1. Introduction
In this work, we present a numerical method in order to approximate the solution of a Stieltjes differential equation of the type:
where
is the Stieltjes derivative with respect to a left-continuous non-decreasing function
g. That is, given
, we define, for each
,
as the following limit in the case it exists:
where
denotes the set of discontinuities of
g. In this particular case,
and
Defining Equation (
1) for “
g almost every
”, we are implicitly considering the Lebesgue–Stieltjes measure space
, where
is the
-algebra and
the measure constructed in an analogous fashion to the classical Lebesgue measure, where the length of
is given by
. The interested reader may refer to [
1] for details concerning this measure space. The theoretical study of these kinds of derivatives and their applications appears, for instance, in [
1,
2,
3,
4,
5], but can be traced back in the more general setting of fractional derivatives to [
6]. More recent works in this direction include [
7], where the authors studied
-fractional derivatives.
As stated in [
2] (Theorem 7.3), in the case
is increasing, left-continuous, and continuous at zero and
satisfies:
Hypothesis 1. is g-measurable for every ;
Hypothesis 2. , where is the space of the equivalence classes of absolutely integrable functions with respect to the g Lebesgue–Stieltjes integral;
Hypothesis 3. there exists such that for g almost every and every , we have that: Then, Problem (
1) has a unique solution in the space
of bounded
g-continuous functions
, that is the solution
u satisfies, for every
,
is a Banach space with the supremum norm—see [
2] (Theorem 3.4). Furthermore, the solution of Problem (
1) is the unique fixed point of the operator
where given
,
that is, the solution of Problem (
1) is such that
Furthermore, from [
2] (Lemma 7.2) and [
1] (Theorem 5.4), the solution will belong to the space
of
g-absolutely continuous functions, that is, of those functions
such that, for every
, there exists
satisfying that, if
is a collection of pairwise-disjoint open intervals such that
then,
It is precisely Expression (
9) that motivates the approximation based on the quadrature formulae for the Lebesgue–Stieltjes integral, which we introduce in
Section 2. We will see that, in order to obtain error bounds, it will be necessary to impose additional conditions on the regularity of the function
f and the solution of Problem (
1).
In order to conveniently organize this work, in
Section 2, we obtain some numerical quadrature formulae for approximating the Lebesgue–Stieltjes integral. In
Section 3, we present a predictor-corrector method based on the quadrature formulae obtained in
Section 2. In
Section 4, we analyze mathematically the consistency, convergence, and stability of the numerical method derived in
Section 3. In order to validate the numerical method, in
Section 5, we obtain the explicit solution of the general linear equation of the Stieltjes type. Finally, in
Section 6, we present some numerical results that we have obtained for the general linear equation and for realistic population models based on a Stieltjes differential equation.
2. Quadrature Formulae for the Lebesgue–Stieltjes Integral
We now introduce some convenient notation. Given an increasing left-continuous function
, we define
as
. In the same way, we define
whenever the left limit of
h exists at
t. Clearly,
g is continuous at
if and only if
. It is important to point out the fact that the interval
contains its right extremity, implying that the function
g is bounded. We have that
so
g has a countable number of discontinuities, say those in
, where
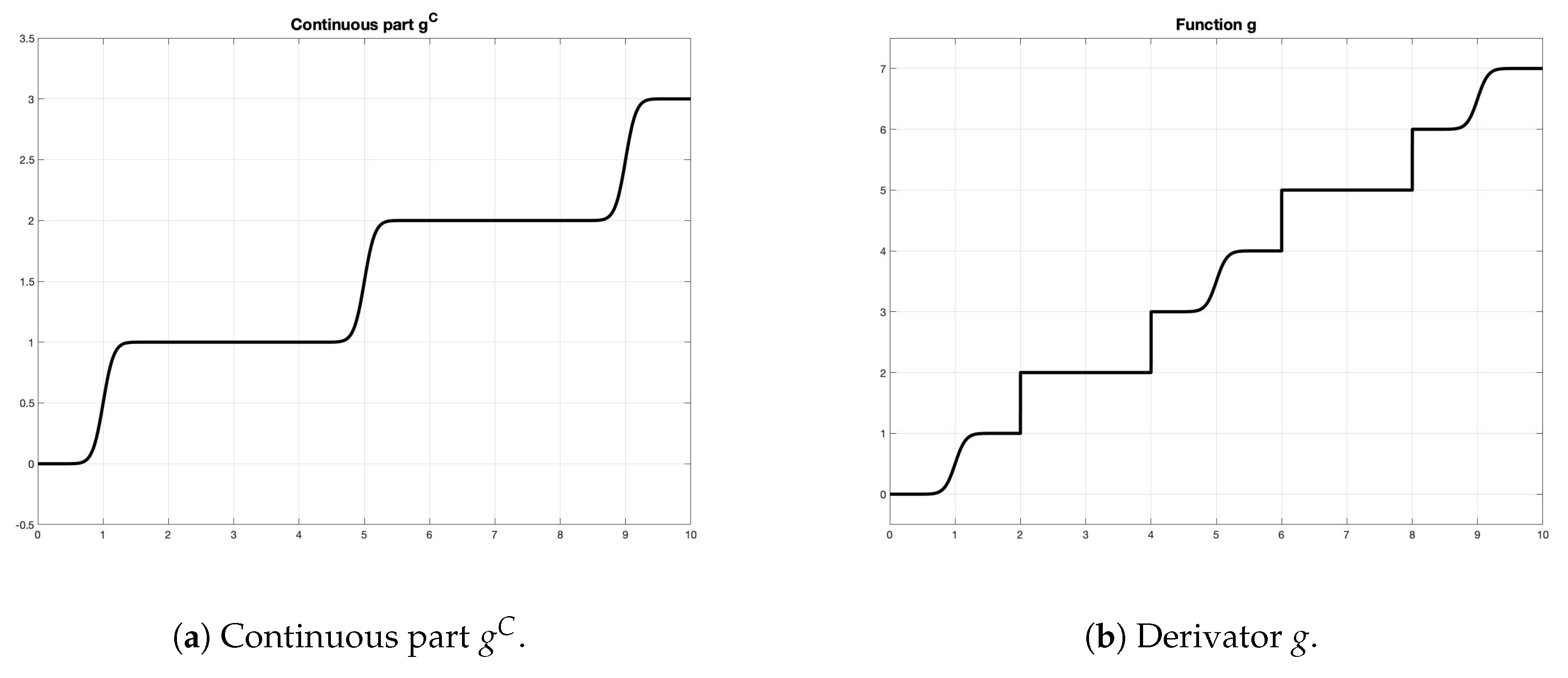
. If we define the bounded increasing function
as
it is clear that
, given by
, is bounded, increasing, and continuous. We say
is the continuous part of
g and
is the jump part of
g.
