Optimal Disturbance Observer Design for High Tracking Performance in Motion Control Systems



Abstract
1. Introduction
- The proposed method guarantees the stability of the closed-loop system because it provides optimal control based on the Lyapunov stability.
- It does not require plant inverse dynamics.
- Stabilizing Q filters are not required.
- The relative degree does not need to be considered. Therefore, additional filters to compensate for the relative degree are not necessary.
- Compensators based on all-pass filters are not required for non-minimum phase plants.
- Both wide and narrow band disturbances can be attenuated.
- Because this method provides more stability margins, it can reduce a sensitivity peak.
2. Optimal Disturbance Observer Design
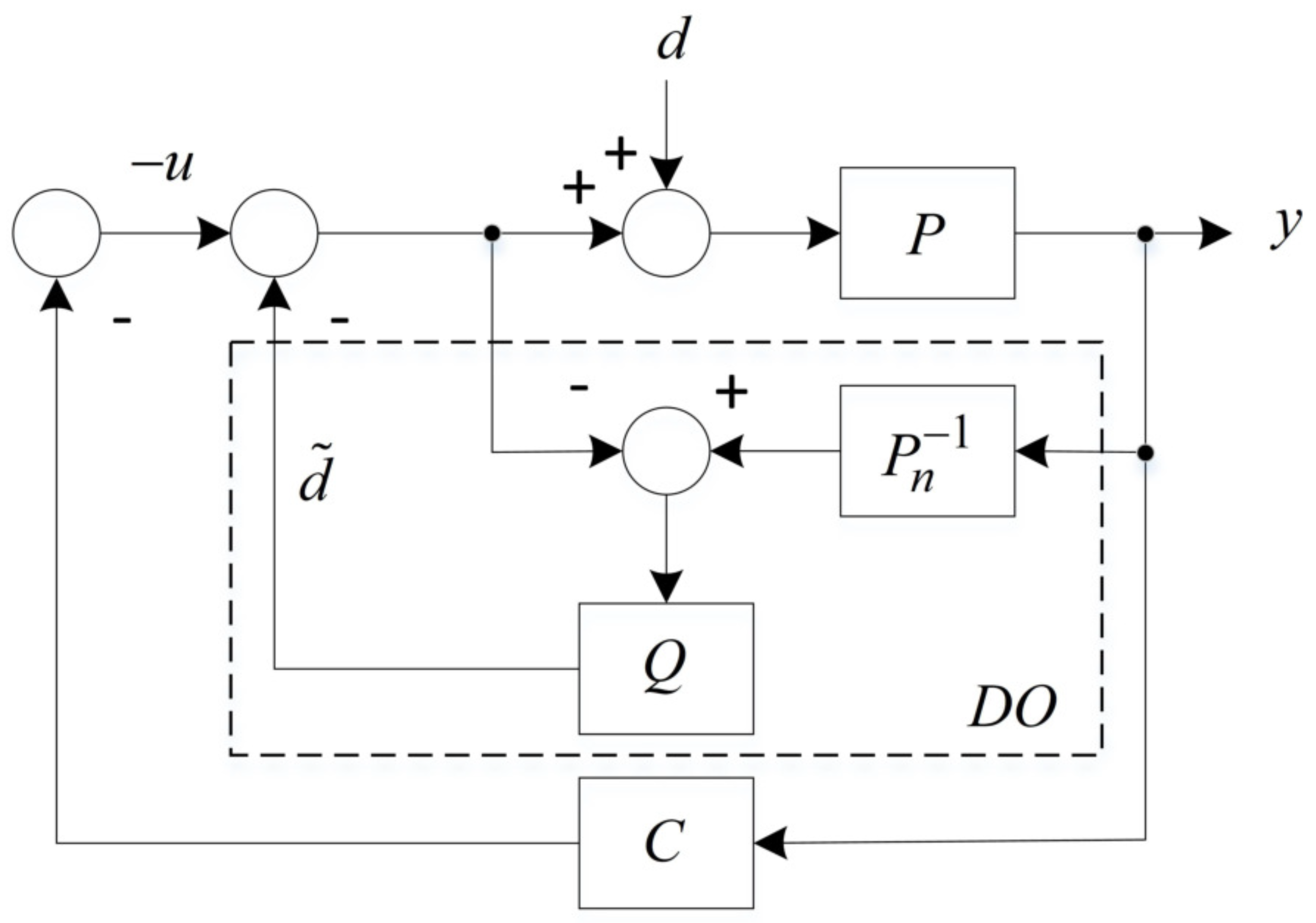
2.1. Conventional Disturbance Observer
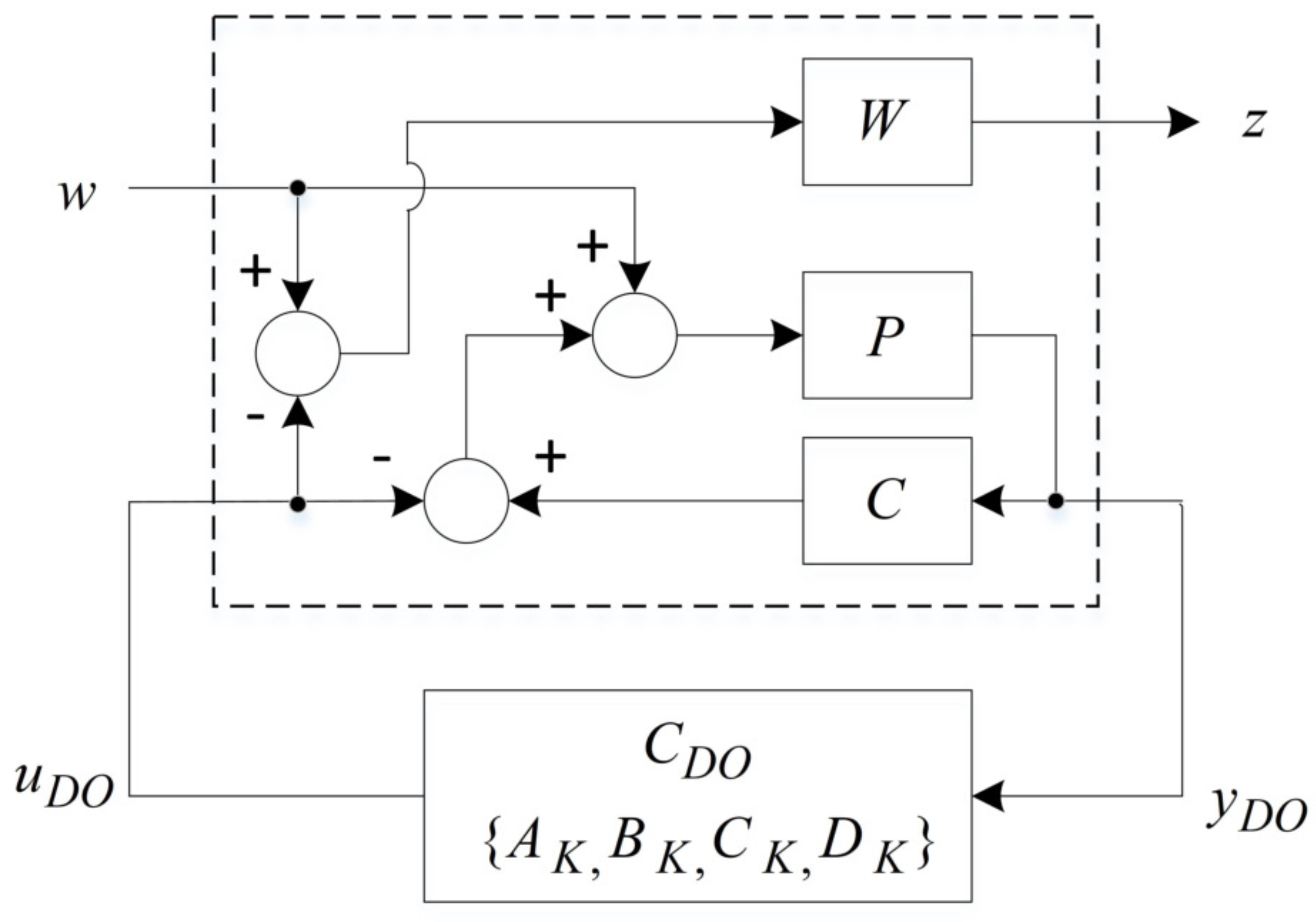
2.2. Design Framework for Optimal Disturbance Observer
2.3. Optimal Disturbance Observer Design
- minimize γ subject to LMIswhere , and Y are variables. means that X is positive definite and * denotes an ellipsis for terms induced by a symmetric matrix. Then, an optimal controller is given bywhere U and V are any nonsingular matrices satisfying .
3. Application Example
3.1. Case 1
3.2. Case 2
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| DSA | dynamic signal analyzer |
| DO | Disturbance observer |
| GM | gain margin |
| LDV | laser Doppler vibrometer |
| OIS | optical image stabilization |
| PES | Position error signal |
| PM | Phase margin |
References
