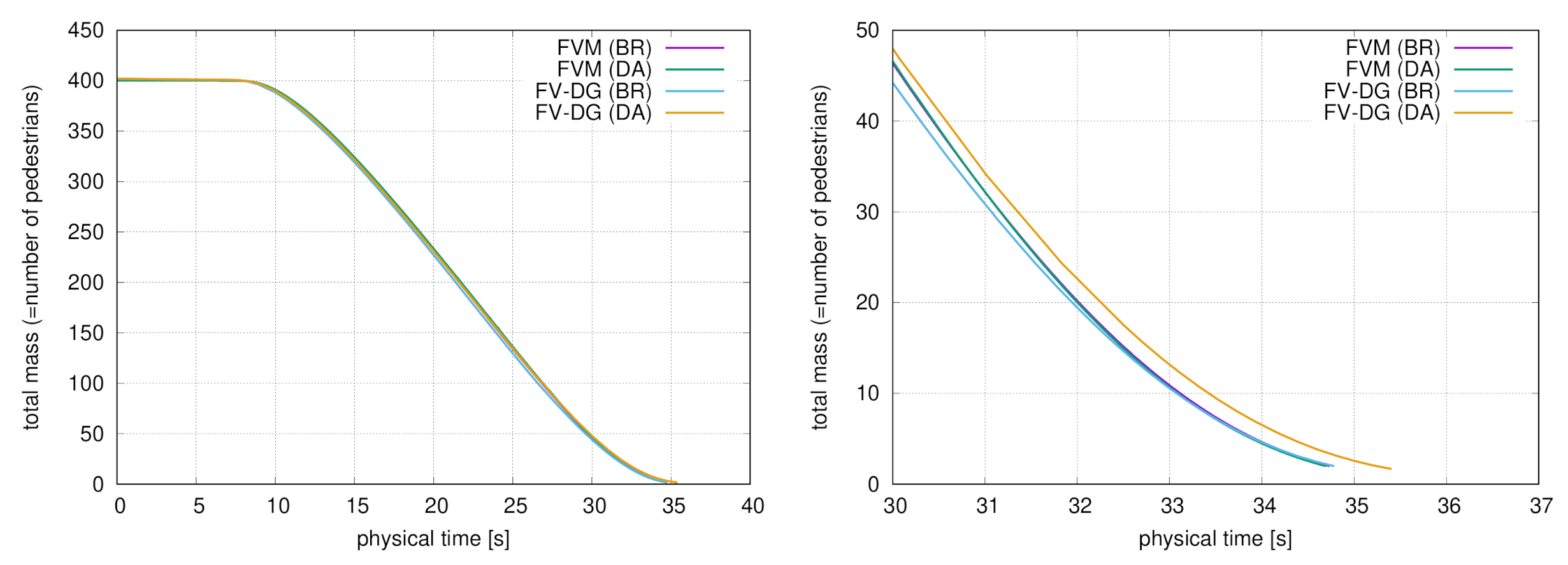
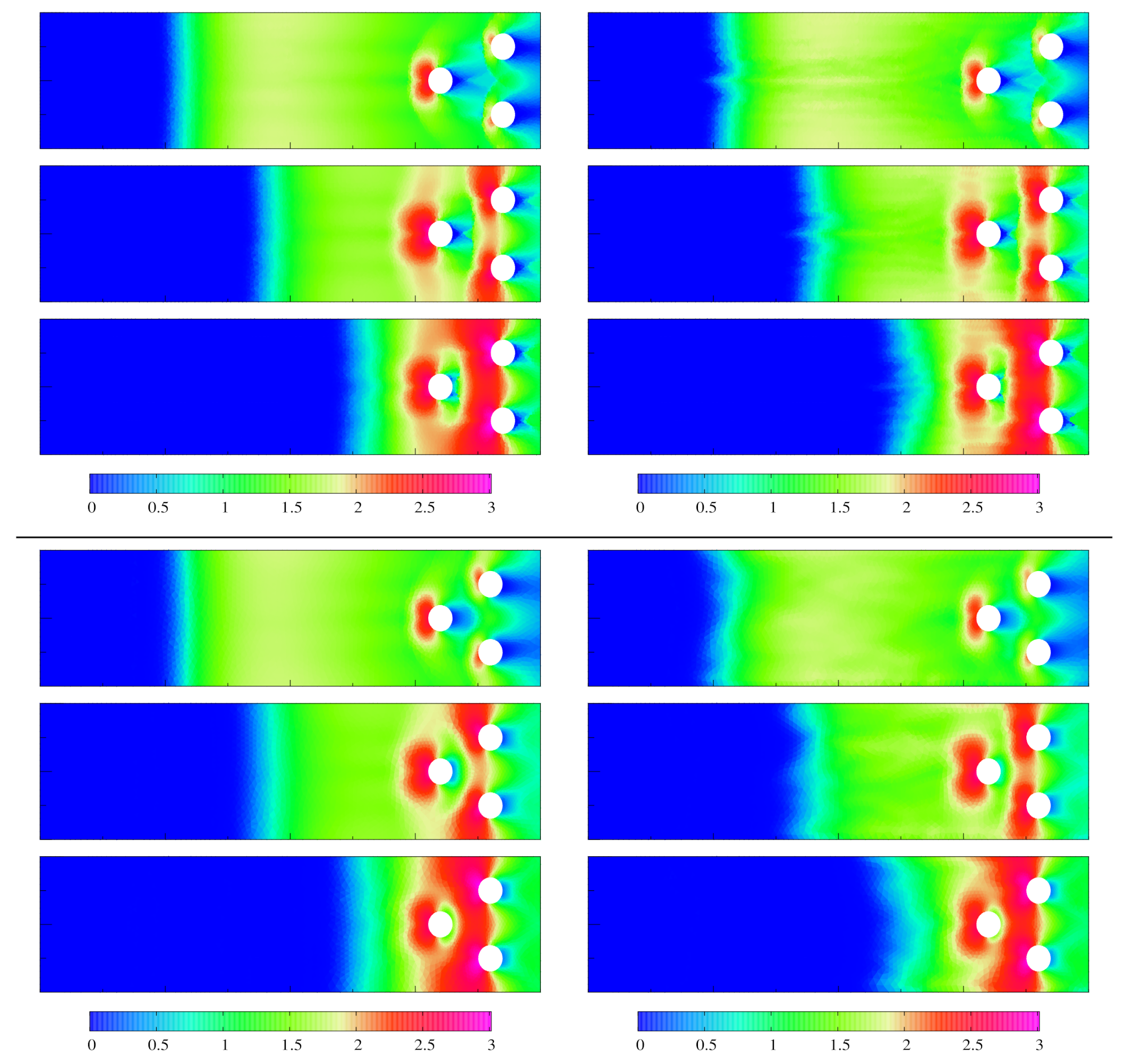
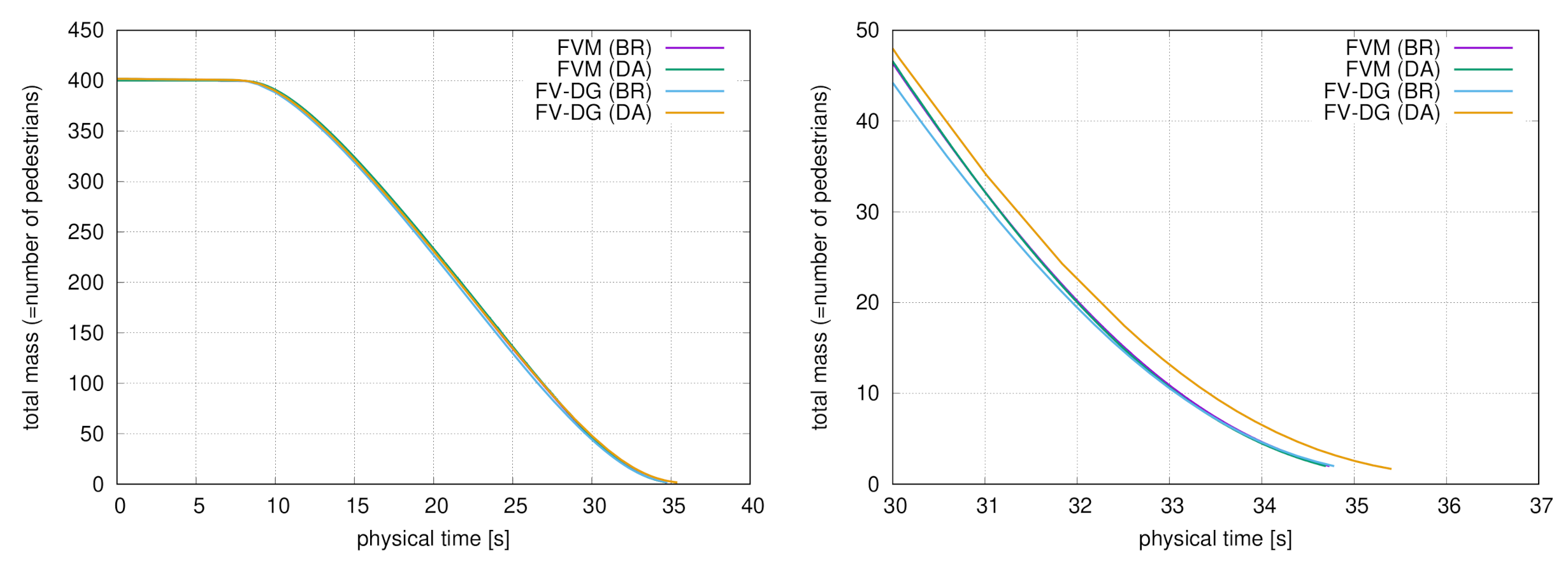
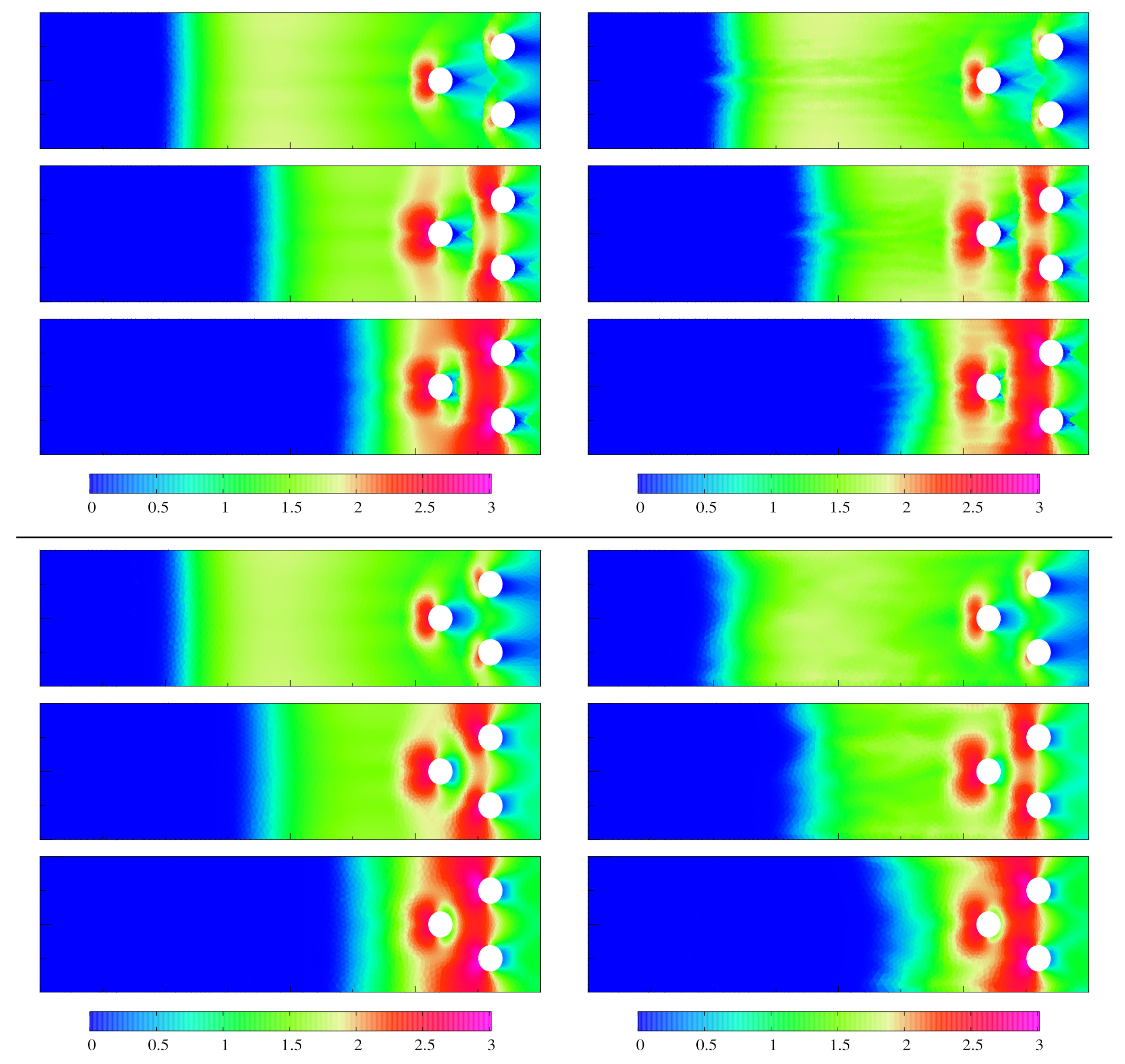
4.2. Domain with Three Obstacles
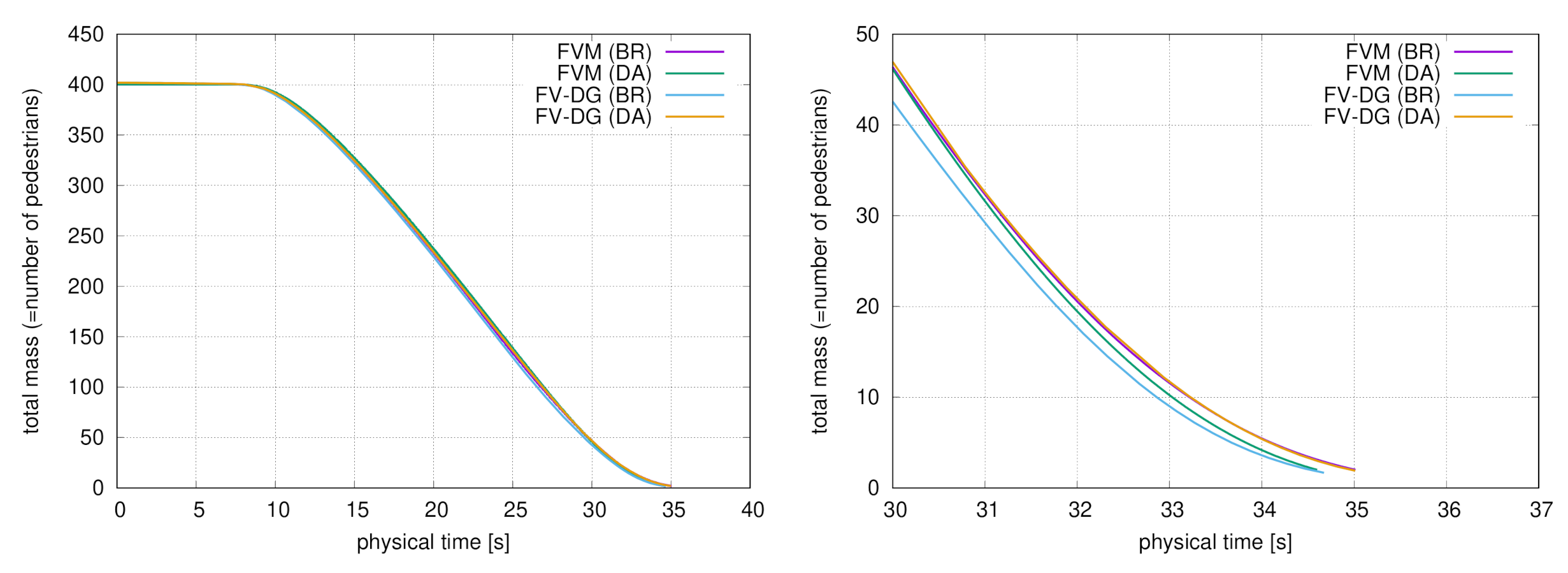
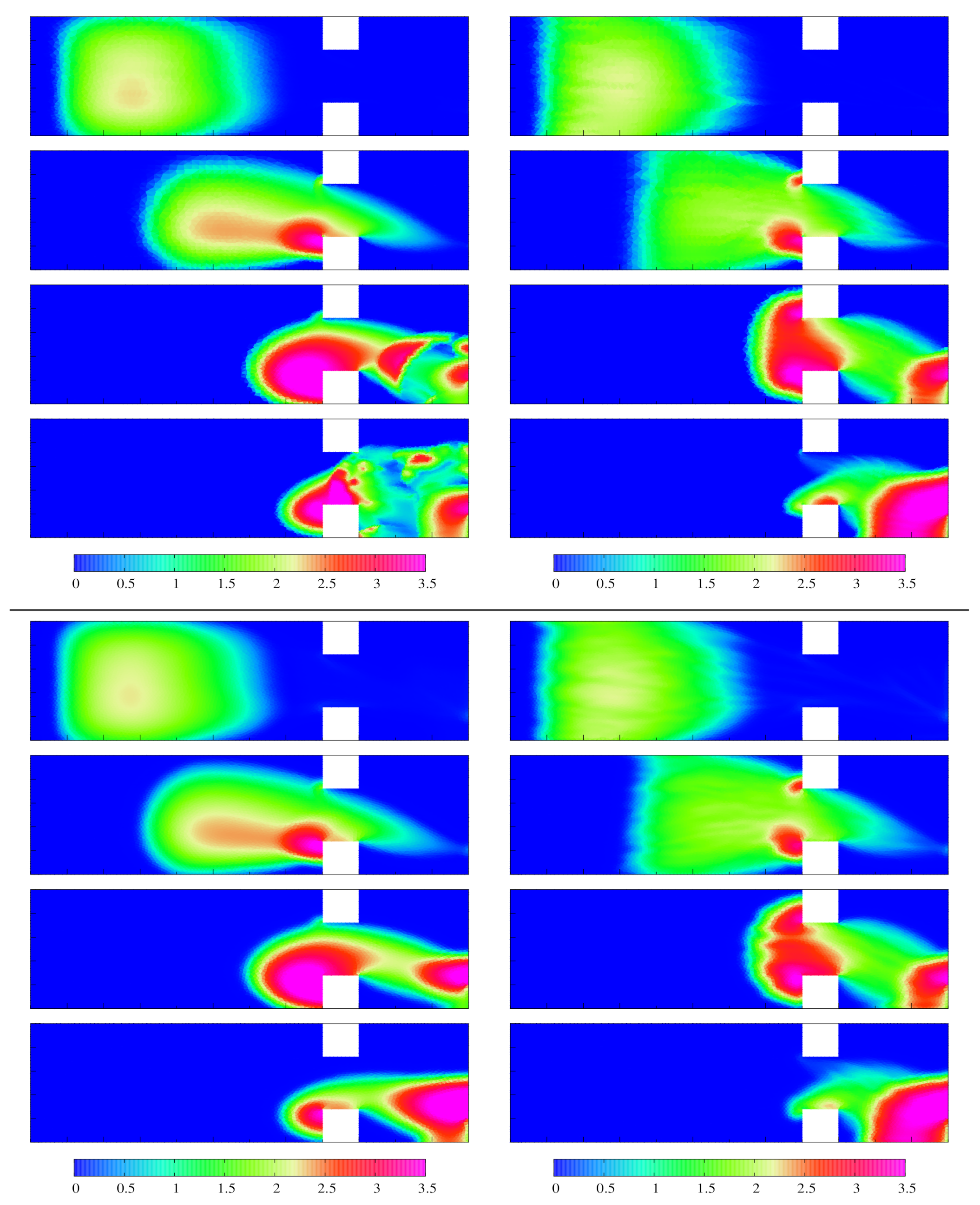
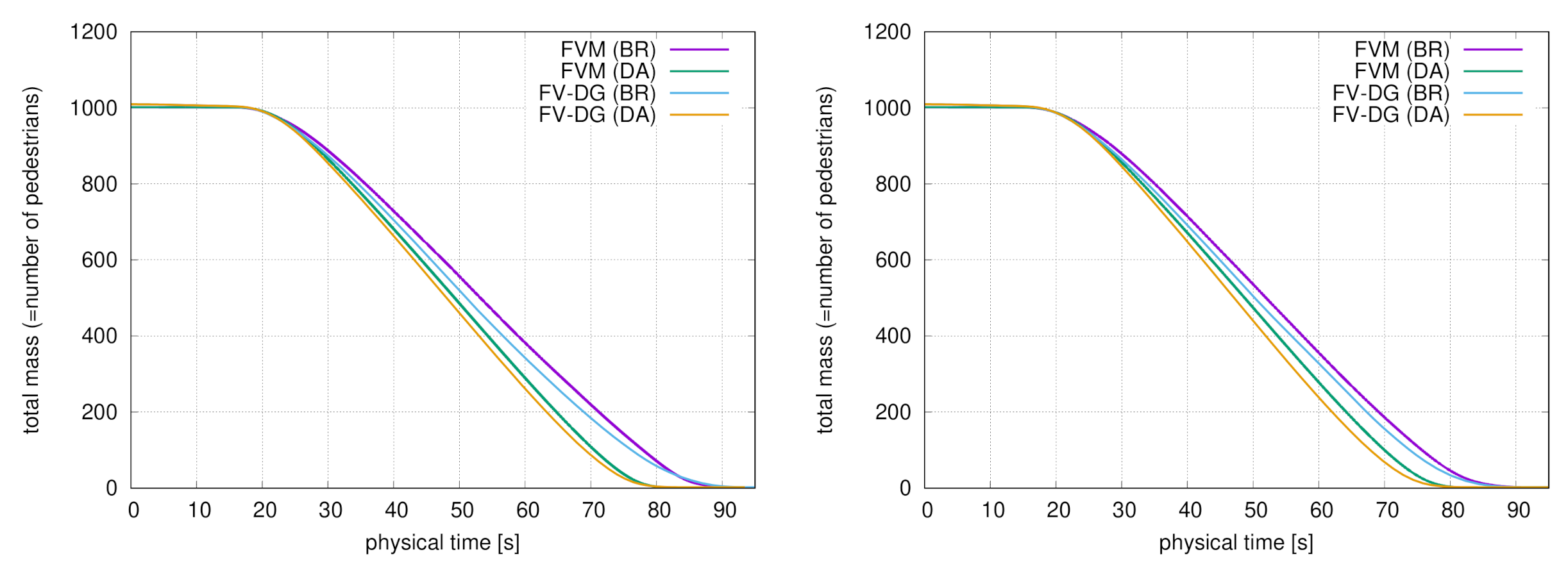
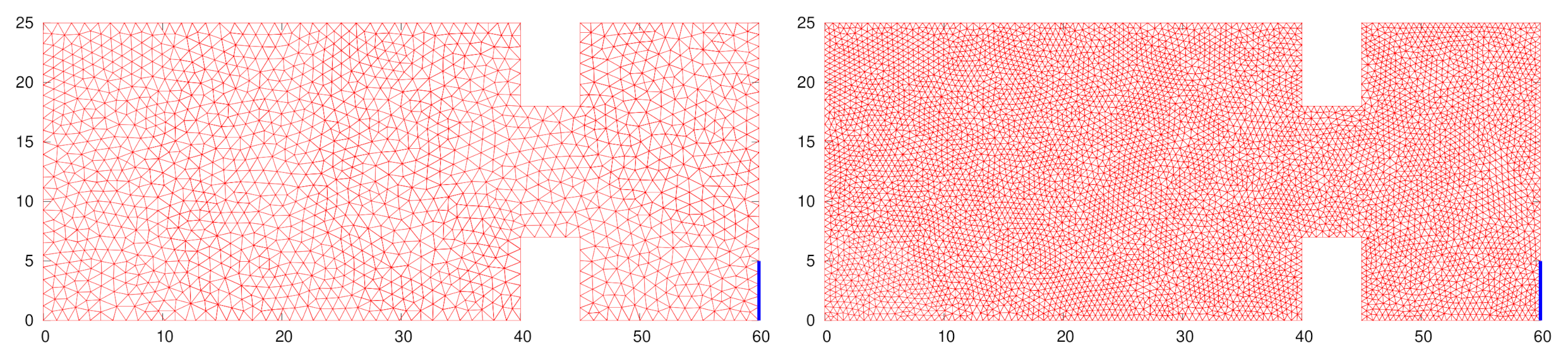
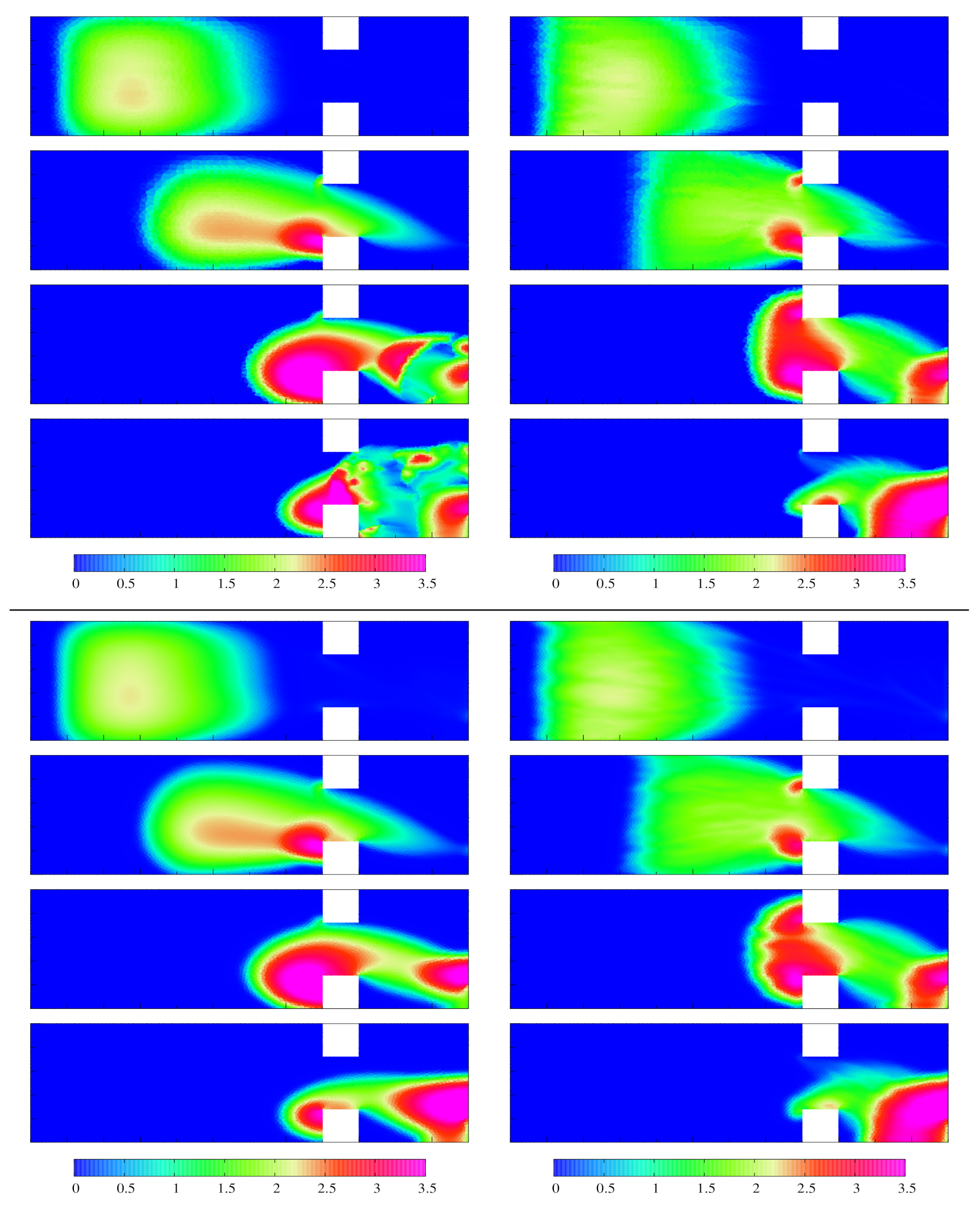
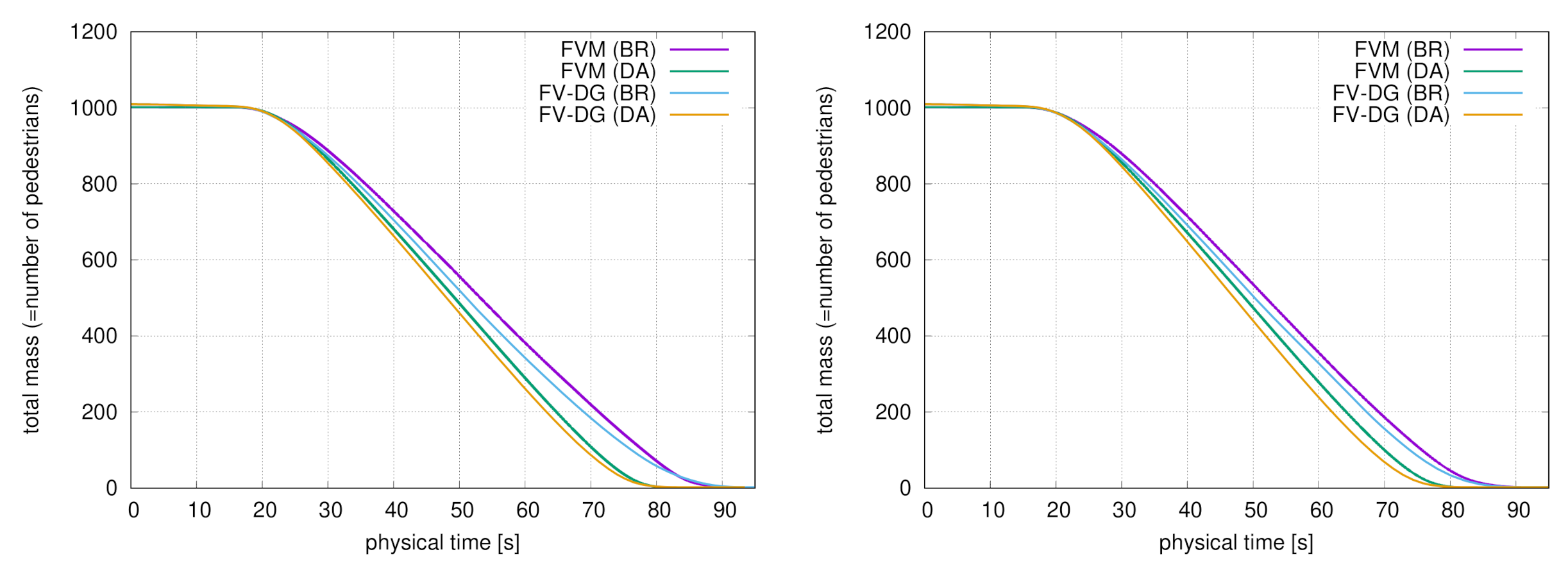
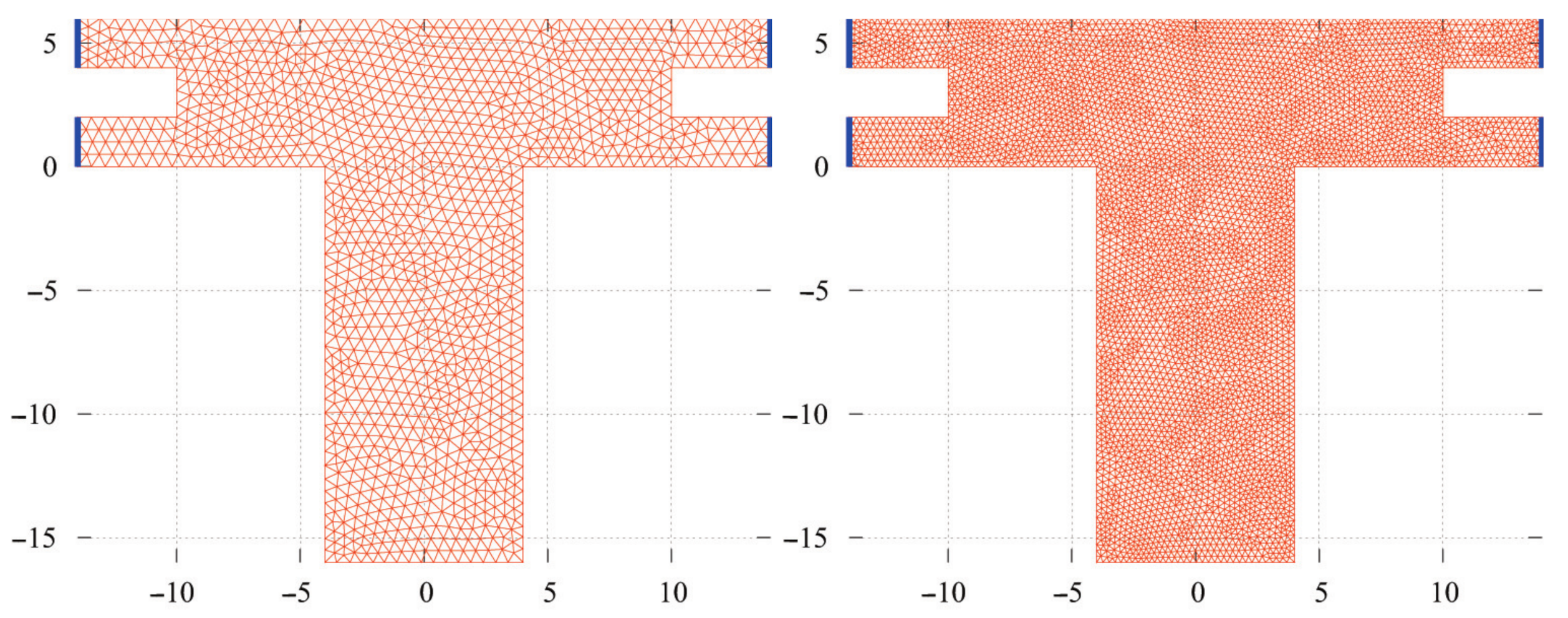
4.3. H-Shape Domain Evacuation
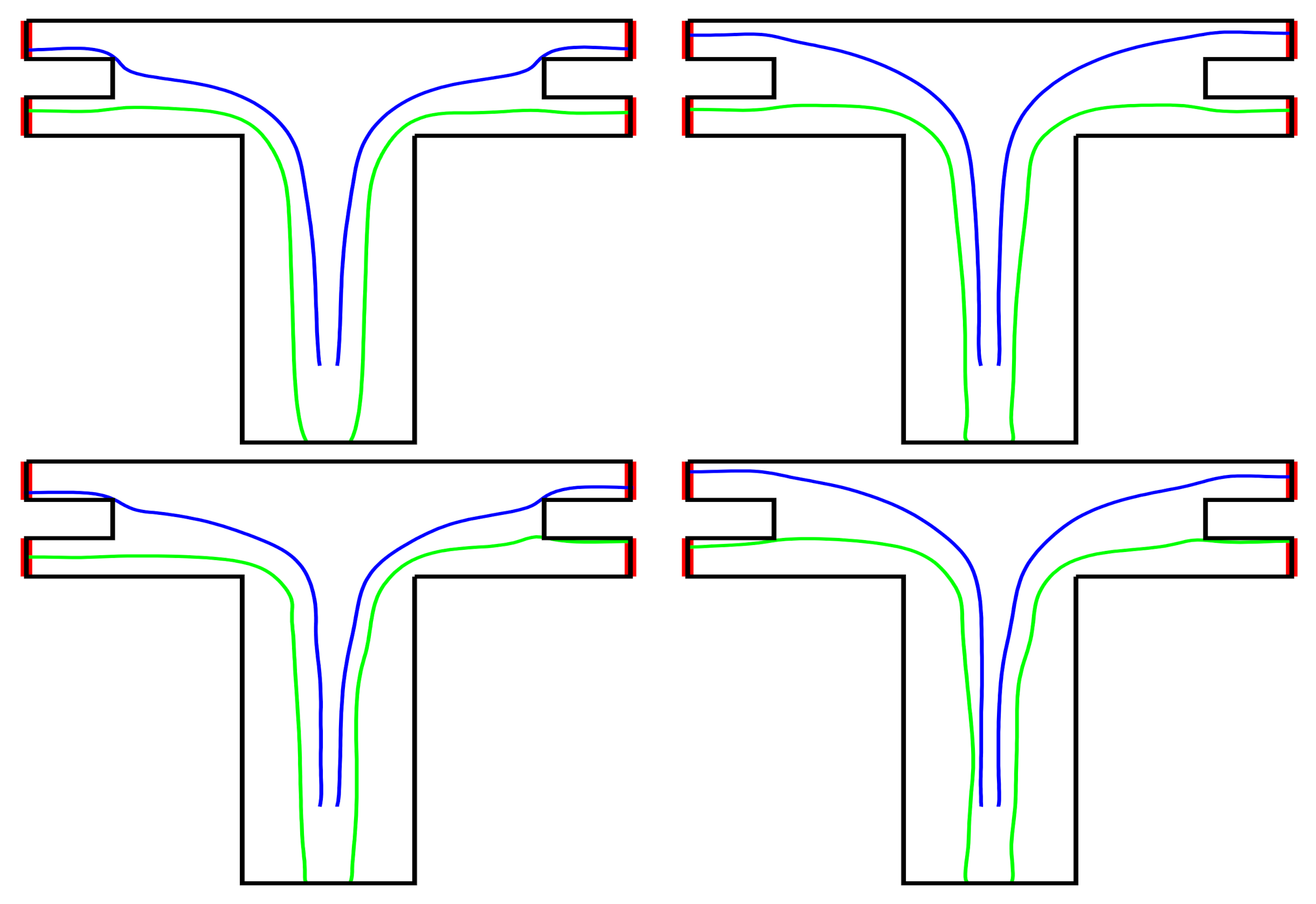
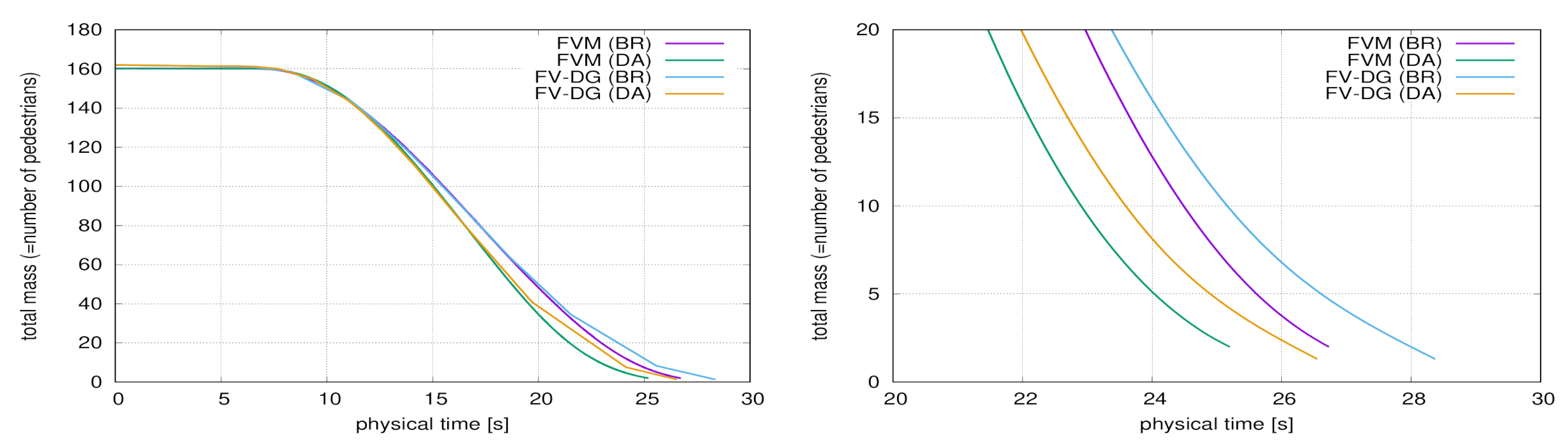
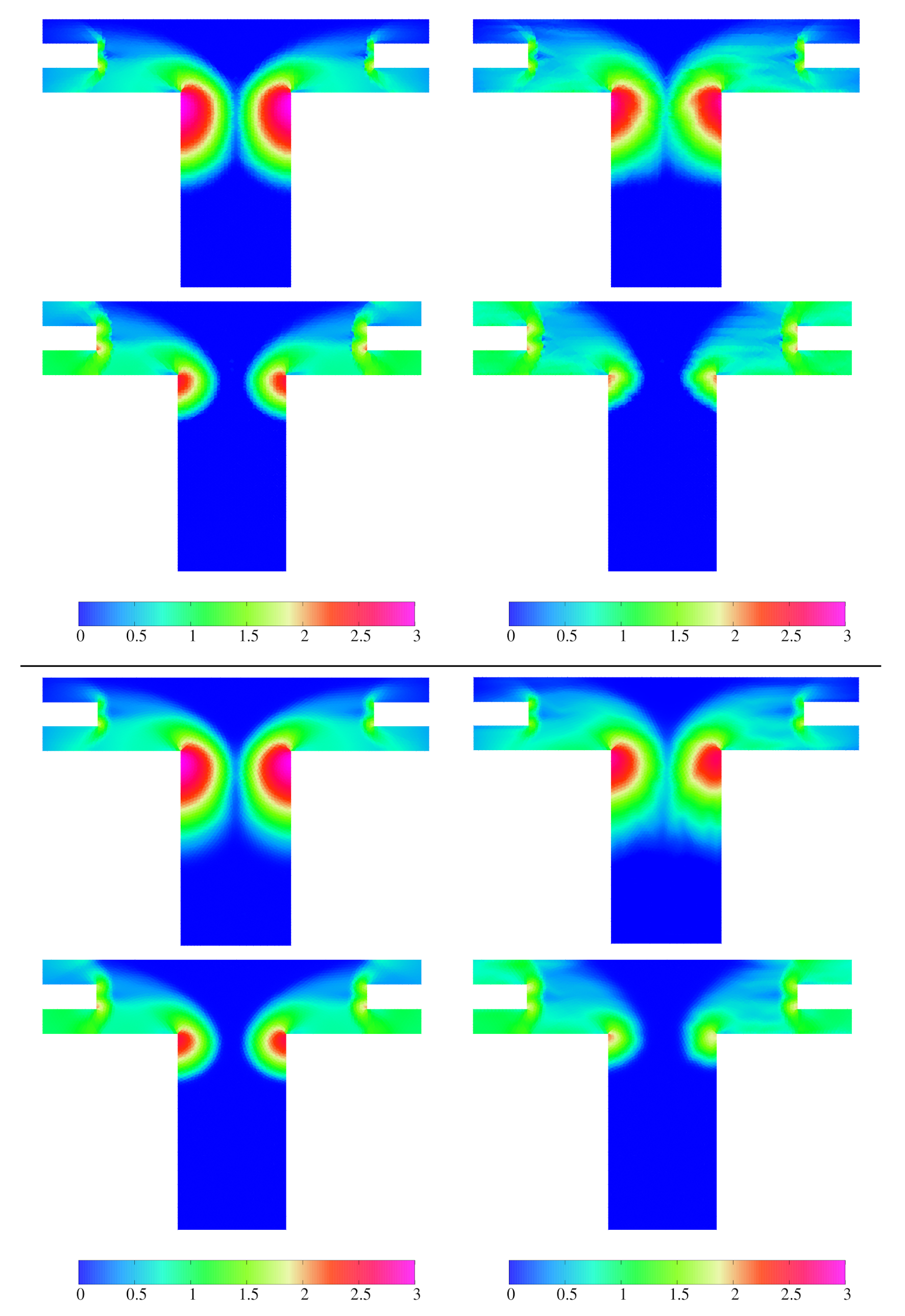
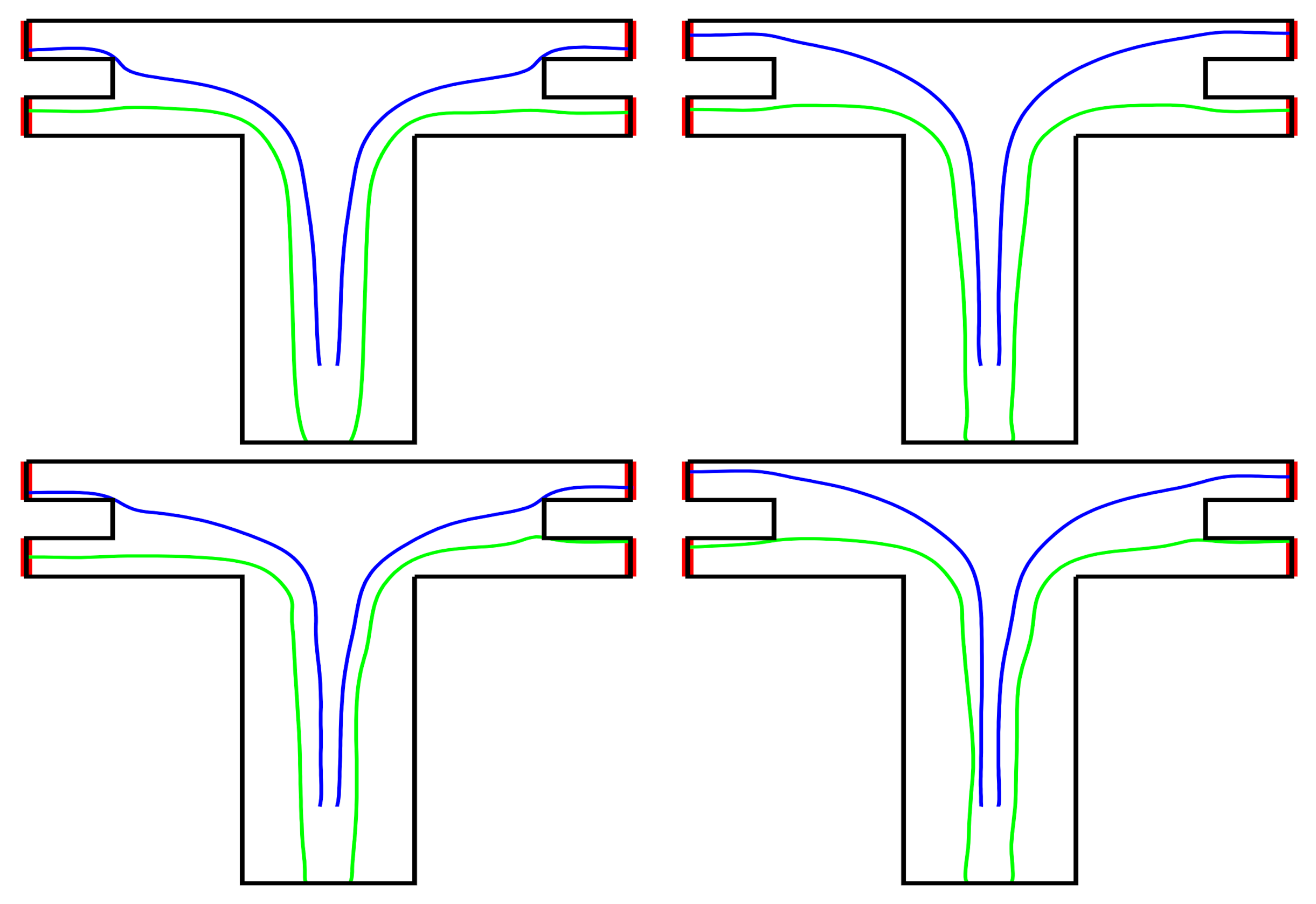
4.4. T-Shape Domain Evacuation
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Liu, R.; Fu, Z.; Schadschneider, A.; Wen, Q.; Chen, J.; Liu, S. Modeling the effect of visibility on upstairs crowd