As we mentioned in the previous section, the numerical method we propose to approximate the solution of the differential problem (
1) in its integral form (
9) will be based on the approximation of the Lebesgue–Stieltjes integral. We start this section by proving a result that will allow us to interpret the integral in (
9) in terms of a Kurzweil–Stieltjes integral for which it will be possible to establish quadrature formulae. The Kurzweil–Stieltjes integral generalizes the Lebesgue–Stieltjes integral. On the one hand, it uses the gauge of the Henstock–Kurzweil integral in order to obtain an integral that is more powerful than that of Riemann (in fact, a function is Lebesgue integrable if and only if the function and its absolute value are Henstock–Kurzweil integrable); on the other hand, it uses the Stieltjes distribution function
g in order to put a weight in the integral. The reader will find a comprehensive study of the Kurzweil–Stieltjes integral in [
8].
Lemma 1. Let be an increasing left-continuous function and . Then,where on the right-hand side, we consider a Kurzweil–Stieltjes integral. Furthermore, if is the set of discontinuities of g in , we have that Proof. This lemma is an immediate consequence of [
8] (Theorems 6.12.3 and 6.3.13). That is, since
f is Lebesgue–Stieltjes integrable, by [
8] (Theorem 6.12.3), it is Kurzweil–Stieltjes integrable as well, and furthermore,
Now, due to the fact that
g is left-continuous,
, and since
, we obtain:
Finally, by [
8] (Theorem 6.3.13),
Since g is left-continuous, we have, in particular, that for every , and the desired result follows. ☐
In Lemma 2, we will see that, under certain regularity hypotheses on f and g, we can obtain error estimates for the quadrature formula for a point and the trapeze formula.
Lemma 2. Let us assume and is increasing and left-continuous. Furthermore, assume is p-H-Hölder on , that is,where and . Then, Remark 1. The previous quadrature formulae are most interesting in those cases where is finite, since in that case, the sums involved become finite.
Proof. Thanks to Lemma 1, it is enough to show that, if
is
p-
H-Hölder on
and
, then
and
Indeed, we can adapt the techniques in [
9] for the Riemann–Stieltjes integral to the case of the Kurzweil–Stieltjes’. On the one hand, by [
8] (Theorem 6.3.6), given that
is continuous and
, it holds that
On the other, thanks to [
8] (Theorem 6.4.2) (integration by parts),
from which, given that
is continuous,
Let us define
as
We have that
for every
. Then, thanks to the bound (
24), we obtain the bound (
23). In order to prove (
22), we can proceed in an analogous fashion by integrating by parts
where we have already canceled out the terms concerning the sum. From the previous expression, we obtain
☐
As we will see later on, it will be of special interest to consider the case when and behaves in a similar way to . In such a case, we can sharpen the previous quadrature formulae to obtain Lemma 5.
Definition 1. Let and be left-continuous and increasing. We say f is g-Lipschitz continuous with Lipschitz constant H if for every .
Lemma 3. Let be left-continuous and increasing g-Lipschitz continuous. Then, f is g-continuous, bounded, g-integrable, and of bounded variation.
Proof. It is clear that f is g-continuous. Since g is bounded and for every , f is bounded as well.
The g-integrability is a straightforward consequence of the definition of the Riemann–Stieltjes integral and the fact that f is g-continuous. Finally, , so f is of bounded variation. ☐
Corollary 1. Let be left-continuous and increasing with being p-H-Hölder on . Let be g-Lipschitz continuous with Lipschitz constant H. Then, The error estimates obtained in the previous formulae are not enough for our proposes, that is proving the convergence of the numerical approximation to the solution of Problem (
1). In order to improve the previous estimations, we must add some extra requirements to the continuous part of functions
g and
f.
