1. Introduction
In recent years, tools for computer simulation have become increasingly important in various fields of science. Computational experiments allow one to obtain new knowledge about the properties and dynamics of the object under investigation without the significant economic and time costs and risks that attend a full-scale experiment. To study the continuous dynamical systems described by ordinary differential equations (ODE), numerical integration methods are traditionally used. While the scale and complexity of the systems under investigation increase, one needs more sophisticated and efficient integration techniques [
1]. Therefore, the advanced numerical methods used to simulate dynamical systems should possess great stability, precision and low computational costs. In engineering applications, especially while solving high-dimensional initial value problems (IVP), multistep integration is widespread [
2].
Being compared to their single-step counterparts, multistep methods employ one call to the right-hand-side function per each integration step. To obtain the numerical solution with the desired accuracy, such algorithms reuse values calculated at previous steps. Therefore, multistep algorithms significantly exceed single-step integration in computational speed. However, the well-known problem of such integration is a decrease in numerical stability with an increase in the accuracy order of the chosen scheme. This property restricts the application of high-order multistep methods for solving stiff ODE systems excluding implicit methods, such as backward differentiation formulas (BDF) [
3]. However, the application of implicit methods involves computationally expensive approximation of the numerical solution at the next point using Newton’s method or some other iterative technique. This fact eliminates one of the main advantages of multistep algorithms—their computational simplicity and high efficiency.
Several approaches that circumvent the so-called Dahlquist order barrier, including the second derivative multistep method [
4], hybrid linear multistep methods [
5,
6,
7], and extended backward differentiation formulas [
8], were recently proposed. Being applied to the stiff ODEs, such methods have shown high numerical efficiency.
Recent studies also revealed the possibility to construct efficient implicit–explicit linear multistep methods for stiff problems [
5,
6,
9]. One of the prospective techniques combining the advantages of implicit and explicit integration for the numerical solution of differential equations is semi-implicit integration. High-performance compositional [
10] ODE solvers based on semi-implicit single-step calculations have been proposed. Efficient techniques for non-Hamiltonian systems [
11] simulation were developed based on Aitken–Neville extrapolation and the semi-implicit symmetric basic method [
12]. It has been shown that, compared with other integration algorithms, semi-implicit methods demonstrate good stability and low computational costs, which allows outperforming both explicit and implicit techniques [
13]. Thus, semi-implicit integration no longer remains a specialized tool for Hamiltonian systems and can be efficiently applied to the general class of initial value problems (IVP).
One of the most efficient single-step numerical integration techniques is extrapolation solvers [
4]. The well-known
ODEx solver, based on the Gragg–Bulirsch–Stoer method, is one of the most efficient explicit integration methods [
14]. Being implemented with adaptive stepsize it can be even more numerically efficient than embedded Runge-Kutta methods [
15]. However, although the first studies of extrapolation multistep schemes have been known since the 1970s [
12], there are no multistep extrapolation solvers presented in the modern simulation software. Thus, it is of interest to develop semi-implicit multistep methods based on numerical extrapolation techniques. In this paper, we suggest closing this gap by introducing a novel multistep ODE solver combining the advantages of the extrapolation technique and the semi-implicit symmetric basic method.
The rest of the paper is organized as follows. In
Section 2, a novel type of multistep integration methods is described and tables of coefficients are given for solvers of order 3–6 in “full” and “short” form.
Section 3 represents the set of computational experiments. We introduce several nonlinear test systems and estimate the computational efficiency of the compared methods through performance plots. In
Section 4, we investigate the stability and convergence of ESIMM methods. Finally, in
Section 5, some conclusions and discussion are given.
2. Materials and Methods
Consider a basic symmetric integration method for solving IVP of order
p. A sequence of local error terms after stepping from the point
xn to
xn+1 with a stepsize
h reads
A sequence of local error terms after stepping from the previous point
xn−1 to
xn+1 with a stepsize
2h reads
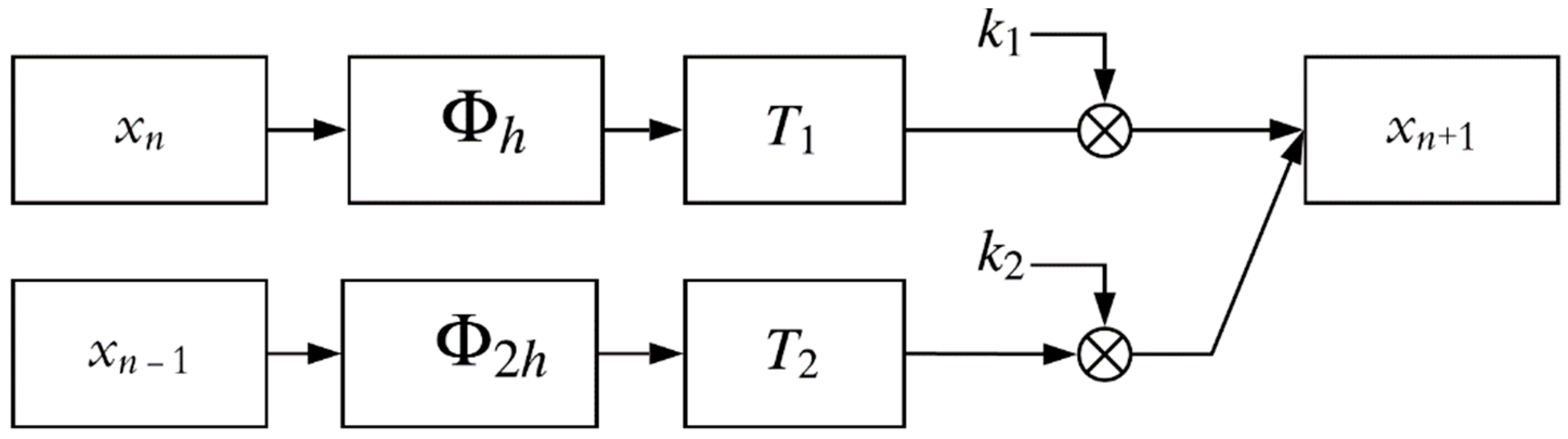
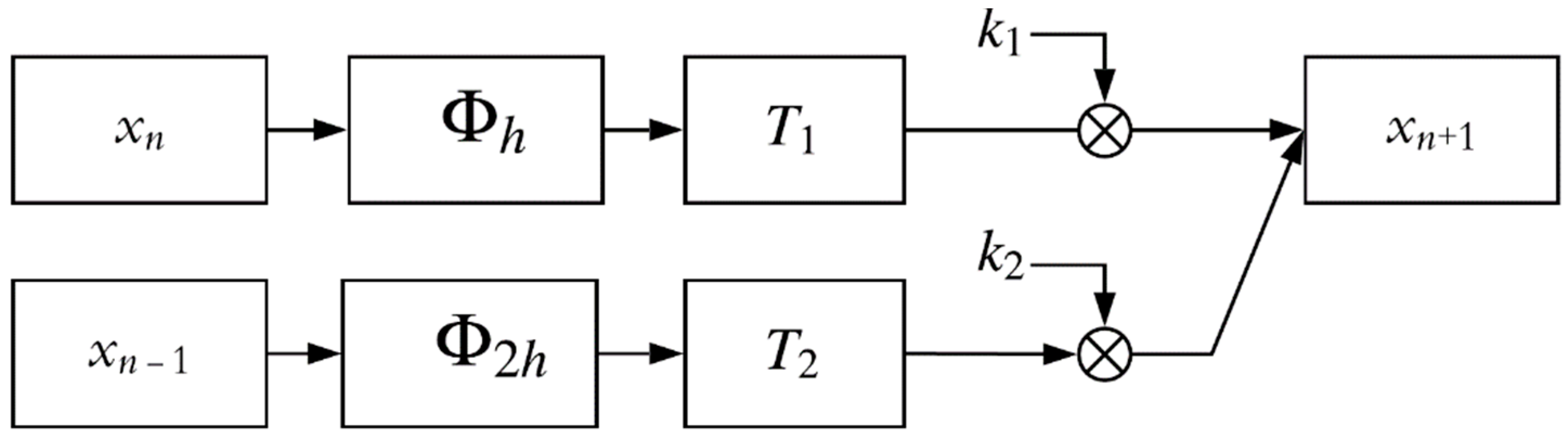
Following the idea of extrapolation methods [
4,
12], let us combine the solution at the point
n + 1 with the stepsize
h (denote it as
T1) and the solution at the same point with the stepsize
2h (denote it as
T2) as follows:
The dataflow representation of this combination is depicted in
Figure 1. Keeping in mind Aitken-Neville interpolation rule, let us select the coefficients
k1 and
k2 so as to satisfy the following conditions:
The system of Equation (4) can be analytically solved as
For example, for the method of order 3 with
p = 2 we have:
This allows eliminating the term by the error ep+1 and increasing the order by one.
