Stability and Bifurcation in a Predator–Prey Model with the Additive Allee Effect and the Fear Effect †

College of Mathematics and Computer Science, Fuzhou University, Fuzhou 350116, China
*
Author to whom correspondence should be addressed.
†
These authors contributed equally to this work.
Mathematics 2020, 8(8), 1280; https://doi.org/10.3390/math8081280
Submission received: 12 July 2020
/
Revised: 26 July 2020
/
Accepted: 31 July 2020
/
Published: 3 August 2020
Abstract
:We proposed and analyzed a predator–prey model with both the additive Allee effect and the fear effect in the prey. Firstly, we studied the existence and local stability of equilibria. Some sufficient conditions on the global stability of the positive equilibrium were established by applying the Dulac theorem. Those results indicate that some bifurcations occur. We then confirmed the occurrence of saddle-node bifurcation, transcritical bifurcation, and Hopf bifurcation. Those theoretical results were demonstrated with numerical simulations. In the bifurcation analysis, we only considered the effect of the strong Allee effect. Finally, we found that the stronger the fear effect, the smaller the density of predator species. However, the fear effect has no influence on the final density of the prey.
1. Introduction
In 1931, to study the relationship between the growth of a species and its density, Allee [1] proposed the effect later called the Allee effect, which means that the population size will decrease if it is too sparse. The Allee effect occurs due to lots of factors, including inbreeding, depression [2], difficulty in finding spouses [3], social dysfunction at low-densities [4], and so on. In the following, we mention two single species models with Allee effects.
The first one proposed by Bazykin [5] is described by the following equation.
where r denotes the intrinsic per capita growth rate of the population and K is the carrying capacity of the environment. Model (1) is said to havecq strong Allee effect if and to have a weak Alleee effect if . To study the dynamics, Bazykin introduced a population threshold, which is the minimum population size for the species to survive. It is shown that with a strong Allee effect, the population must surpass this threshold in order to grow. However, there is no threshold for a weak effect.
Further, in a study on how mating affects a population’s reproductive rate, Dennis [6] found that not only can a lack of mates affect it, but also the mating function has a great influence on the birth rate in the population growth rate. To describe the Allee effect of prey, the isometric hyperbolic function is used. Under such circumstances, the Allee effect is called additive. The single species model with an additive Allee effect proposed in [6] is as follows.
where m and a are constants, which reflect the degree of Allee effect. Biologically, m denotes the rate for level of Allee effect and a represents the population size of the prey specie whose fitness is half its maximum value. Note that if then (2) has the weak Allee effect and if then it has the strong Allee effect. For sparse populations experiencing the Allee effect, Dennis demonstrated with numerical simulations that the critical density, the growth, and the extinction probability can be obtained. Until now, many researchers have paid a great deal of attention on the impact of Allee effect on predation (see [7,8,9,10,11,12,13,14,15,16,17,18]). For example, Liu et al. [9] showed that a system with gestation delay and an additive Allee effect is unstable if economic interest increases through zero, which may occur in the case of an Allee effect (strong or weak). In [10], they found the extinction of species due to the Allee effect.
Research has indicated that predators can not only kill prey directly but also affect the behavior of prey, and the latter is more lethal than the former. In fact, all animals show many kinds of anti-predator responses, such as changes of foraging behavior, habitat usage, physiology, and so on ([19,20,21,22,23]). To describe that, the concept of fear in the prey was introduced and studied ([24,25,26,27,28,29,30]). In particular, Wang et al. [29] for the first time proposed the following predator–prey model with the cost of fear:
where k is the level of fear, which is due to anti-predator behaviors of the prey; g is the functional response. Based on the biological background, the following reasonable assumptions are imposed,
Taking the linear functional response, i.e., , Wang et al. found that if then is globally asymptotically stable and if then the unique positive equilibrium is globally asymptotically stable. Moreover, analysis reveals that the fear factor does not change the stability of the equilibrium when it exists. In (3), the fear factor affects the intrinsic growth rate. Then, inspired by [29] Sasmal [30] considered the case wherein the fear factor impacts the growth rate and the growth rate has the strong Allee effect. The model studied is given by
where f represents the effect of fear. It was found that (4) undergoes a subcritical Hopf-bifurcation at . Moreover, changing the parameter values of and m can produce bi-stability or stable oscillatory coexistence of both prey and predator. It was further observed that the change of f can only change the density of predator at the positive equilibrium but not the stability of the equilibrium.
To the best of our knowledge, so far there is not much being done on predator–prey models with both the additive Allee effect and the fear effect. This motivated us to modify (4) by replacing the Allee effect with the additive Allee effect. Precisely, we studied the following model:
where and stand for the fear effect and additive Allee effect, respectively; r is the intrinsic growth rate of prey; b is the predation rate; is the conversion coefficient; and n is the death rate of the predator. As we known, the relationship between prey and predator has always been the focus of scholars [31,32,33,34,35,36,37]; hence, this paper will enrich the literature in this field.
The remaining part of this paper is organized as follows. First, we study the existence and local stability of equilibria of (5) in Section 2 and Section 3, respectively. Then we provide sufficient conditions ensuring the global stability of the positive equilibrium in Section 4. In Section 5 is the bifurcation analysis, which includes saddle-node bifurcation, transcritical bifurcation, and Hopf bifurcation. These theoretical results are supported with numerical simulations in Section 6. The paper concludes with a discussion on the impact of the fear effect.
2. Existence of Equilibria
Obviously, system (5) always has the trivial equilibrium . In order to obtain the other equilibria, we consider the two nullclines:
Note that if from the second line of (6). Additionally, from this equation, we get (which corresponding to the boundary equilibria) and with (which corresponds to the positive or internal equilibrium).
We first study the existence of boundary equilibria. Substituting into 1st line of (6) gives
or
Denote
Let . Then when and hence (7) only has one root, denoted by ; when and hence it has two roots, denoted by and ; when and hence it has no real roots. Note that and if and only if . Based on the above discussion, we can have the following result on the existence of boundary equilibria.
Lemma 1.
The following results on the existence of boundary equilibria of (5) are true.
- (i)
- Suppose . Then the existence of boundary equilibria in addition to is summarized in Table 1.
- (ii)
- Suppose . Then besides , there is also another boundary equilibrium only when .
- (iii)
- Suppose . Then besides , there is also another boundary equilibrium only when .
Next, we consider the existence of positive equilibria. In this case, we have . Substituting it into 1st line of (6) gives
The above equation has positive solutions only when , and in this case it has only one positive solution , where . Additionally, in other cases, there is no positive root. That is summarized in the following result.
Lemma 2.
Let . Then (5) has positive equilibria only when , and in this case, there is only one positive equilibrium , where with . Additionally, in other cases, there is no positive equilibrium.
3. Local Stability of Equilibria
The purpose of this section is to study the local stability of the equilibria obtained in Lemmas 1 and 2 one by one. Note that both and are in fact .
Theorem 1.
The trivial equilibrium of (5) is a stable node if or , a saddle-node if , and a saddle if .
Proof.
The Jacobian matrix of (5) at is
whose eigenvalues are and . If then and hence is a stable node while if then is a saddle as . What left is what happens when , as in this case . To study the stability of , we rescale t by and expand the resulting system from (5) in power series up to the third order around to get
where is a power series in with terms satisfying . By applying Theorem 7.1 of Chapter 2 in [38], we see that is a saddle-node if as the coefficient of , , is not 0; and is a stable node if as in this case that coefficient of is 0 but . □
Next, we consider .
Theorem 2.
The boundary equilibrium of (5) is a saddle-node if , but if then is a saddle.
Proof.
The Jacobian matrix at is given by
where . Recall that when exists we have which implies that . Thus the one eigenvalues of is .
(i) , then the discussion on the stability of is similar to the last part of the proof of Theorem (8).
We first translate into the origin by the transformation and expand the resulting system from (5) in power series up to the second order around the origin to get
where is a power series in with terms satisfying . Now we apply the transformation
and then the rescaling to transform (8) into the following standard form:
where is a power series in with terms satisfying . Since the coefficient of , is not 0, we know that is a saddle-node by Theorem 7.1 of Chapter 2 in [38].
(ii) and let ; then (8) change into the following form,
Let ; then we have the following implicit functions
and
By Theorems 7.2 and 7.3 and the corollary (see page 120 to 121) of Chapter 2 in [38], we have , ; , and thus is a saddle. The proof completes.
For the stability of , we note that the Jacobian matrix at is
where . Recall that exists when and . It follows that
As the two eigenvalues of are and , the following result follows immediately. □
Theorem 3.
The boundary equilibrium of (5) is always unstable. In particular, is an unstable node if , it is a saddle if , and it is a saddle-node if (this proof is similar to Theorem 1 (i)).
From the previous section, we can see that exists if and ; exists if and ; exists if and . Now, we study the stability of (, 4, 5). The Jacobian matrix at is
where for and 5 and . The eigenvalues of are and . As in the discussion for , one can easily show that by using the conditions guaranteeing its existence. Therefore, the following theorem summarizes the results on stability of .
Theorem 4.
For , 4, and 5, the boundary equilibrium of (5) is a saddle if ; it is a stable node if ; and it is a saddle-node if (this proof is similar to Theorem 1 (i)).
Finally, we consider the stability of the positive equilibrium .
Theorem 5.
The positive equilibrium of (5) is locally asymptotically stable if and unstable if .
Proof.
The Jacobian matrix of (5) at is
Note that
from the condition on the existence of and
It is easy to see that if , if , and if . Therefore, both eigenvalues of have negative real parts if , have positive real parts if , and have zero real parts if . Then the desired result follows. □
4. Global Asymptotical Stability of the Positive Equilibrium
In Theorem 5, we have shown that the positive equilibrium of system (5) is locally asymptotically stable if . In this section, we provide some sufficient conditions on its global stability.
Theorem 6.
Suppose . Then the positive equilibrium of system (5) is globally asymptotically stable in the interior of if one of the following conditions holds.
- (i)
- , , and ;
- (ii)
- , , and ;
- (iii)
- , , and .
Proof.
Note that, in addition to and , system (5) also has a boundary equilibrium when (i) holds, or when (ii) holds, or when (iii) holds. Under the conditions, both and (, 4, 5) are saddles, which are unstable, but is locally asymptotically stable. It is easy to see that all , , and (the interior of ) are positively invariant subsets of system (5). In order to show the global stability of in the interior of , we only need to exclude the existence of closed orbits in it. For this purpose, we denote
With the Dulac function , we have
in the interior of . By the Dulac Theorem, there is no closed orbit in the interior of . This completes the proof. □
5. Bifurcation Analysis
From the local stability analysis, we see that there are bifurcations occurring. In this section, we derive conditions on saddle-node bifurcation, transcritical bifurcation, and Hopf bifurcation.
Firstly, in order to prove the saddle-node bifurcation and transcritical bifurcation of system (5), we need the following Lemma (Sotomayor’s Theorem in [39,40]).
Theorem 7
Suppose at equilibrium holds. Additionally, assume that the matrix has one characteristic root , and both V and W are eigenvectors belonging to the eigenvalue of the matrix A and , respectively. Then
- (1)
- SupposeHence, when the bifurcation parameter μ has a critical value, that is, , system (10) undergoes a saddle-node bifurcation at .
- (2)
- SupposeHence, when μ is of a critical value, that is, , system (10) undergoes a transcritical bifurcation at .
By Table 1 of Lemma 2.1, when , system (5) has two boundary equilibria and if , has one boundary equilibrium if , and has no boundary equilibrium if . This suggests a bifurcation around . The above analysis indicates that we can choose the parameter m in the additive Allee effect as the bifurcation parameter to obtain saddle-node bifurcation.