In the next lemma and corollary, we will prove that if f is a g-Lipschitz continuous function, some properties of and are transferred to and , respectively. In particular, we will see that f is a g-Lipschitz continuous function and is Lipschitz continuous, then is also Lipschitz continuous. This property will be fundamental in order to improve the previous quadrature formula.
For the next lemma, we denote by the set of connected components (in the usual topology) of .
Lemma 4. Let be left-continuous in and increasing and be g-Lipschitz continuous with Lipschitz constant H. Then, is -Lipschitz continuous with Lipschitz constant H. Furthermore, if f is increasing, then is -Lipschitz continuous with Lipschitz constant H.
Proof. Let
,
. Then,
Thus, taking the limit when
s tends to
t from the right,
Hence, for
,
,
Therefore, is -Lipschitz and g-Lipschitz with constant H.
We know that . This implies, on the one hand, that with is countable and, on the other, that . Observe that g is continuous at b, and either g is continuous at a or for some . In this last case, we will assume, without loss of generality, that .
Thus, consider, for
, the functions
Given
(that is, an interval that is a connected component of
) and
,
, since there are no jumps of
in
,
and
, so
. Define, for
,
,
Since for every and and are continuous at the points of , it also holds for . Furthermore, . Hence, if for and , then for . To see this, just observe that if and , we consider .
Now, for any
,
, either
; thus,
, or
, and
We conclude that .
Observe now that
converges uniformly to
and
converges uniformly to
, so
converges uniformly to
Since for every , , and thus, is -Lipschitz continuous with Lipschitz constant H. ☐
Corollary 2. Let be left-continuous in and increasing and be g-Lipschitz continuous with Lipschitz constant H. Then, is -Lipschitz continuous with Lipschitz constant H.
Proof. Since
f is
g-Lipschitz continuous, it is
g-absolutely continuous and, by [
1] (Theorem 5.4), there exists
-a.e. and
. Since
f is
g-Lipschitz continuous with Lipschitz constant
H, for
,
Thus, by the definition of the Stieltjes g-derivative, -a.e.
Let
and
. Define:
Clearly, both and are g-Lipschitz continuous with Lipschitz constant H and increasing, so and are -Lipschitz with Lipschitz constant H. Thus, is g-Lipschitz with Lipschitz constant H. ☐
Corollary 3. Let be continuous in , left-continuous in , and increasing and be g-Lipschitz continuous with Lipschitz constant H. If is Lipschitz continuous with Lipschitz constant H, then is Lipschitz continuous with Lipschitz constant .
Proof. This is a direct consequence of the previous corollary since for all
☐
In order to simplify the notation, from now on, we will assume, when necessary, that both the continuous part of f and the continuous part of g are Lipschitz continuous with the same Lipschitz constant H (if necessary, we redefine H to be ).
Lemma 5. Let be left-continuous and increasing and be g-Lipschitz continuous with Lipschitz constant H. We also assume that and are Lipschitz continuous with Lipschitz constant H. Then,andwhere is the set of discontinuities of g in . Proof. First observe that, since
f is
g-continuous,
—see [
2] (Proposition 3.2). Separating the jump part from the continuous part in both
f and
g, we have that:
where the three first integrals correspond to series and the fourth can be approximated using the previous quadrature formulae. Indeed, using analogous reasoning as that in [
8] (Theorems 6.3.12 and 6.3.13):
Taking that into account,
Now, using the same argumentation as before,
since
. The proof of identity (
44) is analogous. ☐
3. Description of the Numerical Method
In this section, we present a predictor-corrector method based on the previous quadrature formulae. We will assume
is continuous at
and that
is finite. Let
be a solution of problem (
1), and in what follows, let
,
Consider now a set satisfying:
Hypothesis 4. and ; , for every and . We denote this by .
Hypothesis 5. is g-continuous, and in particular, and and are Lipschitz-continuous with the same Lipschitz constant H.
Hypothesis 6. , for every .
Let us define
and
, for
. By the definition of the Stieltjes derivative,
and in the particular case
,
, so we have that
. Then, for every
,
where the integral is of the Kurzweil–Stieltjes type. Using (
44) on each interval,
Thus, in the case that we use (
45), we have:
Observe that the condition
implies that, on each interval, the quadrature formulae lose the terms related to the interior jumps. Restricting to
, we have:
Taking into account the previous formulae, it is clear that, if we want to use (
54) to approximate (
52), the a-priori ignorance of the value
forces us to estimate it. In order to do this, we just have to use (
53), for which no further estimation is needed. That is, we will use (
53) as the predictor and (
54) as the corrector. Thus, the method will be as follows. Given
, we compute
as:
4. Error Analysis
In this section, we analyze the numerical method introduced in the previous one. As happens with those numerical methods based on quadrature formulae—cf. [
10,
11]—it will be crucial at this point to study the error of approximating the integral in this way.
As before, we will need certain regularity hypotheses on the derivator g, as well as on the function f when composed with the solution of the problem. Thus, we will assume Hypotheses 1–3 since they are necessary to guarantee the existence of Problem (1)—see page 2; Hypotheses 4–6, established in the previous sections in order to formulate the numerical method and the following additional hypotheses for proving the convergence of the method:
Hypothesis 7. for every , and there exits such thatfor every . Hypothesis 8. for every , and there exits such thatfor every . We must emphasize that the above hypotheses are not independent. For example, Hypothesis 6 implies Hypotheses 1 and 2, and Hypothesis 7 implies Hypothesis 3. Therefore, for our purposes, it is sufficient that Hypotheses 4–8 are fulfilled. We will now establish the basic notions related to the truncating error associated with the quadrature formula of the predictor-corrector method.
