Numerical Estimation of Switched Reluctance Motor Excitation Parameters Based on a Simplified Structure Average Torque Control Strategy for Electric Vehicles

 , , ,
, , ,  and
and
Abstract
:1. Introduction
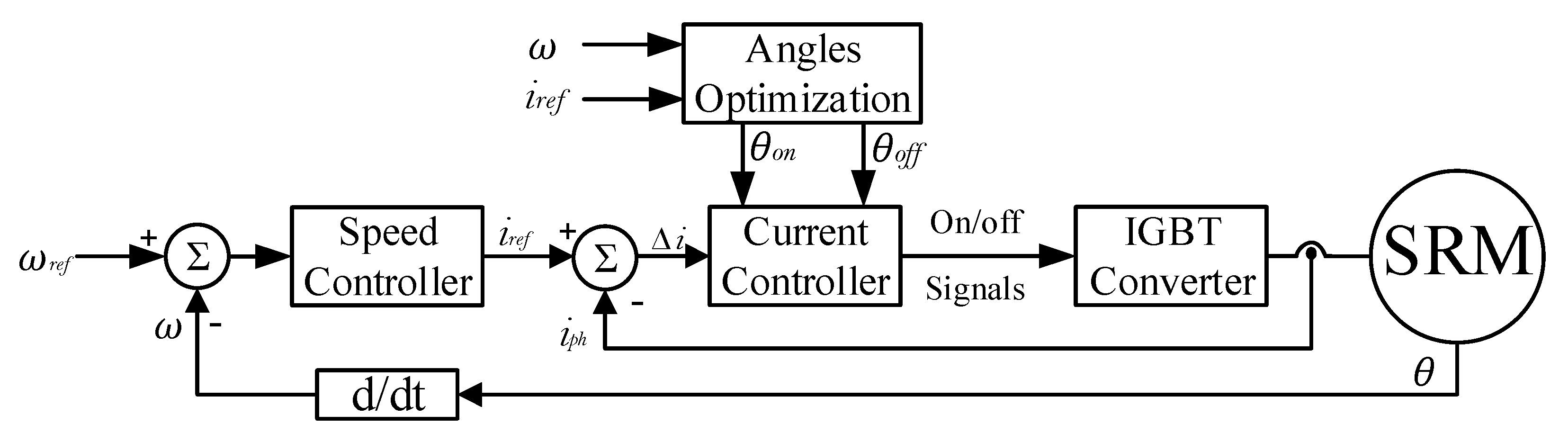
2. The Proposed Simple ATC Strategy
3. Methodology
3.1. The Optimization Problem
3.2. Solution Method
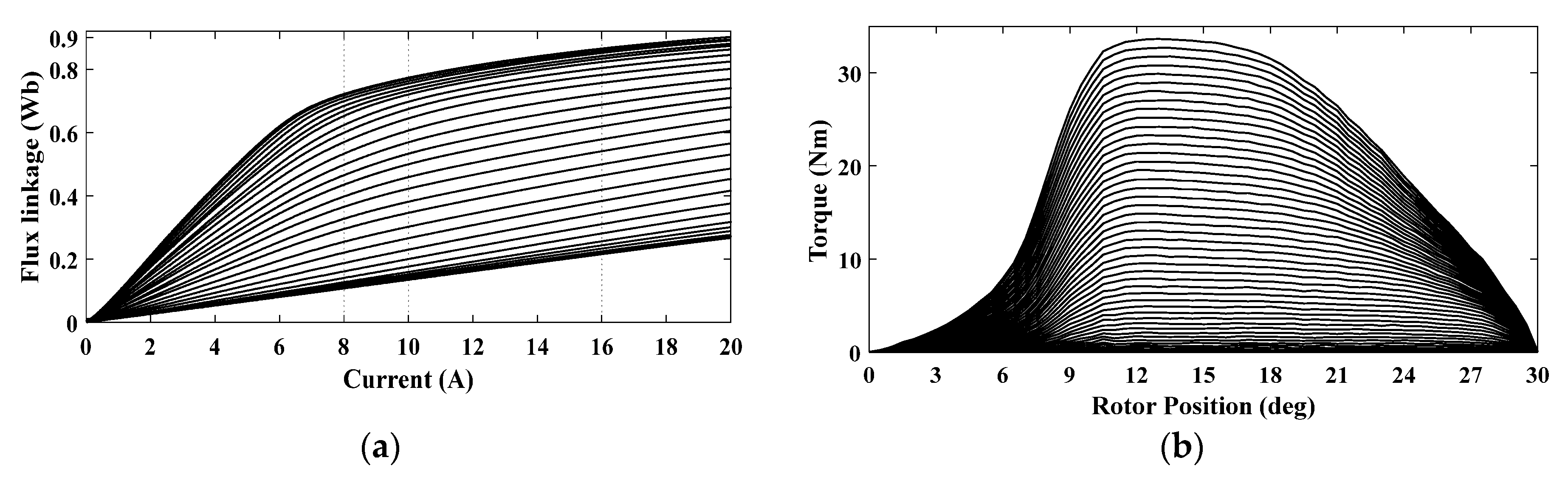
3.2.1. Machine Modeling
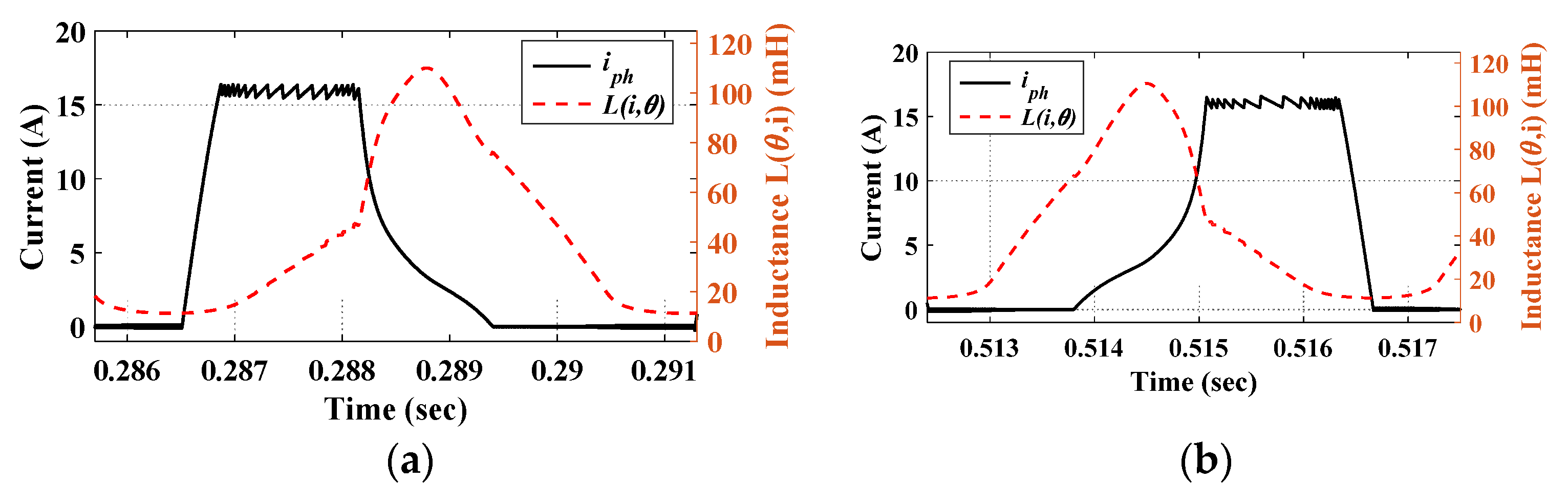
3.2.2. The Limits of Switching Angles (θon, θoff)
- (1)
- Fitting of phase inductance L(i, θ) against the rotor position (θ) in the minimum inductance zone. In this zone, the inductance is only a function of θ. Hence, a simple exponential function is enough for the fitting . The coefficients a, b, and c are the fitting coefficients,
- (2)
- Calculation of parameter (kb) as the derivative of inductance ,
- (3)
- Determination of the initial turn-on angle ,
- (4)
- Estimation of the effective values Leff(i, θ) and kb-eff(i, θ) as the average values of L(i, θ) and kb, respectively, over the interval [θon-initial, θm],
- (5)
- Using Equation (14) to determine the best analytical solution for the turn-on angle.
