1. Introduction
Fault diagnosis is an important research content in the engineering industry, and its applications in vehicle detection [
1], high-speed train system diagnosis [
2,
3], and intelligent machinery diagnosis [
4] have received a lot of attention. Current research on fault diagnosis mainly includes machine learning and application of diagnostic methods. Some traditional machine learning methods, such as the Gaussian mixture model, support vector machine (SVM), have been widely used in the field of fault diagnosis. A large amount of machinery health information is easier to collect, but it also reduces the efficiency of detection and diagnosis. The data-driven model improves the efficiency of fault diagnosis and is widely used in this field. For example, in the literature [
5], a differentiable neural network structure search based on pruning and multi-objective optimization is used for mechanical fault diagnosis, and the multi-scale fuzzy entropy technology based on Euclidean distance is applied to fault diagnosis of industrial system [
6].
The above research can effectively improve the efficiency of fault diagnosis, but it is also an important research content for the processing of a large amount of collected information. In complex systems, multi-source information fusion has the advantage of improving accuracy and credibility [
7], so it has been widely used. However, affected by the uncertainty of the real world, multi-sensor information sources are considered to be uncertain [
8]. For uncertain information, information entropy [
9], probability theory [
10], rough set theory [
11,
12], Dempster–Shafer evidence theory [
13,
14], belief function [
15,
16], and other methods [
17,
18] have been proposed to deal with uncertain information. The Dempster–Shafer evidence theory is a type of inexact probability [
19], as an uncertain information processing and data fusion tool, it is widely used in pattern recognition [
20,
21,
22], multi-attribute decision-making [
23,
24], image processing [
25] and other fields [
26,
27,
28,
29]. Under the Dempster–Shafer evidence theory framework, many uncertain information processing problems can be solved by measuring information uncertainty and using Dempster’s combination rule for fusion, but there are still some open issues that require further research and breakthrough [
30,
31,
32,
33].
When studying uncertain information measurement methods, many literatures have followed Klir and Yuan’s classification of information uncertainty: fuzziness and ambiguity [
34]. However, with the discovery of research, there is still a new type of uncertain information under the open world assumption, namely incomplete information. This is a type of uncertain information generated by the open world characteristics introduced by the incomplete frame of discernment, new elements, unknown targets, etc. Most of the existing researches focus on the closed world assumption, and it is difficult to solve the problem of incomplete information under the open world assumption.
The re-proposition of the generalized evidence theory [
35,
36,
37] has caused more researchers to pay attention to the studies within the scope of the open world assumption model [
38,
39,
40]. In order to effectively solve the problem of incomplete information processing and fusion under the open world assumption, this paper proposes a new data fusion method, which uses the extension to the Deng entropy in the open world assumption (EDEOW) proposed by Tang et al. [
41] to measure the uncertainty of evidence. Combined with the calculation method of the negation of basic probability assignment (BPA) proposed by Yin et al. [
42], to obtain the two uncertainties of the original BPA and the negation of BPA of the evidence modeling. The two uncertainties were added as the final uncertainty of the evidence, and the data were modified based on this uncertainty. Such processing considers more uncertainty, which is helpful for improving the accuracy of information processing and reducing information loss. After that, the proposed method uses the generalized combination rule (GCR) [
37] under the open world assumption to fuse the modified data. Finally, the method is applied to an example of fault diagnosis to provide decision support for engineers.
The rest of this paper is organized as follows. The preparatory work for the proposed method in this paper are introduced in the second section. The third section proposes a new method based on negation of BPA, EDEOW, and GCR to solve the problem of data fusion in fault diagnosis applications in the open world. The fourth section uses the proposed method to solve a fault diagnosis example. The fifth section applies this method to practical problems in fault diagnosis. The sixth section gives the conclusion of this paper.
