1. Introduction
Vibration is often the direct cause of malignant damage to most engineering structures such as aviation, aerospace, vessel, mechanical, electron, large bridges and super high-rise buildings [
1,
2,
3]. Therefore, vibration design and control are critical in large structural designs. In order to combat undesirable effects of vibrations, caused by a few undesired eigenvalues of the systems, we need to reassign those undesired eigenvalues, leaving the rest unchanged, by using a suitable feedback control. This is a possible way to construct feedback control, especially leasing the rest eigenpairs unchanged. However, in the process of structural vibration control, each link, such as the measurement of the sensor, the calculation of the processor and the drive of the actuator, would consume time, resulting in a time delay of the control force.
In this paper, we consider the following gyroscopic second-order systems in control
where
are, respectively, mass, gyroscopic and stiffness matrices with
M symmetric positive definite,
G skew-symmetric and
K symmetric nonsingular,
and its time derivatives are vectors of displacement, velocity and acceleration respectively.
is the full column rank control matrix,
is the control vector and
is time delay. The associated open loop pencil is given by
.
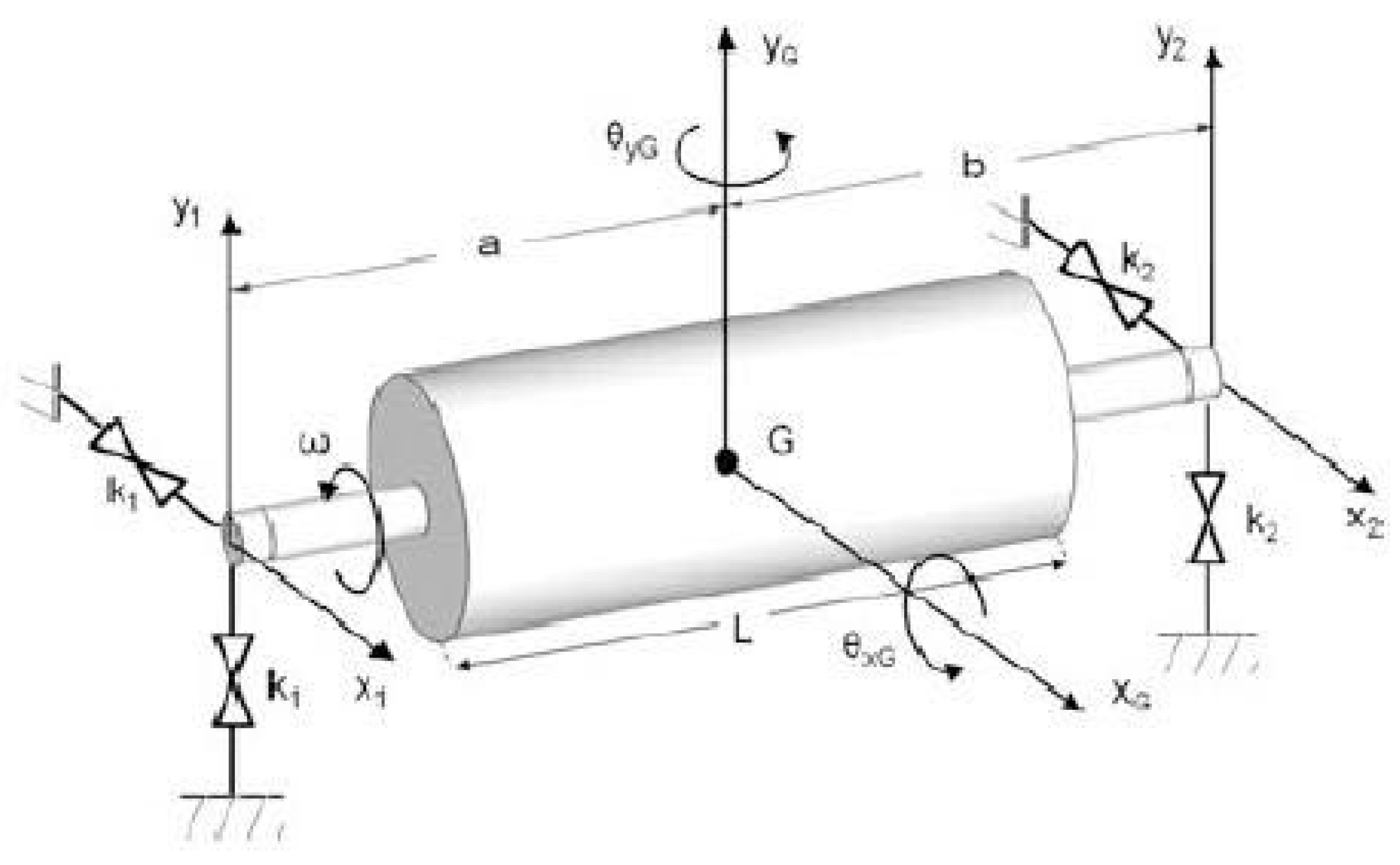
In practice, helicopter rotor blades or spin stabilized satellites with elastic appendages such as solar panels or antennas can be seen as the gyroscopic systems. In general, gyroscopic systems are second-order systems, and the problems of gyroscopic second-order systems have aroused much public attention [
4,
5,
6].
One of feedback control is the following state feedback control
where
are, respectively, acceleration, velocity, displacement state feedback matrices. In order to design the controller conveniently, the feedback matrices
are constant matrices [
7,
8]. Note that Equation (
1) can be replaced by the following equation
Separation of variables
where
, then Equation (
3) yields the associated quadratic eigenvalue problem with time delay
where
.
For
= 0, Datta, Ram and Sarkissian [