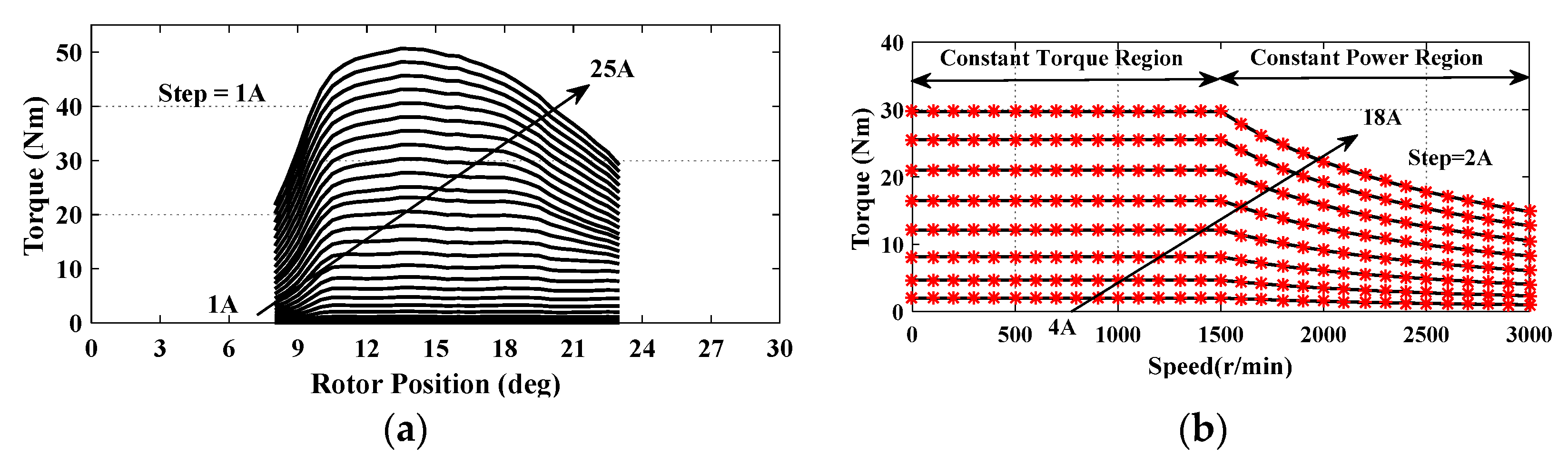
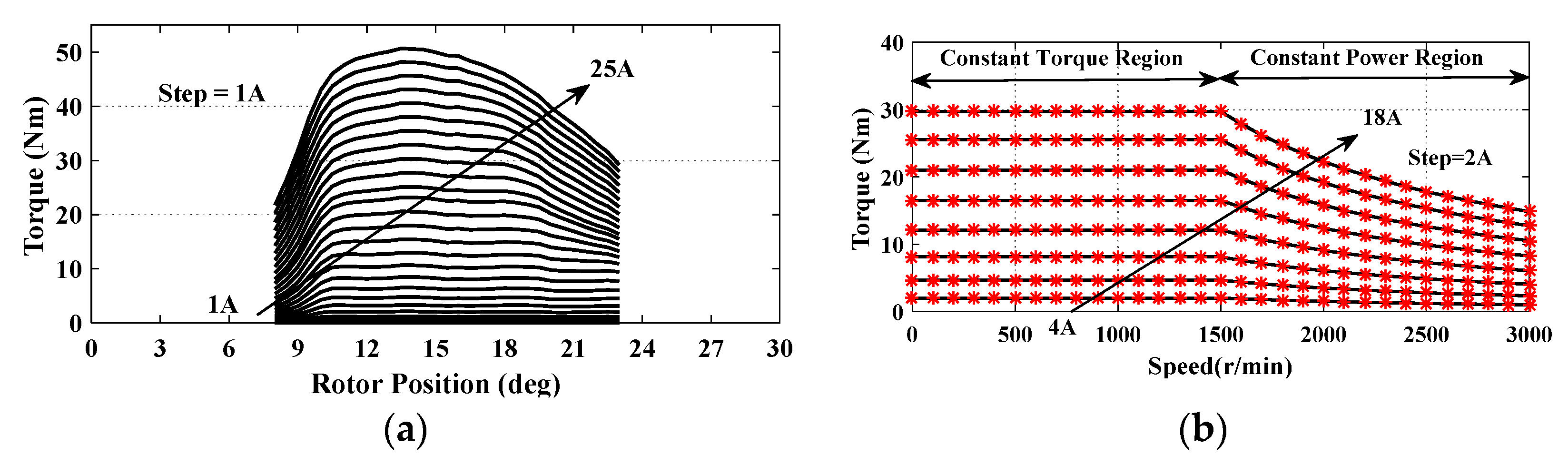
3.2.3. Estimation of the Rated Torque for a Given Current Level
3.2.4. Estimation of Base Values
3.2.5. Estimation of Weight Factors
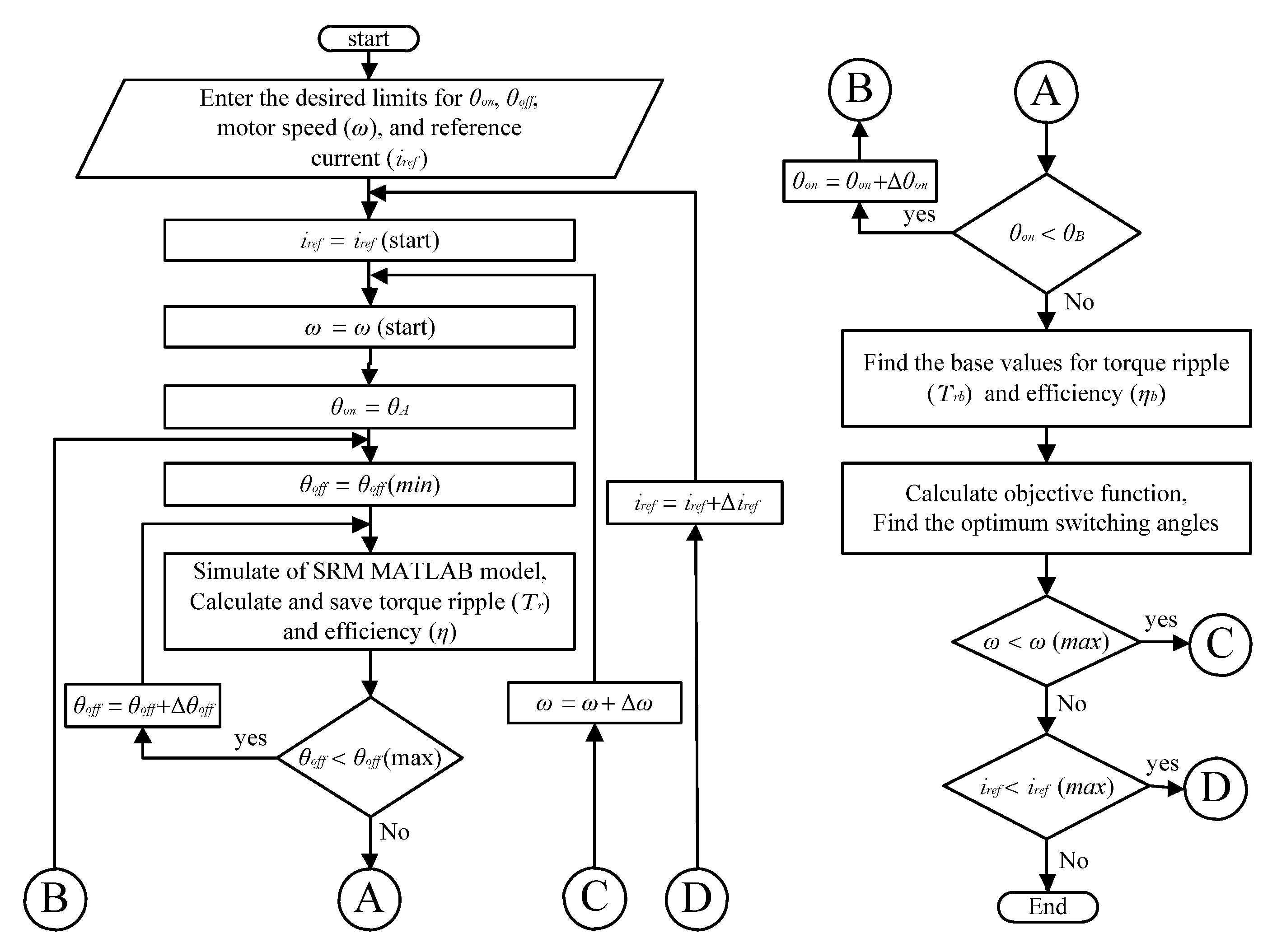
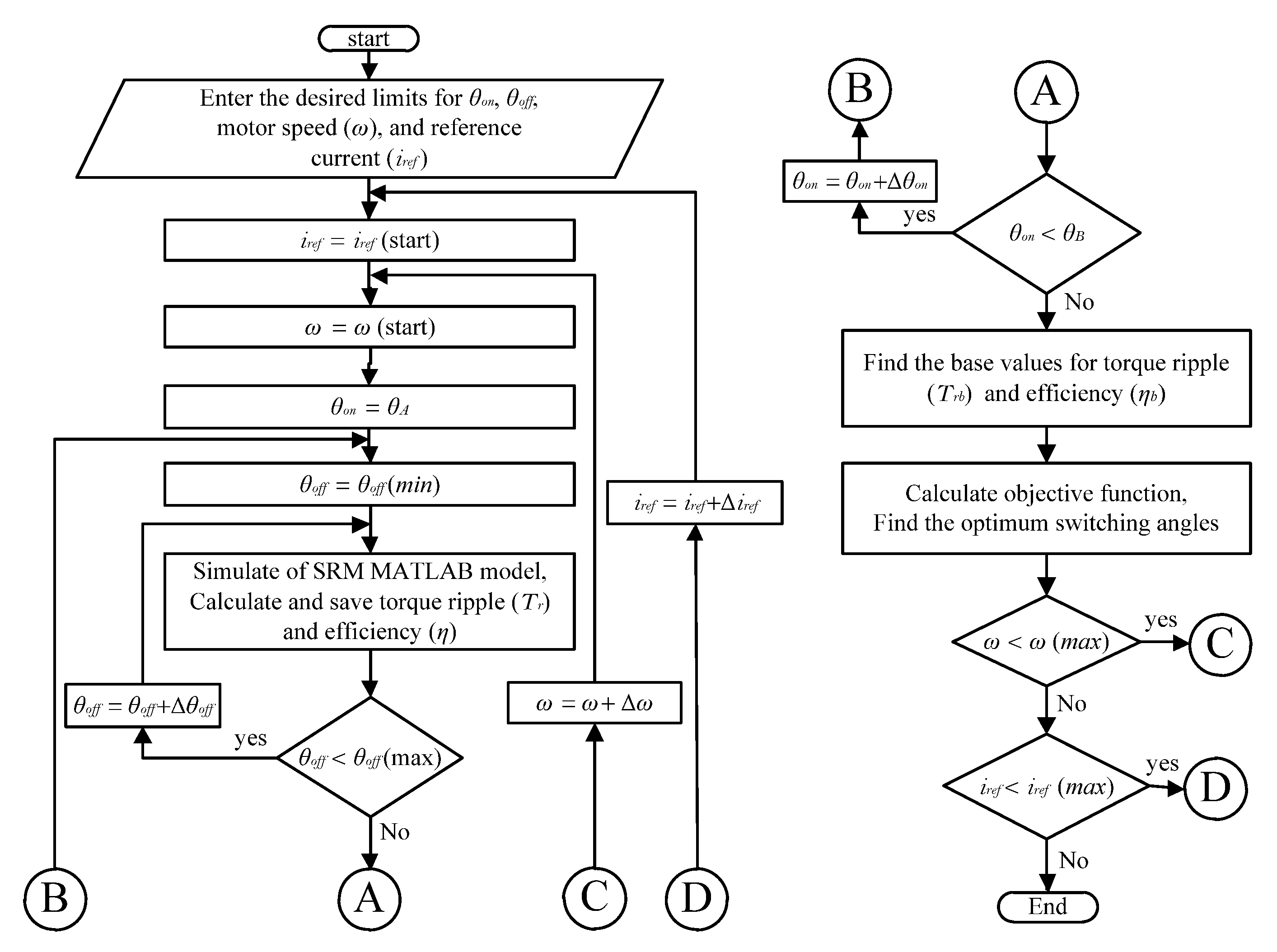
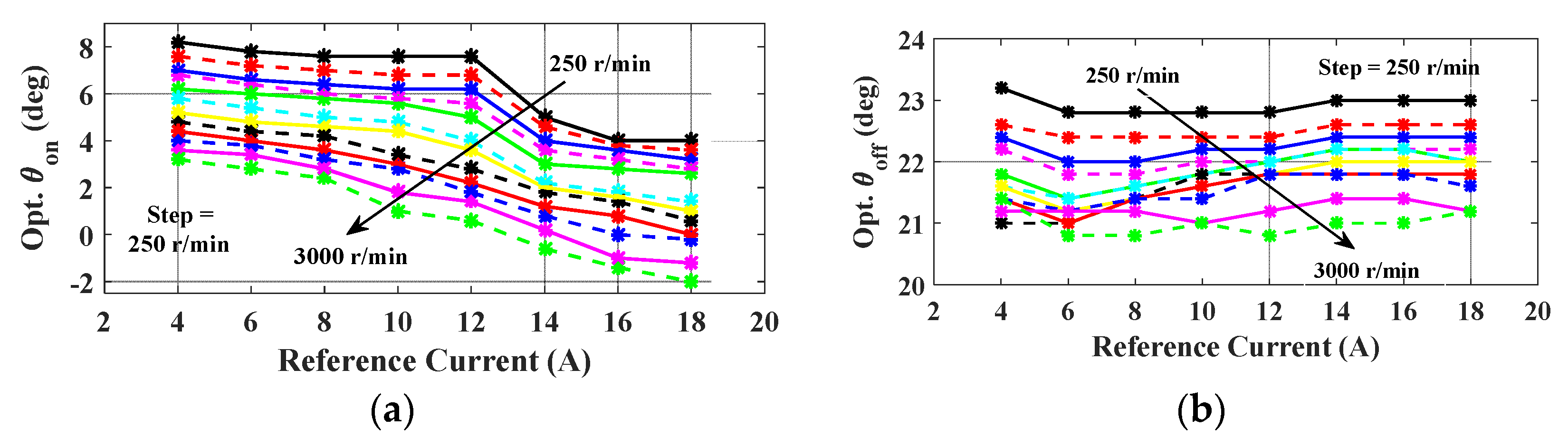
3.2.6. The Optimum Solution for Switching Angles
- (1)
- Define the operating point by the desired speed (ω) and reference current (iref),
- (2)
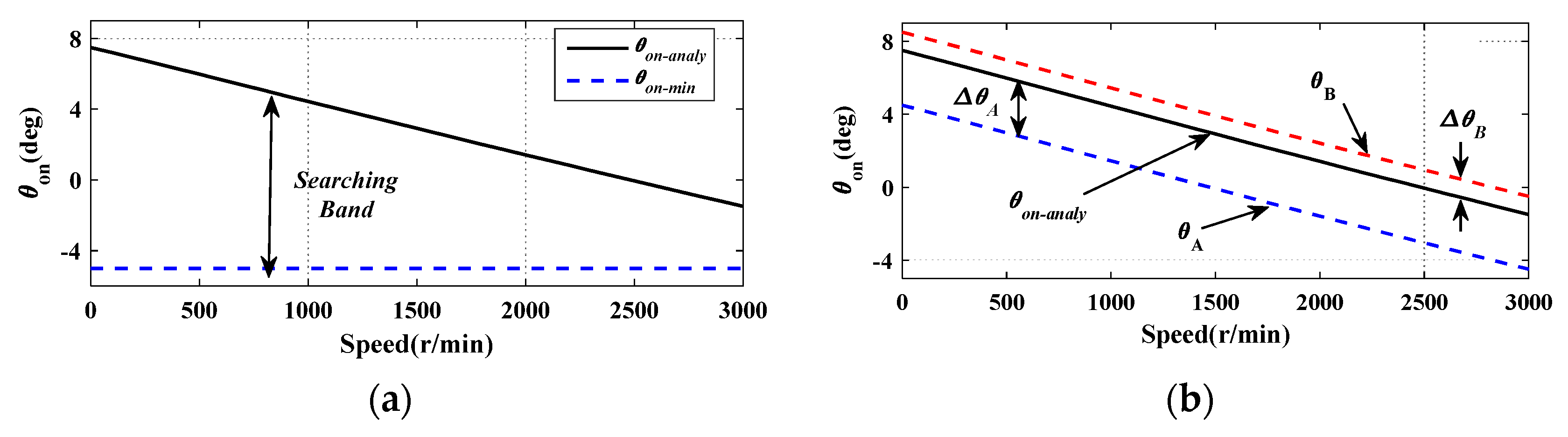
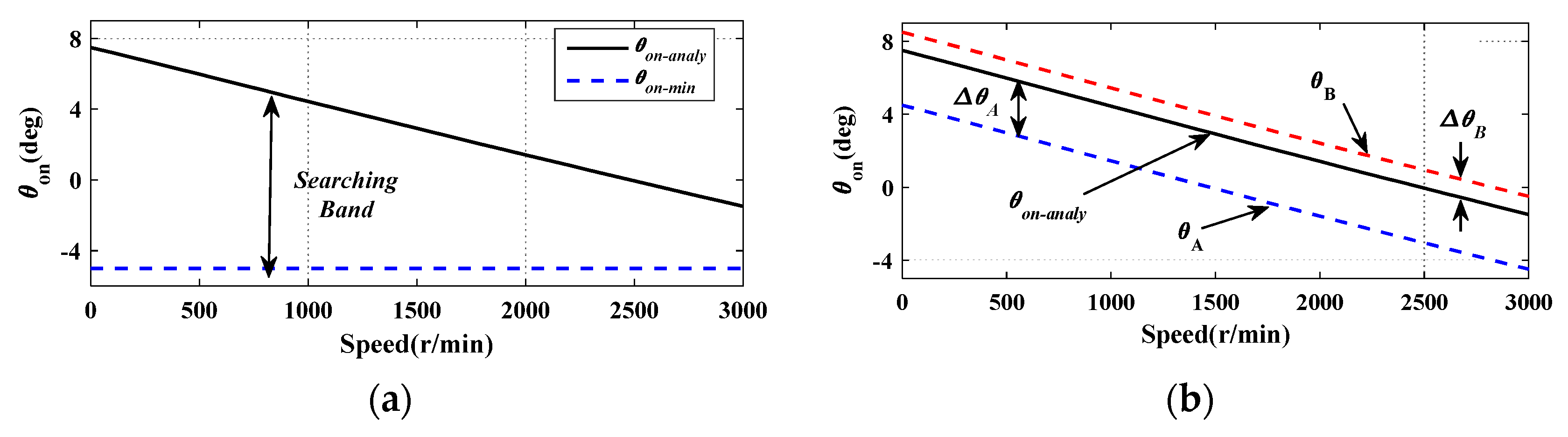
- Use Equation (14) to determine the best analytical turn-on angle (θon-analy),
- (3)
- Choose the margins ΔθA and ΔθB. Then, define the minimum and maximum limits (θA and θB) for the turn-on angle (θon),
- (4)
- Define the minimum and maximum limits ( and ) for the turn-off angle. For the tested 8/6 SRM, = θon + 15°, and = 25°,
- (5)
- Set θon = θA (the starting point) and θoff = (the starting point),
- (6)
- Run the simulation model of SRM, estimate the required indices (torque ripples and efficiency), and save the data,
- (7)
- Increase θoff by the desired resolution (Δθoff). Hence, θoff = θoff + Δθoff. Δθoff is set to 0.2°,
- (8)
- Repeat step 6 till θoff = ,
- (9)
- Increase θon by the desired resolution (Δθon). Hence, θon = θon + Δθon. Δθon is set to 0.2°,
- (10)
- Repeat steps 7 to 9 till θon = θB,
- (11)
- Estimate the base values (Trb and ηb) from the saved data using Equations (17) and (18),
- (12)
- Choose the weight factors (wr and wη) according to the desired optimization level,
- (13)
- Calculate the objective function (Fobj) using Equation (1),
- (14)
- Define the optimum switching angles that correspond to the minimum objective function.
4. Simulation Results and Discussion
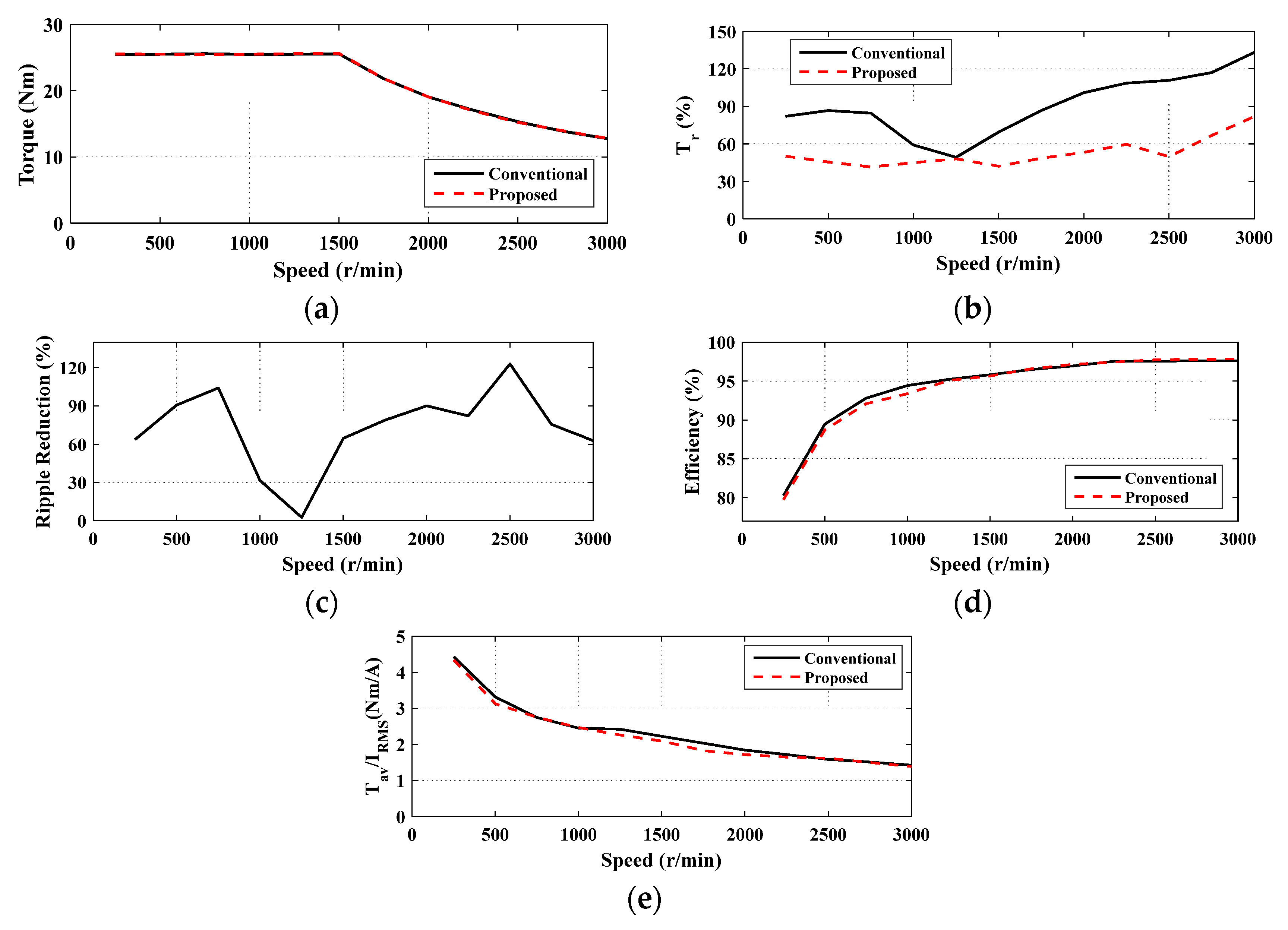
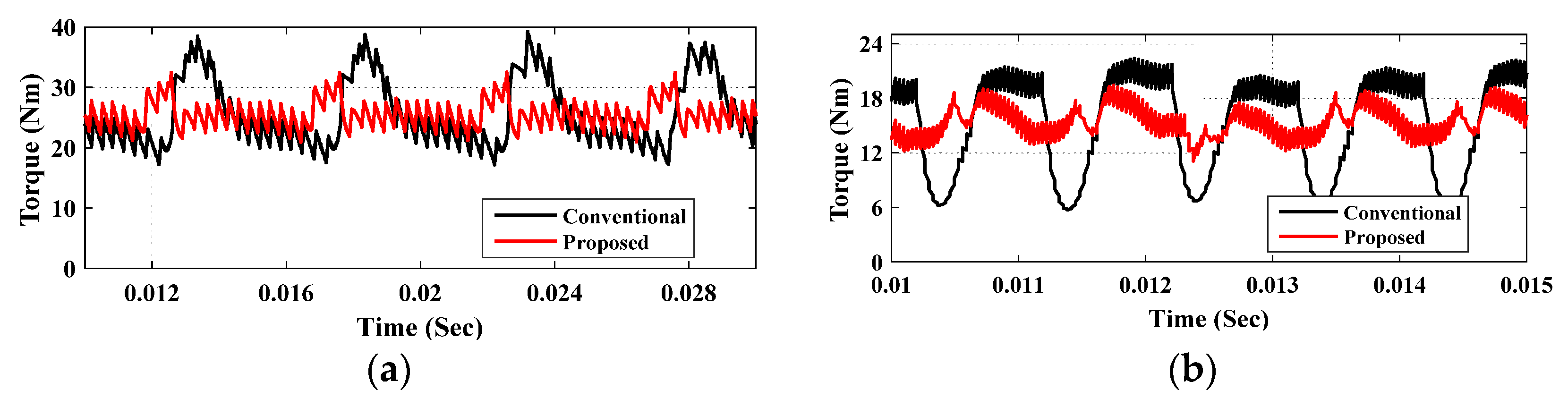
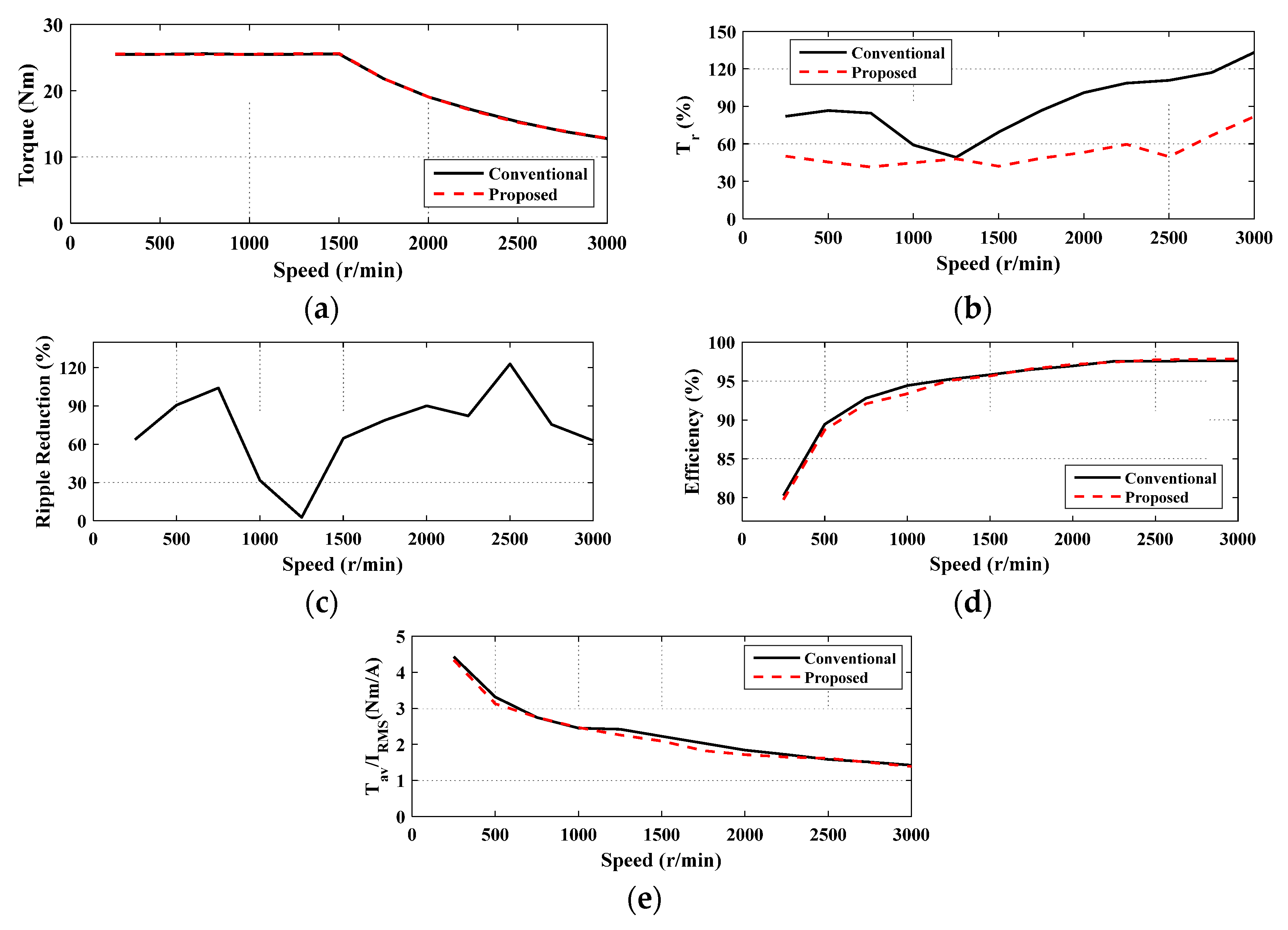
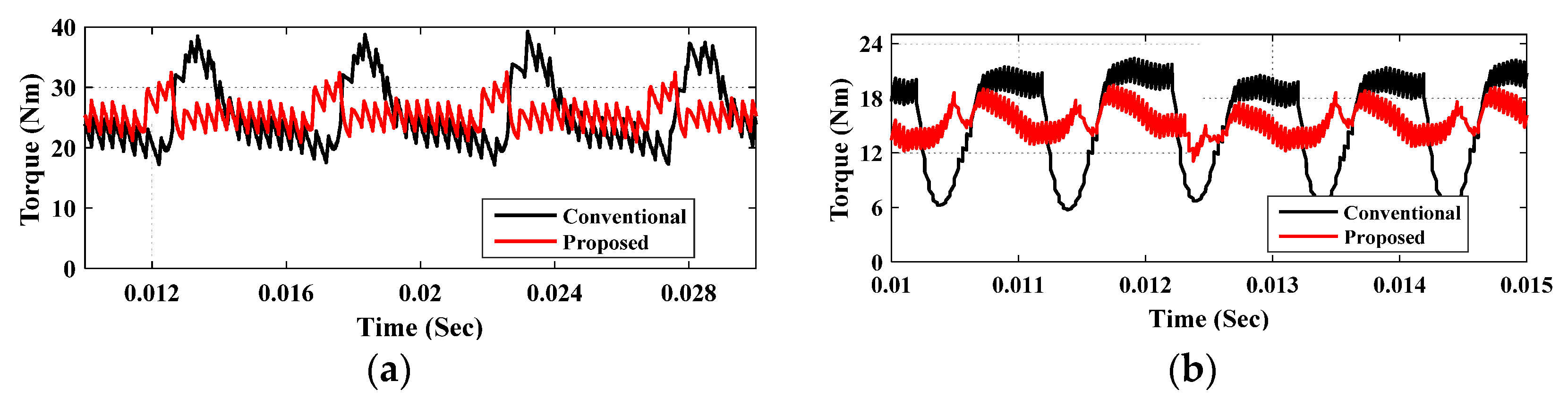
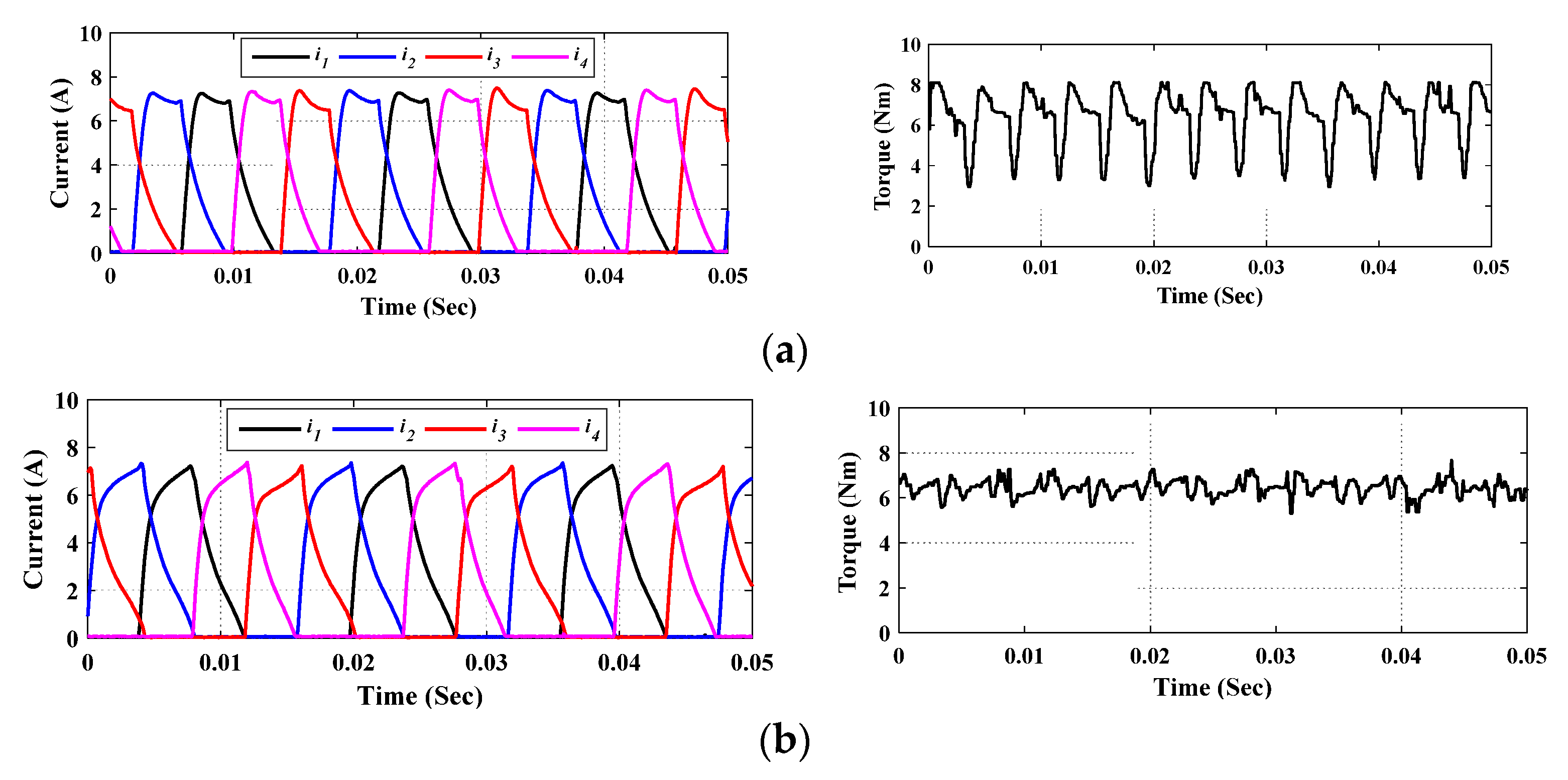
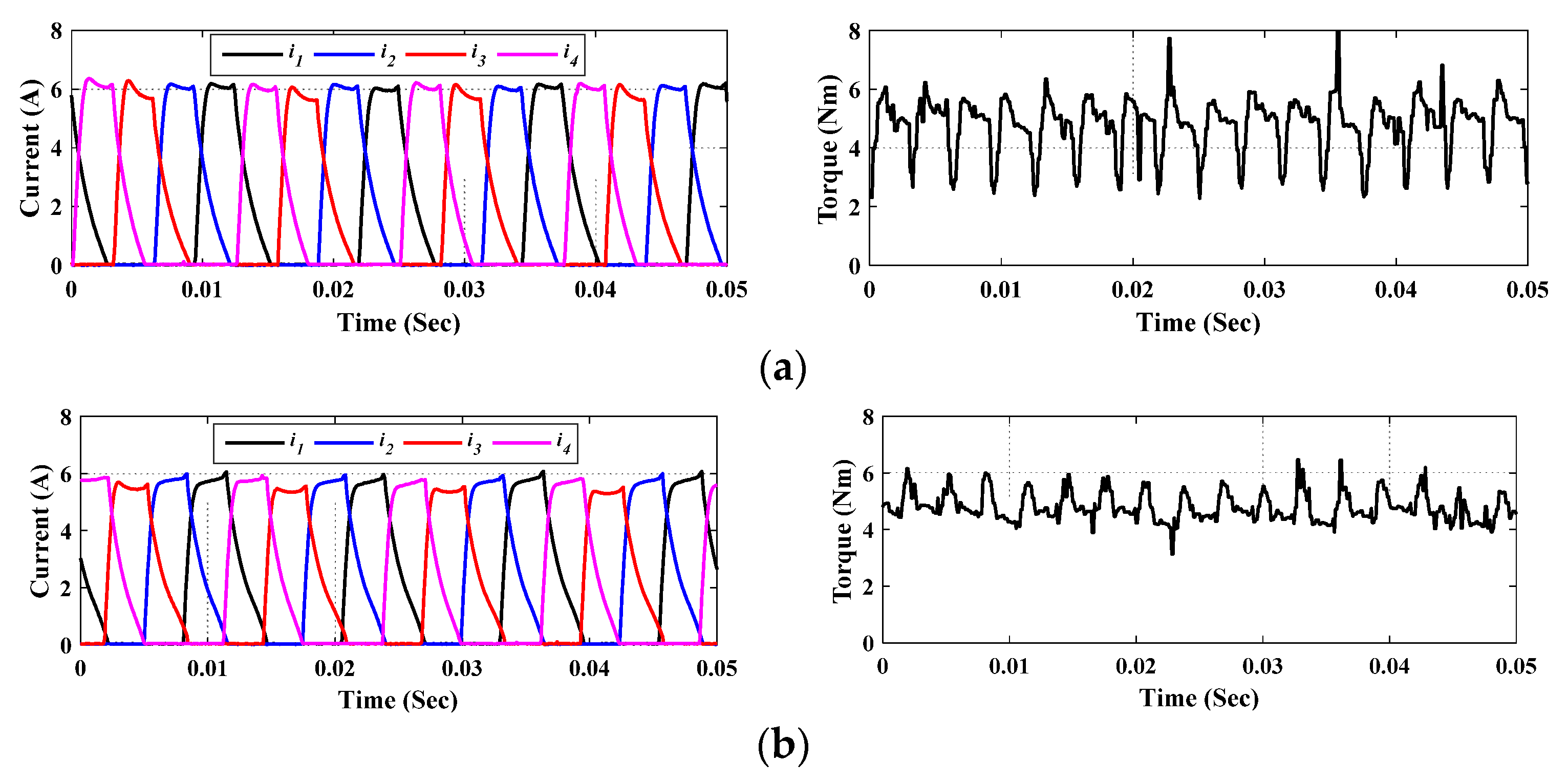
4.1. The Steady-State Performance