Theorem 8.
Suppose and . Then (5) undergoes a saddle-node bifurcation from at .
Proof.
When and , (5) has the unique boundary equilibrium . We apply Lemma 3 to study the bifurcation around . Firstly, we easily see that the Jacobian matrix has the two eigenvalues and . Choose the eigenvectors V and W associated with the eigenvalue of and given respectively by
Define
Then
It follows that
Therefore, system (5) undergoes a saddle-node bifurcation at . □
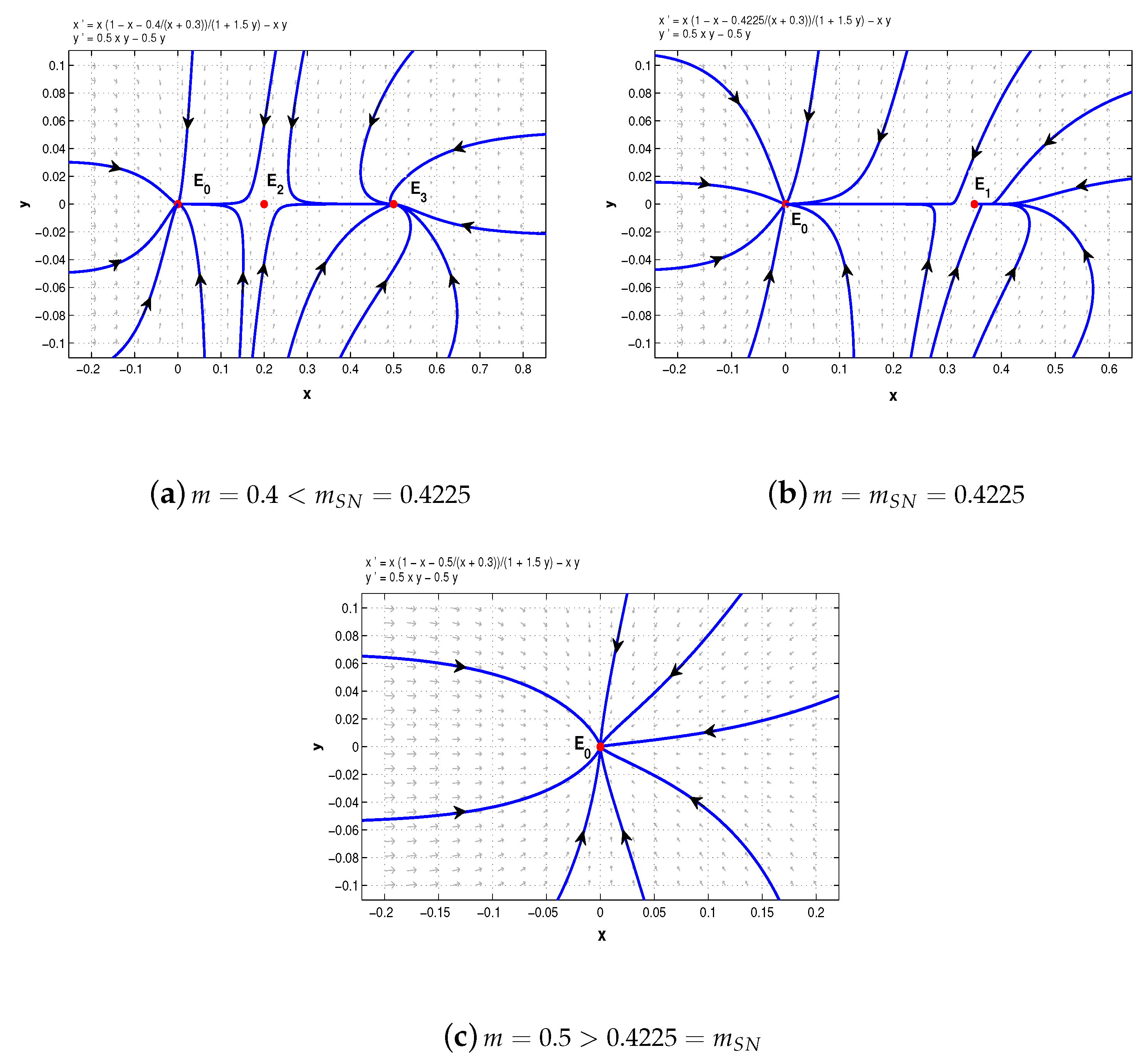
To illustrate the saddle-node bifurcation, we chose , , , , . Then . When , system (5) has two distinct boundary equilibria, and ; when , collapses to and only the boundary equilibrium remains. However, when , the boundary equilibrium also disappears (see Figure 1).
Next, by Table 1 of Lemma 2.1, system (5) has two boundary equilibria and if , has one boundary equilibrium ( and coincide)if , and has two boundary equilibria () and if . This suggests a bifurcation around . The above analysis indicates that we can choose the parameter a as the bifurcation produces transcritical bifurcation.
Theorem 9.
Suppose that . Then system (5) undergoes a transcritical bifurcation from at .
Proof.
The proof is similar to that of Theorem 7. We just verify the condition on transcritical bifurcation of Lemma 3. When , we have
whose eigenvalues are and . Choose the eigenvectors of and associated with the eigenvalue given respectively by
Let F be defined as in the proof of Theorem 7. Then
Then we easily see that V and W satisfy
Therefore, system (5) undergoes transcritical bifurcation from at .
With , , , , , Figure 2 shows the transcritical bifurcation with , , and .
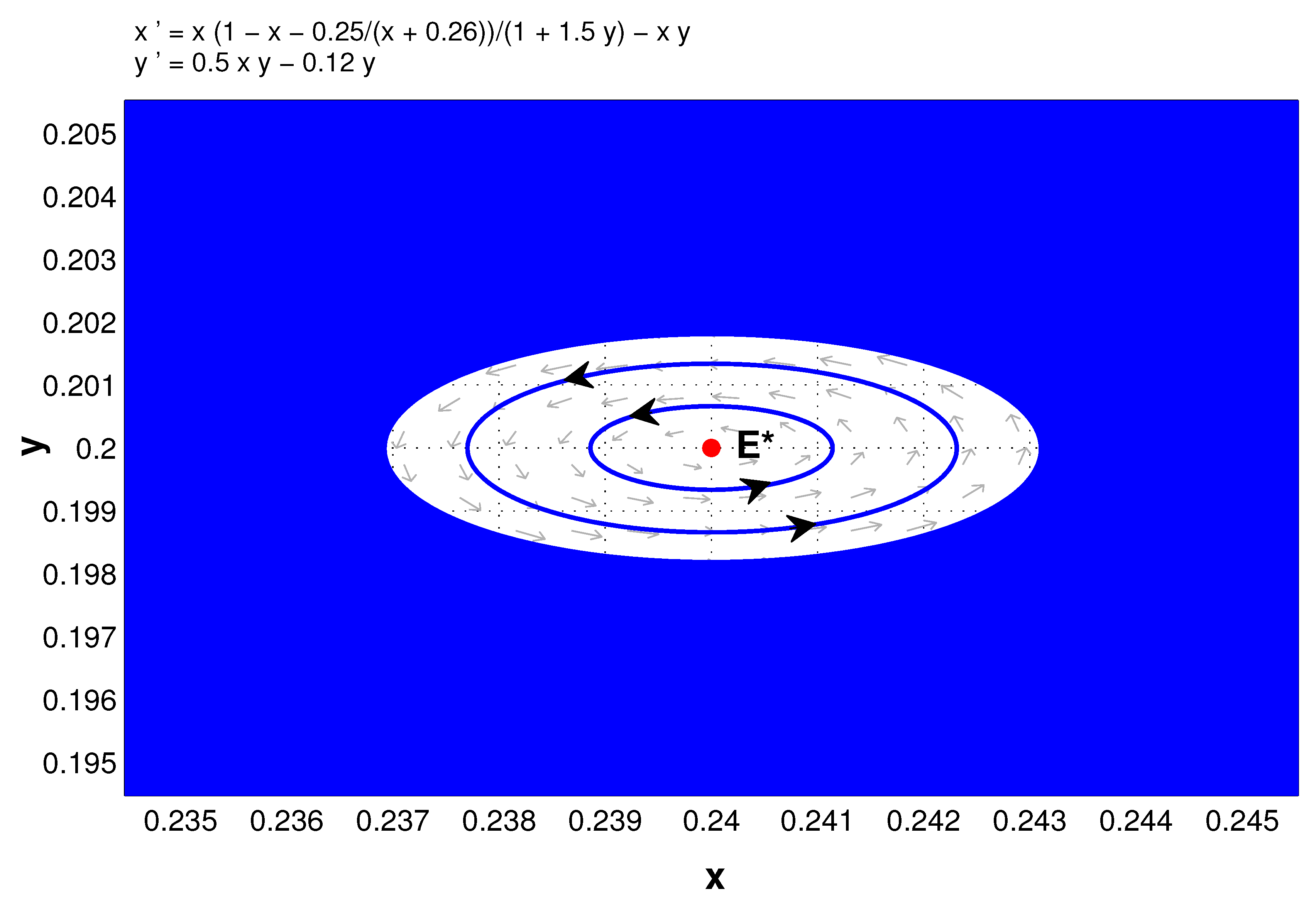
In the remainder of this section, we consider Hopf bifurcation. From Theorem 5 and its proof, it is easily concluded that the positive equilibrium of system (5) is locally asymptotically stable if , is a center if , and through Hopf bifurcation loses its stability under appropriate parameters. In the following we choose a as the bifurcation parameter to show that.
Theorem 10.
Under the assumptions on the existence of the positive equilibrium of system (5), that is, , then there is a supercritical Hopf bifurcation from at , where .
Proof.
Recall that the characteristic equation of the Jacobian matrix is
where
Clearly, is a center when and
Thus a Hopf bifurcation from occurs at . To discuss the stability (direction) of bifurcated periodic orbits, we compute the first Lyapunov number at as follows.
Firstly, we translate to the origin by the transformation and and rewrite the resultant system as
where
and is a power series in with terms satisfying . Let . Then
As , it follows from
that . Then his meas that is destabilized through a supercritical Hopf bifurcation at . □
6. Numerical Simulations
In Section 3 and Section 4, we studied the stability of the equilibria of system (5). In this section, we use numerical simulations to demonstrate different scenarios of the dynamics according to whether or not.
Example 1.
Firstly, we consider the following special case of system (5) with :
We distinguish four cases to illustrate the complicated dynamics of system (11).