- Ohnishi, K. A New Servo Method in Mechatronics. Trans. Jpn. Soc. Electr. Eng. D 1987, 177, 83–86. [Google Scholar]
- Yan, Y.; Yang, J.; Sun, Z.; Zhang, C.; Li, S.; Yu, H. Robust Speed Regulation for PMSM Servo System With Multiple Sources of Disturbances via an Augmented Disturbance Observer. IEEE/ASME Trans. Mechatron. 2018, 23, 769–780. [Google Scholar] [CrossRef]
- Kim, W.; Chen, X.; Lee, Y.; Chung, C.C.; Tomizuka, M. Discrete-time Nonlinear Damping Backstepping Control with Observers for Rejection of Low and High Frequency Disturbances. Mech. Syst. Signal Process. 2018, 4, 436–448. [Google Scholar] [CrossRef]
- Rafaq, M.S.; Nguyen, A.T.; Choi, H.H.; Jung, J.-W. A Robust High-Order Disturbance Observer Design for SDRE-Based Suboptimal Speed Controller of Interior PMSM Drives. IEEE Access 2019, 7, 165671–165683. [Google Scholar] [CrossRef]
- Jo, N.H.; Jeon, C.; Shim, H. Noise Reduction Disturbance Observer for Disturbance Attenuation and Noise Suppression. IEEE Trans. Ind. Electron. 2017, 64, 1381–1391. [Google Scholar] [CrossRef]
- Suh, S. Q filter design of disturbance observer for selective disturbance rejection. J. Inst. Control. Robot. Syst. 2019, 25, 105–110. [Google Scholar] [CrossRef]
- Li, H.; Ning, X.; Han, B. Composite Decoupling Control of Gimbal Servo System in Double-Gimbaled Variable Speed CMG Via Disturbance Observer. IEEE/ASME Trans. Mechatron. 2017, 22, 312–320. [Google Scholar] [CrossRef]
- Wang, F.; Wang, R.; Liu, E.; Zhang, W. Stabilization Control Mothed for Two-Axis Inertially Stabilized Platform Based on Active Disturbance Rejection Control With Noise Reduction Disturbance Observer. IEEE Access 2019, 7, 99521–99529. [Google Scholar] [CrossRef]