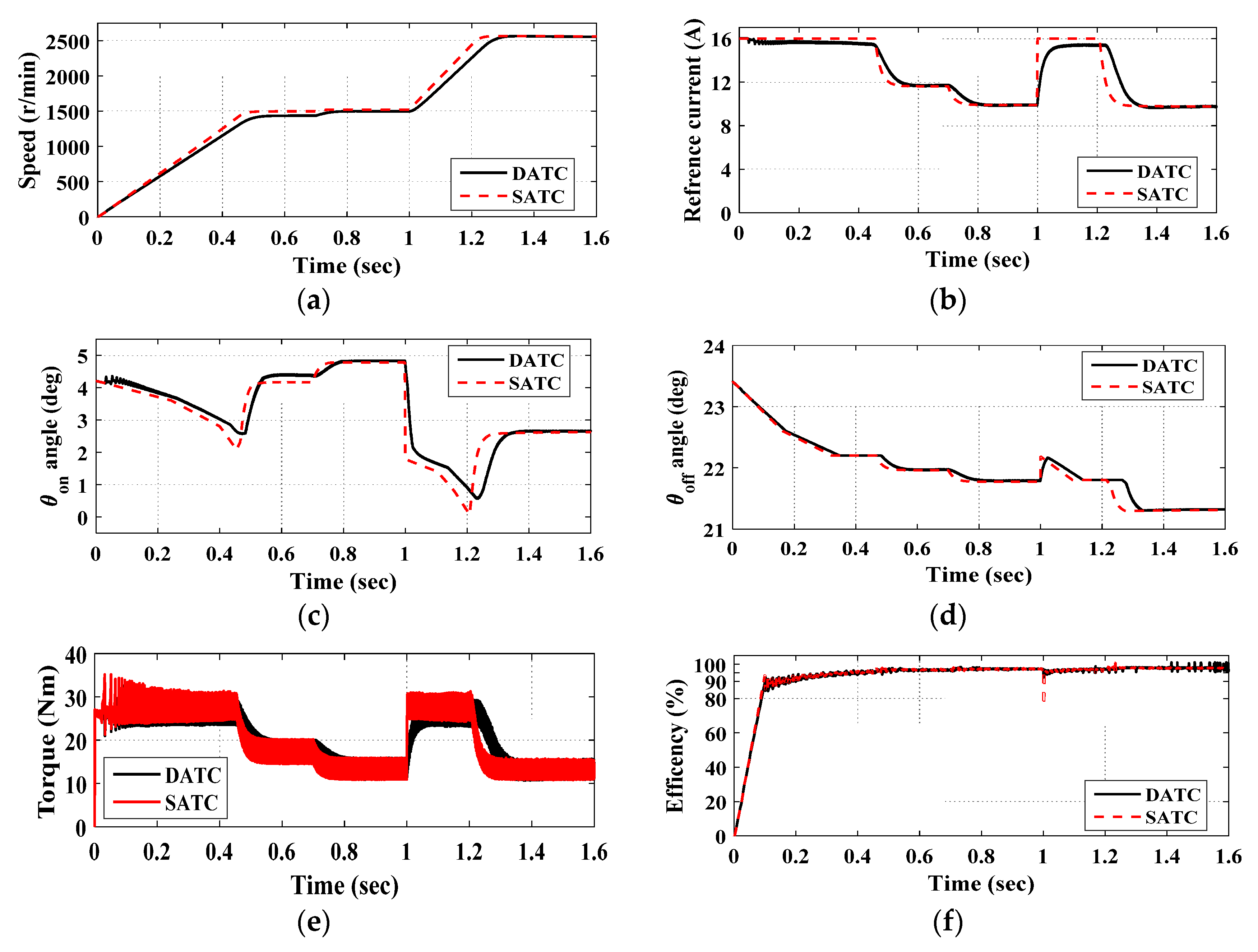
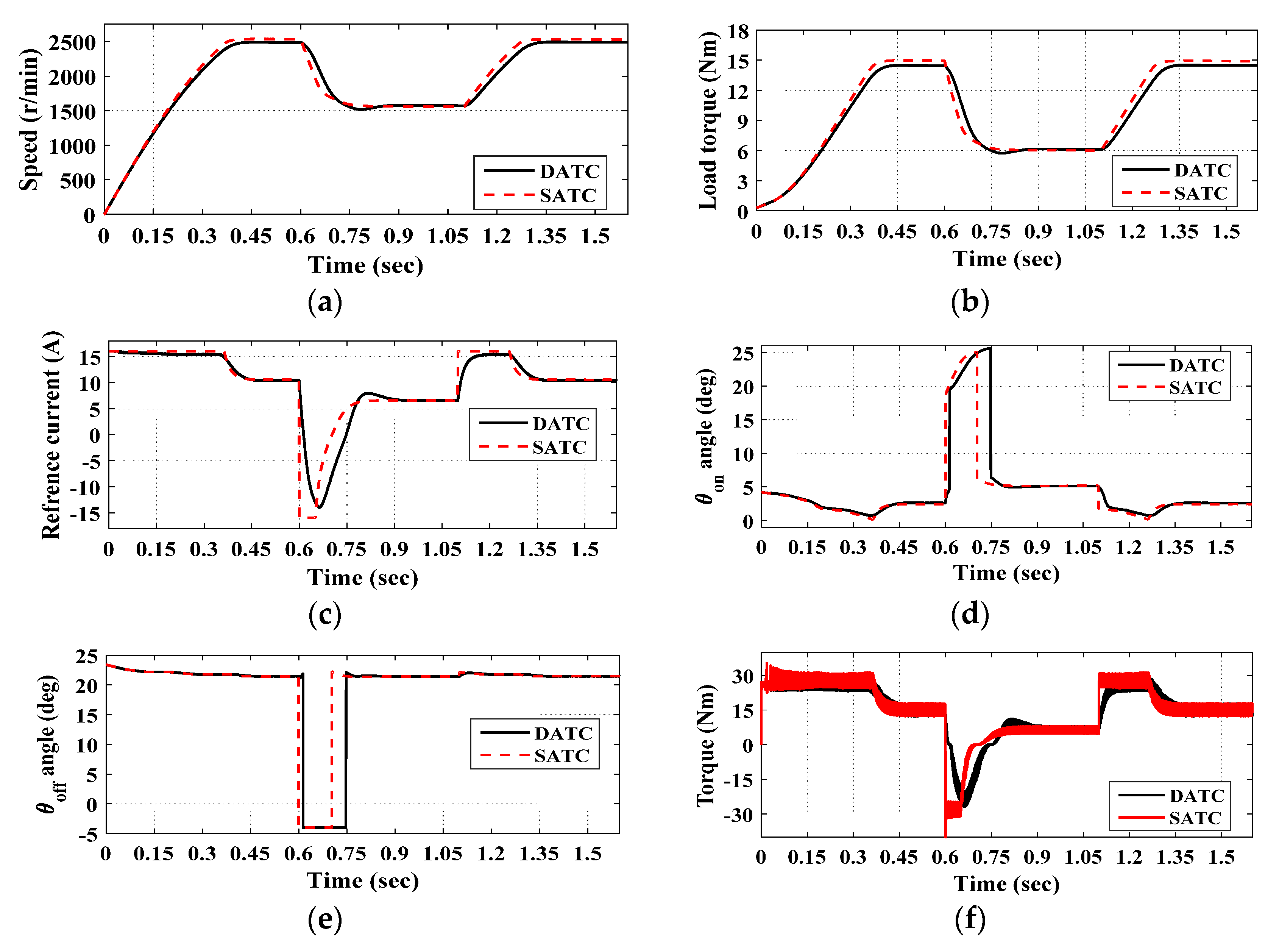
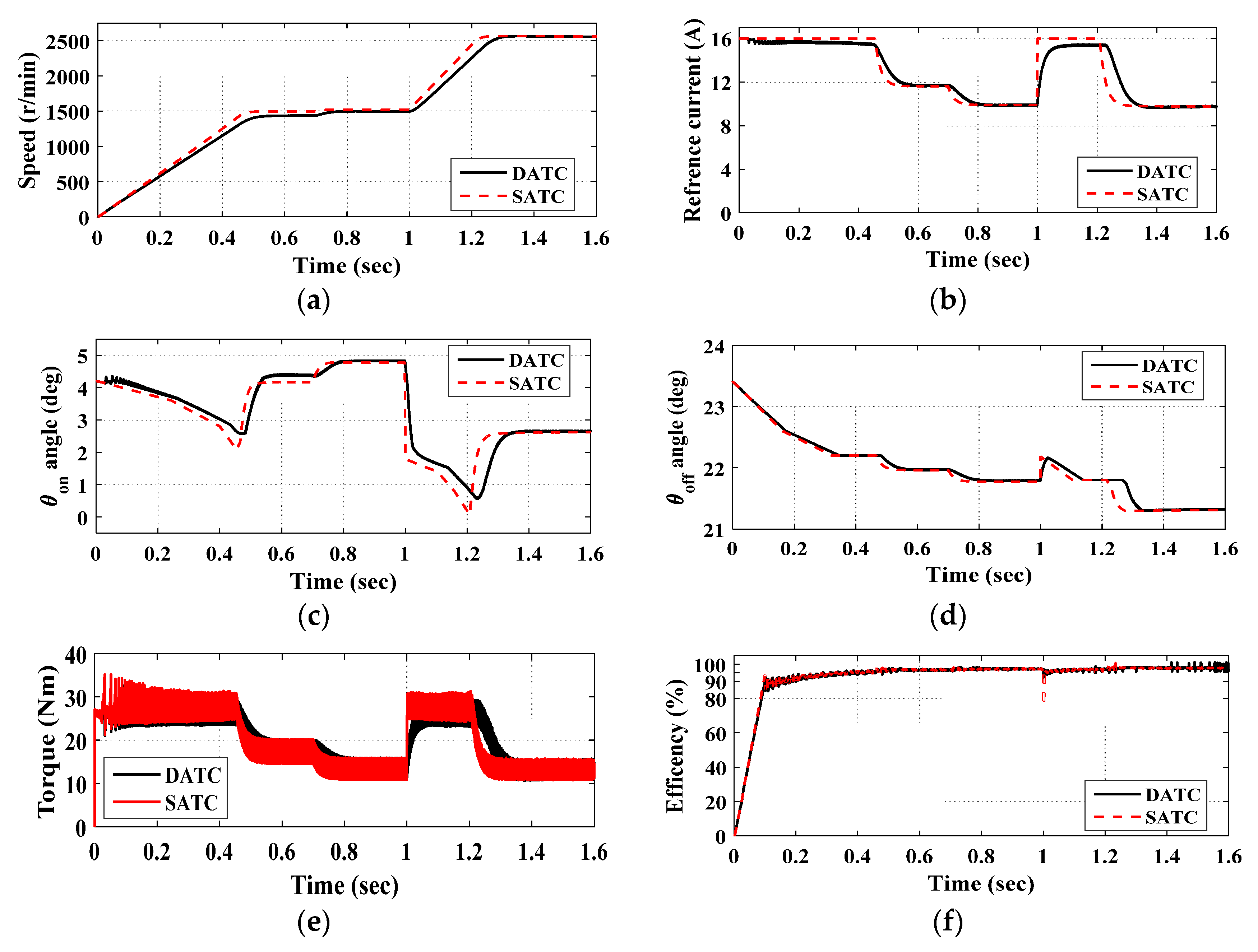
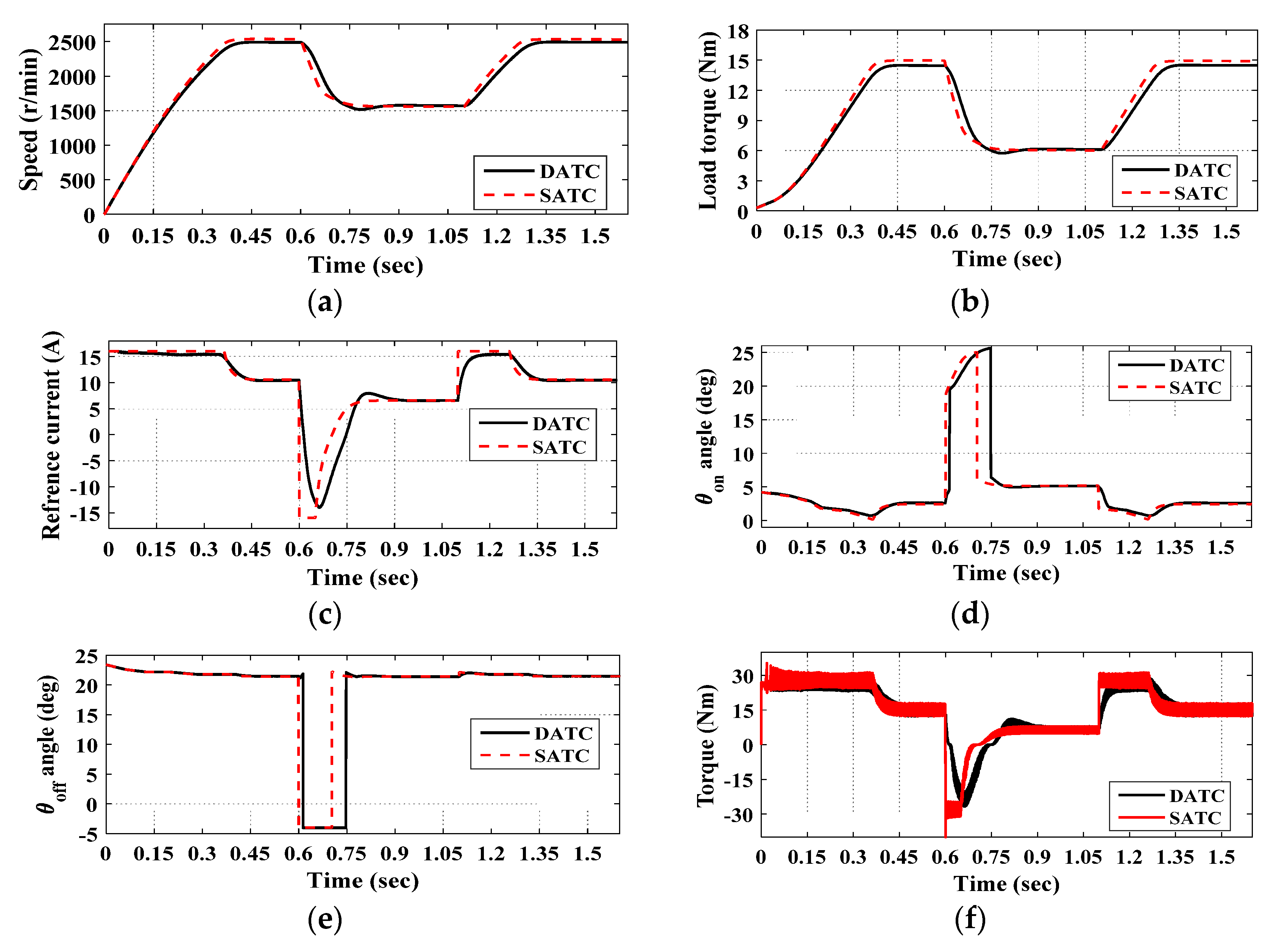
4.2. The Dynamic Performance
4.2.1. Sudden Change in Reference Speed and Load Torque
4.2.2. Acceleration and Deceleration with Electric Vehicle Loading
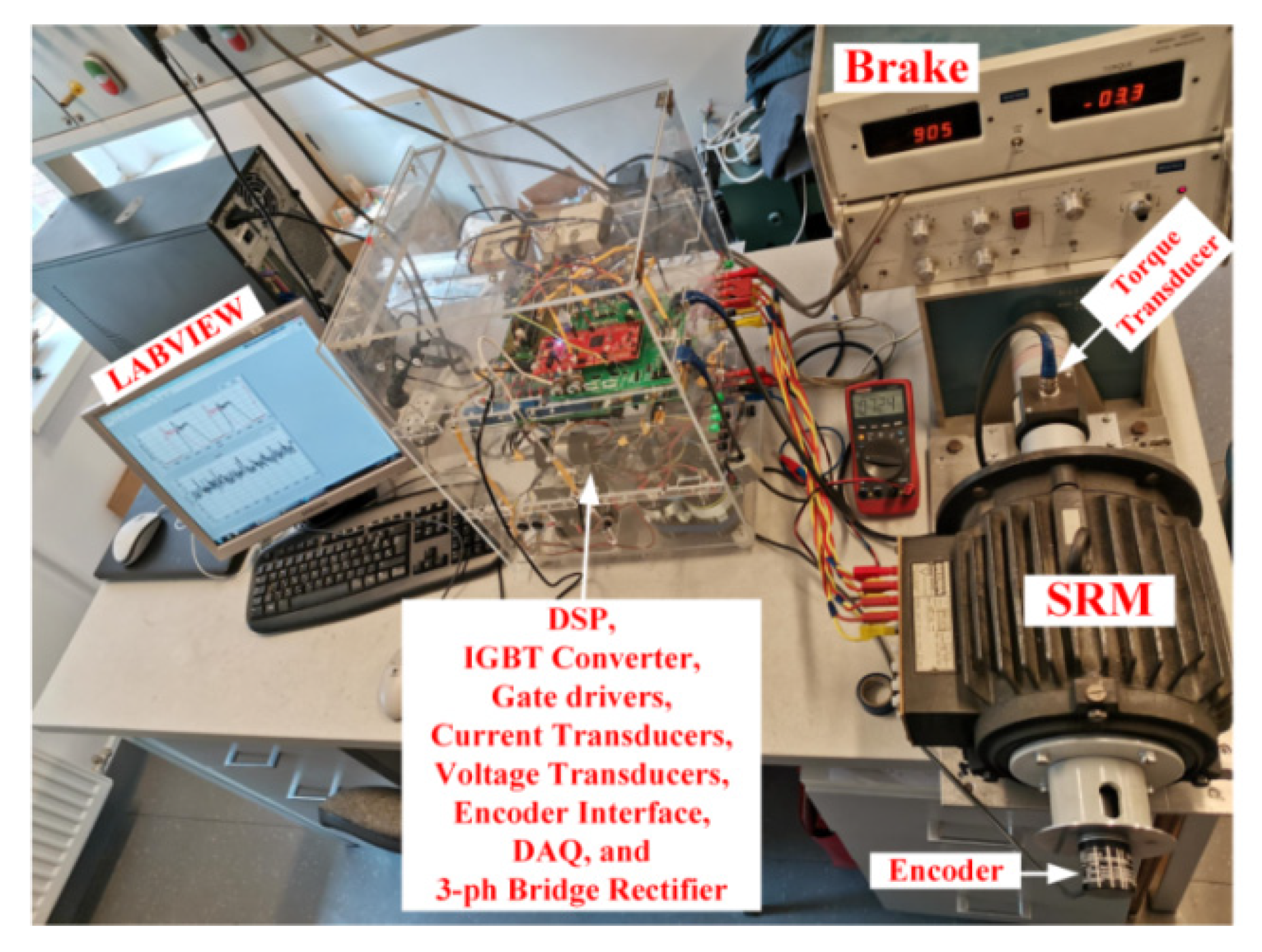
5. Experimental Verification
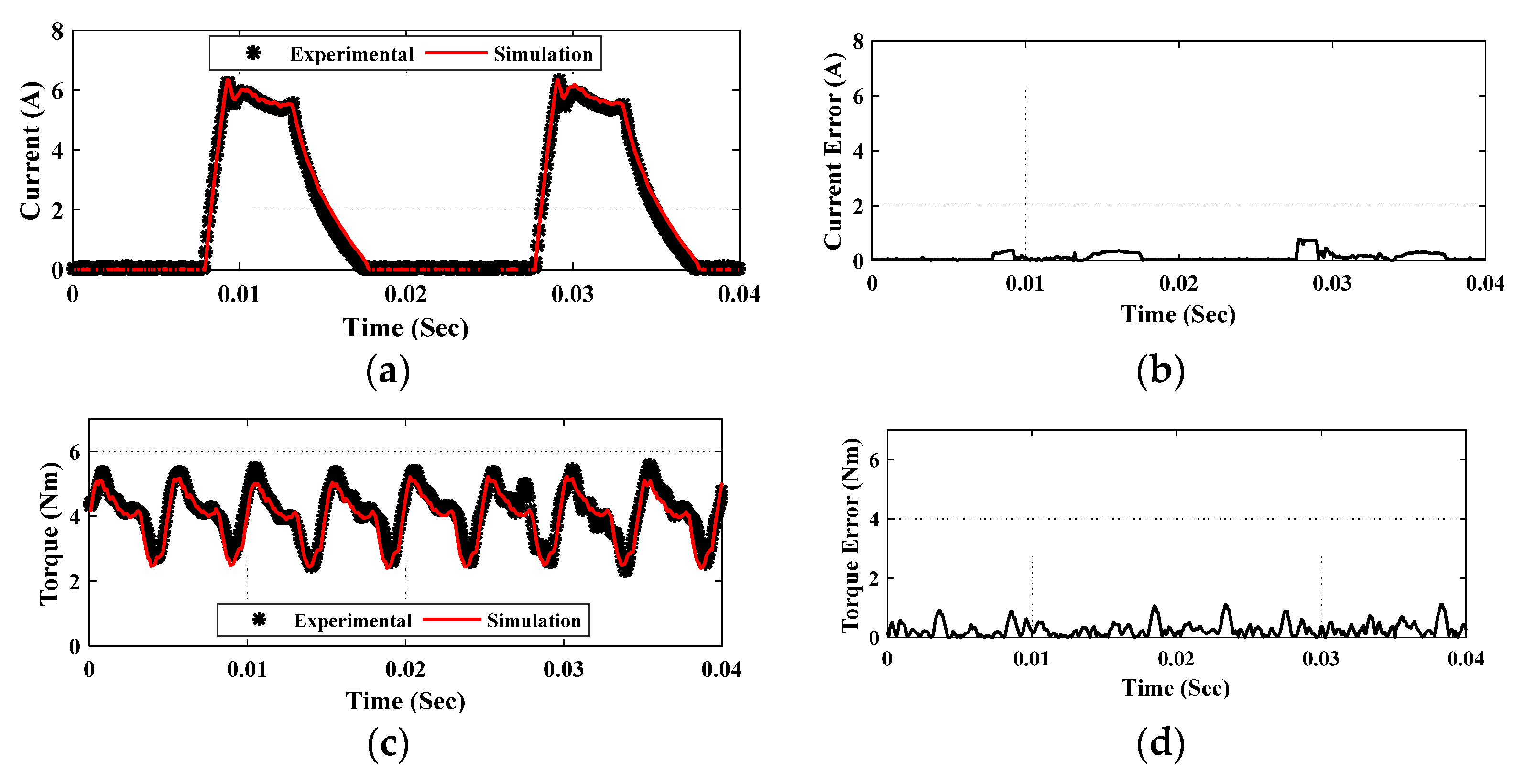
5.1. Model Verification
5.2. Quantitative Analysis
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Nomenclature
| Symbol | Definition | Unit |
| B | The combined rotor and load viscous friction coefficient | Kg.m2/s |
| Fobj | The objective function | |
| Iav | The average supply current | A |
| ik | The phase current of kth phase | A |
| iref | The reference current | A |
| is | The instantaneous supply current | A |
| J | The combined rotor and load inertia coefficient | Kg.m2 |
| Lk | The phase inductance of kth phase | H |
| Lu | The unaligned/minimum inductance | H |
| n | The number of sampling point under calculation | |
| q | The number of motor phases | |
| R | The phase resistance | Ω |
| Tav | The average torque | N.m |
| Te | The total electromagnetic torque | N.m |
| Tk | The phase torque of kth phase | N.m |
| TL | The load torque | N.m |
| Tmax | The maximum value of instantaneous motor torque | N.m |
| Tmin | The minimum value of instantaneous motor torque | N.m |
| Tr | The torque ripple | N.m |
| Trated | The rated motor torque for a given value of reference current and speed | N.m |
| Trb | The base value of torque ripple | N.m |
| Tref | The reference torque | N.m |
| Ts | The sampling period | s |
| VDC | The DC supply voltage | V |
| vk | The phase voltage of kth phase | V |
| wr | The weight factor of torque ripple | |
| wη | The weight factor of efficiency | |
| θ | The rotor position | Deg. |
| θA | The minimum limit of the turn-on angle | Deg. |
| θB | The maximum limit of the turn-on angle | Deg. |
| θm | The angle where rotor poles start to overlap with stator poles | Deg. |