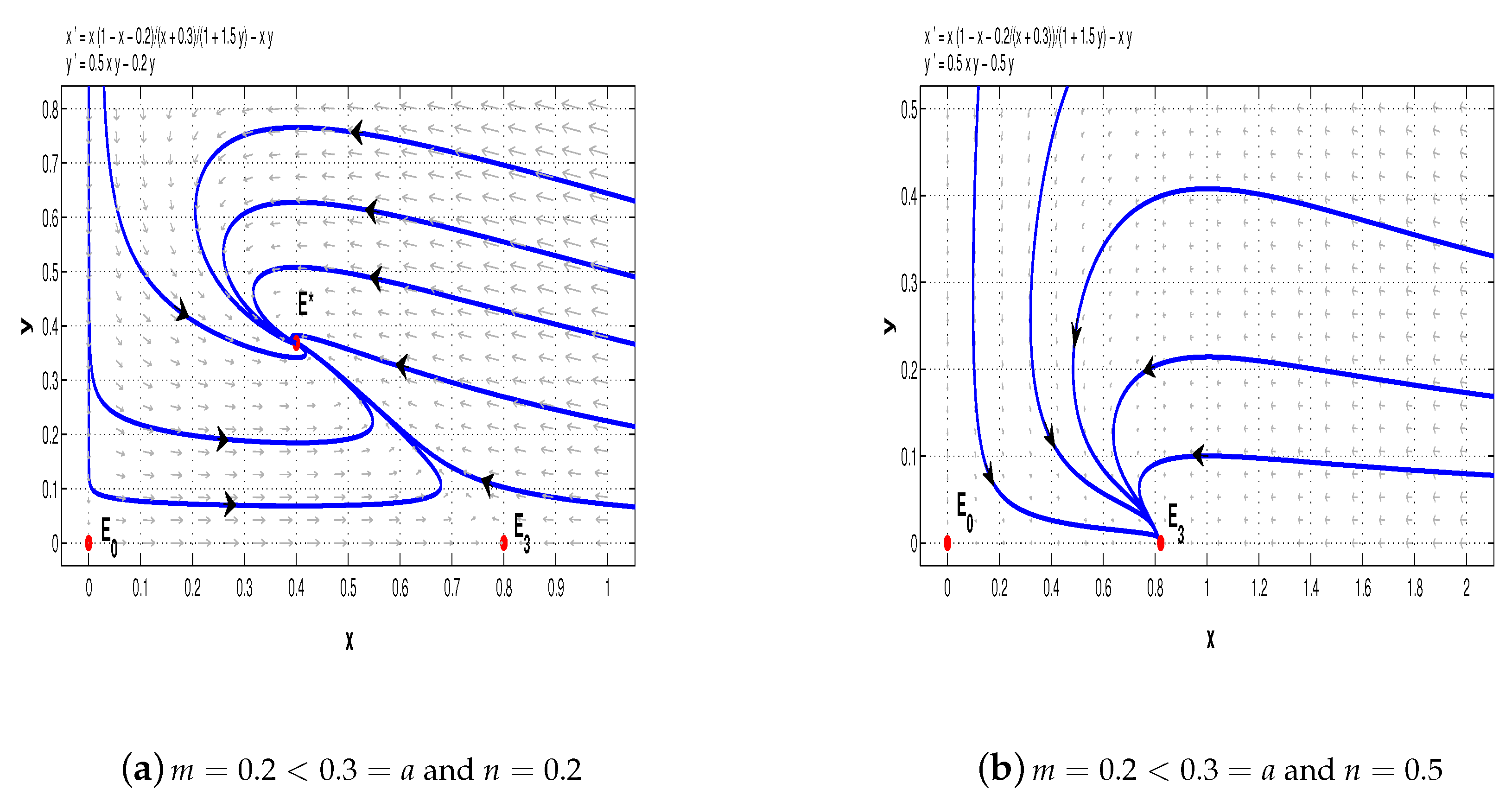
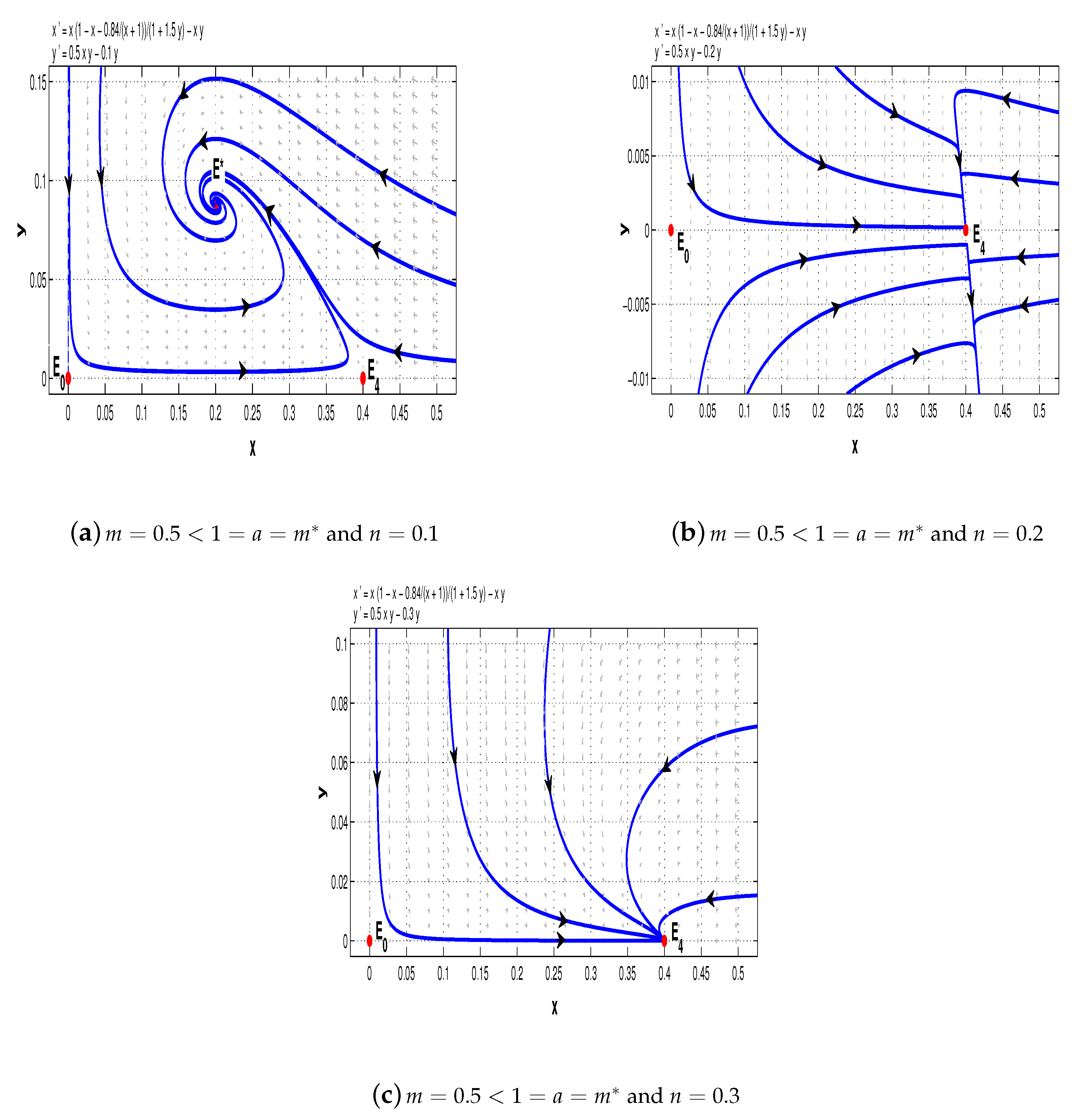
First, we choose . If , then the conditions of Theorems 1 and 4–6 are satisfied, and hence, for system (11), and are saddle points and is a stable node (see Figure 5a); but if , then is a saddle point and is a stable node (see Figure 5b).
Next, let . When , system (11) has a saddle-node (which coincides with ), a saddle point , and a stable node (see Figure 6a), while when , it has a saddle-node (coincides with ) and a stable node (see Figure 6b).
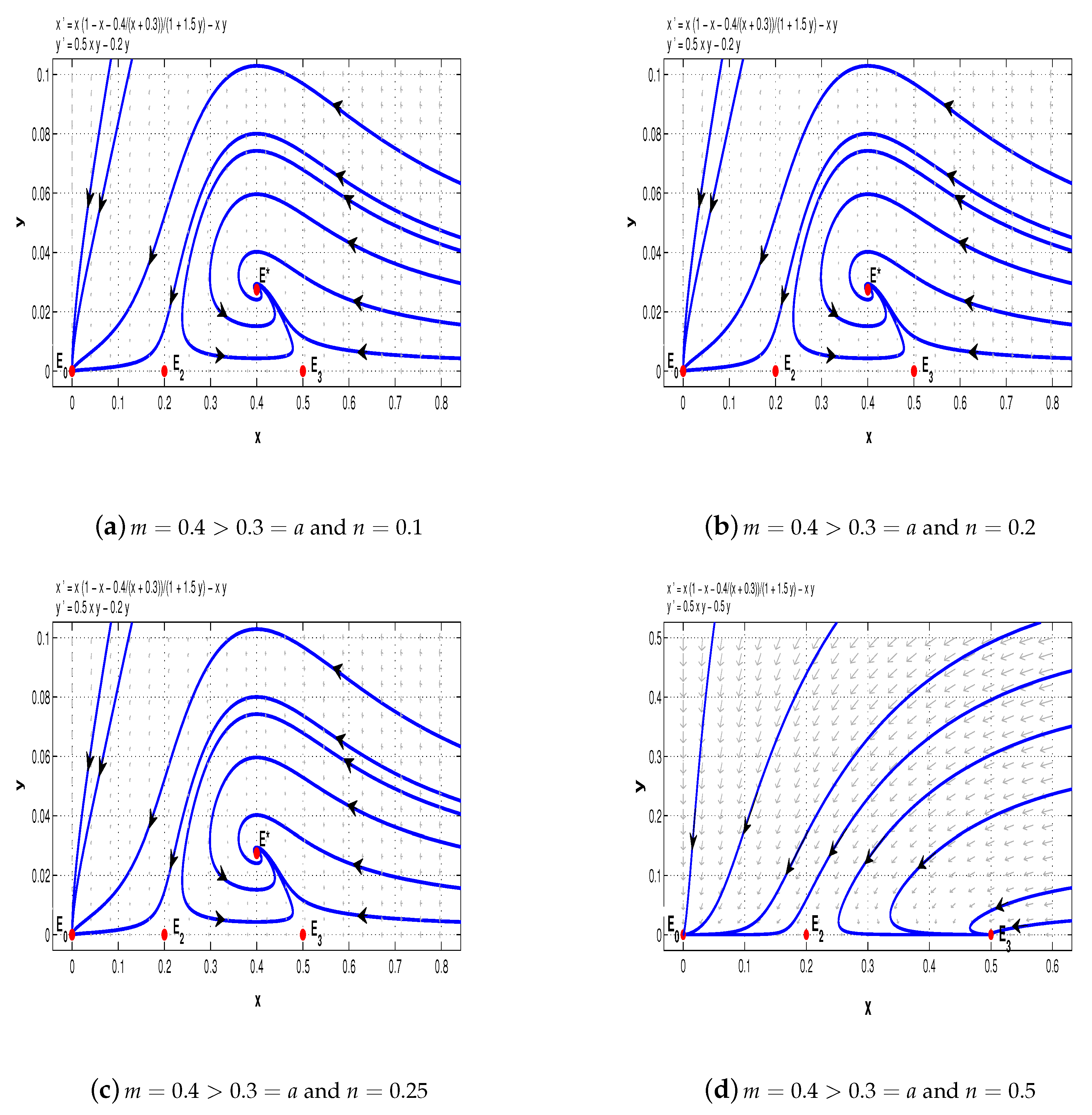
Now, take . When , system (11) has a stable node , a saddle-node , and a saddle (see Figure 7a); when , there is a stable node , two saddles and , and a stable node (see Figure 7b); when , is a stable node, is a saddle, and is a saddle-node (see Figure 7c); when , is a stable node, is a saddle, and is a stable node (see Figure 7d).
Finally, pick . When and , we see that the equilibrium of system (11) is a stable node and is a saddle-node (see Figure 8a,b); when , is also a stable node, however, is a saddle (see Figure 8c).
Example 2.