- Ding, Z. Consensus Disturbance Rejection With Disturbance Observers. IEEE Trans. Ind. Electron. 2015, 62, 5829–5837. [Google Scholar] [CrossRef]
- Ahmed, N.; Chen, M.; Shao, S. Disturbance Observer Based Tracking Control of Quadrotor With High-Order Disturbances. IEEE Access 2020, 8, 2169–3536. [Google Scholar] [CrossRef]
- Ullah, I.; Pe, H.-L. Fixed Time Disturbance Observer Based Sliding Mode Control for a Miniature Unmanned Helicopter Hover Operations in Presence of External Disturbances. IEEE Access 2020, 8, 73173–73181. [Google Scholar] [CrossRef]
- Chwa, D. Robust Nonlinear Disturbance Observer Based Adaptive Guidance Law Against Uncertainties in Missile Dynamics and Target Maneuver. IEEE Trans. Aerosp. Electron. Syst. 2018, 54, 1739–1749. [Google Scholar] [CrossRef]
- Zhou, L.; Che, Z.; Yang, C. Disturbance Observer-Based Integral Sliding Mode Control for Singularly Perturbed Systems With Mismatched Disturbances. IEEE Access 2018, 6, 9854–9861. [Google Scholar] [CrossRef]
- Elkayam, M.; Kolesnik, S.; Kuperman, A. Guidelines to Classical Frequency-Domain Disturbance Observer Redesign for Enhanced Rejection of Periodic Uncertainties and Disturbances. IEEE Trans. Power Electron. 2019, 34, 3986–3995. [Google Scholar] [CrossRef]
- Ali, M.; Yaqoob, M.; Cao, L.; Loo, K.H. Disturbance-Observer-Based DC-Bus Voltage Control for Ripple Mitigation and Improved Dynamic Response in Two-Stage Single-Phase Inverter System. IEEE Trans. Ind. Electron. 2019, 66, 6836–6845. [Google Scholar] [CrossRef]