| θon | The turn-on angle | Deg. |
| The analytically obtained turn-on angle | Deg. | |
| θoff | The turn-off angle | Deg. |
| The minimum limit of the turn-off angle | Deg. | |
| The maximum limit of the turn-off angle | Deg. | |
| λk | The phase flux linkage of kth phase | Wb |
| λ(0) | The initial flux-linkage | Wb |
| η | The efficiency | |
| ηb | The base value of efficiency | |
| ω | The angular velocity of rotor | Rad/s |
| τ | The time of one electric cycle | s |
| ΔθA | The lower margin of the turn-on angle | Deg. |
| ΔθB | The higher margin of the turn-on angle | Deg. |
References
- Bramerdorfer, G.; Tapia, J.A.; Pyrhonen, J.J.; Cavagnino, A. Modern Electrical Machine Design Optimization: Techniques, Trends, and Best Practices. IEEE Trans. Ind. Electron. 2018, 65, 7672–7684. [Google Scholar] [CrossRef]
- Chen, H.; Yan, W.; Gu, J.; Sun, M. Multiobjective Optimization Design of a Switched Reluctance Motor for Low-Speed Electric Vehicles with a Taguchi–CSO Algorithm. IEEE/ASME Trans. Mechatron. 2018, 23, 1762–1774. [Google Scholar] [CrossRef]
- Bostanci, E.; Moallem, M.; Parsapour, A.; Fahimi, B. Opportunities and Challenges of Switched Reluctance Motor Drives for Electric Propulsion: A Comparative Study. IEEE Trans. Transp. Electrif. 2017, 3, 58–75. [Google Scholar] [CrossRef]
- Nguyen, D.-M.; Bahri, I.; Krebs, G.; Berthelot, E.; Marchand, C.; Ralev, I.; Burkhart, B.; De Doncker, R.W. Efficiency Improvement by the Intermittent Control for Switched Reluctance Machine in Automotive Application. IEEE Trans. Ind. Appl. 2019, 55, 4167–4182. [Google Scholar] [CrossRef]
- Husain, T.; Elrayyah, A.; Sozer, Y.; Husain, I. Unified Control for Switched Reluctance Motors for Wide Speed Operation. IEEE Trans. Ind. Electron. 2018, 66, 3401–3411. [Google Scholar] [CrossRef]
- Liu, L.; Zhao, M.; Yuan, X.; Ruan, Y. Direct instantaneous torque control system for switched reluctance motor in electric vehicles. J. Eng. 2019, 2019, 1847–1852. [Google Scholar] [CrossRef]