9] solved the multi-input partial pole placement problem for undamped gyroscopic systems and gave the explicit solution of this problem. However, the gyroscopic second-order systems with time delay may have infinite eigenvalues so that the solution space of feedback systems with time delay may have infinite basis. This is the essential difference from feedback systems without time delay. The time delay not only weakens the dynamic characteristics of the control systems, furthermore, it causes a series of problems such as system stability and bifurcation. The partial eigenvalue assignment problem for gyroscopic second-order systems with time delay is to find the matrices
such that a few undesired eigenvalues of the open loop pencil
are altered as required and the resting eigenpairs remain unchanged. These lead to the following problem.
Problem GPEAP-TD. Given the system matrices
with
M symmetric positive definite,
G skew-symmetric and
K symmetric nonsingular, the full column rank control matrix
,
is the time delay, and given the self-conjugate subset
of the open-loop eigenvalues
and the corresponding eigenvector set
and a self-conjugate set
, find the state feedback matrices
such that the closed-loop pencil
has the desired eigenvalues
, and the eigenpairs
.
Note that the number of eigenvalues of the open loop pencil
is finite, but the number of eigenvalues of
is infinite. Problem GPEAP-TD is to find state feedback matrices
, such that the
eigenpairs of
remain unchanged. One method for solving the Problem GPEAP-TD is to transform the quadratic control problem to a standard first-order control problem and then solve the partial eigenvalue assignment problem for the first-order systems. However, there are several computational problems with this approach. For instance, it would compute the inverse of mass matrix, which may be ill-conditioned. Moreover, this transformation would, in most cases, destroy all the matrix structures inherent in most practical problems, such as symmetry, definiteness, sparsity, etc. [
10]. Ram and Mottershead first proposed the receptance method in active vibration control [
11] and solved the multi-input partial pole placement with active vibration control by using the receptance method [
12]. The research of receptance method can be seen in [
13,
14,
15,
16]. For gyroscopic systems, Datta [
17] researched the spectrum modification and further extended to the distributed parameter systems [
18]. Liu [
19] proposed a multi-step method for solving the partial quadratic eigenvalue problem with time delay.