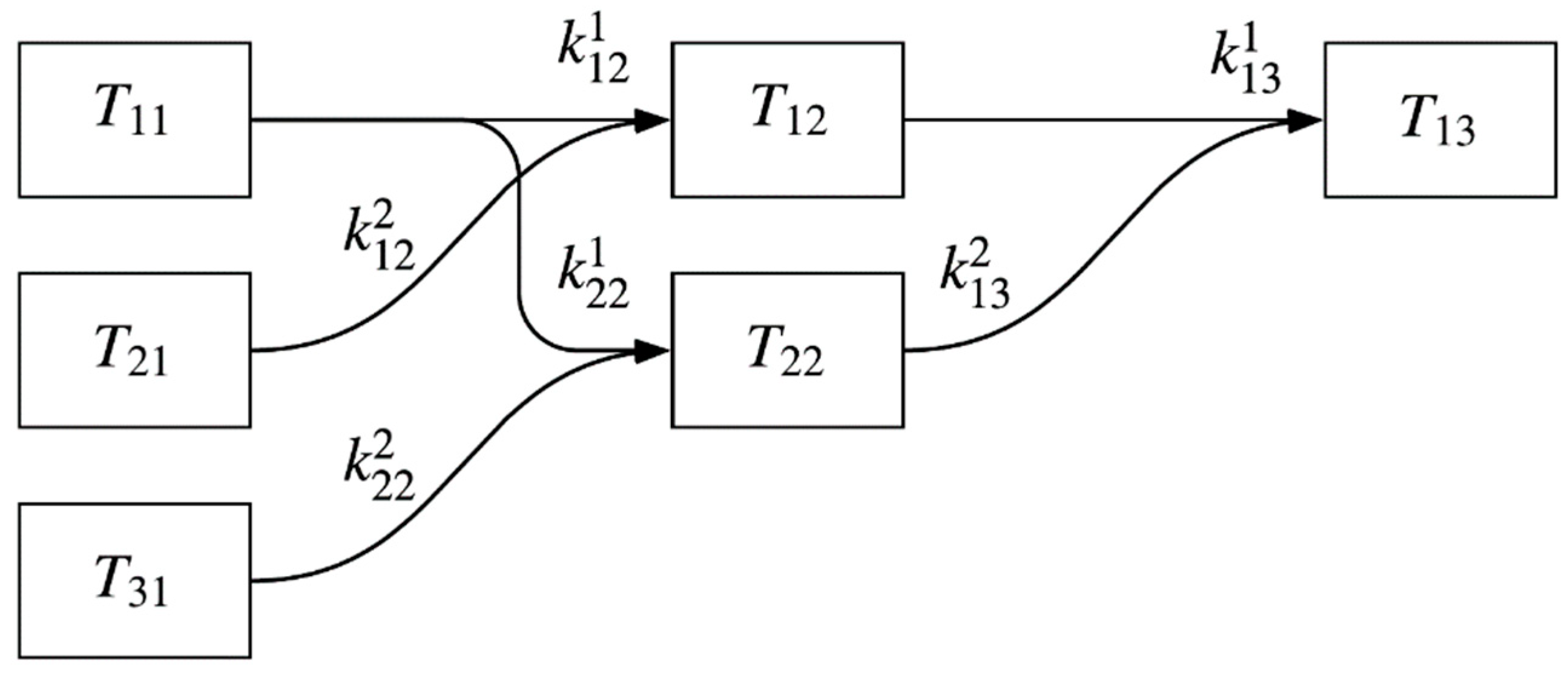
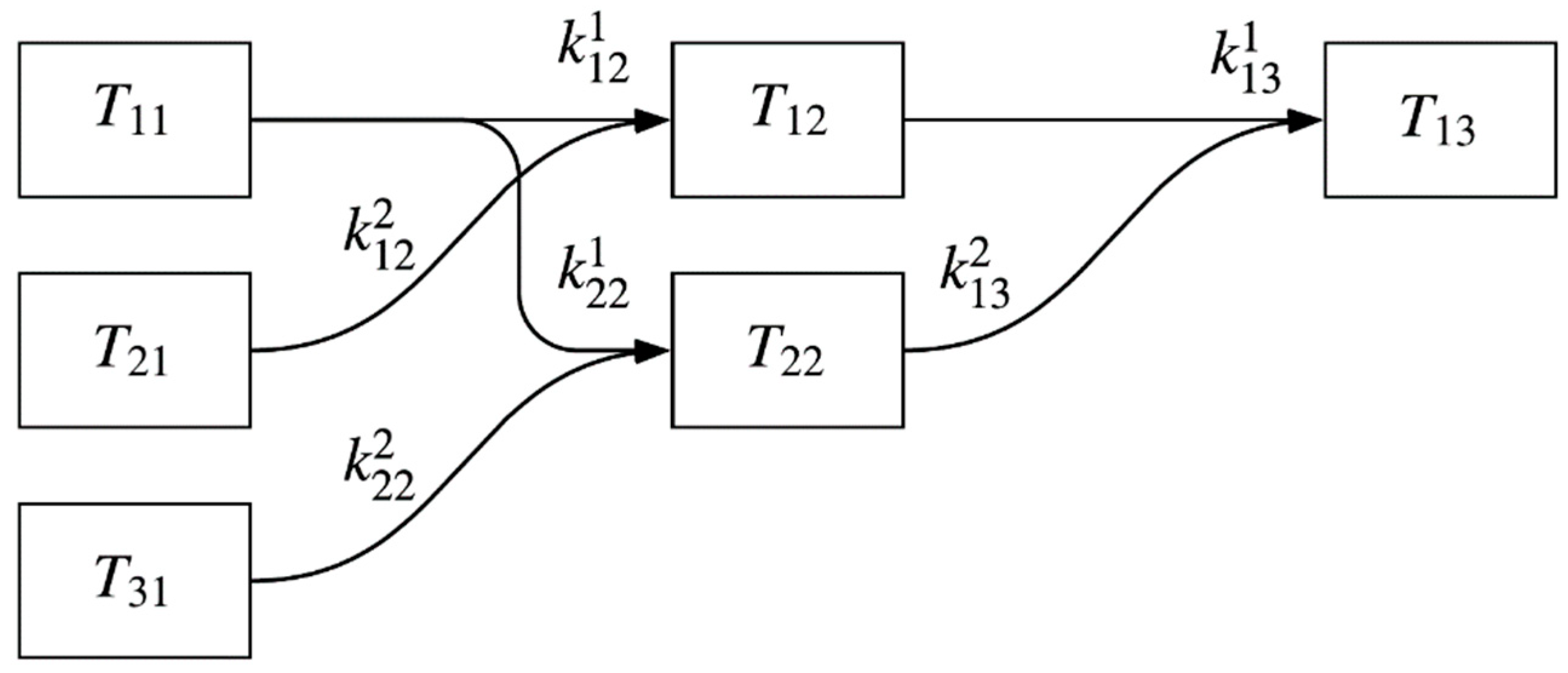
Let us organize the computational process in a cascade manner as shown in
Figure 2. The main term
Tij represents a component in the extrapolation table on
i-th stage on the
j-th line. Indices by coefficients
are the following:
m denotes whether it is the coefficient by the first or the second term, with the sum giving the term
Tij.
A general form for increasing an order can be obtained if we consider how the operation (3) affects the error terms in (1) and (2). Introducing the matrix formalism, for the coefficients on the first stage one can obtain
After the first stage of extrapolation, equations for two approximations of
denoted as
and
, which are then multiplied by
and
respectively, are as follows:
Let us rewrite them using a vector form:
Similar to the Equation (5), the final equation for
reads:
Continuing such a sequence of operations, obtain an equation for
:
Continuing this process, we can derive the coefficients for the method of an arbitrary accuracy order. For the basic symmetric method of order 2, the coefficients for the 6-order multistep extrapolation method are given in
Table 1.
Let us call the method illustrated by
Figure 2 and
Table 1, a “full” ESIMM method. However, one can use a simplified (“short”) version of the same method:
In order to obtain coefficients
for the “short” version of the method, consider the Taylor expansion for
through
up to the desired order of the error term
:
One can see, that that the sum of
equals 1, while the sum of any other terms by any power of
equals zero, which can be written as a system of linear algebraic equations:
from where
can be easily found.
Table 2 represents the coefficients for the “short” method version.
One can obtain coefficients for methods of higher order following the general logic of this approach. It should be noted that this technique is efficient only when a self-adjoint symmetric basic method is chosen. In our study, we used the semi-implicit CD [
11,
12] method of order 2, but the implicit midpoint method can be used as a basic method as well.
3. Results
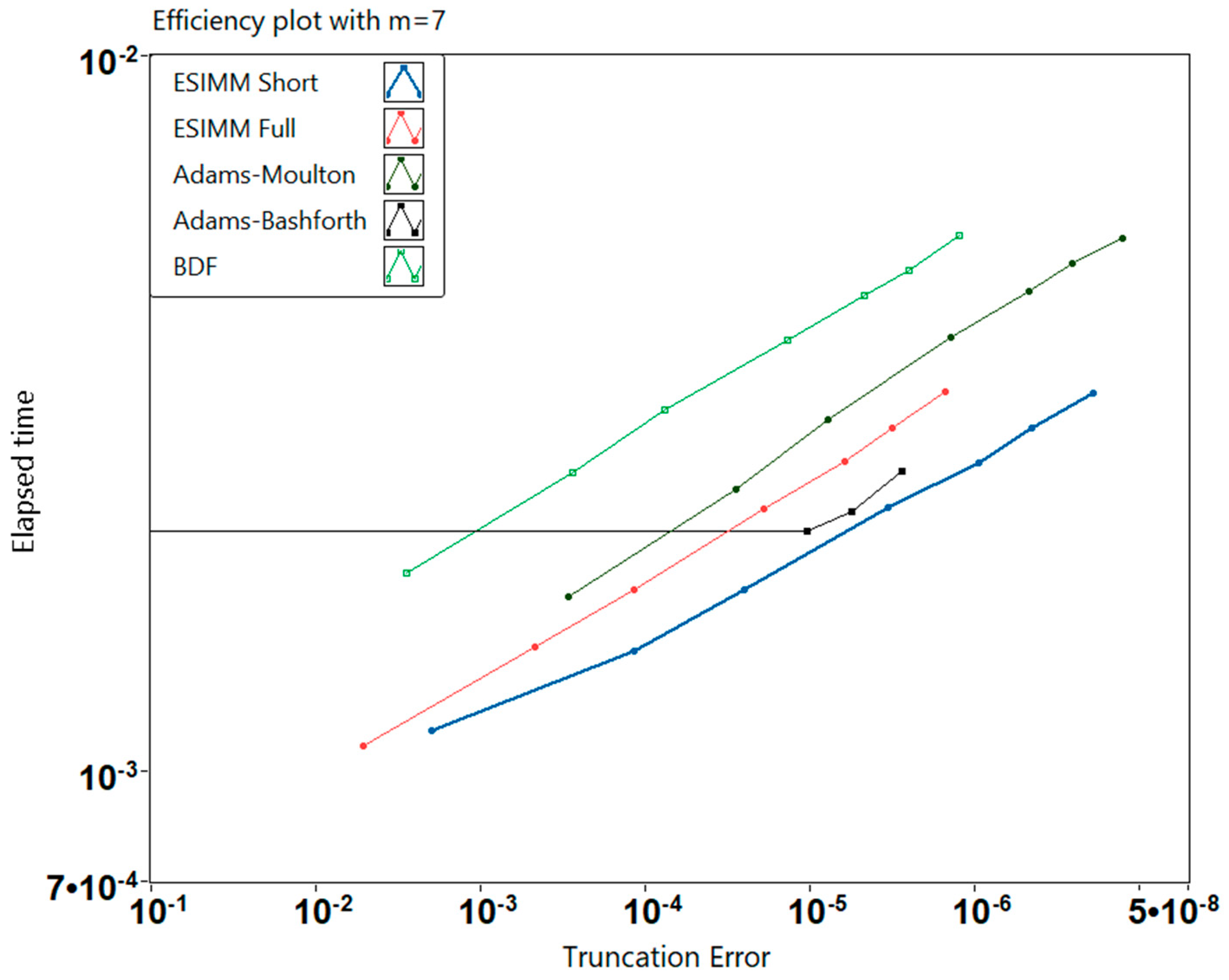
In this section, we investigate the performance of two versions of the extrapolation semi-implicit multistep (ESIMM) method. Let us recall, that the first version is labeled as “full” and obtains a solution using a direct calculation scheme with the full set of coefficients per each solution step. The second version, named “short”, uses pre-calculated coefficients values for each stage and sums the weighted results, which results in an increased calculation speed at the cost of a possibly insignificant decrease in accuracy compared to the “full” version due to the round-off error. All multistep methods under investigation were used with the Dormand–Prince 8 (DOPRI8) method as a starting solver and reference solution. All the experiments were performed in an NI LabVIEW 2018 environment with double floating-point precision.
We have chosen several well-known nonlinear dynamical systems as a test set for the numerical method investigation.
3.1. Rössler Attractor
The system was proposed by Otto E. Rossler [
16], and can be described as follows:
where
a,
b and
c are system parameters. The semi-implicit basic method of order 2 for the system (8) can be formulated as [
11,
12,
13]:
We carried out experiments with the following parameter values:
a = 0.2,
b = 0.2,
c = 5.7. Other simulation parameters, including simulation time, stepsize values, initial conditions and number of measurements are given in
Table 3.