- Li, G.J.; Zhang, K.; Zhu, Z.Q.; Jewell, G.W. Comparative Studies of Torque Performance Improvement for Different Doubly Salient Synchronous Reluctance Machines by Current Harmonic Injection. IEEE Trans. Energy Convers. 2018, 34, 1094–1104. [Google Scholar] [CrossRef]
- Shang, C.; Xu, A.; Huang, L.; Chen, J. Flux linkage optimization for direct torque control of switched reluctance motor based on model predictive control. IEEJ Trans. Electr. Electron. Eng. 2019, 14, 1105–1113. [Google Scholar] [CrossRef]
- Xu, A.; Shang, C.; Chen, J.; Zhu, J.; Han, L. A New Control Method Based on DTC and MPC to Reduce Torque Ripple in SRM. IEEE Access 2019, 7, 68584–68593. [Google Scholar] [CrossRef]
- Cheng, H.; Chen, H.; Yang, Z. Average torque control of switched reluctance machine drives for electric vehicles. IET Electr. Power Appl. 2015, 9, 459–468. [Google Scholar] [CrossRef]
- Jamil, M.U.; Kongprawechnon, W.; Chayopitak, N. Average Torque Control of a Switched Reluctance Motor Drive for Light Electric Vehicle Applications. IFAC-PapersOnLine 2017, 50, 11535–11540. [Google Scholar] [CrossRef]
- Hamouda, M.; Szamel, L. Torque Control of Switched Reluctance Motor Drives for Electric Vehicles. In Proceedings of the Automation and Applied Computer Science Workshop, Budapest, Hungary, 16 June 2017; pp. 9–20. [Google Scholar]
- Hamouda, M.; Szamel, L. Reduced Torque Ripple based on a Simplified Structure Average Torque Control of Switched Reluctance Motor for Electric Vehicles. In Proceedings of the 2018 International IEEE Conference and Workshop in Óbuda on Electrical and Power Engineering (CANDO-EPE); Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2018; pp. 000109–000114. [Google Scholar]
- Petruș, V. Switched Reluctance Motors for Electric Vehicle Propulsion-Comparative Numerical and Experimental Study of Control Scheme; Universite Libre de Bruxelles: Bruxelles, Belgium, 2012; p. 457. [Google Scholar]
- Blanqué, B.; Perat, J.; Andrada, P.; Torrent, M. Improving efficiency in switched reluctance motor drives with online control of turn-on and turn-off angles. In Proceedings of the 2005 European Conference on Power Electronics and Applications; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2005; p. 9. [Google Scholar]