Definition 2 (Local truncating error associated with the quadrature formula). Given a partition satisfying (H4), we define:
The local error associated with Formula (44) as:with . The local error associated with Formula (45) as: with .
Lettingwe define the local truncating error of the predictor-corrector method associated with (58), in terms of the exact solution, as:with .
Remark 2. It is usual to find in the literature local truncating errors defined relative to the discretization step h, that is , and —cf. [10,11]. In those cases, for , We opted for the first set of errors in order to simplify the notation. In any case, the relation between both definitions is clear.
Now, we present some bounds of the errors.
Lemma 6. For every , we have the following bounds:
.
.
.
Proof. The two first assertions are a direct consequence of Lemma 5. In order to obtain the third one, we manipulate the definition of
, leaving:
from which we obtain, using the definition of
,
By the mean value theorem of differential calculus, there exists
in the open interval of extremities
,
such that
Then, taking the absolute value,
Using the bounds obtained for
and
,
☐
Corollary 4 (Consistency of the numerical method). In the functional framework in which Lemma 6 is valid, the method is consistent.
Corollary 5. Indeed, thanks to the bounds provided by Lemma 6, we obtain:from which we deduce the consistency of the method in the classical sense. Remark 3. In view of the bounds in Lemma 6, we must observe that the introduction of a predictor in the quadrature formula does not penalize its convergence order. This is due to the fact that (which is the predictor term in the formula) appears multiplied by h in (66). In our case, due to the regularity of the terms involved, we are not capable of improving the order of convergence of the two-point formula with respect to the one-point one. This is not usually the case, as in the literature, we can see examples—for instance [10,11]—where the two-point quadrature formula has a better convergence order—without the predictor penalizing the global order of the method—than the one-point one. Definition 3 (Local error of the algorithm). We define the following errors associated with the numerical algorithm.
, with , is the local error of the corrector regarding the limit from the right at . It is clear that it does not make sense to consider this error for .
, where , is the local error of the predictor at the point .
, with the local error of the predictor at the point , and is the error associated with the initial condition.
In Lemma 7, we obtain bounds for the previous lemmata based on recurrence formulae, which, afterwards, we will analyze in order to obtain the bounds of the error at each of the points of the temporal discretization.
Lemma 7. Under the hypotheses of Lemma 6, we derive the following formulae for , and , with ,
Proof. We compute each of the error bounds separately.
Local error of the corrector regarding the limit from the right: We have that:
where
belongs to the open interval of extremities
and
. Taking the absolute value on both sides,
Local error of the predictor at the point: We have:
where
belongs to the open interval of extremities
and
. Taking the absolute value on both sides,
Local error of the predictor at the point: We have that
where
belongs to the open interval of extremities
,
and
belongs to the open interval of extremities
and
. Taking the absolute value on both sides,
where:
☐
Remark 4. Observe that previous error formulae can be simplified in the case . In this situation, those errors concerning the limit from the right coincide with the ones of the corrector at the point, and we recover the classical error formulae.
From the formulae in Lemma 7, we can prove the following result concerning the error of the numerical method.
Lemma 8. Under the hypotheses of Lemma 7, we have, for ,where . Proof. Using the notation of Lemma 7, we have that
Thus, applying the previous bound recursively,
Accounting for the number discontinuities of the derivator (which we denote by
), we obtain:
Now, taking into account that, for a given number
,
and that
, we have:
☐
Now, we will prove the main theorem of this section. In it, we will see that, in the framework of the previous results, we can guarantee the convergence of the method introduced in the previous section.
Theorem 1 (Convergence of the predictor-corrector method)
. Under the hypotheses of Lemma 5, if we assume , we have, for a given , thatFurthermore, we get the following error bounds:for every , where Proof. We analyze each case separately.