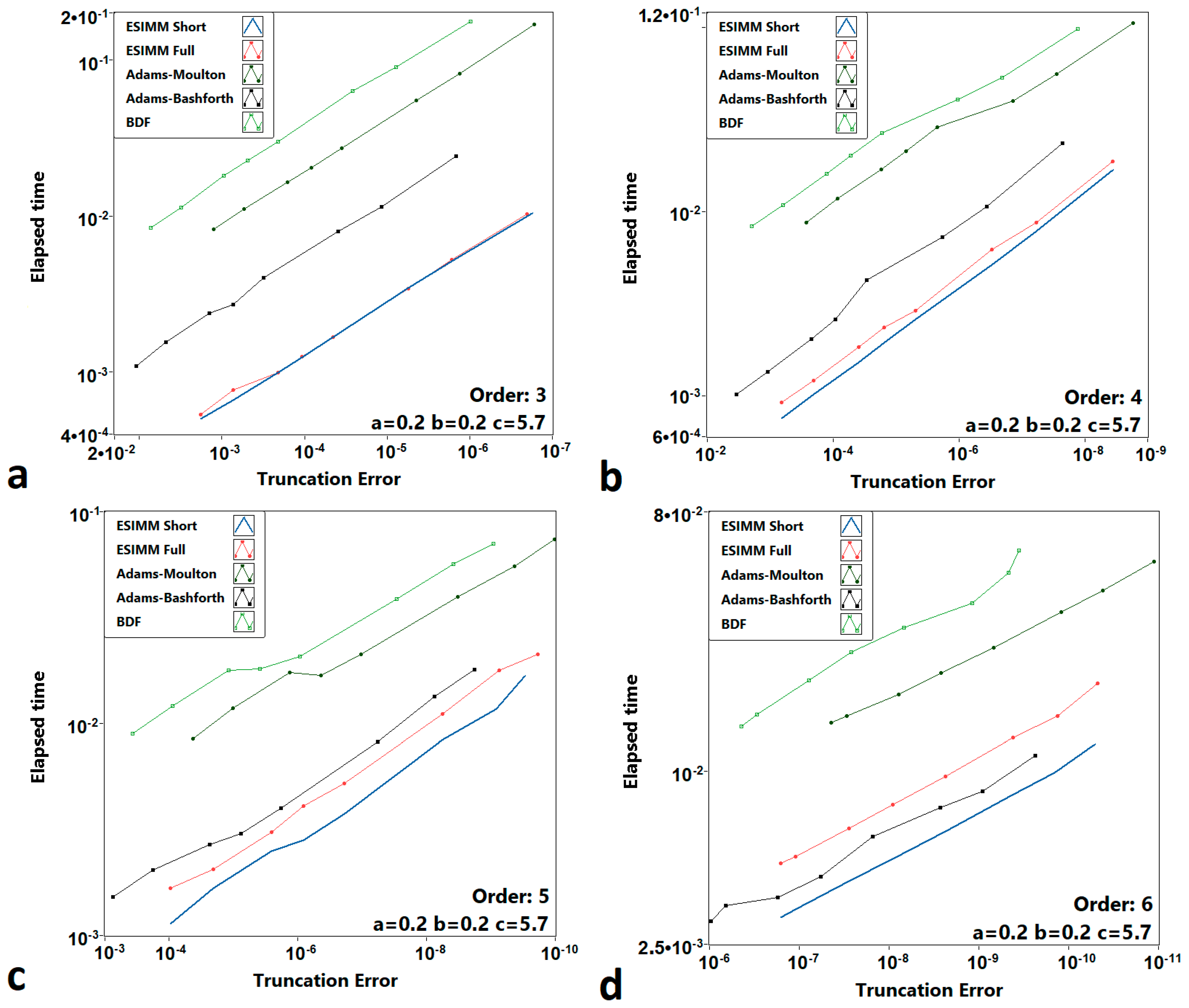
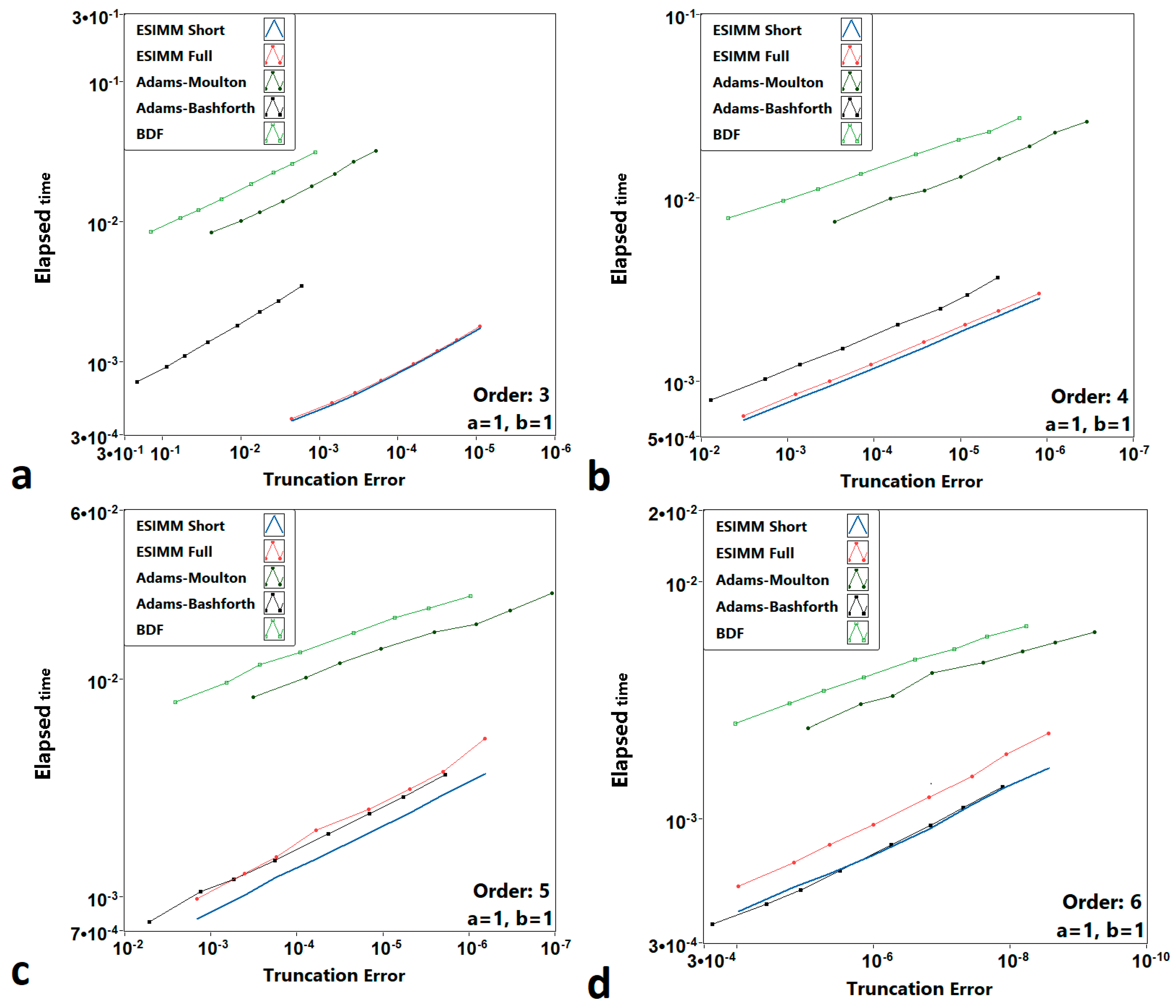
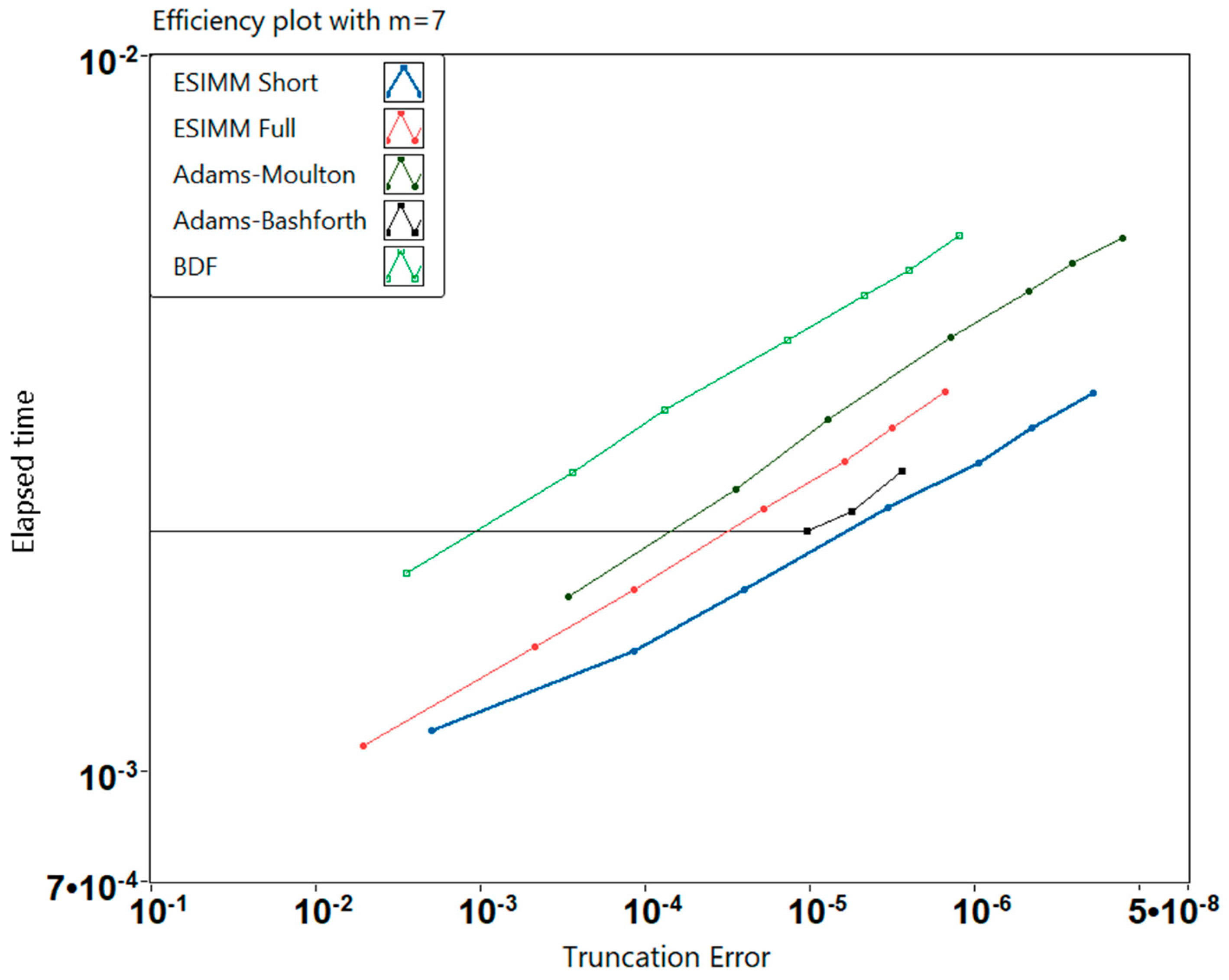
One can see from
Figure 3 that the proposed semi-implicit extrapolation multistep method (ESIMM) possesses better performance than well-known linear multistep methods. The “short” version of ESIMM provides a great balance between computational cost and accuracy, while the “full” version is slightly more precise but requires more time to perform calculations. Classical explicit multistep methods such as Adams–Bashforth tend to have closer performance in higher-order schemes but are still significantly less accurate compared to the proposed method.