Our main contribution in this paper is to give the solvable conditions and explicit solutions to Problem GPEAP-TD, and construct a new multi-step method for solving this problem. Our method only need solve the small scale linear systems so that the computational costs are much lower than that of the traditional multi-step method.
The following notations will be used in this paper. The eigenvalues of the open-loop pencil are , and the corresponding eigenvectors are . We let
, whose diagonal elements are eigenvalues of the open-loop systems.
, whose diagonal elements are the eigenvalues to be altered.
, whose diagonal elements are the eigenvalues kept unchanged.
, whose diagonal elements are the eigenvalues to be assigned.
, whose columns are corresponding eigenvectors of the eigenvalues in .
, whose columns are corresponding right eigenvectors of the open-loop systems.
.
.
represents the unit matrix of order n.
represents the product of the matrix A and the matrix B.
represents the product of the matrix A and the matrix B.
Throughout this paper, we use the following assumptions.
- (1)
The system (1) is partially controllable with respect to ;
- (2)
; ; ;;
- (3)
are all distinct;
- (4)
are finite eigenvalues.
2. Materials and Methods
2.1. Single-Input Control
We first solve Problem GPEAP-TD by single-input state feedback control, that means
Lemma 1. [
20]
(The conception of partially controllability) The system (1) is partially controllable with respect to the subset of the spectrum of if it is controllable with respect to each of the eigenvalues . Lemma 2. [
21]
Suppose that the eigenvalues of the open-loop pencil are partitioned into the disjoint sets and , that is , then From lemma 1, we have the following theorem.
Theorem 1. Given with M symmetric positive definite, G skew-symmetric and K symmetric nonsingular, , the self-conjugate subset of the open-loop spectrum and the corresponding eigenvector set . Definewhere , then Proof. Use the orthogonality relation (7), and consider the
is eigenpairs of systems
,
we have
the Theorem 1 is proved. □
In order to solve Problem GPEAP-TD completely, we need to choose
, such that
Substituting for
, we have
where
Let
and choose
, then
First, we can prove that the vectors
obtained by this way are real vectors. Since the sets
and
are self-conjugate, considering the matrices
are real, we have
where
is a nonsingular permutation matrix. Similarly, there exists a nonsingular permutation matrix
such that
Conjugating (13) and (14), we get
which implies
. Therefore
which implies
are real.
Therefore we give the following theorem.
Theorem 2. If the system (M,G,K) is partially controllable with respect to the subset , , , and ; are all distinct, assume that are finite eigenvalues, then
(1) For any arbitrary vector , the closed-loop pencil has eigenpairs , where the feedback vectors are defined by (8).
(2) Let satisfyDefine then H is nonsingular and Problem GPEAP-TD has a solution in the form (8), where ϕ is a solution of the linear systems (14). Proof. The first part can be proved by Theorem 1. From (11) and
, we have
for
. Since
and
, then the linear systems (15) has a solution
.
From (13), we have
where
is the entry in the
r-th row and
s-th column of matrix
H.
Since
Then
Multiplying both sides by
, we get
Adding
to both sides, we obtain
Transposing the above formula, we can get
Substituting (15) and (17) into (16), we have
it follows that
where
Since
is a Cauchy matrix and
, then
is nonsingular. Note that the system (1) is partially controllable with respect to the subset
, then we can get
[
18]. According to the assumption,
,
, then
,
are also nonsingular, therefore
H is nonsingular and the linear systems (14) has a unique solution
. □
Therefore, are the solutions to Problem GPEAP-TD by single-input state feedback control.
Based on Theorem 1, we can get the following Algorithm 1.
| Algorithm 1: An algorithm for Problem GPEAP-TD by single-input control. |
Input:The real matrices with M symmetric positive definite, G skew-symmetric and K symmetric nonsingular; The control vector b and the time delay ; The self-conjugate subset of the open-loop spectrum and a self-conjugate set . Assume that are all distinct.
Output:Find the state feedback vectors such that the closed-loop pencil has the desired eigenvalues and the eigenpairs .