☐
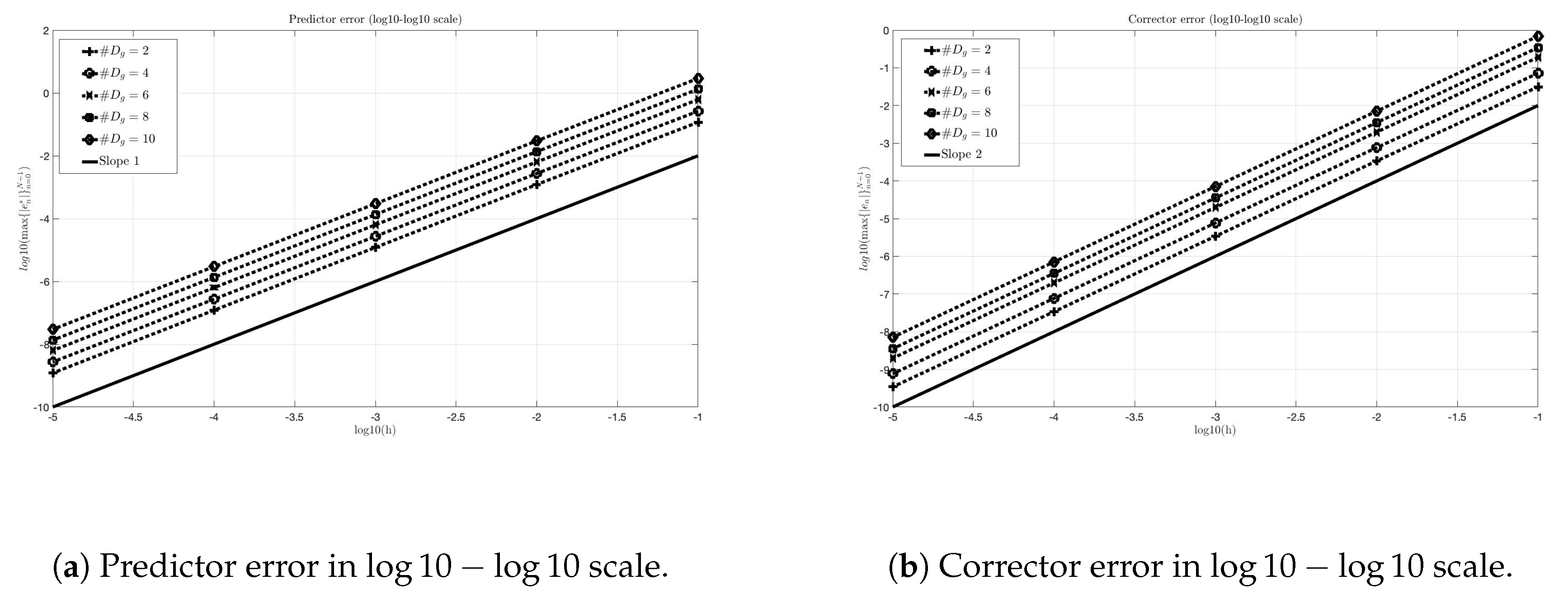
Remark 5. Observe that the order of convergence of the method equals the order of τ minus one, that is of the order of . In the case that we deal with functions with extra regularity, we may be able to improve the order of τ, which would better the order of convergence of the numerical method. Last, we would like to mention that the method we presented generalizes the classical order two Runge–Kutta. This assertion is motivated by the fact that the usual derivative is a particular instance of the Stieltjes derivative in the case .
Last, we analyze the stability of the method with the intention of evaluating its sensitivity towards the perturbations generated by the rounding errors produced while evaluating the different elements of Scheme (
58). We omit the proof of the following result, as it is essentially a modification of that of Theorem 1.
Theorem 2 (Stability of the numerical method)
. Given , we consider the following modification of the numerical scheme (58):where . Defining , for , it holds thatwhereThen, writing , , and , we have that, for every , 5. The General Linear Equation
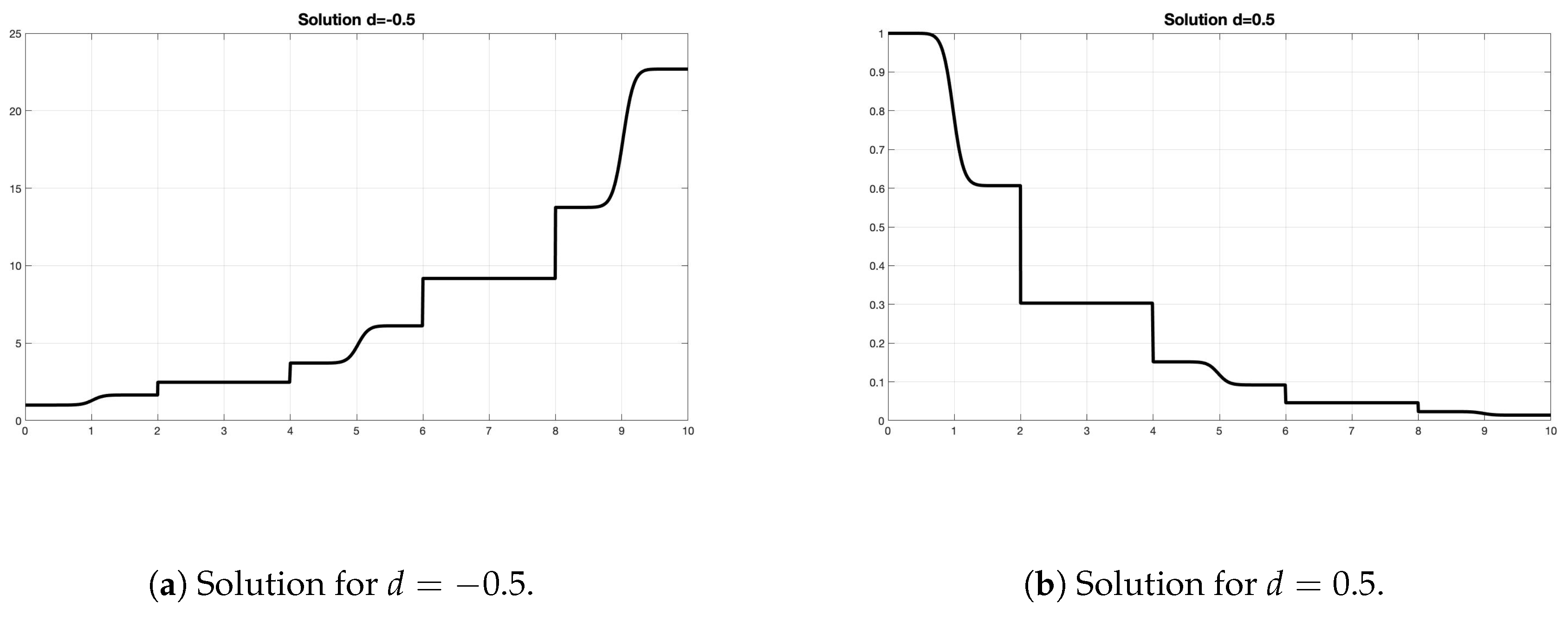