This time we let and consider the following system:
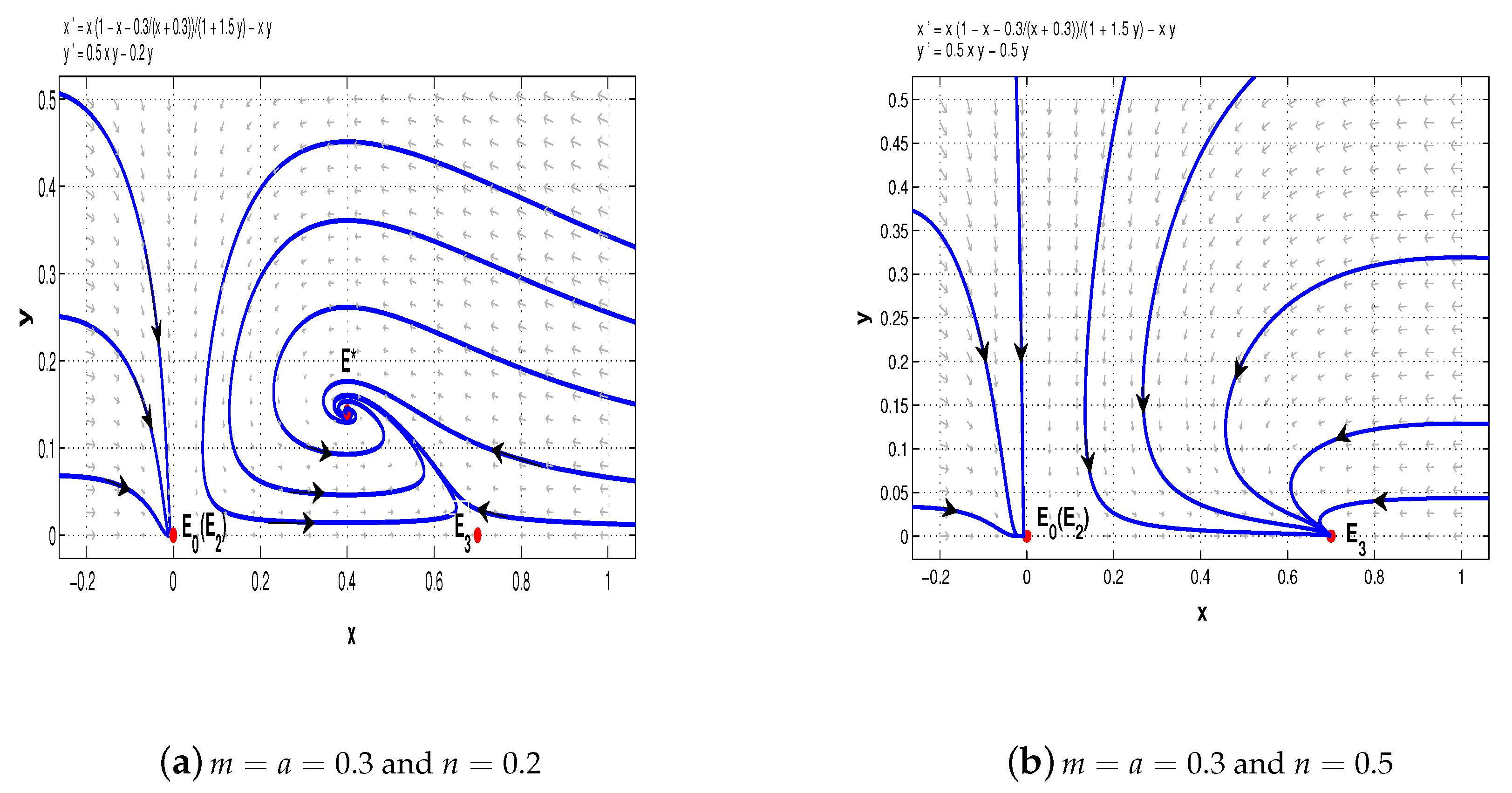
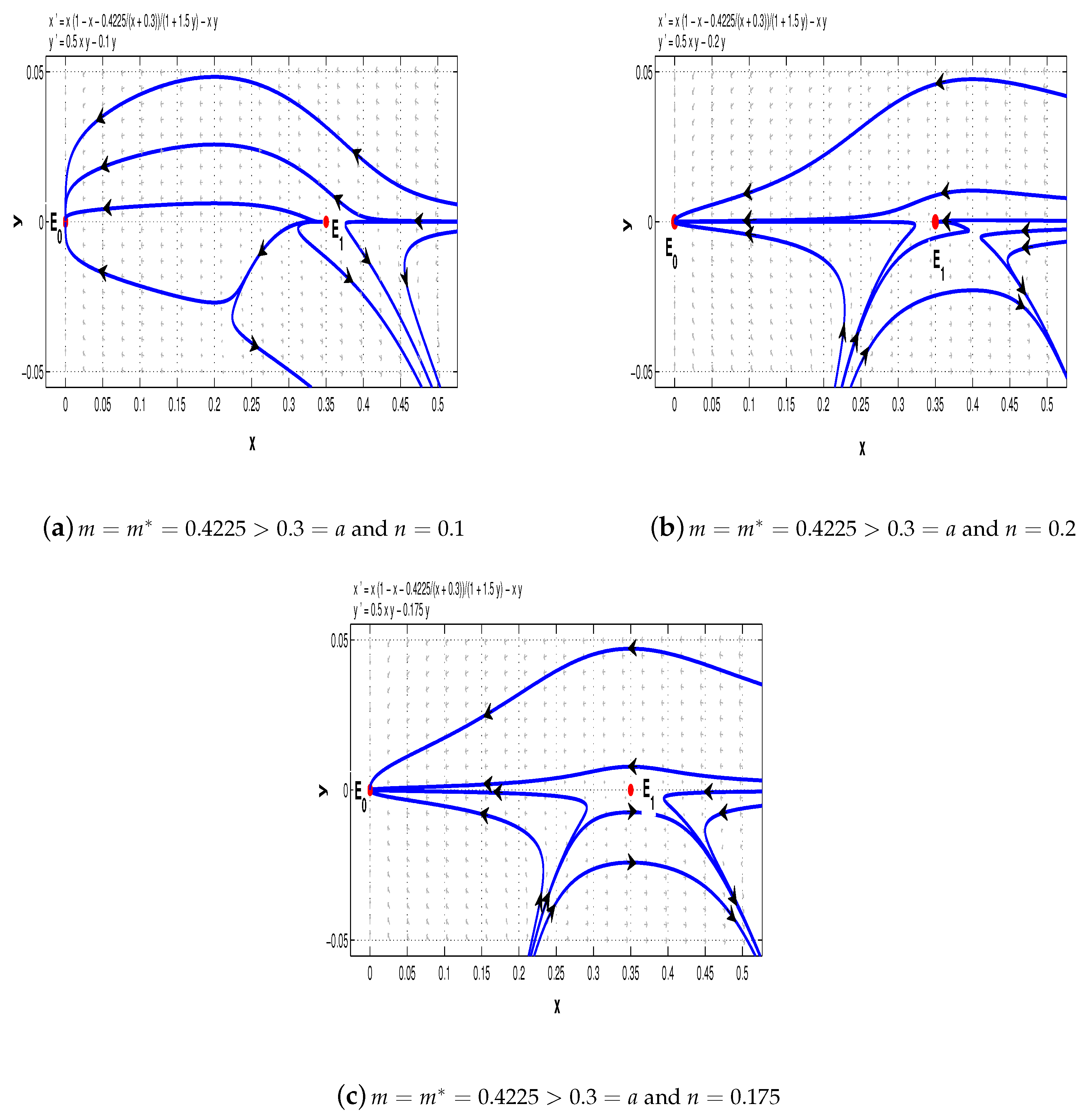
For system (12), we have . Choose . From Theorems 1, 4, and 5, we can see that when , it has two saddle points and , and a stable node (see Figure 9a); when , is a saddle and is a saddle-node (see Figure 9b); when , is a saddle and is a saddle-node (see Figure 9c).
Example 3.
Now we consider
where .
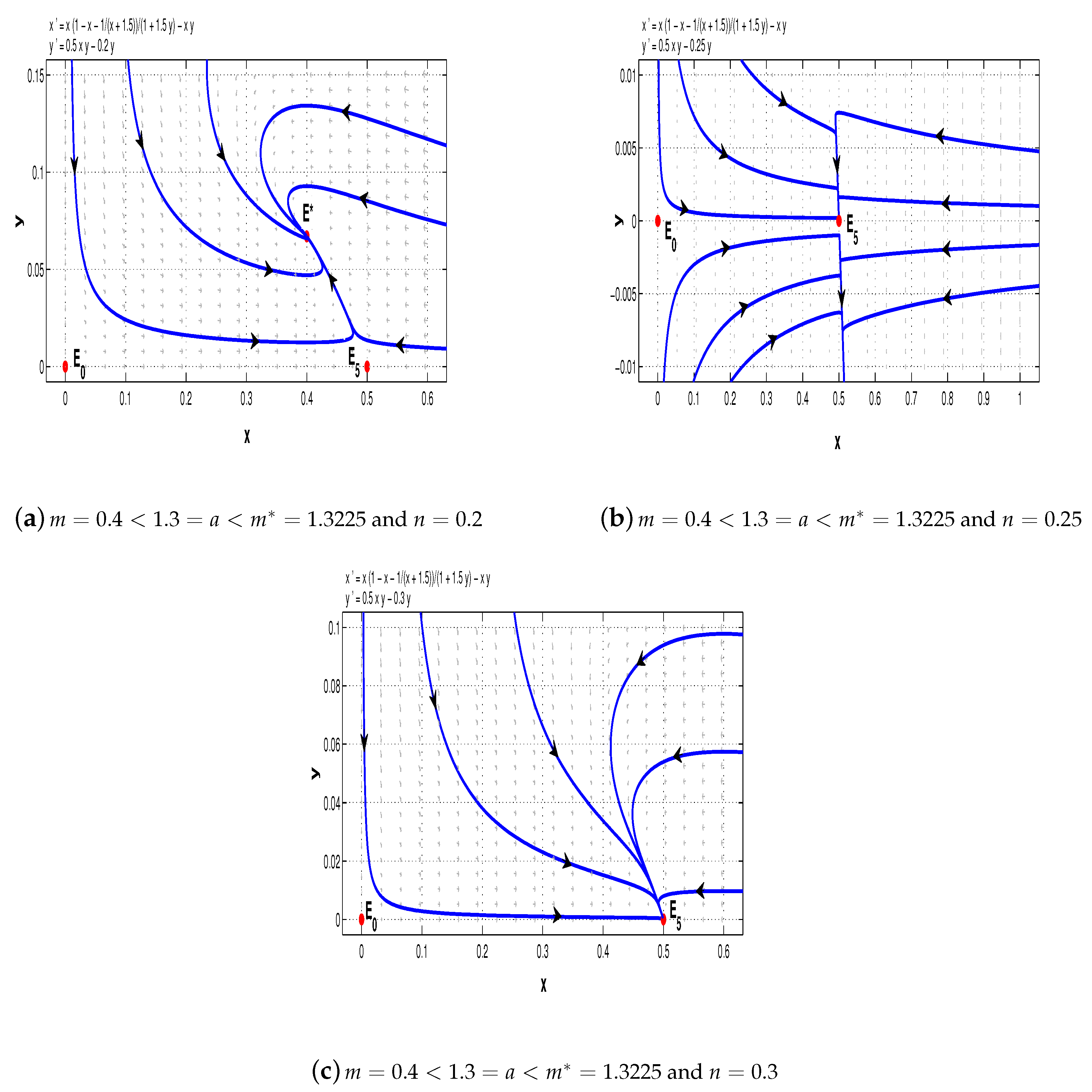
In this case, . Take . From Theorems 1, 4, and 5, we can know that we should let . Then system (13) has two saddle points and , and a stable node (see Figure 10a); when we let , it has a saddle point and saddle-node (see Figure 10b); but when we let , it has a saddle point and stable node (see Figure 10c).