- Argeseanu, A.; Ritchie, E.; Leban, K. Torque optimization algorithm for SRM drives using a robust predictive strategy. In Proceedings of the 2010 12th International Conference on Optimization of Electrical and Electronic Equipment; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2010; pp. 252–257. [Google Scholar]
- Rodrigues, M.; Branco, P.J.C.; Suemitsu, W. Fuzzy logic torque ripple reduction by turn-off angle compensation for switched reluctance motors. IEEE Trans. Ind. Electron. 2001, 48, 711–715. [Google Scholar] [CrossRef]
- Xu, Y.; Zhong, R.; Chen, L.; Lu, S. Analytical method to optimise turn-on angle and turn-off angle for switched reluctance motor drives. IET Electr. Power Appl. 2012, 6, 593. [Google Scholar] [CrossRef]
- Bose, B.K.; Miller, T.J.E.; Szczesny, P.M.; Bicknell, W.H. Microcomputer Control of Switched Reluctance Motor. IEEE Trans. Ind. Appl. 1986, 22, 708–715. [Google Scholar] [CrossRef]
- Pittermann, M.; Fort, J.; Diesl, J.; Pavlicek, V. Optimal SRM-Control Algorithm to Achieve Maximum Torque and Real Converter Limits. In Proceedings of the 18th International Conference on Mechatronics—Mechatronika (ME), Brno, Czech Republic, 5–7 December 2018; Available online: https://ieeexplore.ieee.org/document/8624667 (accessed on 22 July 2020).
- Shahabi, A.; Rashidi, A.; Afshoon, M.; Nejad, S.M.S. Commutation angles adjustment in SRM drives to reduce torque ripple below the motor base speed. Turk. J. Electr. Eng. Comput. Sci. 2016, 24, 669–682. [Google Scholar] [CrossRef]
- Xue, X.; Cheng, K.; Lin, J.; Zhang, Z.; Luk, K.; Ng, T.; Cheung, N.C.; Cheng, K.-W.E. Optimal Control Method of Motoring Operation for SRM Drives in Electric Vehicles. IEEE Trans. Veh. Technol. 2010, 59, 1191–1204. [Google Scholar] [CrossRef]
- Omekanda, A. A new technique for multidimensional performance optimization of switched reluctance motors for vehicle propulsion. IEEE Trans. Ind. Appl. 2003, 39, 672–676. [Google Scholar] [CrossRef]