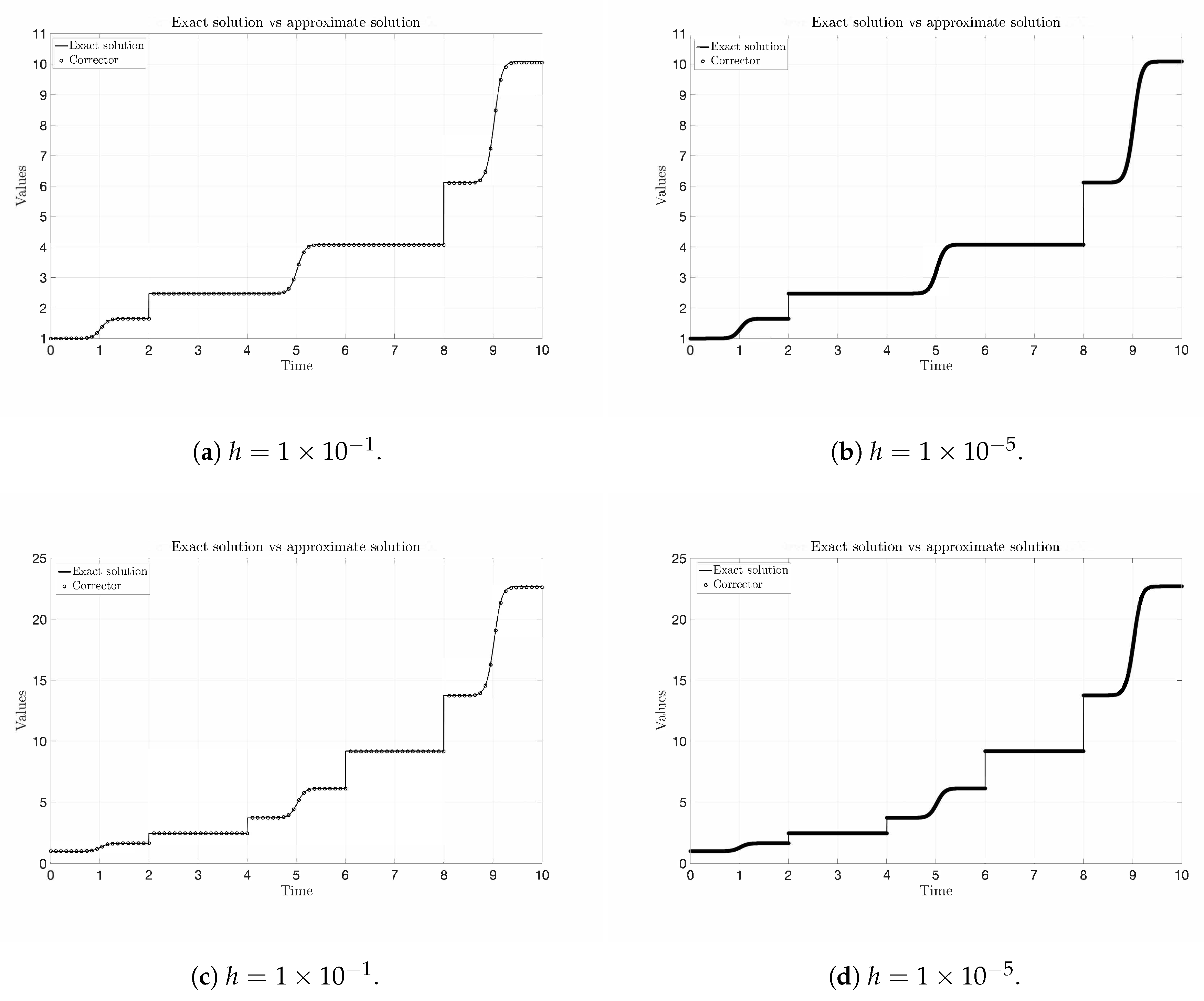
In order to validate the numerical approximation of the solution of Problem (
1), we will consider the following general linear equation as a test problem:
where
,
and
Under (
97) and (
98), we know there is a unique solution of (
96), which can be computed explicitly—see [
2]—as the unique solution of the problem
where
are
functions thanks to [
2] (Proposition 6.8). Therefore, by [
2] (Proposition 6.7), the solution of Problem (
99) is given by
where given an element
,
being the set of points such that
and
. This set has finite cardinality—see [
2] (Lemma 6.4). In our case,
; thus,
if and only if
. We will still denote by
and
, so
As we can see above, the general expression of the exponential
, and therefore, of the solution of the general linear Equation (
102), has a convoluted statement. This expression can be simplified if we consider the particular case where
d is constant and
,
—the case that we will consider in the numerical experiments. In that case,
It is also remarkable that, in the case of , we recover the classical exponential. Furthermore, we have the following direct result for the problem with constant coefficients.