7. Discussion and Conclusions
In this paper, we mainly focused on the impact of the additive Allee effect. In this section, we first discuss the influence of the fear effect on the coexistence of the two species. For this purpose, we regard and functions of f. Differentiating both sides of
with respect to f gives
It follows that
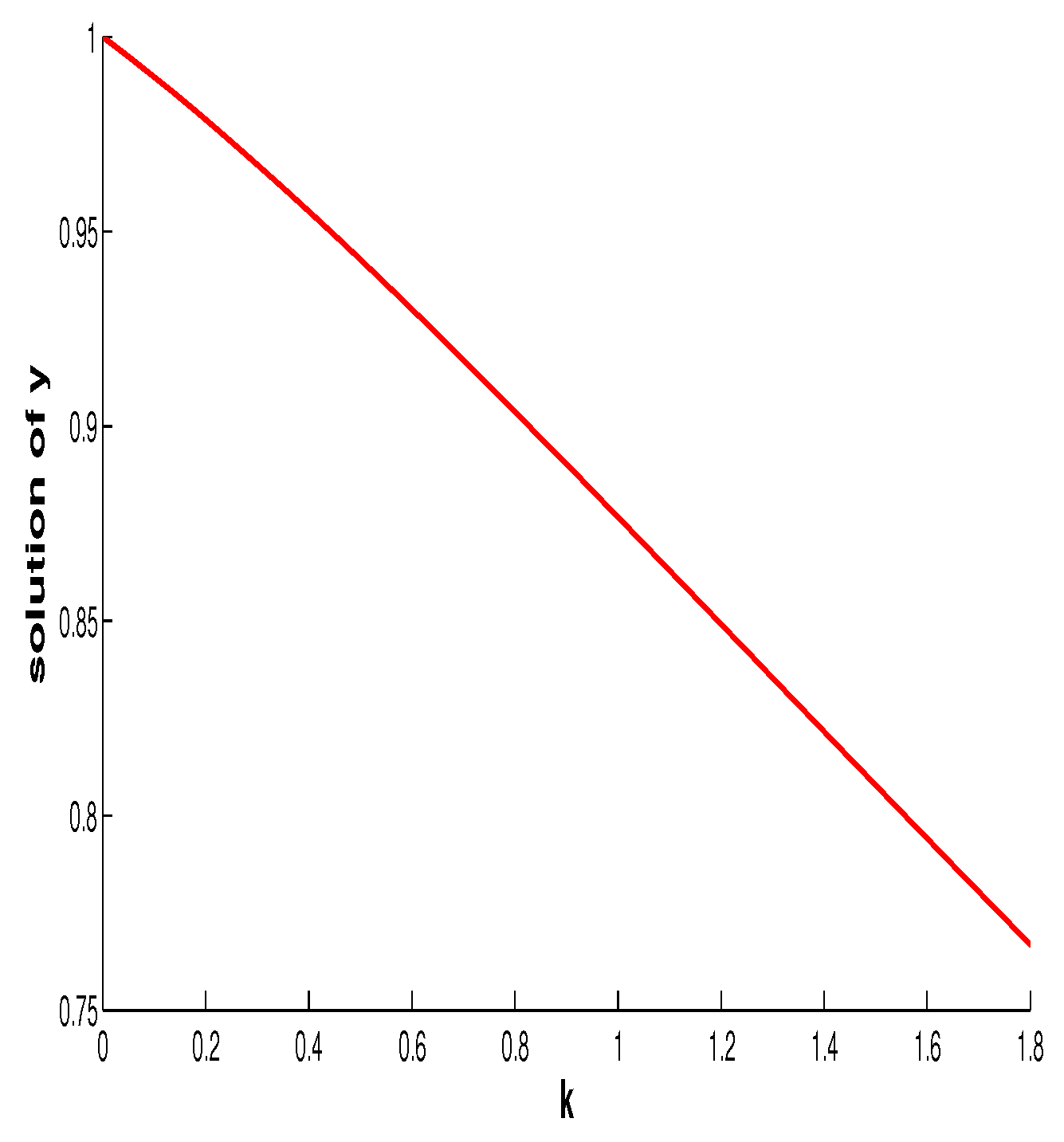
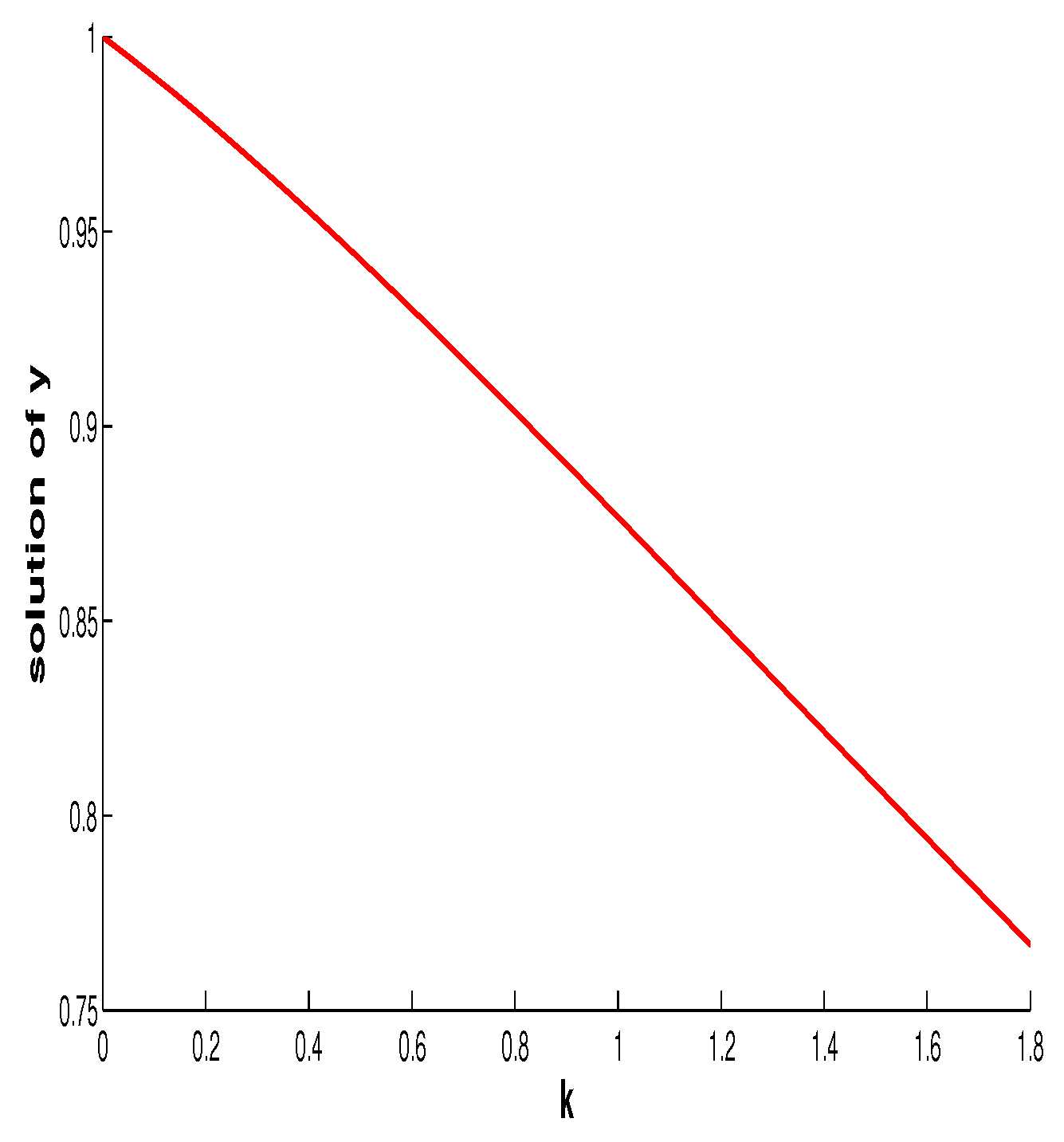
Thus the fear effect has no influence at the size of the prey at the coexistence equilibrium (final size of prey) but enhancing it will make the final size of the predator decease. This is the same as in [29,30]. Figure 11 shows the relationship between the intensity of fear effect and the final size of the predator.
We briefly summarize our findings to conclude this paper below.
In this paper, we proposed and studied a predator–prey model with the additive Allee effect and the fear effect. Though much has been done for predator–prey model with the Allee effect and the fear effect, to the best of our knowledge, the combined impact of these two factors has not been investigated. The findings here have some similarities and differences from those for system (4) with the strong Allee effect. For our model, both additive the Allee effect and the fear effect can affect the number and stability of equilibria. For example, the trivial equilibrium can be a stable node, or a saddle-node, or a saddle point. These results suggest possible bifurcations. By applying Sotomayor’s theorem, we established conditions for the occurrence of saddle-node bifurcation and transcritical bifurcation from boundary equilibria. We also studied Hopf bifurcation from the positive (or coexistence) equilibrium. By calculating the first Lyapunov number, we know that the Hopf bifurcation is supercritical. Finally, the fear effect only affects the final size of the predator. These results indicate that the additive Allee effect can produce much more complex dynamics that the multiplicative Allee effect can.
Author Contributions
All authors contributed equally to the writing of this paper. All authors have read and agreed to the published version of the manuscript.
Funding
This research was supported partially by the National Science Foundation of Fujian Province (2019J01841).
Acknowledgments
The authors are grateful to the referees for their useful suggestions which have significantly improved the paper. The authors appreciate the help of the editor.
Conflicts of Interest
The authors declare no conflict of interests.