- Nasirian, V.; Kaboli, S.; Davoudi, A.; Moayedi, S. High-Fidelity Magnetic Characterization and Analytical Model Development for Switched Reluctance Machines. IEEE Trans. Magn. 2013, 49, 1505–1515. [Google Scholar] [CrossRef]
- Hamouda, M.; Számel, L. Accurate Magnetic Characterization Based Model Development for Switched Reluctance Machine. Period. Polytech. Electr. Eng. Comput. Sci. 2019, 63, 202–212. [Google Scholar] [CrossRef]
- Song, S.; Ge, L.; Ma, S.; Zhang, M.; Wang, L. Accurate Measurement and Detailed Evaluation of Static Electromagnetic Characteristics of Switched Reluctance Machines. IEEE Trans. Instrum. Meas. 2015, 64, 704–714. [Google Scholar] [CrossRef]
- Anvari, B.; Toliyat, H.A.; Fahimi, B. Simultaneous Optimization of Geometry and Firing Angles for In-Wheel Switched Reluctance Motor Drive. IEEE Trans. Transp. Electrif. 2018, 4, 322–329. [Google Scholar] [CrossRef]
- Sozer, Y.; Torrey, D.; Mese, E. Automatic control of excitation parameters for switched-reluctance motor drives. IEEE Trans. Power Electron. 2003, 18, 594–603. [Google Scholar] [CrossRef]
- Hamouda, M.; Számel, L. A new technique for optimum excitation of switched reluctance motor drives over a wide speed range. Turk. J. Electr. Eng. Comput. Sci. 2018, 26, 2753–2767. [Google Scholar] [CrossRef]
- Optimum Control Parameters of Switched Reluctance Motor for Torque Production Improvement over the Entire Speed Range. Acta Polytech. Hung. 2019, 16. [CrossRef]
- Vlad, P.; Adrian-Cornel, P.; Johan, G.; Claudia, M.; Vasile, I. Average Torque Control of an 8/6 Switched Reluctance Machine for Electric Vehicle Traction. J. Comput. Sci. Control Syst. 2012, 5, 59. Available online: http://connection.ebscohost.com/c/articles/93664062/average-torque-control-8-6-switched-reluctance-machine-electric-vehicle-traction (accessed on 13 January 2020).







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Geometry Parameter | Value |
|---|---|
| Output power (kW) | 4.0 |
| Rated voltage (v) | 600 |
| Rated speed (r/min) | 1500 |
| Phase resistance (Ω) | 0.642 |