evacuation by a stochastic FFCA model with finer discretization. Phys. A Stat. Mech. Appl. 2019, 531, 121723. [Google Scholar] [CrossRef]
- Fu, Z.; Zhan, X.; Luo, L.; Schadschneider, A.; Chen, J. Modeling fatigue of ascending stair evacuation with modified fine discrete floor field cellular automata. Phys. Lett. A 2019, 383, 1897–1906. [Google Scholar] [CrossRef]
- Twarogowska, M.; Goatin, P.; Duvigneau, R. Macroscopic modeling and simulation of room evacuation. Appl. Math. Model. 2014, 38, 5781–5795. [Google Scholar] [CrossRef]
- Buchmueller, S.; Weidmann, U. Parameters of pedestrians, Pedestrian Traffic and Walking Facilities. IVT Schriftenreihe 2007, 132. [Google Scholar] [CrossRef]
- Bellomo, N.; Marasco, A.; Romano, A. From the modelling of driver’s behavior to hydrodynamics models and problems of traffic flow. Nonlinear Anal. RWA 2002, 3, 339–363. [Google Scholar] [CrossRef]
- Venuti, F.; Bruno, L.; Bellomo, N. Crowd dynamics on a moving platform: Mathematical modelling and application to lively footbridges. Math. Comp. Model. 2007, 45, 252–269. [Google Scholar] [CrossRef]
- Bellomo, N.; Dogbé, C. On the modelling crowd dynamics from scaling to hyperbolic macroscopic models. Math. Model. Methods Appl. Sci. 2008, 18, 1317–1345. [Google Scholar] [CrossRef] [Green Version]
- Dolejší, V.; Felcman, J.; Kubera, P. FV–DG Method for the Pedestrian Flow Problem. Comput. Fluids 2019, 183, 1–15. [Google Scholar] [CrossRef]
- Jiang, Y.; Zhang, P.; Wong, S.; Liu, R. A higher-order macroscopic model for pedestrian flows. Phys. A Stat. Mech. Appl. 2010, 389, 4623–4635. [Google Scholar] [CrossRef]
- Payne, H. Models of Freeway Traffic and Control; Simulation Councils, Incorporated: La Jolla, CA, USA, 1971. [Google Scholar]