References
- Allee, W.C. Animal Aggregations. In A Study in General Sociology; University of Chicago Press: Chicago, IL, USA, 1931. [Google Scholar]
- Stephens, P.A.; Sutherland, W.J. Consequences of the Allee effect for behavior, ecology and conversation. Trends Ecol. Evol. 1999, 14, 401–405. [Google Scholar] [CrossRef]
- Courchamp, F.; Berec, L.; Gascoigne, J. Allee Effects in Ecology and Conversation; Oxford University Press: Britain, UK, 2008. [Google Scholar]
- Luque, G.M.; Giraud, T.; Courchamp, F. Allee effects in ants. J. Anim. Ecol. 2013, 82, 956–965. [Google Scholar] [CrossRef] [PubMed]
- Bazykin, A.D. Nonlinear Dynamics of Inteiveracting Populations; World Scientific: Singapore, 1998. [Google Scholar]
- Dennis, B. Allee effects: Population growth, critical density, and the chance of extinction. Nat. Resour. Model. 1989, 3, 481–538. [Google Scholar] [CrossRef]
- Manna, K.; Banerjee, M. Stationary, non-stationary and invasive patterns for system with additive Allee effect in prey growth. Ecol. Complex. 1996, 36, 206–217. [Google Scholar] [CrossRef]
- Sen, M.; Banerjee, M.; Takeuchi, Y. Influence of Allee effect in prey populations on the dynamics of two-prey-one-predator model. Am. Inst. Math. Sci. 2018, 15, 883–904. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Liu, C.; Wang, L.P.; Lu, N.; Yu, L.F. Modelling and bifurcation analysis in a hybrid bioeconomic system with gestation delay and additive Allee effect. Adv. Differ. Equ. 2018, 2018, 1–28. [Google Scholar] [CrossRef]
- Xu, J.Y.; Zhang, T.H.; Han, H.A. A regime switching model for species subject to environmental nosises and additive Allee effect. Physica A 2019, 527, 121300. [Google Scholar] [CrossRef]
- Liu, Y.W. Bogdanov-Takes bifurcation with codimension three of a predator-prey system suffering the additive Allee effect. Int. J. Biomath. 2017, 10, 1–24. [Google Scholar] [CrossRef]
- Suryanto, A.; Darti, I.; Anam, S. Stability Analysis of a Fractional Order Modified Leslie-Gower Model with Additive Allee Effect. Hindawi 2017, 2017, 8273430. [Google Scholar] [CrossRef] [Green Version]
- Yu, T.T.; Tian, Y.; Guo, H.J.; Song, X.Y. Dynamical analysis of an integrated pest management predator-prey model with weak Allee effect. J. Biol. Dyn. 2019, 13. [Google Scholar] [CrossRef]
- Chen, B.G. Dynamics behaviors of a commensal symbiosis model involving Allee effect and one party can not survive independently. Adv. Differ. Equ. 2018, 2018, 1–12. [Google Scholar] [CrossRef]
- Wu, R.X.; Li, L.; Lin, Q.F. A Holling type commensal symbiosis model involving Allee effect. Commun. Math. Neurosci. 2018, 2018, 1–13. [Google Scholar]
- Liu, X.Y.G.Y.; Xie, X.D. Stability analysis of a Lotka-Volterra type predator-prey system with Allee effect on the predator species. Commun. Neurosci. 2018, 2018, 2052–2541. [Google Scholar]
- Guan, X.Y.; Chen, F.D. Dynamics analysis of a two species amensalism model with Beddington-DeAngelis functional response and Allee effect on the second species. Nonlinear Anal. Real World Appl. 2019, 48, 71–93. [Google Scholar] [CrossRef]
- Huang, X.Y.; Chen, F.D. The influence of the Allee effect on the dynamic behavior of two species amensalism system with a refuge for the first species. Adv. Appl. Math. 2019, 8, 1166–1180. [Google Scholar] [CrossRef]
- Cresswell, W. Predation in bird populations. J. Ornithol. 2011, 152, 251–263. [Google Scholar] [CrossRef]
- Peacor, S.D.; Peckarsky, B.L.; Trussell, G.C.; Vonesh, J.R. Costs of predator-induced phenotypic plasticity: A graphical model for predicting the contribution of nonconsumptive and consumptive effects of predators on prey. Oecologia 2013, 171, 1–10. [Google Scholar] [CrossRef]
- Pettorelli, N.; Coulson, T.; Durant, S.M.; Gaillard, J.M. Predation, individual variability and vertebrate population dynamics. Oecologia 2011, 167, 305–314. [Google Scholar] [CrossRef]
- Pettorelli, N.; Coulson, T.; Durant, S.M.; Gaillard, J.M. The many faces of fear: Comparing the pathways and impacts of nonconsumptive predator effects on prey populations. PLoS ONE 2008, 3, e2465. [Google Scholar]
- Svennungsen, T.O.; Holen, H.; Leimar, O. Inducible defenses: Continuous reaction norms or threshold traits? Am. Nat. 2011, 178, 397–410. [Google Scholar] [CrossRef] [Green Version]
- Pal, S.; Pal, N.; Samanta, S. Effect of hunting cooperation and fear in a predator-prey model. Ecol. Complex. 2019, 39. [Google Scholar] [CrossRef]
- Zhang, H.S.; Cai, Y.L.; Fu, S.M.; Wang, W.M. Impact of the fear effect in a prey-predator model incorporating a prey refuge. Appl. Math. Comput. 2019, 356, 328–337. [Google Scholar] [CrossRef]
- Xiao, Z.W.; Li, Z. Stability analysis of a mutual interference predator-prey model with the fear effect. J. Appl. Sci. Eng. 2019, 22, 205–211. [Google Scholar]
- Kundu, K.; Pal, S.; Samanta, S. Impact of fear effect in a discrete-time predator-prey system. Bulletion Calcutta Math. Soc. 2019, 110, 245–264. [Google Scholar]
- Pandy, P.; Pal, N.; Samanta, S.; Chattopadhyay, J. A three species food chain model with fear induced trophic cascade. Int. J. Appl. Comput. Math. 2019, 5, 100. [Google Scholar] [CrossRef]
- Wang, X.Y.; Zanette, L.N.; Zou, X.F. Modelling the fear effect in predator-prey interactions. J. Math. Biol. 2016, 73, 1179–1204. [Google Scholar] [CrossRef]
- Sasmal, S.K. Population dynamics with multiple Allee effects induced by fear factors—A mathematical study on prey-predator interactions. Appl. Math. Model. 2018, 64, 1–14. [Google Scholar] [CrossRef]
- Li, Z.; Han, M.A.; Chen, F.D. Almost periodic solutions of a discrete almost periodic logistic equation with delay. Appl. Math. Comput. 2014, 232, 743–751. [Google Scholar] [CrossRef]
- Chen, B.G. The influence of density dependent birth rate to a commensal symbiosis model with Holling type functional response. Eng. Lett. 2019, 27, 1–8. [Google Scholar]
- Chen, L.J.; Chen, L.J. Positive periodic solutions of a nonlinear integro-differential prey-competition impulsive model with infinite delays. Nonlinear Anal. Real World Appl. 2010, 11, 2273–2279. [Google Scholar] [CrossRef]
- Chen, L.J. Permanence for a delayed predator-prey model of prey dispersal in two-path environments. J. Appl. Math. Comput. 2009, 2010, 207–232. [Google Scholar]
- Wu, R.X. Permance of a nonlinear mutualism model with time varying delay. J. Math. Comput. Sci. 2019, 19, 129–135. [Google Scholar] [CrossRef]
- Li, Z.; Chen, F.D.; Han, M.A. Permance and global attractivity of a periodic predator-prey system with mutual interference and impulses. Commun. Nonlinear Sci. Numer. Simul. 2010, 2012, 743–751. [Google Scholar]
- Chen, B.G. Dynamics behaviors of a non-selective harvesting Lotka-Volterra amensalism model incorporating partial closure for the populations. Adv. Differ. Equ. 2018, 2018, 1–14. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Z.F.; Ding, T.R.; Huang, W.Z.; Dong, Z.X. Qualitative Theory of Differential Equation; Science Press: Beijing, China, 1992. (In Chinese) [Google Scholar]
- Sen, M.; Banerjee, M.; Morozov, A. Bifurcation analysis of a ratio-dependent prey-predator model with the Allee effect. Ecol. Complex. 2012, 11, 12–27. [Google Scholar] [CrossRef]
- Hu, D.P.; Cao, H.J. Stability and bifurcation analysis in a predator-prey system with Michaelis-Menten type predator harvesting. Nonlinear Anal. Real World Appl. 2017, 33, 58–82. [Google Scholar] [CrossRef]
Figure 1.
(a) Two distinct boundary equilibria and one trivial equilibrium when : there are two stable nodes and , and a saddle . (b) A boundary equilibrium and a trivial equilibrium when : is a saddle-node and is a stable node. (c) A trivial equilibrium when : is a stable node.
Figure 1.
(a) Two distinct boundary equilibria and one trivial equilibrium when : there are two stable nodes and , and a saddle . (b) A boundary equilibrium and a trivial equilibrium when : is a saddle-node and is a stable node. (c) A trivial equilibrium when : is a stable node.

Figure 2.
(a) Two distinct boundary equilibria and one trivial equilibrium when : two stable nodes and , and a saddle . (b) A boundary equilibrium and a trivial equilibrium when : is a stable node and is a saddle-node. (c) Two boundary equilibria and a trivial equilibrium when : is a saddle, both and are stable nodes.
Figure 2.
(a) Two distinct boundary equilibria and one trivial equilibrium when : two stable nodes and , and a saddle . (b) A boundary equilibrium and a trivial equilibrium when : is a stable node and is a saddle-node. (c) Two boundary equilibria and a trivial equilibrium when : is a saddle, both and are stable nodes.