| Air-gap length | 0.4 |
| Height of rotor/stator pole | 18.1/29.3 |
| Stator outside diameter | 179.5 |
| Shaft/Bore diameters | 36/96.7 |
| Rotor/stator pole arc | 21.5°/20.45° |
| Stack length | 151 |
| Turns per pole | 88 |
| Parameter | Experimental | Simulation |
|---|---|---|
| Tav (N.m) | 4.1519 | 3.9661 |
| Tr (%) | 72.9793 | 71.2504 |
| η (%) | 80.12 | 82.78 |
| RMSE of current (A) | 0.2007 | |
| RMSE of torque (N.m) | 0.3609 | |
| Maximum current error (A) | 0.8018 | |
| Maximum torque error (N.m) | 1.1114 | |
| Turn-on angle θon (°) | 3 | |
| Turn-off angle θoff (°) | 19 | |
| Reference current (A) | 6 | |
| Hysteresis current band (A) | 0.3 | |
| Parameter | At 627 r/min | At 806 r/min | ||
|---|---|---|---|---|
| Conventional | Proposed | Conventional | Proposed | |
| Tav (N.m) | 6.459 | 6.388 | 4.834 | 4.827 |
| IRMS (A) | 5.488 | 4.585 | 4.706 | 4.097 |
| Tr (%) | 68.763 | 30.822 | 72.821 | 36.254 |
| η (%) | 78.911 | 77.575 | 79.224 | 78.540 |
| Tav / IRMS (N.m/A) | 1.177 | 1.393 | 1.027 | 1.178 |
| θon (°) | 4.65 | 6.8 | 5.1 | 5.6 |
| θoff (°) | 19.28 | 23 | 19.55 | 22 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hamouda, M.; Abdel Menaem, A.; Rezk, H.; Ibrahim, M.N.; Számel, L. Numerical Estimation of Switched Reluctance Motor Excitation Parameters Based on a Simplified Structure Average Torque Control Strategy for Electric Vehicles. Mathematics 2020, 8, 1213. https://doi.org/10.3390/math8081213
Hamouda M, Abdel Menaem A, Rezk H, Ibrahim MN, Számel L. Numerical Estimation of Switched Reluctance Motor Excitation Parameters Based on a Simplified Structure Average Torque Control Strategy for Electric Vehicles. Mathematics. 2020; 8(8):1213. https://doi.org/10.3390/math8081213
Chicago/Turabian StyleHamouda, Mahmoud, Amir Abdel Menaem, Hegazy Rezk, Mohamed N. Ibrahim, and László Számel. 2020. "Numerical Estimation of Switched Reluctance Motor Excitation Parameters Based on a Simplified Structure Average Torque Control Strategy for Electric Vehicles" Mathematics 8, no. 8: 1213. https://doi.org/10.3390/math8081213