Theorem 3. Let be increasing, left-continuous, and such that ; , , and such that Then, the solution of the problemis given by the following expression: If we assume that the set of discontinuities of function g is finite and we consider a time discretization satisfying hypothesis (H4) with , , then the condition is trivially satisfied. Therefore, we have the following corollary for the homogenous case. The proof is straightforward.
Corollary 6. Let be increasing and left-continuous, such that with a set of discontinuity points that we can assume equal to the discretization points, that is , where for . Then, the solution of the problemwhere and , , is given by: Finally, it is remarkable that, in the previous corollary, we can change the hypothesis
,
by
,
, and obtain a similar expression for the solution taking into account the general Formula (
102). The last hypothesis is more general than the previous one, but in order to present the results in a clear way, we will assume that the first hypothesis is fulfilled.
7. Conclusions
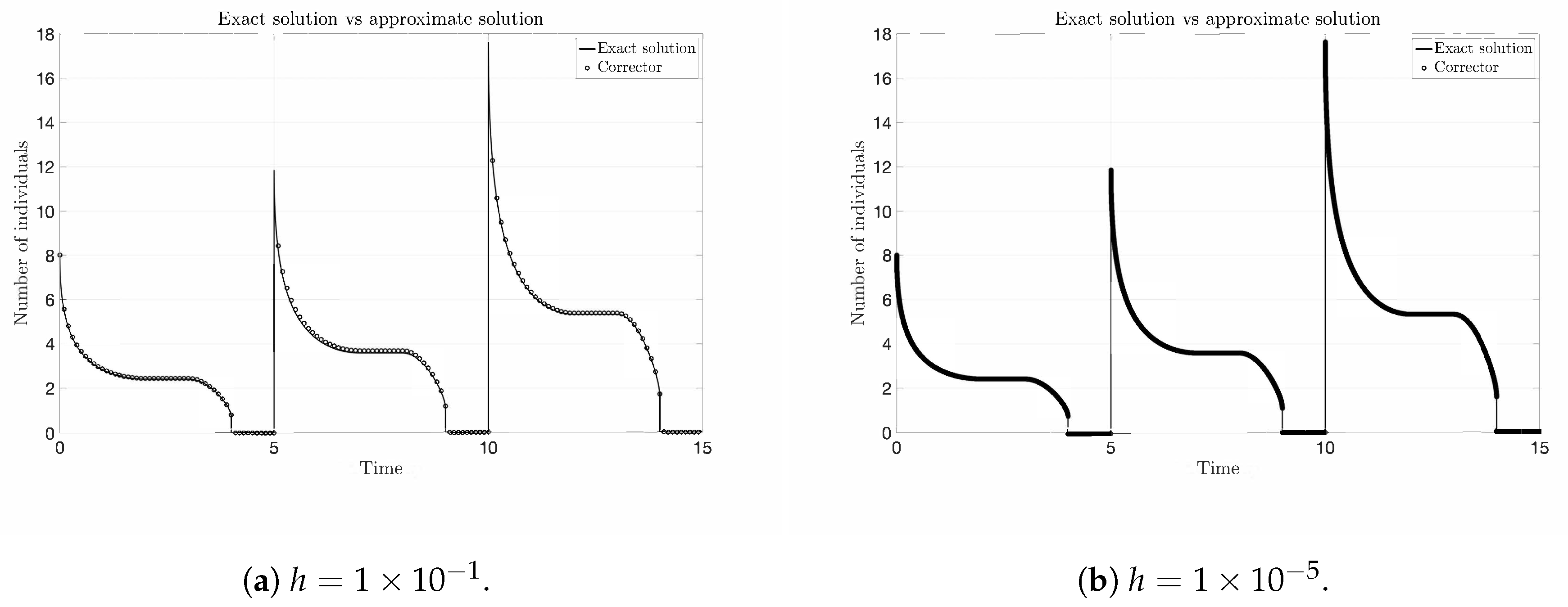
In this work, we obtained a new numerical scheme based on quadrature formulae for the Lebesgue–Stieltjes integral for the approximation of Stieltjes ordinary differential equations. We proved several theoretical results related to the consistency, convergence, and stability of the numerical method. The techniques that we developed can be generalized to obtain higher order Runge–Kutta-like methods.
In order to validate the numerical method, we compared the numerical and the exact solution for the linear equation. We realize that the order of convergence that we obtained in the numerical experiments is higher than we proved in the theory. This fact may mean that it is possible to improve the estimates obtained under more stringent regularity assumptions regarding the functions involved.
We also compared the numerical and the exact solution of a realistic silkworm population model (
118) based on a Stieltjes differential equation. We obtained a good behavior of the numerical method even though we approximated the right-hand side by a quadrature formula. The behavior observed in the solution of Equation (
118) (0D model) can also be appreciated in the 2D model based on a parabolic partial differential equation of the Stieltjes type (cf. [
13] (Section 5)):
where
,
,
, and
f is given by Formula (
119).