- Li, M.; Shi, W.; Wei, J.; Fang, J.; Guo, K.; Zhang, Q. Parallel Velocity Control of an Electro-Hydraulic Actuator With Dual Disturbance Observers. IEEE Access 2019, 7, 56631–56641. [Google Scholar] [CrossRef]
- Maeda, G.J.; Manchester, I.R.; Rye, D.C. Combined ILC and Disturbance Observer for the Rejection of Near-Repetitive Disturbances, With Application to Excavation. IEEE Trans. Control. Syst. Technol. 2015, 23, 1754–1769. [Google Scholar] [CrossRef]
- Kim, W.; Shin, D.; Won, D.; Chung, C.C. Disturbance Observer Based Position Tracking Controller in the Presence of Biased Sinusoidal Disturbance for Electro-hydraulic Actuators. IEEE Trans. Control. Syst. Technol. 2013, 21, 2290–2298. [Google Scholar] [CrossRef]
- Boukhnifer, M.; Ferreira, A. H∞ Loop Shaping Bilateral Controller for a Two-Fingered Tele-Micromanipulation System. IEEE Trans. Control. Syst. Technol. 2007, 15, 891–905. [Google Scholar] [CrossRef]
- Helfrich, B.E.; Lee, C.; Bristow, D.A.; Xiao, X.H.; Dong, J.; Alleyne, A.G.; Salapak, S.M.; Ferreir, P.M. Combined H∞-Feedback Control and Iterative Learning Control Design With Application to Nanopositioning Systems. IEEE Trans. Control. Syst. Technol. 2010, 18, 336–351. [Google Scholar] [CrossRef]
- Sato, M.; Toda, M. Robust Motion Control of an Oscillatory-Base Manipulator in a Global Coordinate System. IEEE Trans. Ind. Electron. 2015, 62, 1163–1174. [Google Scholar] [CrossRef]
- Bhaban, S.; Talukdar, S.; Li, M.; Hays, T.; Seiler, P.; Salapaka, M. Single Molecule Studies Enabled by Model-Based Controller Design. IEEE/ASME Trans. Mechatron. 2018, 23, 1532–1542. [Google Scholar] [CrossRef] [PubMed]