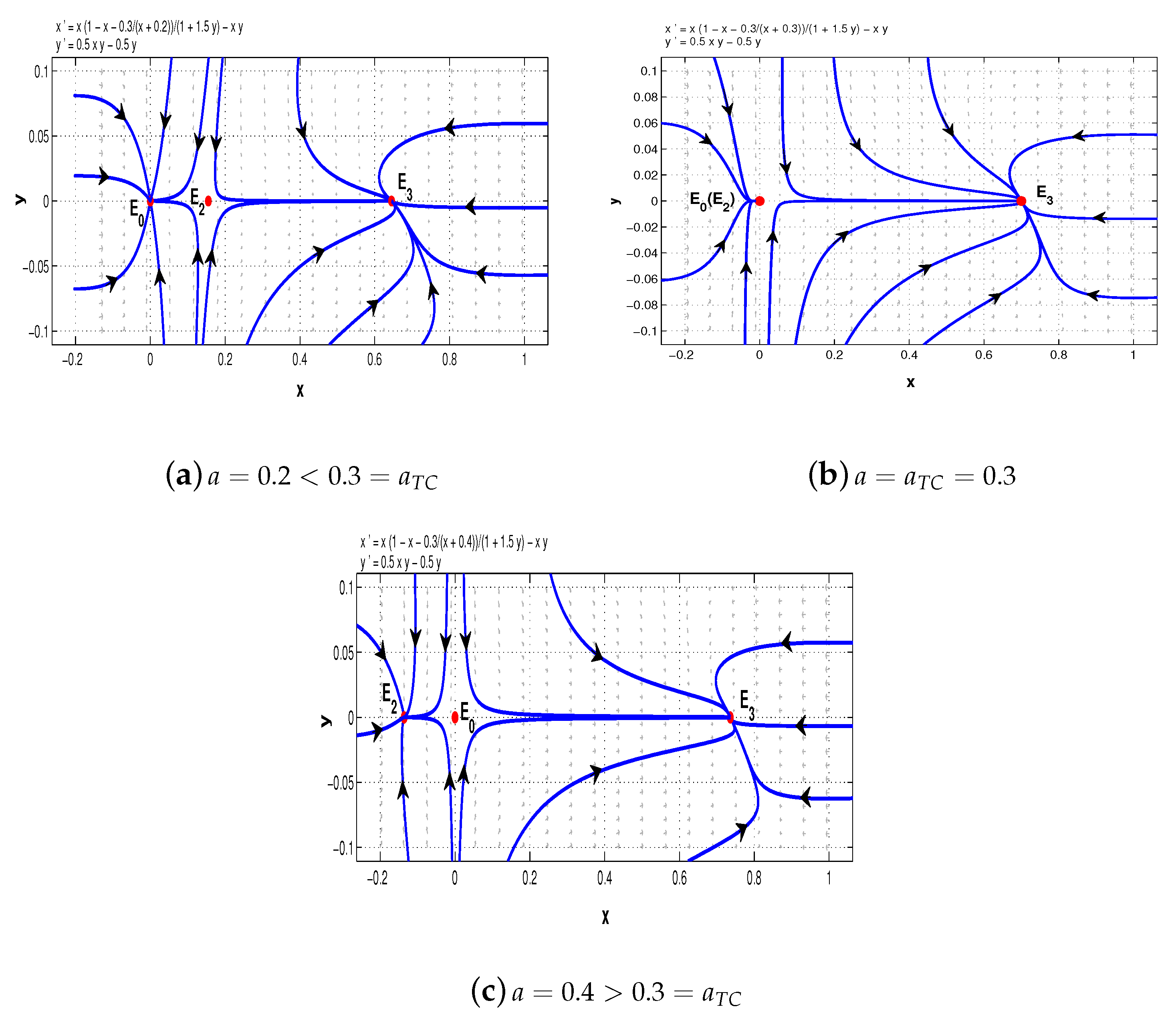
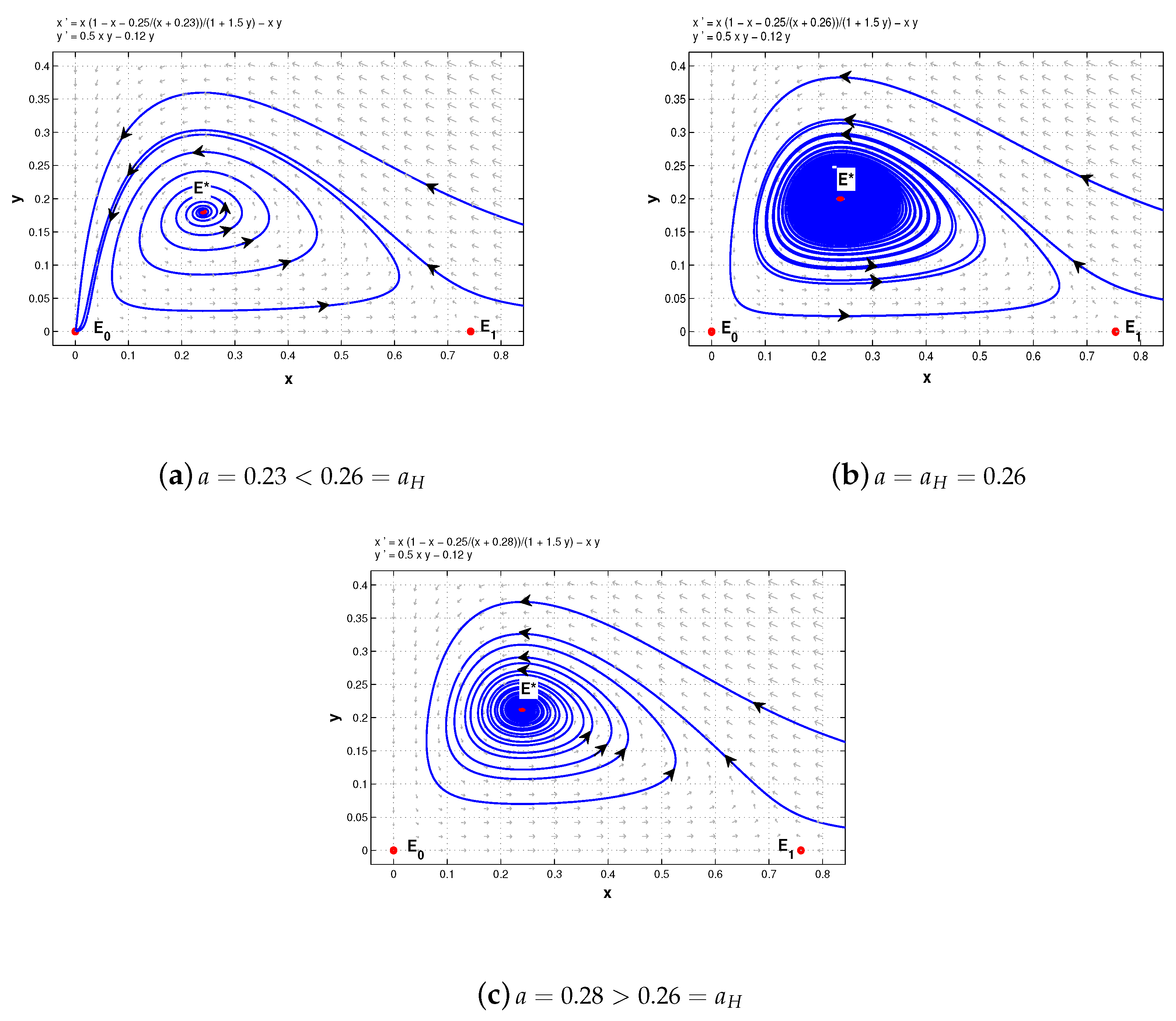
Figure 3.
(a) When , is unstable. (b) When , a stable periodic orbit bifurcated from . (c) When , is stable.
Figure 3.
(a) When , is unstable. (b) When , a stable periodic orbit bifurcated from . (c) When , is stable.

Figure 4.
When , a stable periodic orbit bifurcated form which is locally stable.
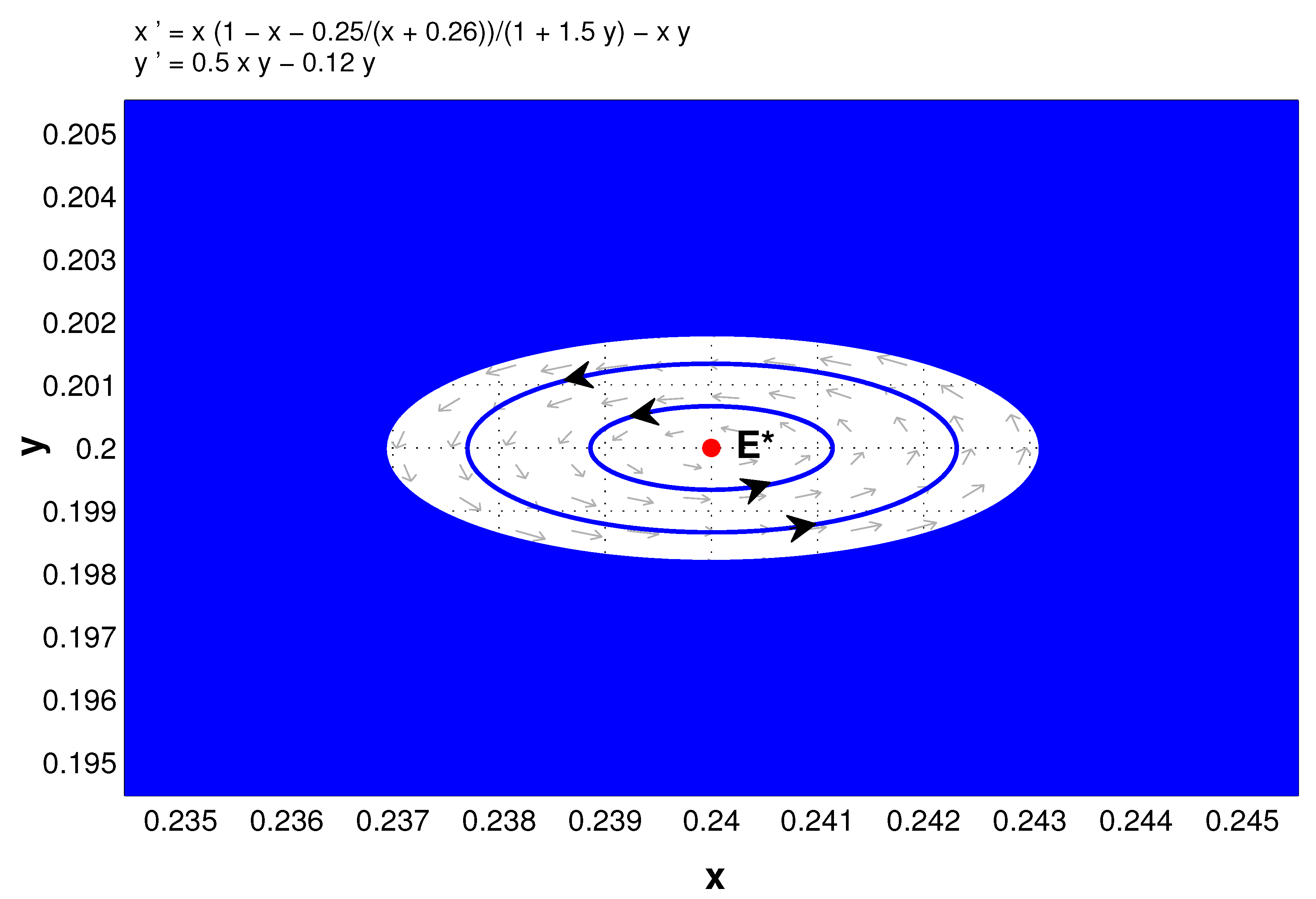
Figure 5.
(a) With and , and are saddle points. (b) With and , is a stable node.
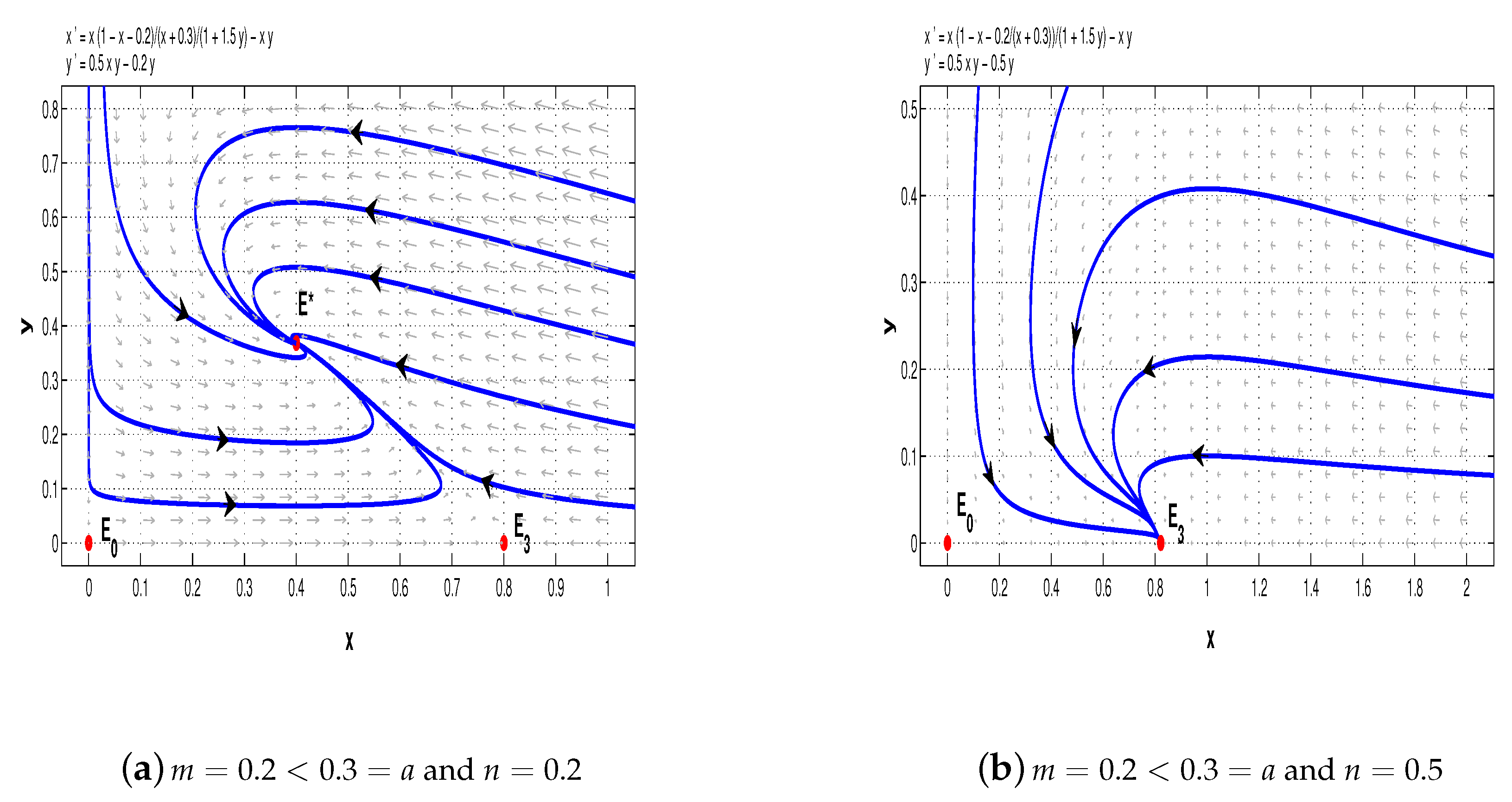
Figure 6.