- Whitham, G. Linear and Nonlinear Waves; Pure and Applied Mathematics; Wiley: Hoboken, NJ, USA, 1974. [Google Scholar]
- Berres, S.; Ruiz-Baier, R.; Schwandt, H.; Tory, E. An adaptive finite-volume method for a model of two-phase pedestrian flow. Netw. Heterog. Media 2011, 6, 401–423. [Google Scholar] [CrossRef]
- Dridi, M.H. Simulation of high density pedestrian flow: Microscopic model. Open J. Model. Simul. 2015, 3, 81–95. [Google Scholar] [CrossRef] [Green Version]
- Marno, P. Crowded-Macroscopic and Microscopic Models for Pedestrian Dynamics. Ph.D. Thesis, University of Reading, Reading, UK, 2002. [Google Scholar]
- Felcman, J.; Kubera, P. A cellular automaton model for a pedestrian flow problem. Math. Model. Nat. Phenom. 2021, 16, 11. [Google Scholar] [CrossRef]
- Dogbe, C. On the modelling of crowd dynamics by generalized kinetic models. J. Math. Anal. Appl. 2012, 387, 512–532. [Google Scholar] [CrossRef] [Green Version]
- Toro, E.F. Riemann Solvers and Numerical Methods for Fluid Dynamics; Springer: Berlin, Germany, 1997. [Google Scholar]
- Dijkstra, E.W. A note on two problems in connexion with graphs. Numer. Math. 1959, 1, 269–271. [Google Scholar] [CrossRef] [Green Version]
- Cormen, T.H.; Leiserson, C.E.; Rivest, R.L.; Stein, C. Introduction to Algorithms, 2nd ed.; The MIT Press: Cambridge, MA, USA, 2001. [Google Scholar]
- Bornemann, F.; Rasch, C. Finite-element Discretization of Static Hamilton-Jacobi Equations based on a Local Variational Principle. Comput. Vis. Sci. 2006, 9, 57–69. [Google Scholar] [CrossRef] [Green Version]
- Felcman, J.; Dolejší, V.; Kubera, P. Discontinuous Galerkin Method for the Pedestrian Flow Problem. In ICNAAM 2017 AIP Conference Proceedings 1978:1; Simos, T.E., Tsitouras, C., Eds.; American Institute of Physics: Melville, NY, USA, 2018; pp. 0300191–0300194. [Google Scholar] [CrossRef]