- Zhang, X.; Koo, B.; Salapaka, S.M.; Dong, J.; Ferreira, P.M. Robust Control of a MEMS Probing Device. IEEE/ASME Trans. Mechatronics 2014, 19, 100–108. [Google Scholar] [CrossRef]
- Yun, J.N.; Su, J. Robust Disturbance Observer for Two-Inertia System. IEEE Trans. Ind. Electron. 2013, 60, 2700–2710. [Google Scholar] [CrossRef]
- Zhong, T.; Nagamune, R.; Yuen, A.; Tang, W. Online Estimation and Control for Feed Drive Systems With Unmeasurable Parameter Variations. IEEE Acess 2020, 8, 33966–33976. [Google Scholar] [CrossRef]
- Yun, J.N.; Su, J.-B. Design of a Disturbance Observer for a Two-Link Manipulator With Flexible Joints. IEEE Trans. Control. Syst. Technol. 2014, 22, 809–815. [Google Scholar] [CrossRef]
- Wang, L.; Su, J.; Xiang, G. Robust Motion Control System Design With Scheduled Disturbance Observer. IEEE Trans. Ind. Electron. 2016, 63, 6519–6529. [Google Scholar] [CrossRef]
- Gassmann, V.; Knittel, D.; Pagill, P.R. Fixed-Order Tension Control in the Unwinding Section of a Web Handling System Using a Pendulum Dancer. IEEE Trans. Control. Syst. Technol. 2012, 20, 173–180. [Google Scholar] [CrossRef]
- Huard, B.; Grossard, M.; Moreau, S.; Poinot, T. Sensorless Force/Position Control of a Single-Acting Actuator Applied to Compliant Object Interaction. IEEE Trans. Ind. Electron. 2015, 62, 3651–3661. [Google Scholar]
- Chen, C.-S.; Chen, L.-Y. Robust Cross-Coupling Synchronous Control by Shaping Position Commands in Multiaxes System. IEEE Trans. Ind. Electron. 2012, 59, 4761–4773. [Google Scholar] [CrossRef]