(a) With and , is a saddle-node, is a saddle point, and is a stable node. (b) With and , is a saddle node and is a stable node.
Figure 6.
(a) With and , is a saddle-node, is a saddle point, and is a stable node. (b) With and , is a saddle node and is a stable node.
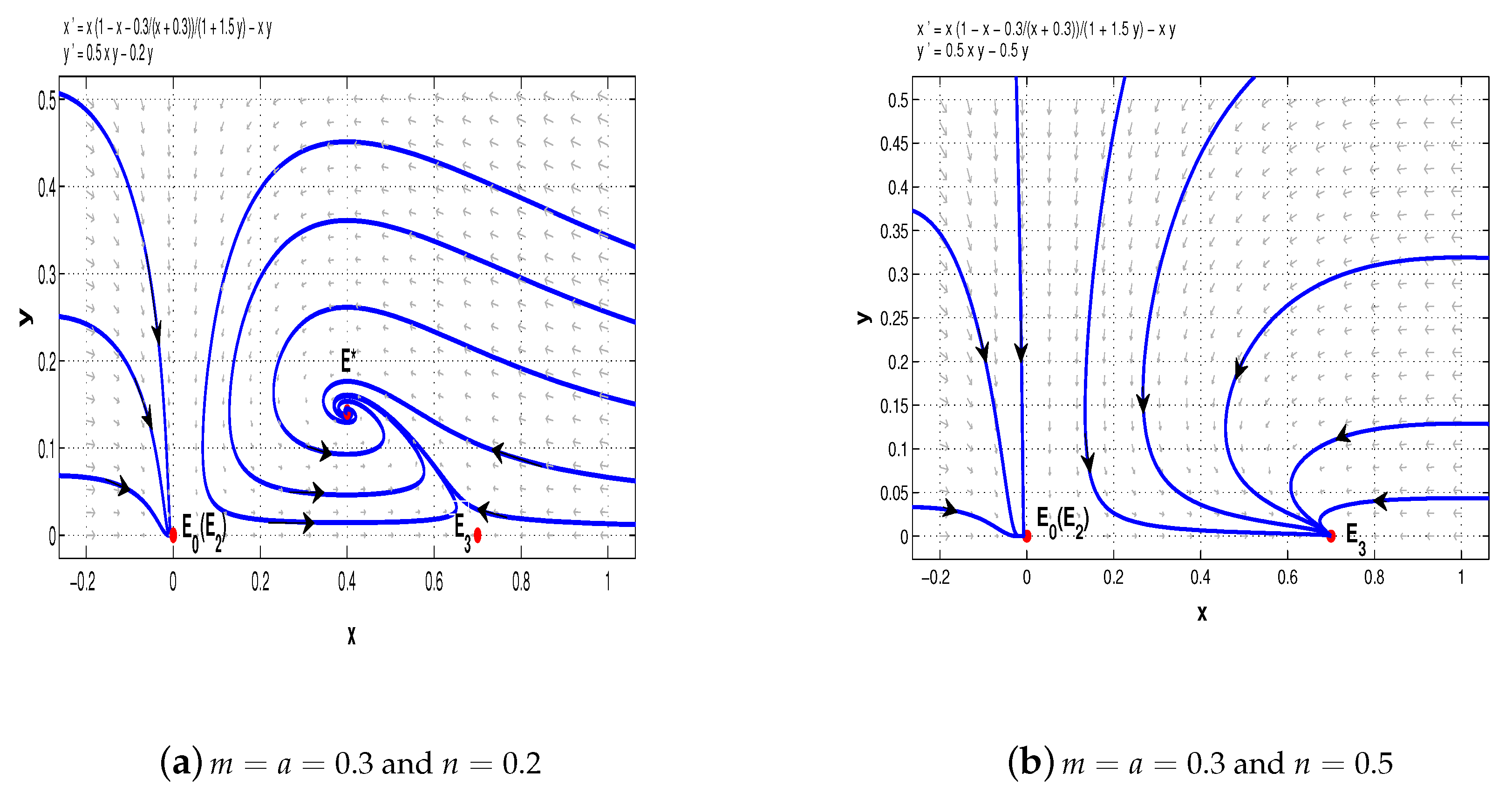
Figure 7.
(a) With and , there is a stable node , a saddle-node , and a saddle . (b) With and , there is a stable node , two saddles and , and a stable node . (c) With and , there is a stable node , a saddle , and a saddle-node . (d) With and , there is a stable node , a saddle , and a stable node .
Figure 7.
(a) With and , there is a stable node , a saddle-node , and a saddle . (b) With and , there is a stable node , two saddles and , and a stable node . (c) With and , there is a stable node , a saddle , and a saddle-node . (d) With and , there is a stable node , a saddle , and a stable node .

Figure 8.
(a) When and , is a stable node and is a saddle-node. (b) When and , is a stable node and is a saddle-node. (c) When and , is a stable node and is a saddle.
Figure 8.
(a) When and , is a stable node and is a saddle-node. (b) When and , is a stable node and is a saddle-node. (c) When and , is a stable node and is a saddle.

Figure 9.
(a) When and , there are two saddle points and , and a stable node . (b) When and , is a saddle and is a saddle-node. (c) When and , is a saddle and is a stable node.
Figure 9.
(a) When and , there are two saddle points and , and a stable node . (b) When and , is a saddle and is a saddle-node. (c) When and , is a saddle and is a stable node.
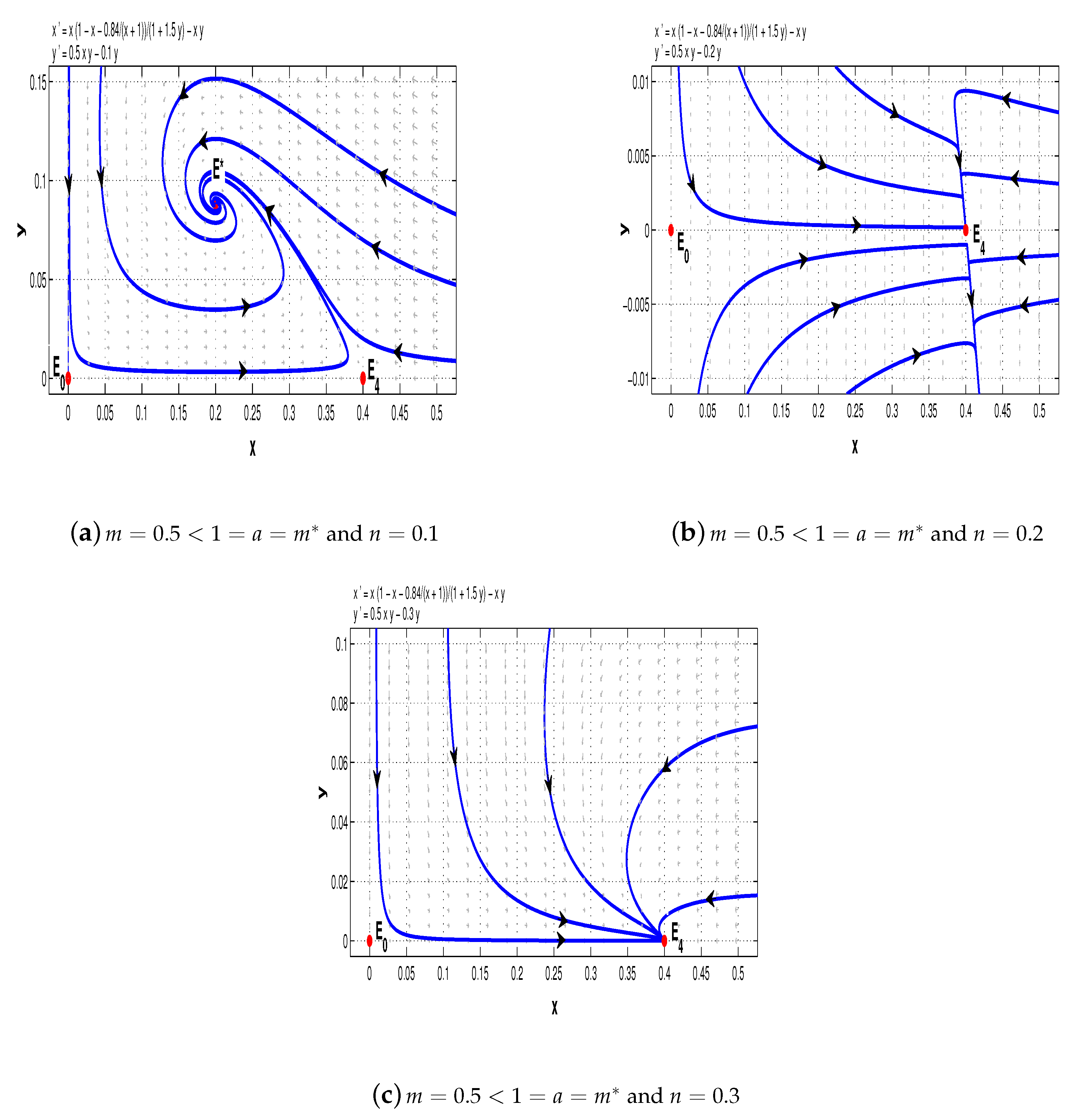
Figure 10.
(a) When and , both and are saddle points and is a stable node. (b) When and , is a saddle point and is a saddle-node. (c) When and , is a saddle point and is a stable node.
Figure 10.
(a) When and , both and are saddle points and is a stable node. (b) When and , is a saddle point and is a saddle-node. (c) When and , is a saddle point and is a stable node.

Figure 11.
Relationship between the fear effect intensity and the final size of the predator.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
Boundary equilibria besides of (5) with .
| Condition | Boundary Equilibria |
|---|---|
| No | |
| and | |
| ( and coincide) | |
| () and |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Lai, L.; Zhu, Z.; Chen, F. Stability and Bifurcation in a Predator–Prey Model with the Additive Allee Effect and the Fear Effect. Mathematics 2020, 8, 1280. https://doi.org/10.3390/math8081280
AMA Style
Lai L, Zhu Z, Chen F. Stability and Bifurcation in a Predator–Prey Model with the Additive Allee Effect and the Fear Effect. Mathematics. 2020; 8(8):1280. https://doi.org/10.3390/math8081280
Chicago/Turabian StyleLai, Liyun, Zhenliang Zhu, and Fengde Chen. 2020. "Stability and Bifurcation in a Predator–Prey Model with the Additive Allee Effect and the Fear Effect" Mathematics 8, no. 8: 1280. https://doi.org/10.3390/math8081280
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.