3.2. Sprott System Case A and Case E
These two systems were proposed by J.C. Sprott in his famous paper [
17] and can be written as following initial value problems:
Sprott Case A is a conservative chaotic system and exhibits chaotic behavior with parameter values
a = 1,
b = 1. The basic semi-implicit symmetric algorithm for the Sprott Case A system is as follows:
The semi-implicit basic method for the Sprott Case E system can be written as:
Parameter value
d = 11 corresponds to the chaotic regime of oscillations.
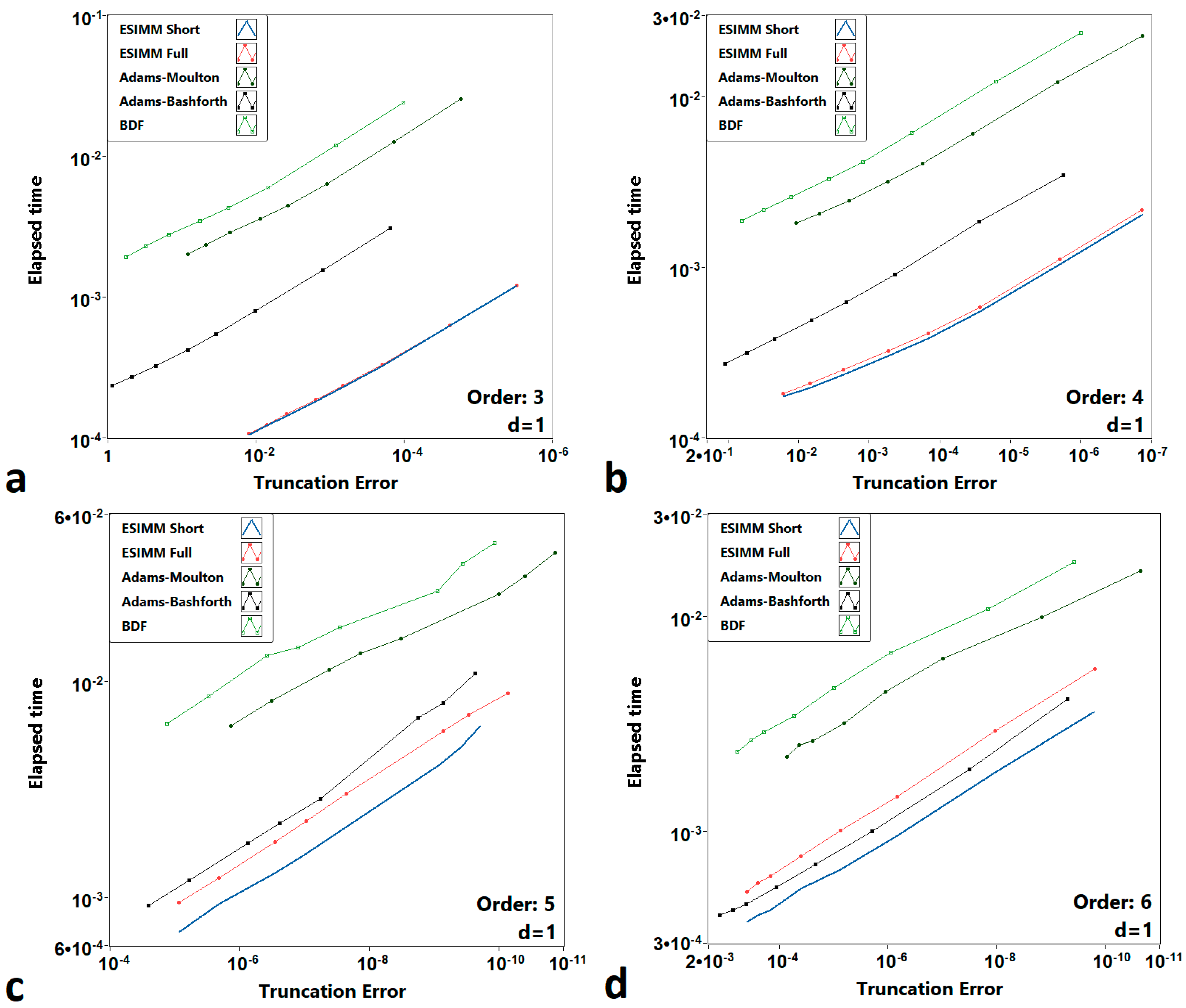
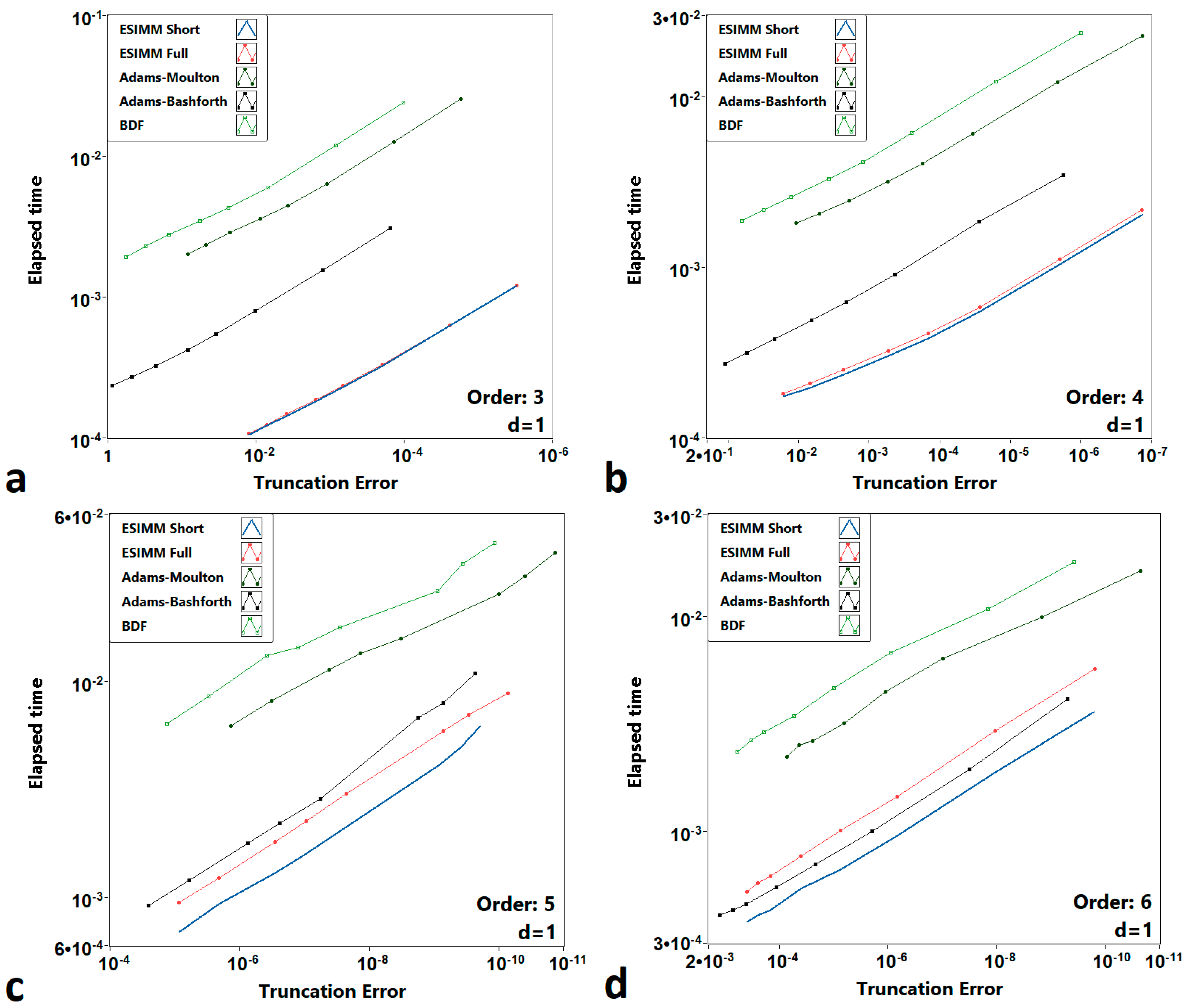
Figure 4 represents the performance analysis for all investigated methods including the proposed ESIMM algorithms.
The rest of the parameters used to perform the numerical experiments with the system (9) are given in
Table 4. One can see from
Figure 4 that the performance of the ESIMM methods in the case of the conservative chaotic system Sprott Case A was unexpectedly lower despite the symmetry of the underlying basic semi-implicit method.
Thus, the numerical efficiency of the ESIMM algorithm decreases with the increase in accuracy order due to the one extra calculation of RHS function per order, unlike classical multistep methods.
The simulation of the Sprott Case E system confirmed the preliminary results. One can see from
Figure 5 that the performance gain of ESIMM methods over the Adams–Bashforth method decreases as the order of the scheme increases. However, the overall results are inspiring due to the known fact that the application of Adams–Bashforth method with orders of accuracy 6 and higher is rare due to the stability issues.
Table 5 gives some information on the simulation parameters.
By analyzing results shown in
Figure 4 and
Figure 5, one can conclude that the semi-implicit ESIMM methods perform well with both conservative (Sprott case A) and dissipative (Sprott case E) systems. They are significantly faster than all other listed methods and give us a rather accurate representation of systems behavior. However, implicit multistep methods such as Adams–Moulton can be more accurate than ESIMM in higher-order schemes, but the proposed method proposes the best trade-off between precision and simulation time, which is extremely important in long-term simulations. To investigate the impact of stiffness on the investigated methods, we additionally considered one more system that is well known as a testbench for numerical integration methods.
3.3. Van der Pol System
This classical nonlinear oscillator was proposed by Balthasar van der Pol [
18] and can be written as the following IVP:
This system is important for our study because the value of parameter
m determines the stiffness of the system. The algorithm of the basic symmetric CD method for the system (11) is as follows:
The simulation parameters are given in
Table 6. The parameter
m initially was set to 1, but for higher-order schemes we reduced it to 0.5 to avoid the loss of stability of explicit methods.