3. An Improved Method for Incomplete Information Fusion in Fault Diagnosis
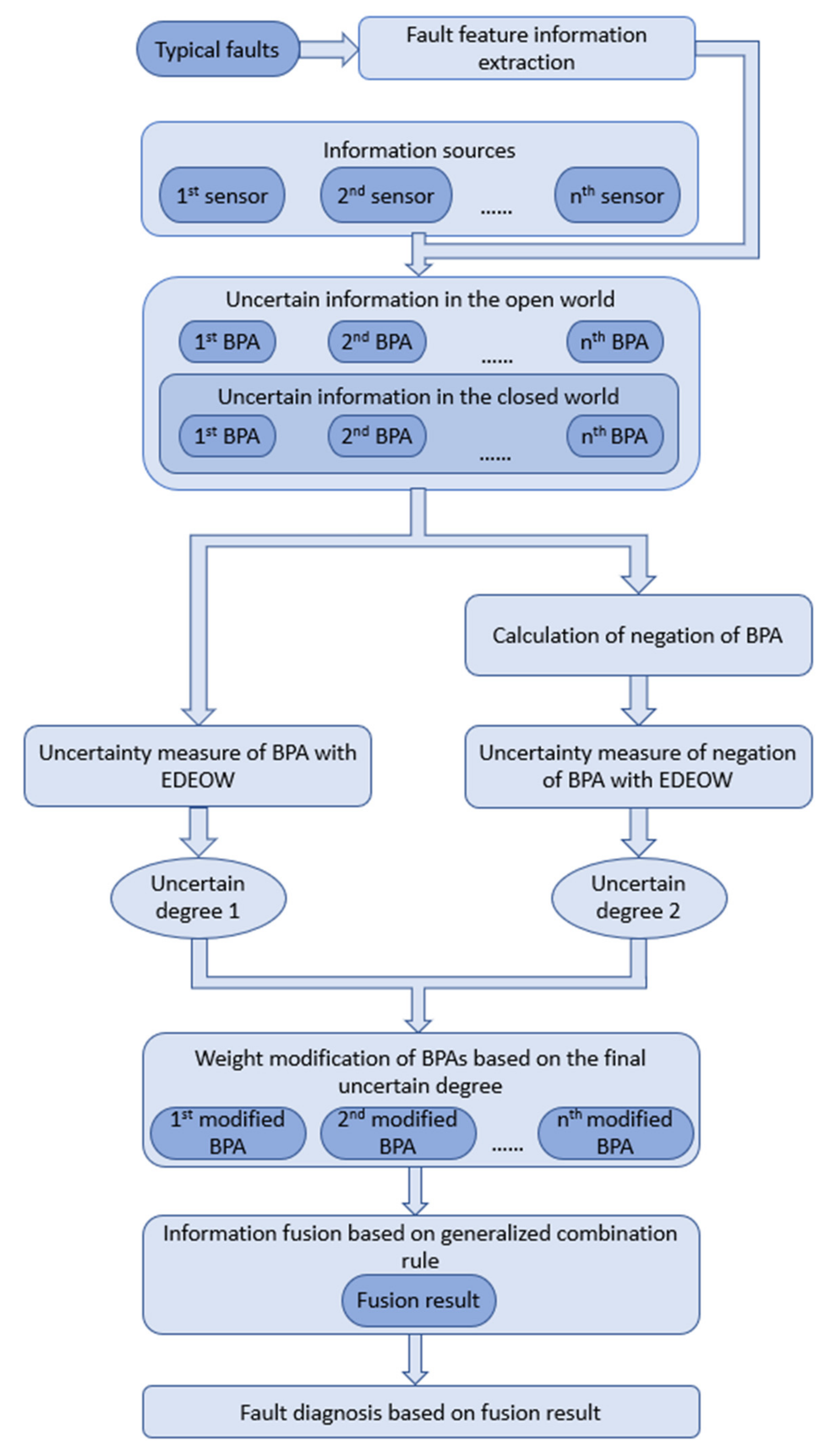
For the problems in the open world, traditional information entropy and DS classical combination rules are difficult to provide solutions. This section proposes a conflict data fusion method based on EDEOW to measure the uncertainty information, obtain more uncertain information through negation of BPA to improve the accuracy of information processing, and adopt GCR for fusion. In
Figure 1, a fault diagnosis method framework based on EDEOW, negation of BPA, and GCR in the open world is designed.
The detailed steps of uncertain information processing and fusion are described as follows:
Step 1: fault feature extraction and sensor evidence modeling: in multiple fault modes, for each fault feature extracted, evidence modeling is carried out based on the information collected by the sensor. For complete information, the evidence modeling under the open world assumption is the same as that in the closed world. As for incomplete information, the empty set is used to represent it under the open world assumption, and its mass function is non-zero.
Step 2: calculation of negation BPA: before data fusion, evidence preprocessing will make the fusion result more accurate. Considering the limitations of data, this paper adopts the method in [
42] to calculate the negation of BPA to obtain more uncertain information. For each BOE obtained by modeling, negate it with the following formula:
Step 3: uncertainty calculation based on EDEOW: this paper uses the Deng entropy to measure the uncertainty of the data. Since the original Deng entropy is only applicable to the uncertainty measurement in the closed world, this paper adopts the extension to the Deng entropy in the open world assumption [
41] proposed by Tang et al., and uses Equation (10) to calculate the uncertainty of BPA and negation of BPA.
Step 4: data modification: by summing the two uncertainties of each group of evidence calculated in step 3, the final uncertainty
obtained can be used to calculate the weight of the evidence through the following formula:
Based on the weight of each set of data, the calculation method of modified BPA is calculated in the same way as in the closed world, where m
i(A) is the mass function value obtained by proposition A through sensor data modeling:
Step 5: data fusion based on GCR: considering that the classical Dempster–Shafer theory is not applicable to the problem under the open world assumption, this paper uses the extension rule of Dempster’s combination rule proposed by Deng, namely GCR, to fuse the revised data:
For proposition A in BOE, the result is obtained through (m − 1) times of fusion:
6. Conclusions
In order to solve the problem of incomplete information under the open world assumption, this paper proposes an incomplete information processing method based on negation of BPA, EDEOW, and GCR. In this paper, the negation of the BPA calculation method proposed by Yin et al. is adopted to obtain more uncertain information, thus reducing information loss and improving information processing accuracy. An extension to the Deng entropy in the open world assumption is an extended uncertainty measurement method based on belief structure. The method proposed in this paper uses EDEOW to measure the uncertainty of original BPA and negation of BPA. The two groups of measured uncertainties are added together as the final uncertainty. Based on this uncertainty, the weight of evidence is calculated and the data are modified, and the modification results are more accurate. The generalized combination rule is an extension of the Dempster–Shafer theory in the open world. It solves the problem that the classical combination rule of the Dempster–Shafer evidence theory cannot be applied to the open world assumption. It is used for the final fusion of the modified data in the proposed method. Compared with other methods, the new information processing strategy constructed in this paper considers more uncertainties and makes the measurement results more accurate. At the same time, the EDEOW and GCR used in this method are both applicable for the problems under the open world assumption, effectively making up for the shortcomings of traditional methods that are difficult to solve the problem of incomplete information. Finally, this method is applied to the problem of fault diagnosis, which is more conducive to the decision-making of engineers in practical applications.







{kind=link}
{kind=link}
{kind=link}