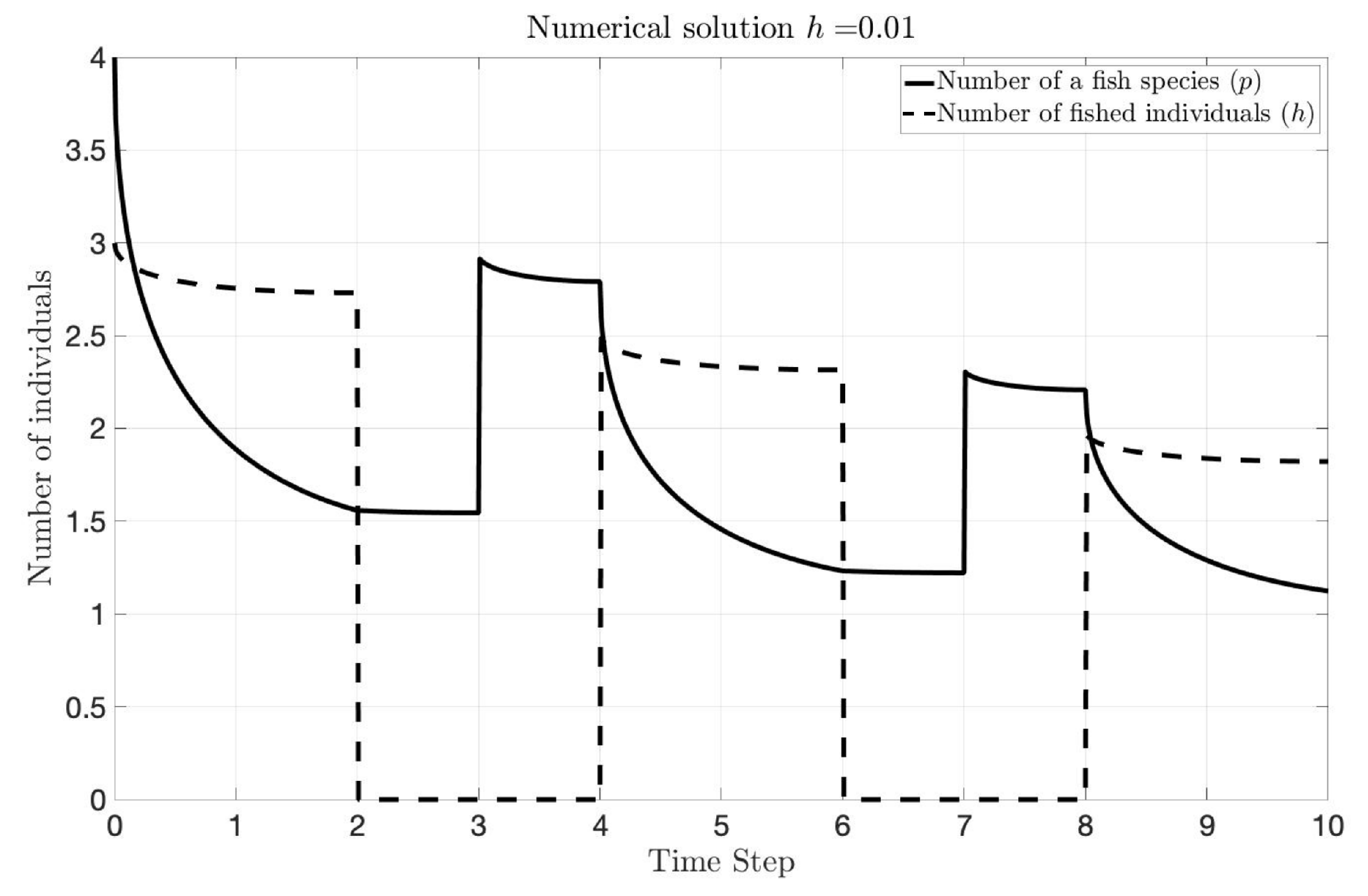
Finally, we proposed a numerical method to approximate the solution of systems of Stieltjes differential equations with several derivators, and we applied it to a system related to a fish population model for which no explicit solution is known. We observed that the behavior of the numerical solution is compatible with the interpretation of the model given in [
12].
The ideas we developed in this work can be used to design an algorithm that improves the numerical approximation of the linear Stieltjes parabolic problems given in [
13]. In this work, the authors obtained a numerical approximation of (
130) by truncating the Fourier series of the solution and using the exact solution (
120) to obtain each of the coefficients of the aforementioned series. Instead of truncating the Fourier series, we can perform a temporal discretization similar to the one that we developed in this work for Stieltjes differential equations. Indeed, if we assume Hypotheses 1–6 in the scalar case, we can consider the following modification of the approximation (
53):
In this case, we obtain the following implicit numerical method: given
, we compute
as
For example, if we follow the same scheme as in this work and consider the following linear Stieltjes parabolic problem:
where
,
,
, and
(cf. [
13] for a description of the Stieltjes–Bochner space
). We can apply Method (
132) to the integral expression form of the solution of (
133), and we obtain the following numerical method: given
, we compute
as
where
(cf. [
14] (Chapter 7) for the mathematical analysis of the previous approximation in the case
). An analogous discretization can be applied to System (
130), and the resulting scheme can be compared with the scheme given in [
13]. In future works, we intend to mathematically study the approximation (
134) even in the case of considering a finite-dimensional subspace
.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}