- 1:
Form ; - 2:
Form ; - 3:
Form ; - 4:
fordo - 5:
Solve for : ; - 6:
end for - 7:
Compute ; - 8:
Form ; - 9:
Compute : ; - 10:
Compute :
|
2.2. Multi-Input Control
In this section, we consider Problem GPEAP-TD by multi-input state feedback control. Note that Equation (
3) is equivalent to
where
and
are the
k-th columns of
B and
respectively. The associated closed-loop pencil is given by
Define
where
. Note that
. Let
and
. Therefore, the Problem GPEAP-TD is equivalent to the following problem.
Problem MGPEAP-TD. Given
. Let
and
be defined by (22) and (23) respectively. For
, find the feedback vectors
such that the single-input closed-loop pencil
has the desired eigenvalues
and the eigenpairs
.
Define
where
is arbitrary.
Theorem 3. If are not the eigenvalues of the system , , , and are all distinct, then
(1) For and any arbitrary vector , the closed-loop pencilhas eigenpairs , where the feedback vectors are defined by (25). (2) Let are the eigenpairs of the closed-loop pencil . Define
andchoose such that is nonsingular, then Problem MGPEAP-TD has a solution in the form (25), where is a solution of the linear systems . Proof. By Theorem 1, we have
which proves the first part of Theorem 3. Since
are the eigenpairs of the closed-loop pencil
, and in order to solve Problem MGPPAP-TD completely, we need to choose
, such that
Substituting for
, we have
where
Choose
, then
Since the coefficient matrix of linear Equation (29) is nonsingular, We can get
. Let
then
which means
is a solution of the linear systems (31). □
Note: We can choose such that are not eigenvalues of the system , then is nonsingular. This is an easy way for choosing . Another method is choosing , and we need to verify whether is nonsingular.
The traditional muti-step method need to solve which requires flops, which requires flops, which requires flops. In general, , the total computational costs are . In order to reduce the total computational costs, we propose a new multi-step method.
From (25) and (29), we have
From (15) and (25), we have
Let
and
where
can be computed by (14), and
can be computed by (31).
From (33), we can get
where
,
and ∗ represents the Hadamard product.
Let be a real matrix, denotes the i-th column of the matrix A, and the dimension vector be called the column straightening of matrix A. The column straightening of the matrix has the following properties with the Hadamard product and Kronecker product of the matrix.
Lemma 3. (1) If , then ;
(2) If and , then .
From Lemma 3, matrix Equation (
34) can be transformed into the following
order linear systems
Because both and are known, the matrix can be obtained by solving the linear systems (35), and then solving the linear systems (31) to get . Therefore, the calculation process of solving the partial eigenvalue assignment for multi-input second-order linear systems with time delay can be summarized as the following Algorithm 2.
| Algorithm 2 An algorithm for Problem MGPEAP-TD by multi-input control. |
Input:
The real matrices with M symmetric positive definite, G skew-symmetric and K symmetric nonsingular;
The full column rank control matrix and the time delay ;
The self-conjugate subset of the open-loop spectrum and a self-conjugate set . Assume that are all distinct.
Output:
Find the state feedback matrices such that the closed-loop pencil .
- 1:
Form ; - 2:
Compute ; - 3:
Chose and form such that is nonsingular; - 4:
The vectors are calculated by Algorithm 1; - 5:
fordo - 6:
Compute ; - 7:
Compute by solving the linear systems (35); - 8:
Compute by solving the linear systems (31); - 9:
Compute ; - 10:
end for - 11:
.
|
Note that is always small, it is easy to solve the linear systems (35). The analysis of the computational costs of Algorithm 2 can be listed as follows. In our paper, we need to solve which requires flops and which requires flops. The total computational costs are . We already know that the total computational costs of traditional multi-step method are . In general, , so the total computational costs of our new multi-step method are much lower than that of the traditional multi-step method.


{kind=link}