- Kubera, P.; Felcman, J. On a numerical flux for the pedestrian flow equations. J. Appl. Math. Stat. Inform. 2015, 11, 79–96. [Google Scholar] [CrossRef] [Green Version]
- Dolejší, V.; Feistauer, M. Discontinuous Galerkin Method; Springer: New York, NY, USA, 2015. [Google Scholar]
- Petrášová, T. Application of the Dijkstra’s Algorithm in the Pedestrian Flow Problem. Bachelor’s Thesis, Charles University in Prague, Prague, Czech Republic, 2016. [Google Scholar]
- Deuflhard, P. Newton Methods for Nonlinear Problems; Springer Series in Computational Mathematics; Springer: Berlin/Heidelberg, Germany, 2004; Volume 35. [Google Scholar]
- Dolejší, V.; Roskovec, F.; Vlasák, M. Residual based error estimates for the space-time discontinuous Galerkin method applied to the compressible flows. Comput. Fluids 2015, 117, 304–324. [Google Scholar] [CrossRef]
- Felcman, J.; Kubera, P. On the Eikonal Equation in the Pedestrian Flow Problem. In ICNAAM 2016 AIP Conference Proceedings 1863:1; Simos, T.E., Tsitouras, C., Eds.; American Institute of Physics: Melville, NY, USA, 2017; pp. 5600241–5600244. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| [s] | [s] | [s] | [s] | ||
|---|---|---|---|---|---|
| 1114 | 35.0 | 35.1 | 1126 | 35.2 | 36.2 |
| 2148 | 34.7 | 34.7 | 2132 | 35.2 | 36.1 |
| 4610 | 34.9 | 34.7 | 4627 | 35.0 | 35.5 |
| 9056 | 34.8 | 34.7 | 9082 | 34.8 | 35.4 |
| [s] | [s] | [s] | [s] | ||
|---|---|---|---|---|---|
| 1622 | 34.5 | 34.9 | 1653 | 35.0 | 35.6 |
| 2653 | 34.6 | 34.5 | 2616 | 34.9 | 35.5 |
| 7115 | 34.7 | 34.5 | 7084 | 34.9 | 35.1 |
| 11,660 | 35.0 | 34.6 | 11,636 | 34.7 | 35.0 |
| [s] | [s] | [s] | [s] | ||
|---|---|---|---|---|---|
| 2994 | 90.8 | 81.0 | 2941 | 87.5 | 79.1 |
| 12,835 | 90.5 | 81.0 | 12,742 | 90.5 | 80.0 |
| [s] | [s] | [s] | [s] | ||
|---|---|---|---|---|---|
| 2678 | 26.7 | 25.4 | 2578 | 28.1 | 27.9 |
| 10,310 | 26.7 | 25.2 | 10,848 | 28.4 | 26.6 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kubera, P.; Felcman, J. On the Verification of the Pedestrian Evacuation Model. Mathematics 2021, 9, 1525. https://doi.org/10.3390/math9131525
Kubera P, Felcman J. On the Verification of the Pedestrian Evacuation Model. Mathematics. 2021; 9(13):1525. https://doi.org/10.3390/math9131525
Chicago/Turabian StyleKubera, Petr, and Jiří Felcman. 2021. "On the Verification of the Pedestrian Evacuation Model" Mathematics 9, no. 13: 1525. https://doi.org/10.3390/math9131525
APA StyleKubera, P., & Felcman, J. (2021). On the Verification of the Pedestrian Evacuation Model. Mathematics, 9(13), 1525. https://doi.org/10.3390/math9131525