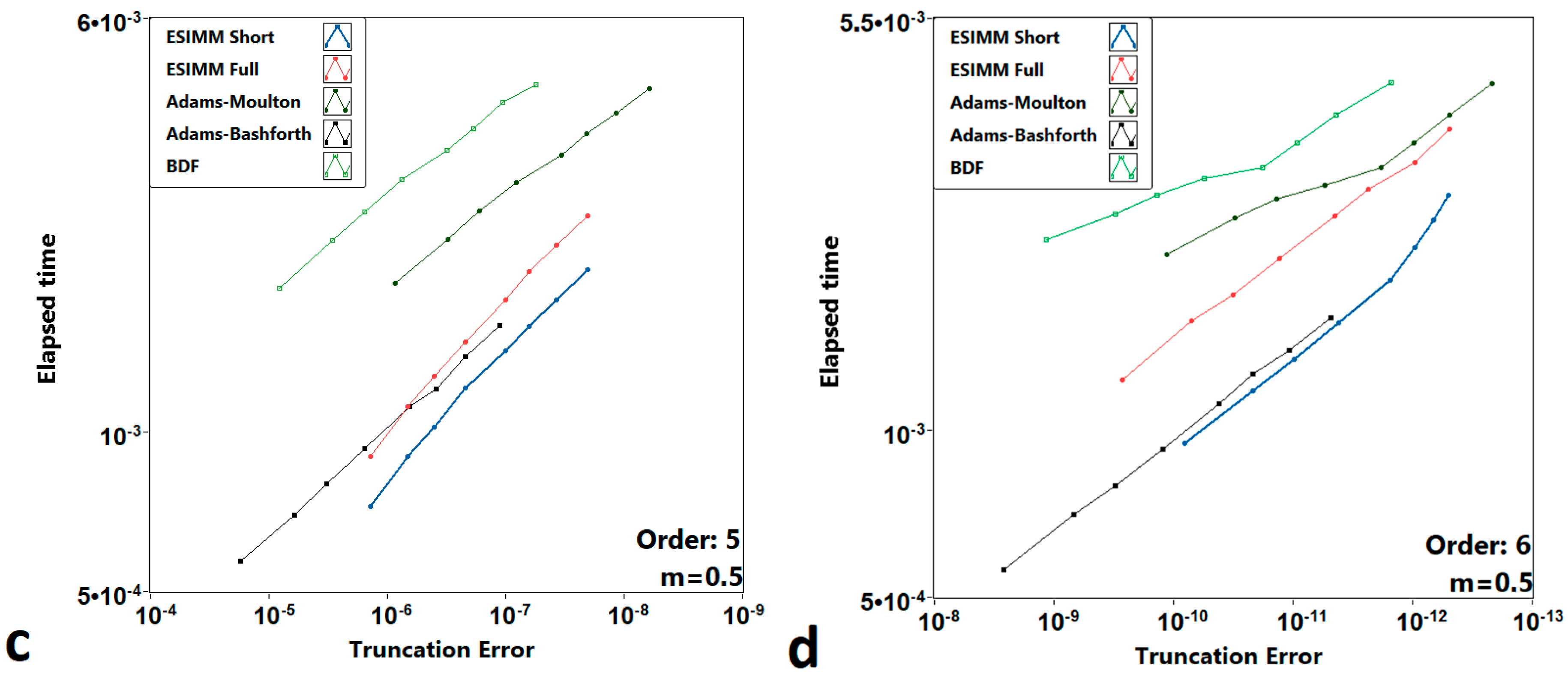
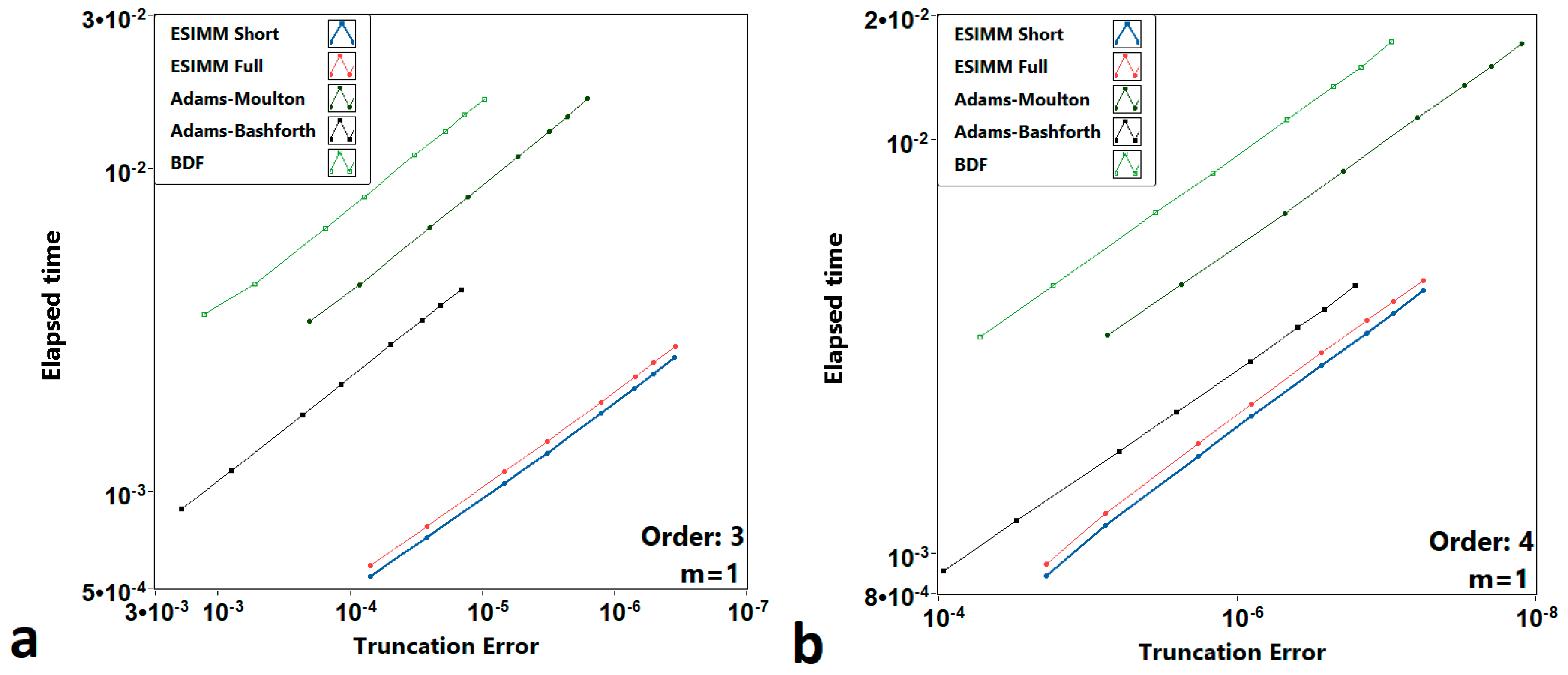
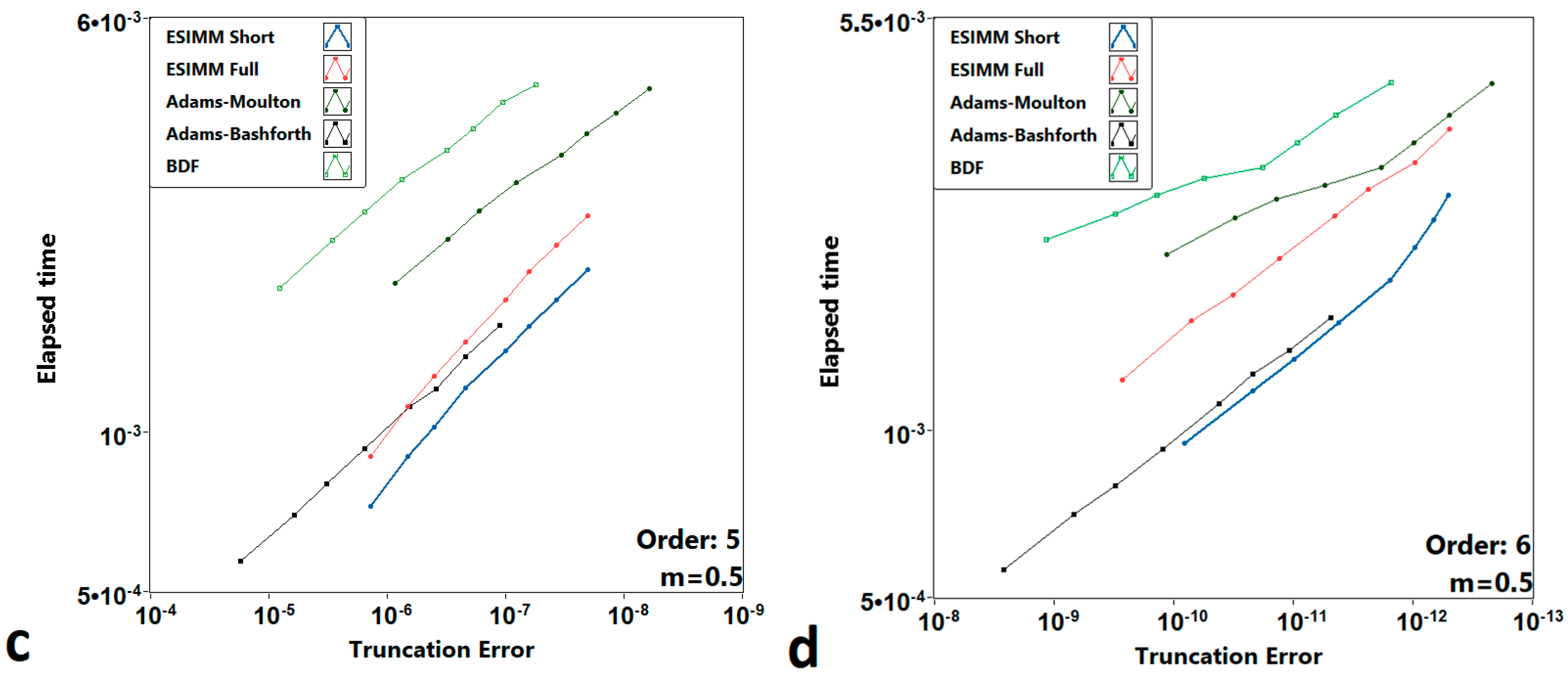
We varied the initial conditions during the experiments to ensure that they do not significantly affect the obtained results. The performance plots for the van der Pol system are shown in
Figure 6.
One can see from
Figure 6 that implicit linear multistep methods are slightly more accurate than other considered algorithms. Explicit methods such as Adams–Bashforth are, on the other hand, as fast as semi-implicit ones but they lose their accuracy due to less numerical stability. Further increase in
m leads to total stability loss for Adams–Bashforth methods. We illustrated this in the final experiment with this system, the results of which are shown in
Figure 7. One can see the higher stability of semi-implicit multistep methods in comparison with their well-known explicit counterparts. However, the Adams–Moulton method appears to be the most precise among the investigated algorithms, but the “short” version of the ESIMM solver generally outperforms it due to lower computational costs.