- Noshadi, A.; Shi, J.; Lee, W.S.; Shi, P.; Kalman, A. System Identification and Robust Control of Multi-Input Multi-Output Active Magnetic Bearing Systems. IEEE Trans. Control. Syst. Technol. 2016, 24, 1227–1239. [Google Scholar] [CrossRef]
- Chen, X.; Yang, T.; Chen, X.; Zhou, K. A Generic Model-Based Advanced Control of Electric Power-Assisted Steering Systems. IEEE Trans. Control. Syst. Technol. 2008, 16, 1289–1300. [Google Scholar] [CrossRef]
- Nie, J.; Conway, R.; Horowitz, R. Optimal H∞ Control for Linear Periodically Time-Varying Systems in Hard Disk Drives. IEEE/ASME Trans. Mechatron. 2013, 18, 212–220. [Google Scholar] [CrossRef]
- Lyu, X.; Zhou, J.; Gu, H.; Li, Z.; Shen, S.; Zhang, F. Disturbance Observer Based Hovering Control of Quadrotor Tail-Sitter VTOL UAVs Using H∞ Synthesis. IEEE Robot. Autom. Lett. 2018, 3, 2910–2917. [Google Scholar] [CrossRef]
- Lyu, X.; Zheng, M.; Zhang, F. H∞ Based Disturbance Observer Design for Non-minimum Phase Systems with Application to UAV Attitude Control. In Proceedings of the Annual American Control Conference, Milwaukee, WI, USA, 27–29 June 2018; pp. 3683–3689. [Google Scholar]
- Majumder, S.D. Flight optimisation of missile using linear matrix inequality (LMI) approach. J. Eng. 2020, 2020, 247–250. [Google Scholar] [CrossRef]
- Boyd, S.; Ghaoui, L.E.; Feron, F.; Balakrishnan, V. Linear Matrix Inequalities in System and Control Theory; SIAM: Philadelphia, PA, USA, 1994. [Google Scholar]
- Oliveira, C.D.; Geromel, J.C.; Bernussou, J. An LMI Optimization Approach to Multiobjective Controller Design for Discrete-Time Systems. In Proceedings of the 38th Conference on Decision and Control, Phoenix, AZ, USA, 7–10 December 1999; Volume 4, pp. 3611–3616. [Google Scholar]