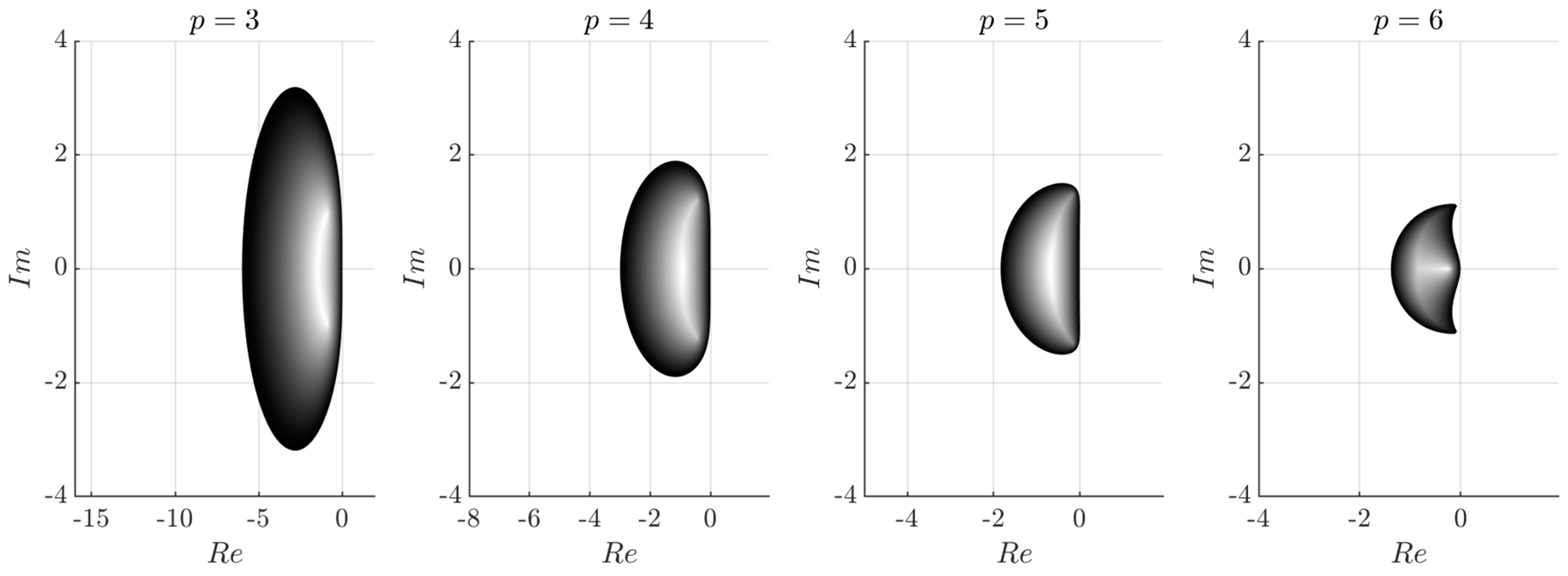
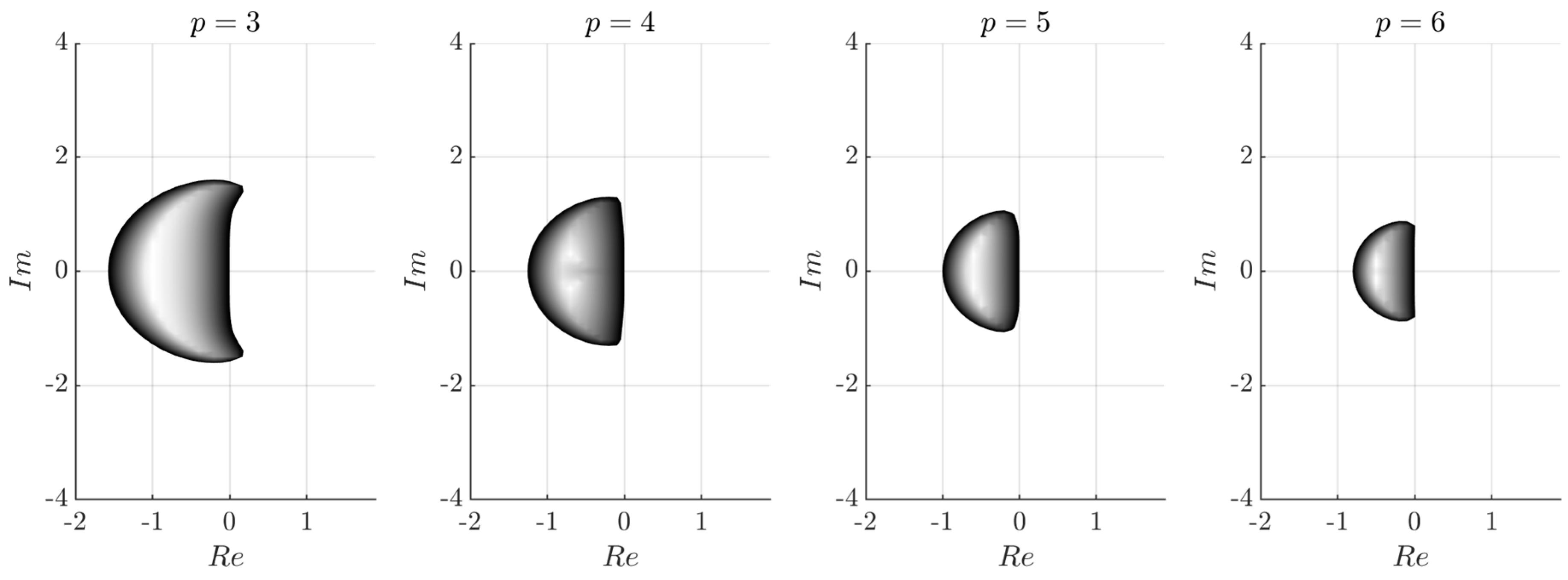
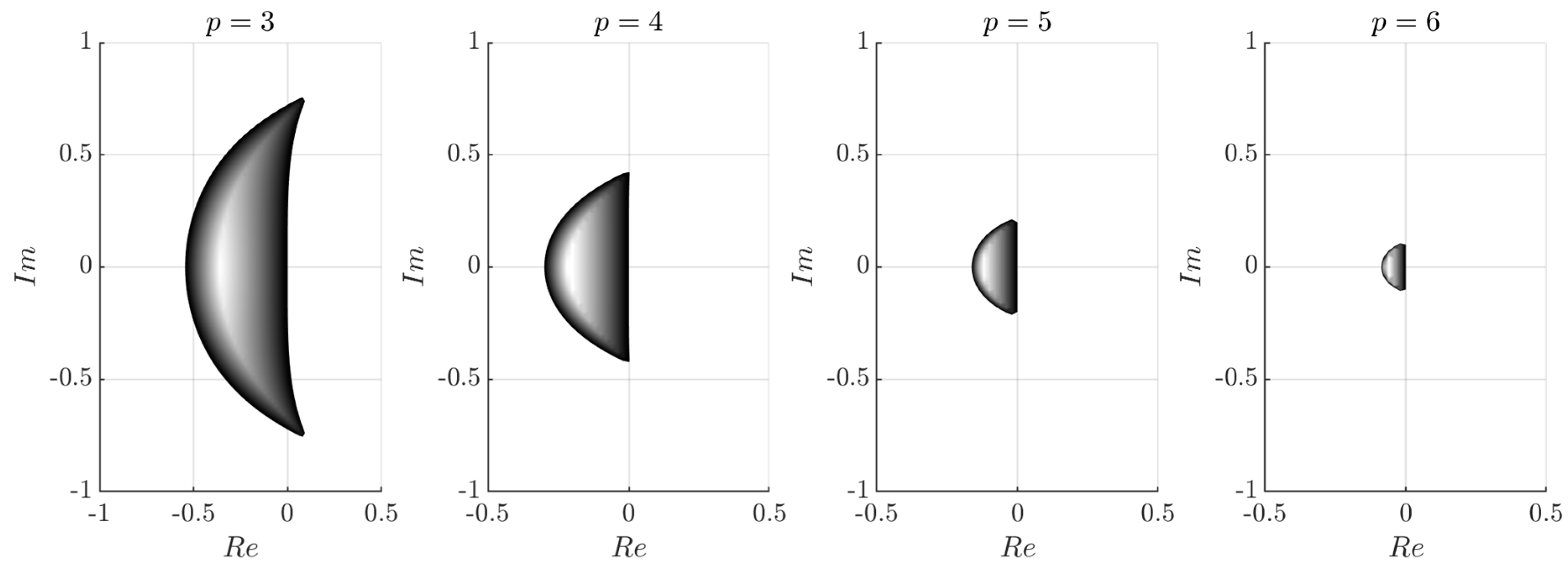
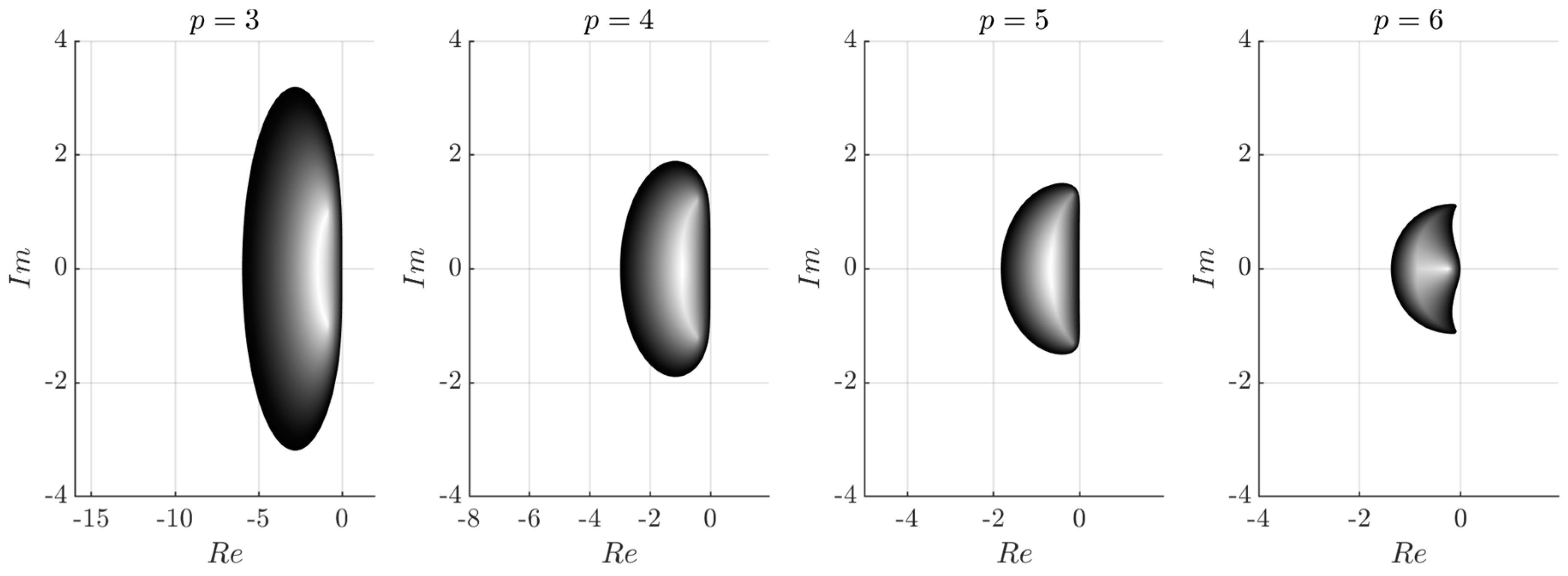
5. Conclusions and Discussion
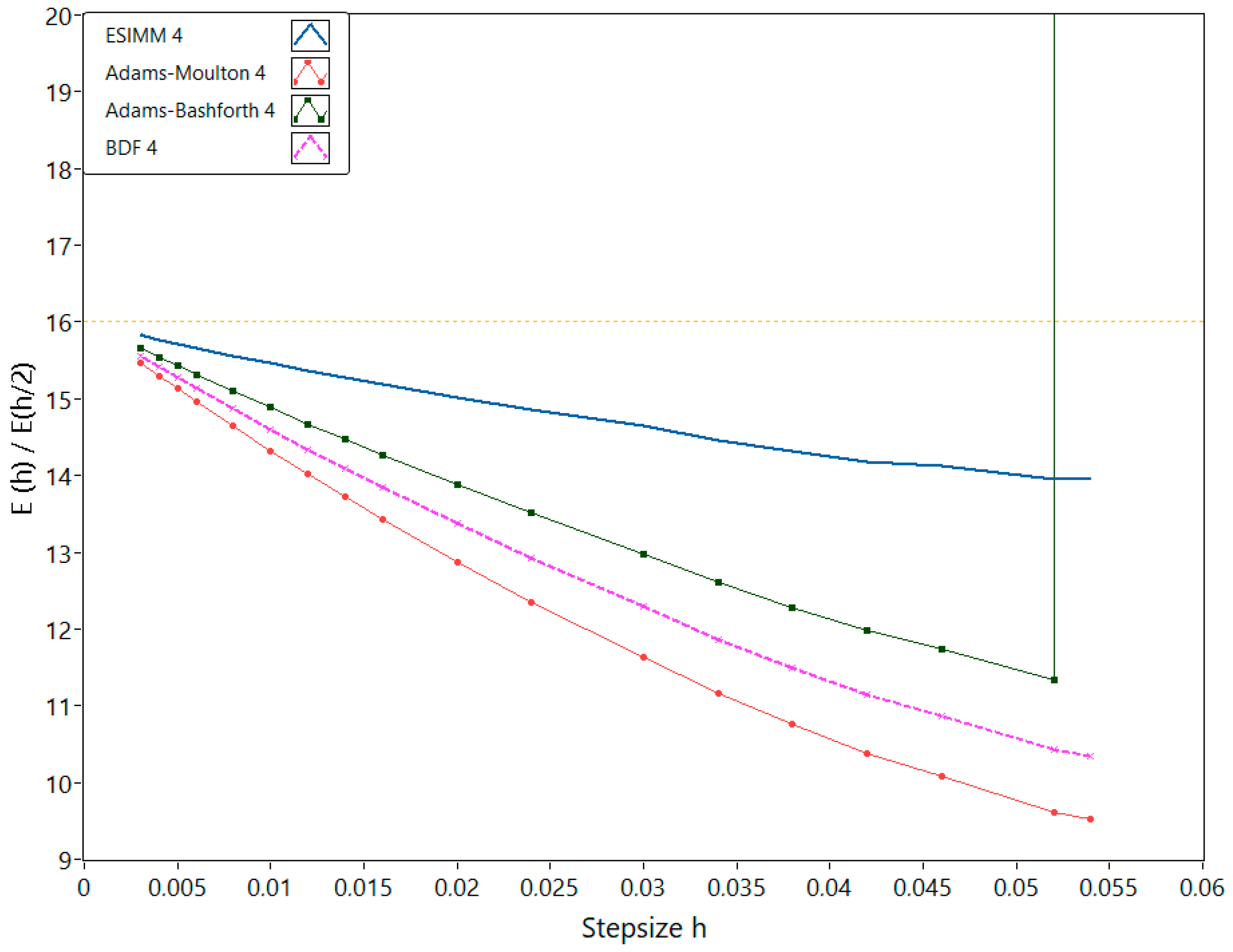
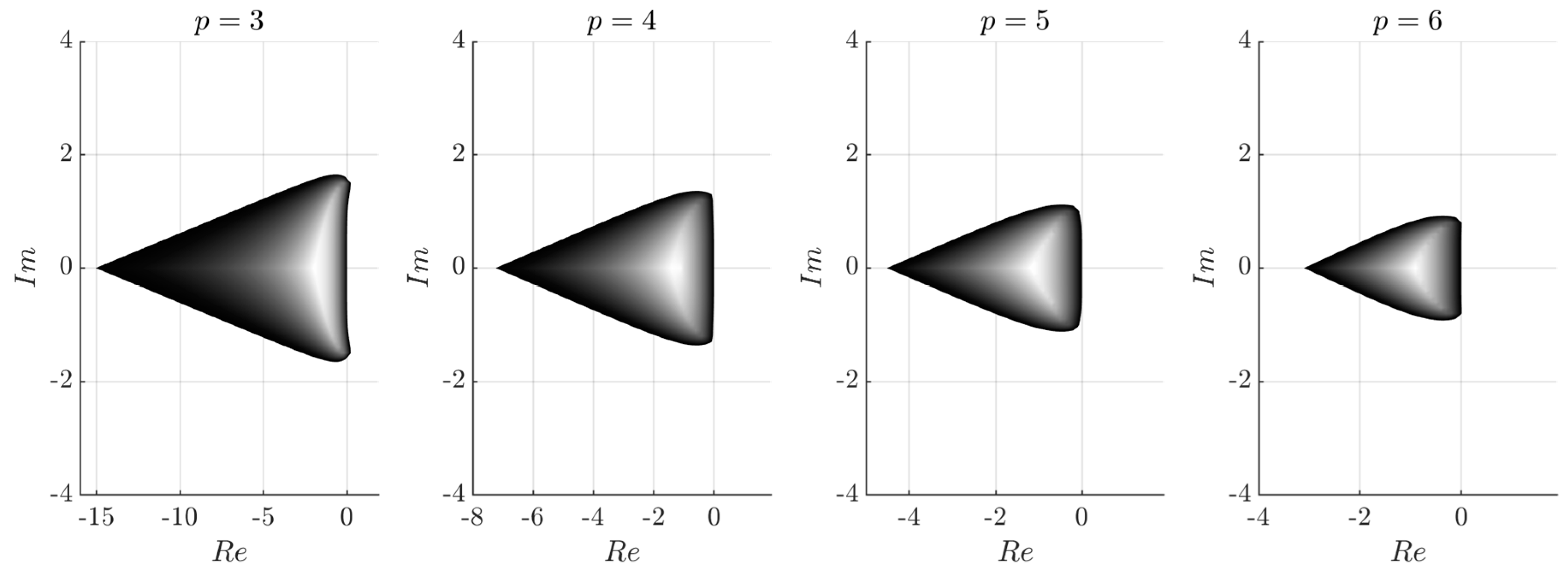
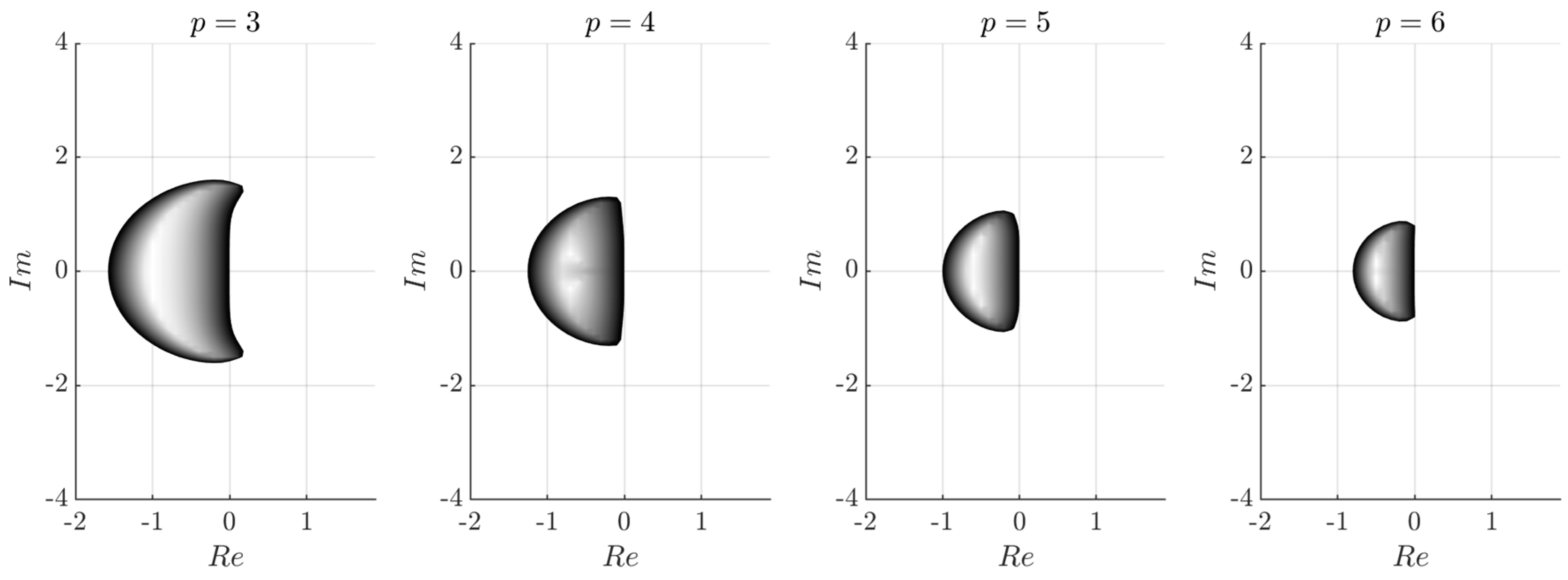
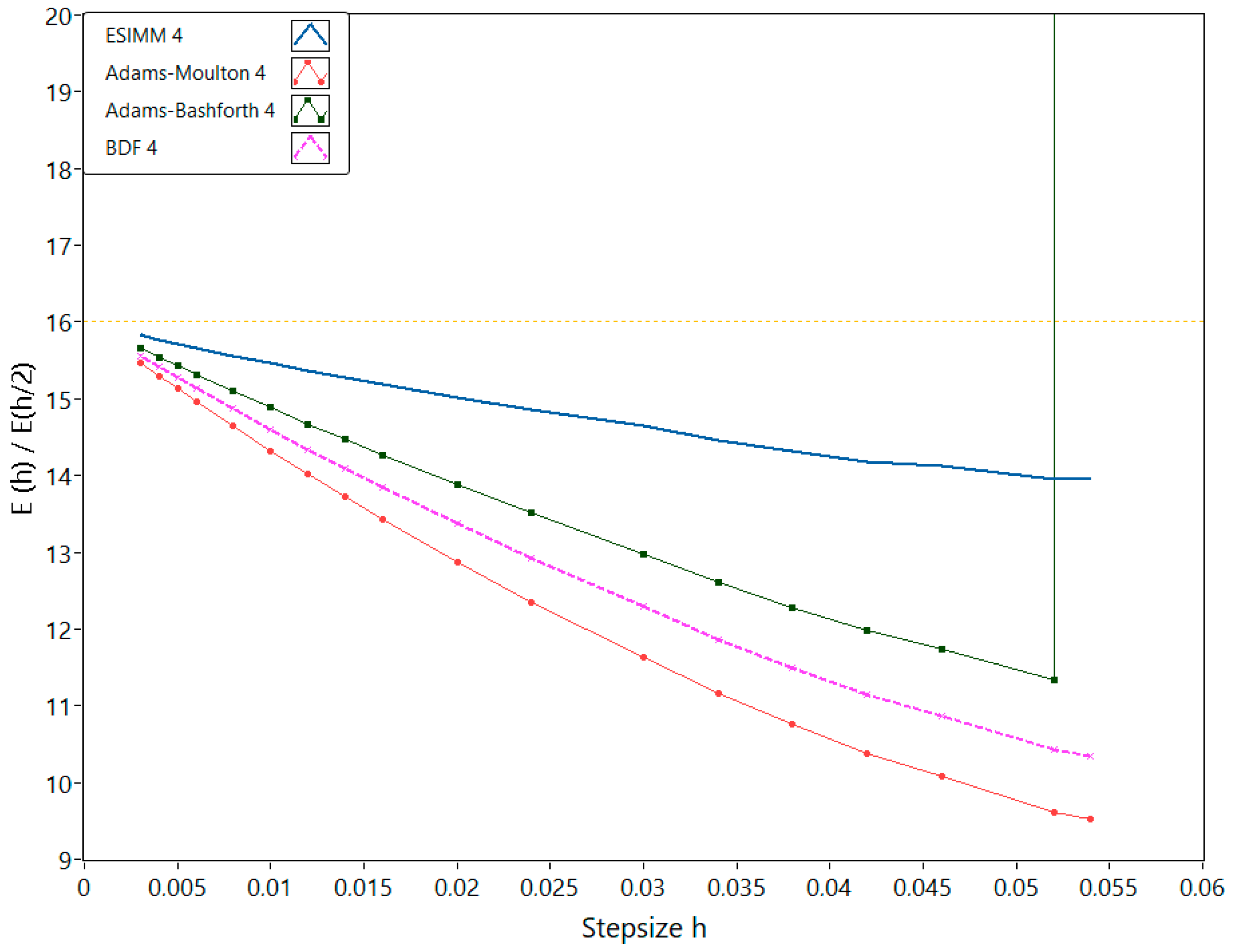
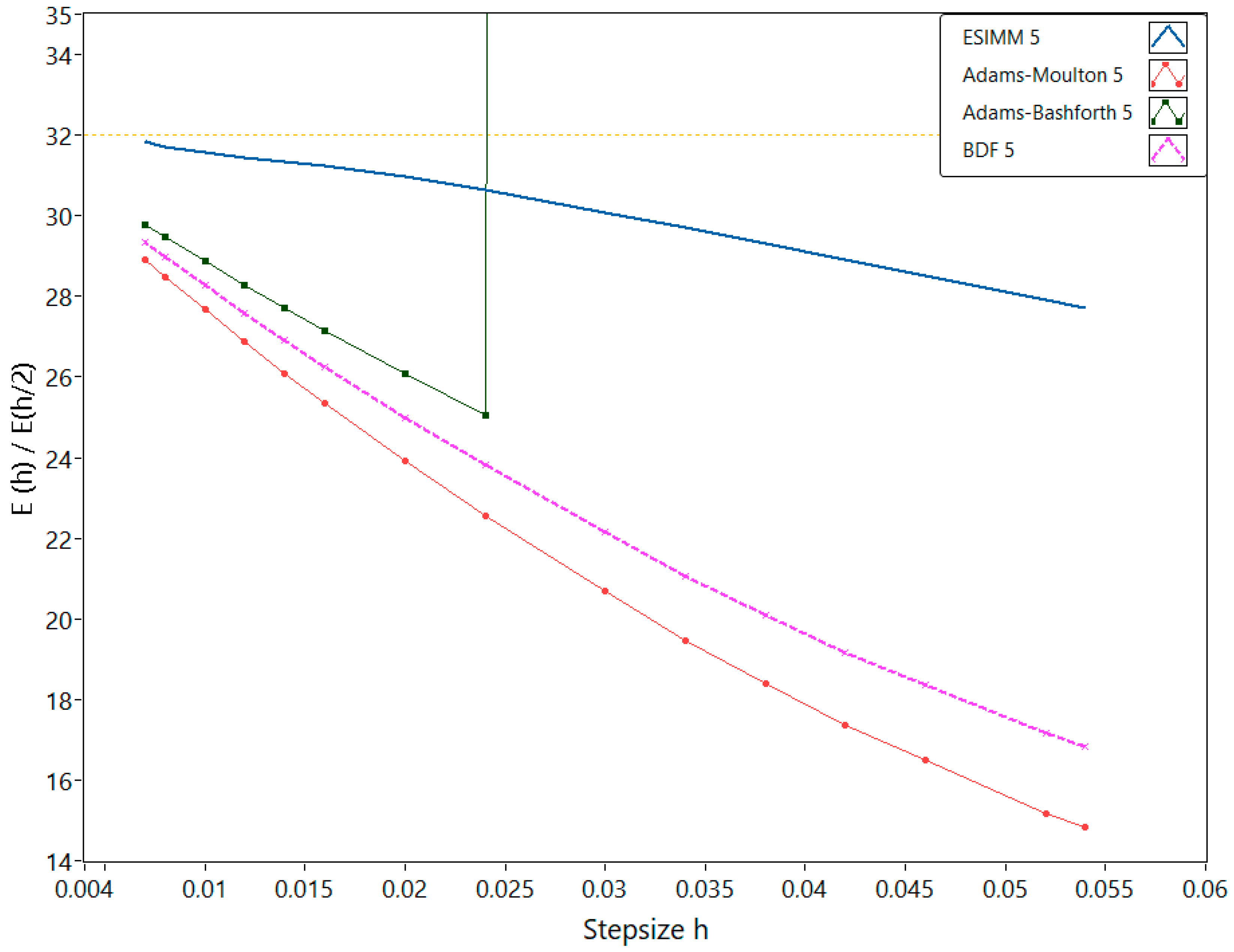
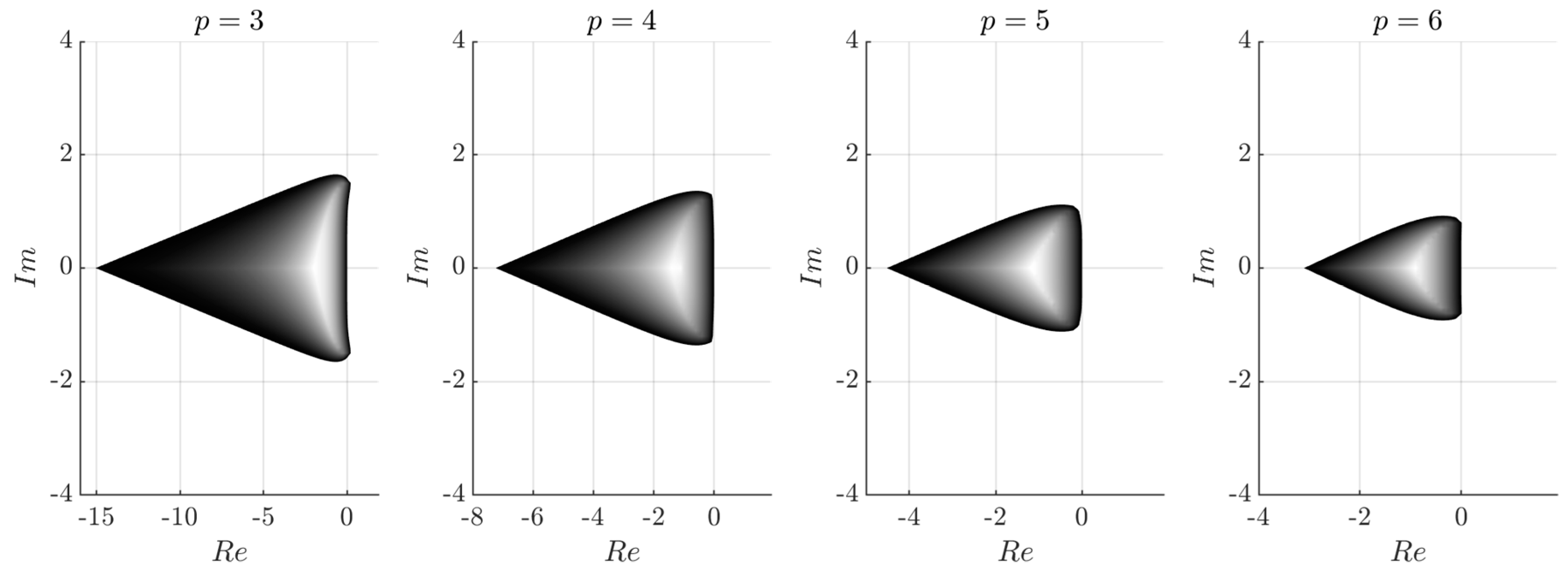
In this paper, we proposed novel multistep extrapolation methods based on semi-implicit symmetric integration. We explicitly show that the proposed ESIMM integration technique in many cases of nonlinear systems possesses greater performance then well-known multistep ODE solvers. We investigated the order and convergence of the investigated methods experimentally through the order plots using Rossler chaotic system as a testbench. One of the important research questions was the analytical estimation of the numerical stability of ESIMM methods. The investigation of the numerical stability of semi-implicit methods is rather complicated due to their non-trivial call to the right-hand-side function. We used a technique based on second-order linear test problems [
11,
20] which allowed plotting stability regions for ESIMM and comparing them with stability regions of linear multistep methods.
We explicitly show that the proposed ESIMM solvers are more numerically stable than explicit Adams–Bashforth methods, and, in some cases, implicit Adams-Moulton methods. Moreover, the stepsize range where the order of ESIMM methods preserves, theoretically allows constructing highly efficient multistep extrapolation solvers with adaptive stepsize. Being based on numerical extrapolation, ESIMM methods possess the same capacity to construct built-in estimators of local truncation error as single-step extrapolation solvers. Besides, the ESIMM ODE solvers do not need the concatenation procedure for output data obtained during the starting method and main solution, which also simplifies and fastens the algorithm. The computational cost of the proposed methods was estimated experimentally and is visualized through the performance plots. The program implementation of the proposed methods is significantly simpler than for implicit multistep solvers. Speaking generally, the ESIMM methods are almost as simple as explicit multistep methods, being almost as precise as implicit multistep methods. One of the main drawbacks of the ESIMM method is the necessity to increase the number of basic method calculations by 1 per each increase in the accuracy order. Therefore, high-order solvers, based on the proposed technique, can be less efficient.
In our further studies we plan to implement ESIMM solvers with adaptive stepsize, which requires the development of special step control and coefficient recalculation techniques. ESIMM methods based on other symmetric integrators, e.g., implicit midpoint method or composition solvers [
10], are also to be studied.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}