- Skelton, E.; Iwasaki, T.; Grigoriadis, K. A Unified Algebraic Approach to Linear Control Design; Taylor & Francis: Abingdon, UK, 1997. [Google Scholar]
- Suh, S. Discrete-time controller design to attenuate effects of external disturbances. Microsyst. Technol. 2009, 15, 1645–1651. [Google Scholar] [CrossRef]
- Suh, S. Stability driven optimal controller design for high quality images. Electronics 2018, 7, 437. [Google Scholar] [CrossRef]
- Suh, S. ‘Unified H∞ Control to Suppress Vertices of Plant Input and Output Sensitivity. IEEE Trans. Control. Syst. Technol. 2010, 18, 969–975. [Google Scholar] [CrossRef]
- Suh, S. Estimation error based disturbance observer design for flexible loop shaping. Electronics 2018, 7, 358. [Google Scholar] [CrossRef]
- Kim, W.; Suh, S. Suboptimal Disturbance Observer Design Using All Stabilizing Q Filter for Precise Tracking Control. Mathematics 2020, 8, 1434. [Google Scholar] [CrossRef]
- Skogestad, S.; Postlethwaite, I. Multivariable Feedback Control: Analysis and Design; Wiley: New York, NY, USA, 1996. [Google Scholar]
- Lam, H.Y.-F. Analog and Digital Filters; Prentice-Hall: Upper Saddle River, NJ, USA, 1979. [Google Scholar]
- Franklin, G.F.; Powell, J.D.; Abbas, E.-N. Feedback Control of Dynamic Systems; Prentice-Hall: Upper Saddle River, NJ, USA, 2002. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Symbol | Value | Unit |
|---|---|---|---|
| torque constant | 0.0046 | ||
| inertia | |||
| damping coefficient | |||
| spring coefficient | 0.0437 | ||
| resonance frequency | 213,000 | radian | |
| damping ratio | 0.1 | - | |
| resonance frequency | radian | ||
| damping ratio | 0.004 | - | |
| resonance frequency | radian | ||
| damping ratio | 0.01 | - |
| Without | With | Comment | |
|---|---|---|---|
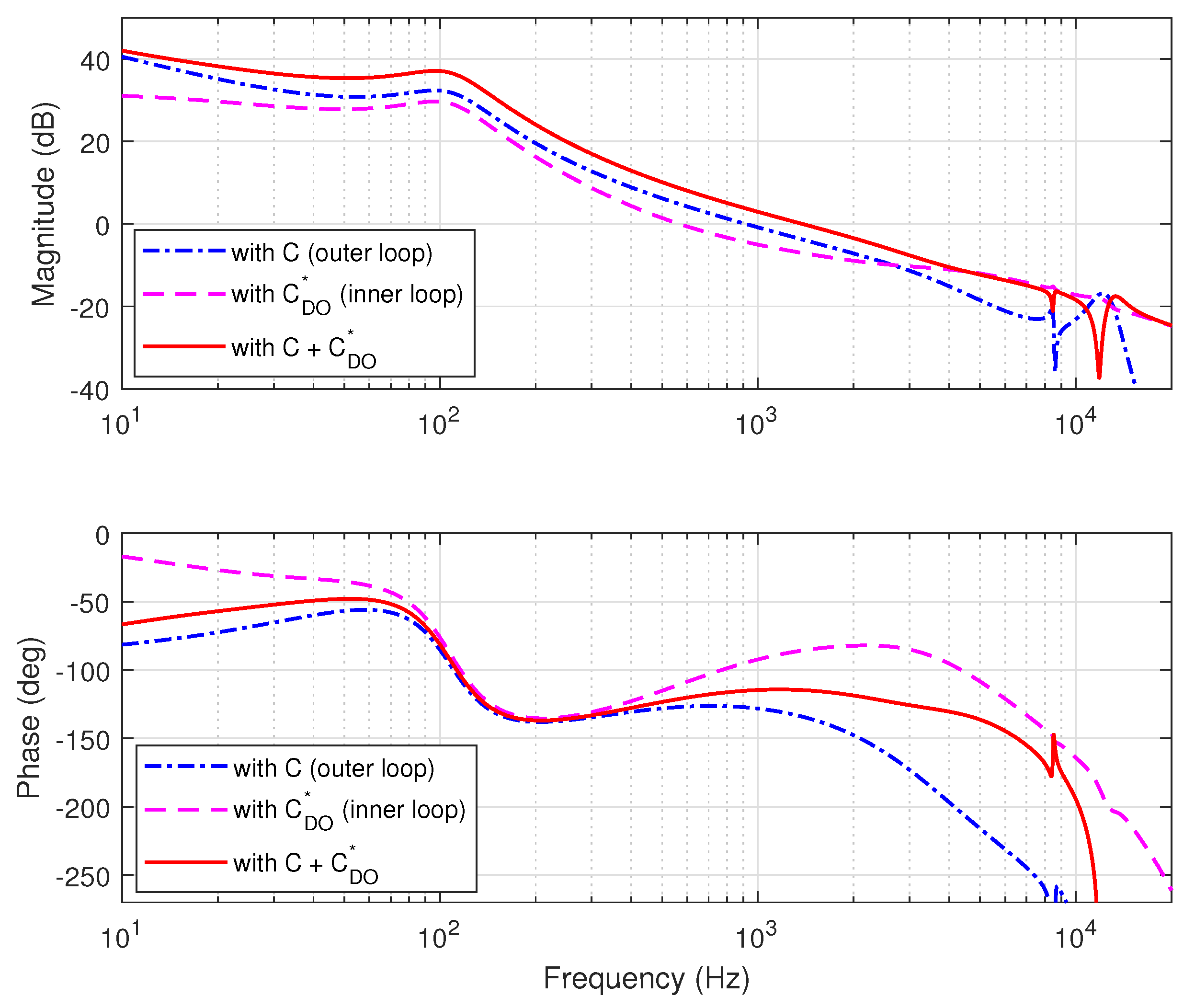
| 914 | 1377 | gain crossover frequency of open loop function (Hz) | |
| GM | 12.4 | 17.2 | gain margin (dB) |
| PM | 52.6 | 65.3 | phase margin () |
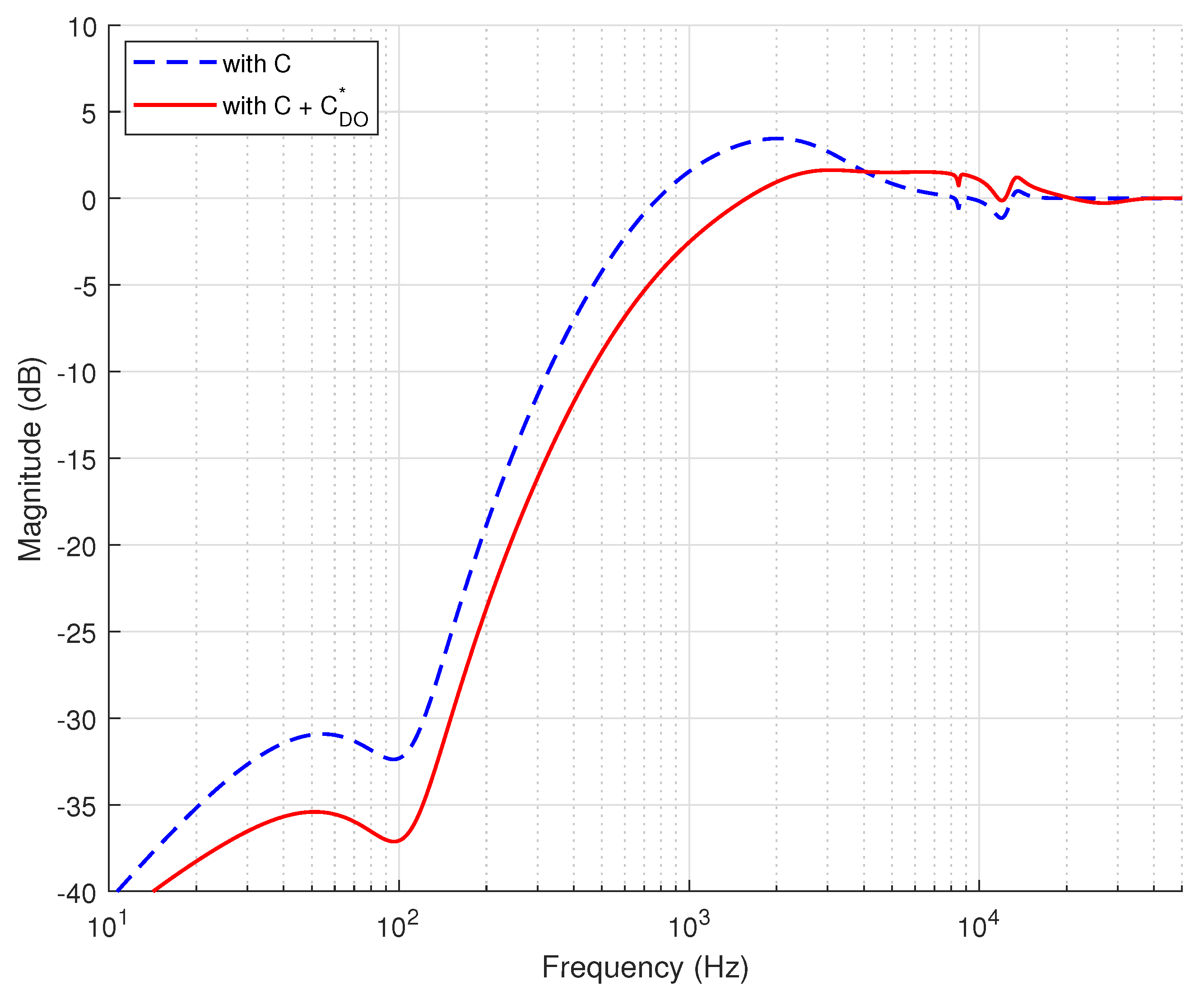
| 784 | 1580 | bandwidth of sensitivity (Hz) | |
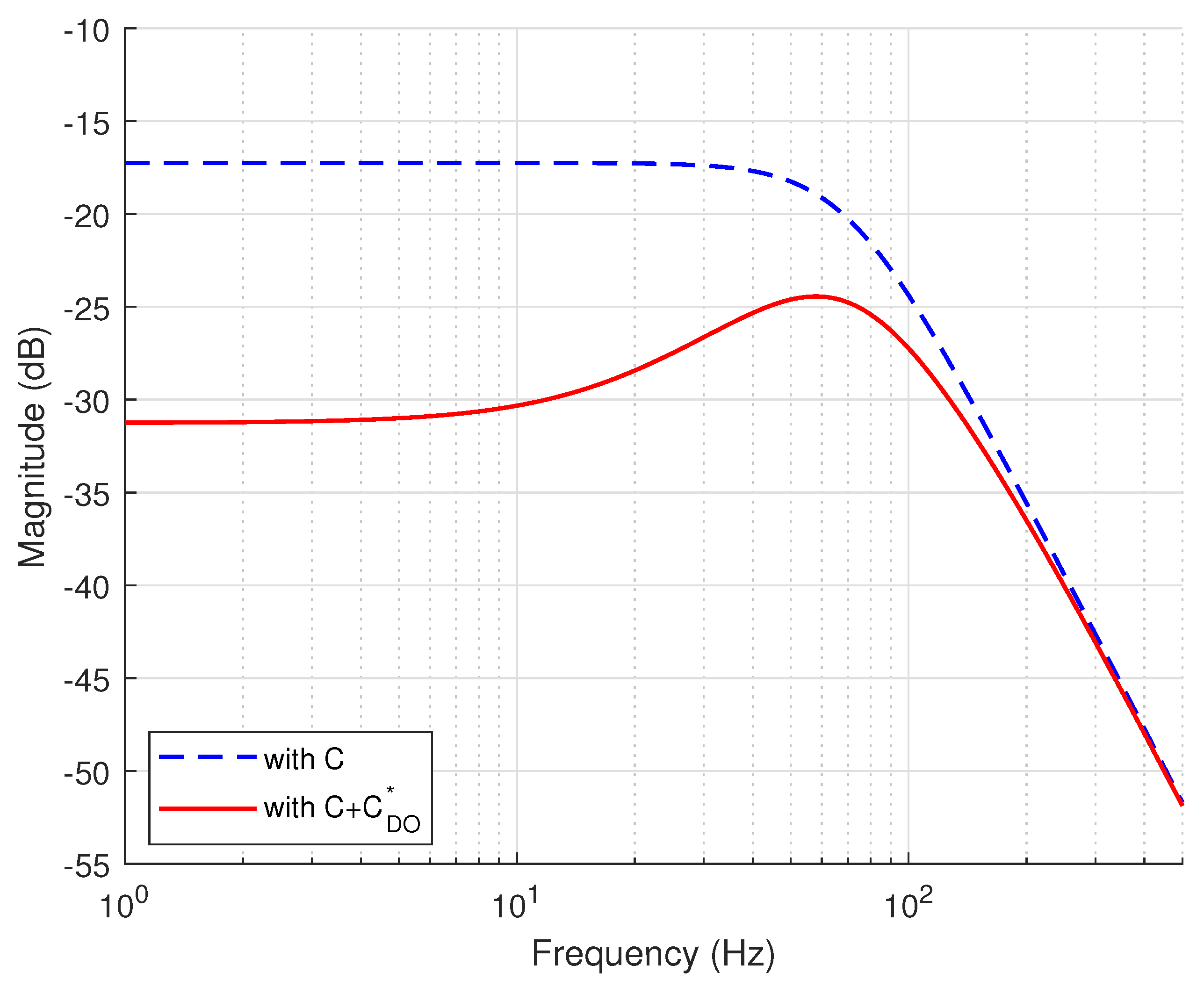
| 3.48 | 1.67 | peak of sensitivity (dB) | |
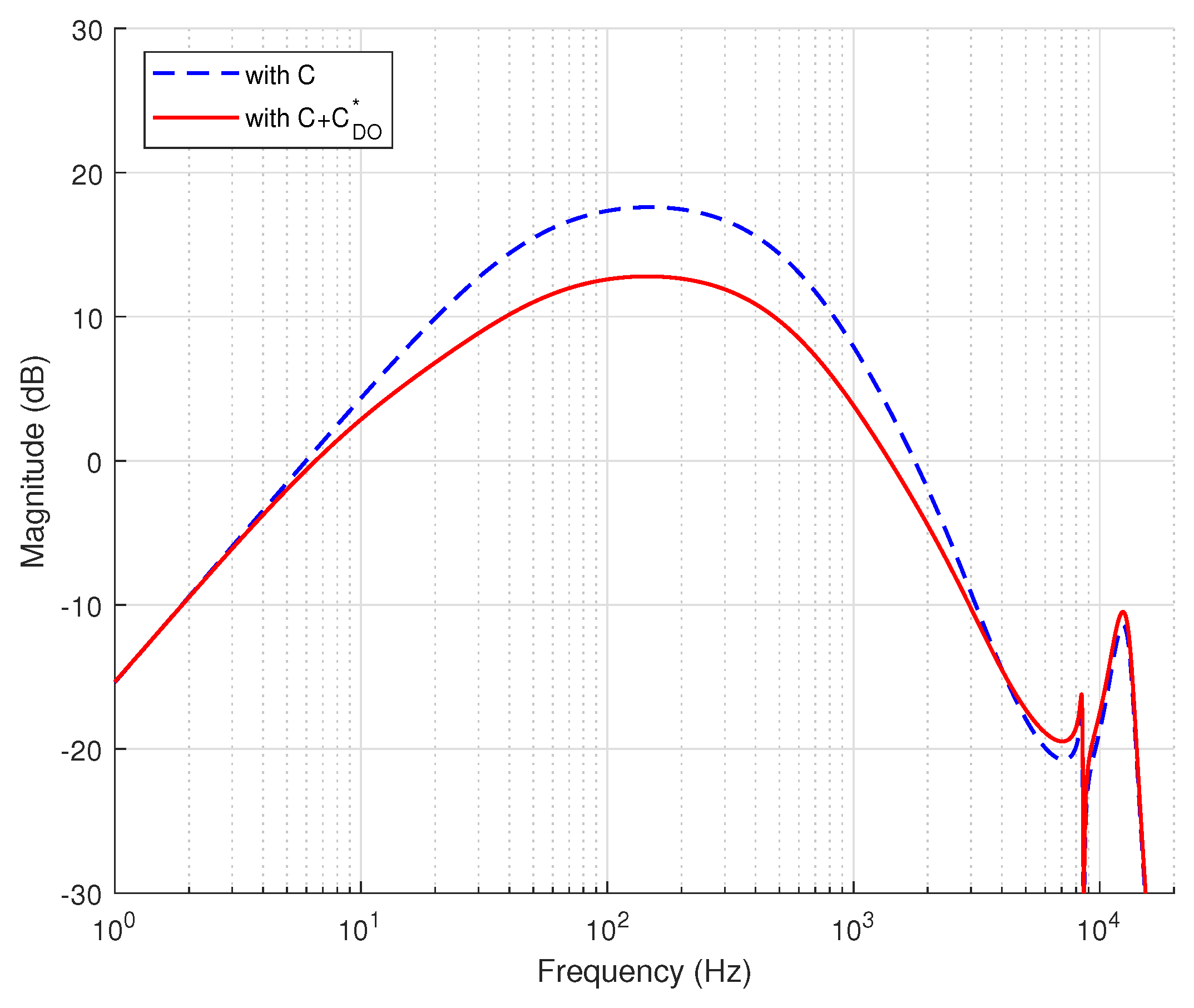
| 17.6 | 12.8 | peak of torque function (dB) | |
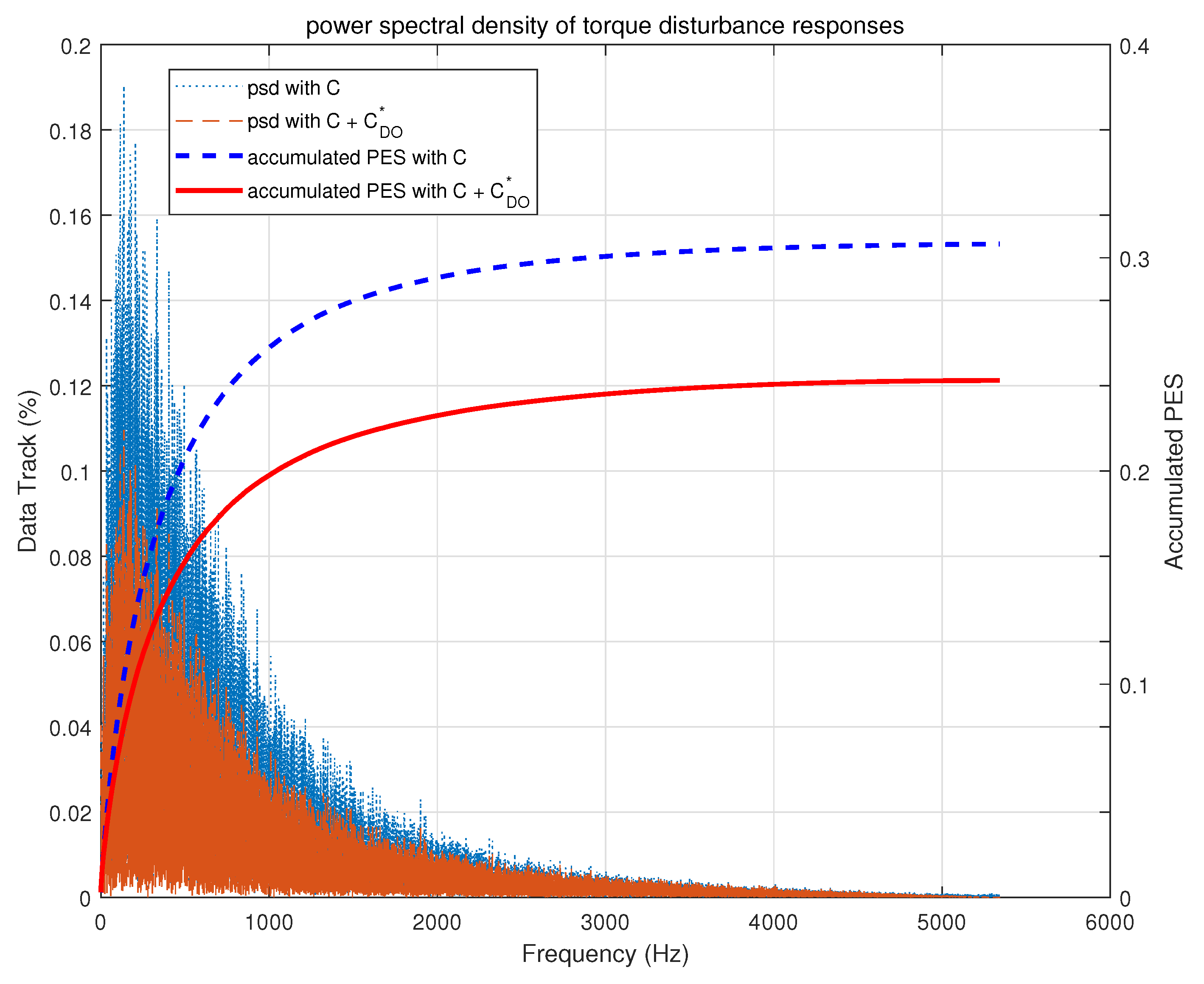
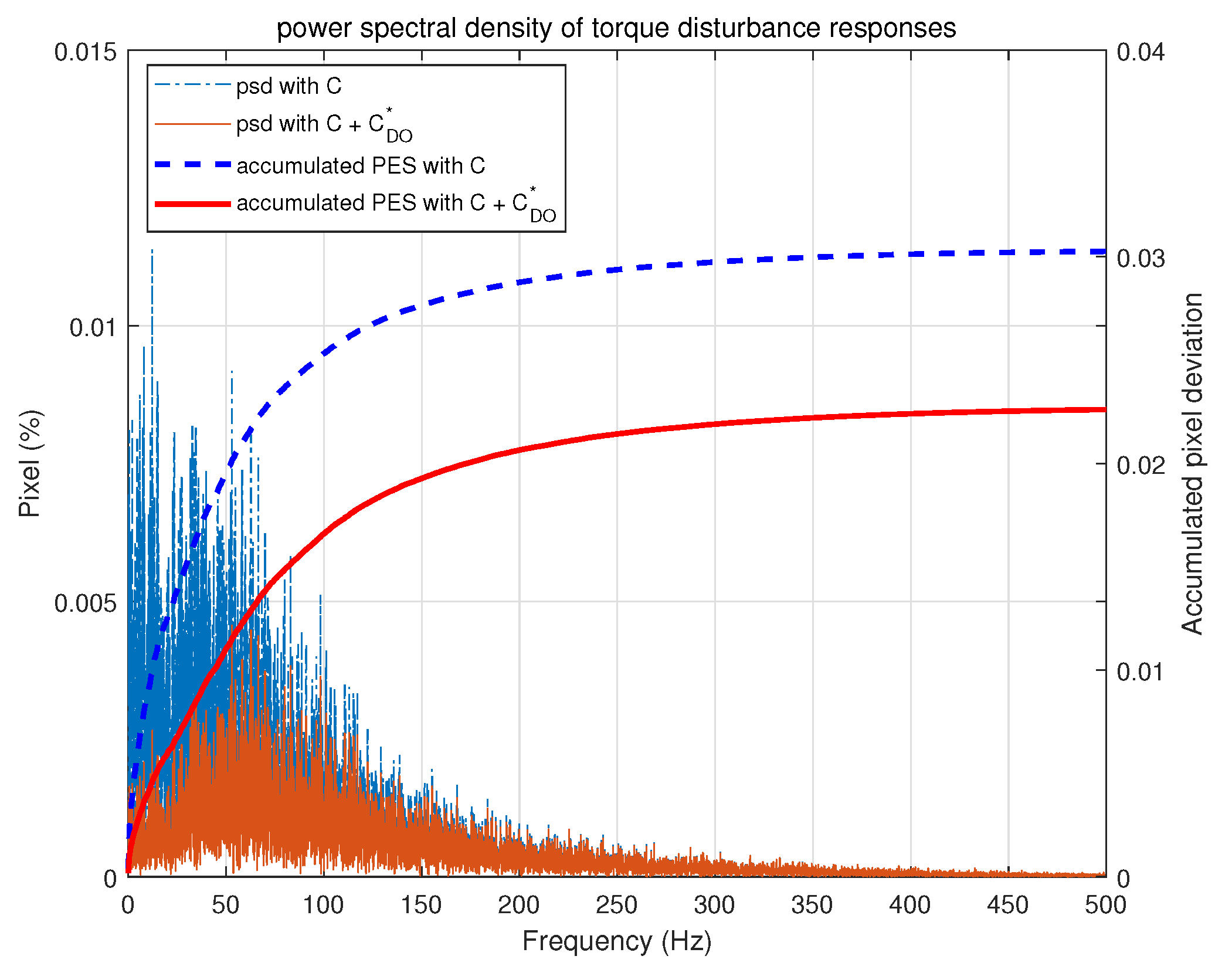
| acc. PES | 0.307 | 0.243 | accumulated PES |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, W.; Suh, S. Optimal Disturbance Observer Design for High Tracking Performance in Motion Control Systems. Mathematics 2020, 8, 1633. https://doi.org/10.3390/math8091633
Kim W, Suh S. Optimal Disturbance Observer Design for High Tracking Performance in Motion Control Systems. Mathematics. 2020; 8(9):1633. https://doi.org/10.3390/math8091633
Chicago/Turabian StyleKim, Wonhee, and Sangmin Suh. 2020. "Optimal Disturbance Observer Design for High Tracking Performance in Motion Control Systems" Mathematics 8, no. 9: 1633. https://doi.org/10.3390/math8091633
APA StyleKim, W., & Suh, S. (2020). Optimal Disturbance Observer Design for High Tracking Performance in Motion Control Systems. Mathematics, 8(9), 1633. https://doi.org/10.3390/math8091633