1. Introduction
Fractional calculus is a mathematical branch investigating the properties of derivatives and integrals of non-integer orders. The significance of this subject falls in the fact that the fractional derivative has the feature of nonlocal nature. This property makes these derivatives suitable to simulate more physical phenomena such as earthquake vibrations, polymers, and so forth; see, for example, References [
1,
2,
3,
4,
5,
6,
7,
8,
9,
10] and the references cited therein.
In recent years, there have appeared different types of fractional derivatives. However, it has been realized that most of these derivatives lose some of their basic properties that classical derivatives have such as the product rule and the chain rule. Fortunately, Khalil et al. [
11] defined a new well-behaved fractional derivative, called the “conformable fractional derivative”, which depends entirely on the classical limit definition of the derivative. Thereafter, researchers developed the conformable derivative and obtained different results exposing its features [
12,
13,
14]. Recently, Jarad et al. [
15] introduced the generalized proportional fractional (GPF) derivative of Caputo and Riemann-Liouville type involving exponential functions in their kernels. The GPF derivative not only preserves classical properties but also verifies semi group property and of nonlocal behavior. For recent results involving GPF derivative, one can refer to References [
16,
17,
18].
In 2012, Grace et al. [
19] initiated the study of oscillation theory for fractional differential equations. Thereafter, many researchers have investigated the oscillatory properties of fractional differential equations; see for instance References [
20,
21,
22,
23,
24,
25]. In 2019, Aphithana et al. [
24] studied forced oscillatory properties of solutions to the conformable initial value problem of the form
where
,
,
p,
,
,
are continuous functions,
is the left conformable derivative of order
of
x,
in the Riemann-Liouville setting and
is the left conformable integral operator of order
,
,
.
They also studied the forced oscillation of conformable initial value problems in the Caputo setting of the form
where
,
, and
is the left conformable derivative of order
of
x,
in the Caputo setting.
In 2020, Sudsutad et al. [
26] established some oscillation criteria for the following generalized proportional fractional differential equation
with
,
is the generalized proportional fractional derivative operator of order
,
,
in the Riemann-Liouville setting and
is the generalized proportional fractional integral operator.
In this paper, motivated by the above papers, we establish some sufficient conditions for forced oscillation criteria of all solutions of the generalized proportional fractional (GPF) initial value problem with damping term in the Riemann-Liouville type of the form:
where
,
,
is the left GPF derivative of order
of
y,
in the Riemann-Liouville setting and
is the left GPF integral of order
,
,
,
and
p,
,
,
.
Moreover, we study the forced oscillation criteria of all solutions of the GPF initial value problem with damping term in the Caputo type of the form
where
,
,
is the left GPF derivative of order
of
y,
in the Caputo setting and
, and
is the proportional derivative defined in Reference [
13].
We claim that the results of this paper improve and generalize previously existing oscillation results in Reference [
24].
Definition 1. The solution y of problem (
1)
(respectively (
2)
) is called oscillatory if it has arbitrarily large zeros on ; otherwise, it is called nonoscillatory. An equation is called oscillatory if all its solutions are oscillatory. 2. Preliminaries
In this section, we provide some basic definitions and results which will be used throughout this paper. For the justifications and proofs, the reader can consult References [
13,
15].
Definition 2. [15] (Modified Conformable Derivatives). For , let the functions be continuous such that for all we haveand , , , . Then, Anderson et al. [
13] defined the modified conformable differential operator of order
by
provided that the right-hand side exists at
and
The derivative given in (
4) is called a proportional derivative. For more details about the control theory of the proportional derivatives and its component functions
and
, we refer the reader to [
27].
Of special interest, we shall restrict ourselves to the case when
and
.
Therefore, (
4) becomes
Notice that
and
. It is clear that the derivative (
5) is somehow more general than the conformable derivative which does not tend to the original function as
tends to 0.
To find the associated integral to the proportional derivative in (
5), we solve the following equation
The above equation is a first order linear differential equation and its solution is given by
Define the proportional integral associated to
by
where we accept that
Lemma 1. [15] Let f be defined on and differentiable on and . Then, we have Definition 3. [15] For and , we define the left GPF integral of f bywhere is the left Riemann-Liouville fractional integral of order α. The right GPF integral ending at b, however, can be defined bywhere is the right Riemann-Liouville fractional integral of order α. Definition 4. [15] For and , we define the left GPF derivative of f by The right GPF derivative ending at b is defined bywhere . If we let
in Definition 4, then one can obtain the left and right Riemann-Liouville fractional derivatives as in [
6]. Moreover, it is clear that
Lemma 2. [15] Let and Then, Definition 5. [13] (Partial Conformable Derivatives). Let , and let the functions be continuous and satisfy (
3)
. Given a function such that exists for each fixed , define the partial differential operator via Definition 6. [13] (Conformable Exponential Function). Let , the points with , and let the function be continuous. Let be continuous and satisfy (
3)
, with and Riemann integrable on . Then the exponential function with respect to in (
4)
is defined to be Using (
4)
and (
14)
, we have the following basic results. Lemma 3. [13] (Basic Derivatives). Let the conformable differential operator be given as in (
4),
where . Let the function be continuous. Let be continuous and satisfy (
3)
, with and Riemann integrable on . Assume the functions f and g are differentiable as needed. Then ;
;
;
;
for and fixed , the exponential function satisfies for given in (
14);
for and for the exponential function given in (
14)
, we have
Definition 7. [15] For and with , we define the left GPF derivative of Caputo type starting at a by The right GPF derivative of Caputo ending at b is defined bywhere . Lemma 4. [15] For and , we have Proposition 1. [15] Let be such that and . Then, for any and , we have - (i)
- (ii)
- (iii)
5. Examples
This section include some examples for the illustration of our main results.
Example 1. Consider the following GPF initial value problem Setting
,
,
,
,
,
,
and
. The assumption
is satisfied if
. Then,
Set a point
. Hence, we compute that
By setting
, we can get the above integral as
Let as the result of , and . Thus, we know that and are convergent.
Hence, we set
and
Select the sequence
,
, then
Firstly, we consider the following limit:
Secondly, we know that
and
. Hence, for (
48), we have
Similarly, selecting the sequence
, we can obtain
Therefore, by Theorem 1 all solutions of the problem (
47) are oscillatory.
Example 2. Consider the following GPF Caputo initial value problem Setting
,
,
,
,
,
,
and
. The assumption
is satisfied if
. Then, we get
Set
with
. Hence, we can compute that
By setting
, we can get the above integral as
Let as the result of , and . Thus, we know that and are convergent.
Hence, we can set
and
Select the sequence
,
, then we compute the following term:
Firstly, we consider the following limit:
Secondly, we know that
and
. Hence, for (
50), we have
Similarly, selecting the sequence
, we can obtain
Therefore, by Theorem 2 all solutions of the problem (
49) are oscillatory.
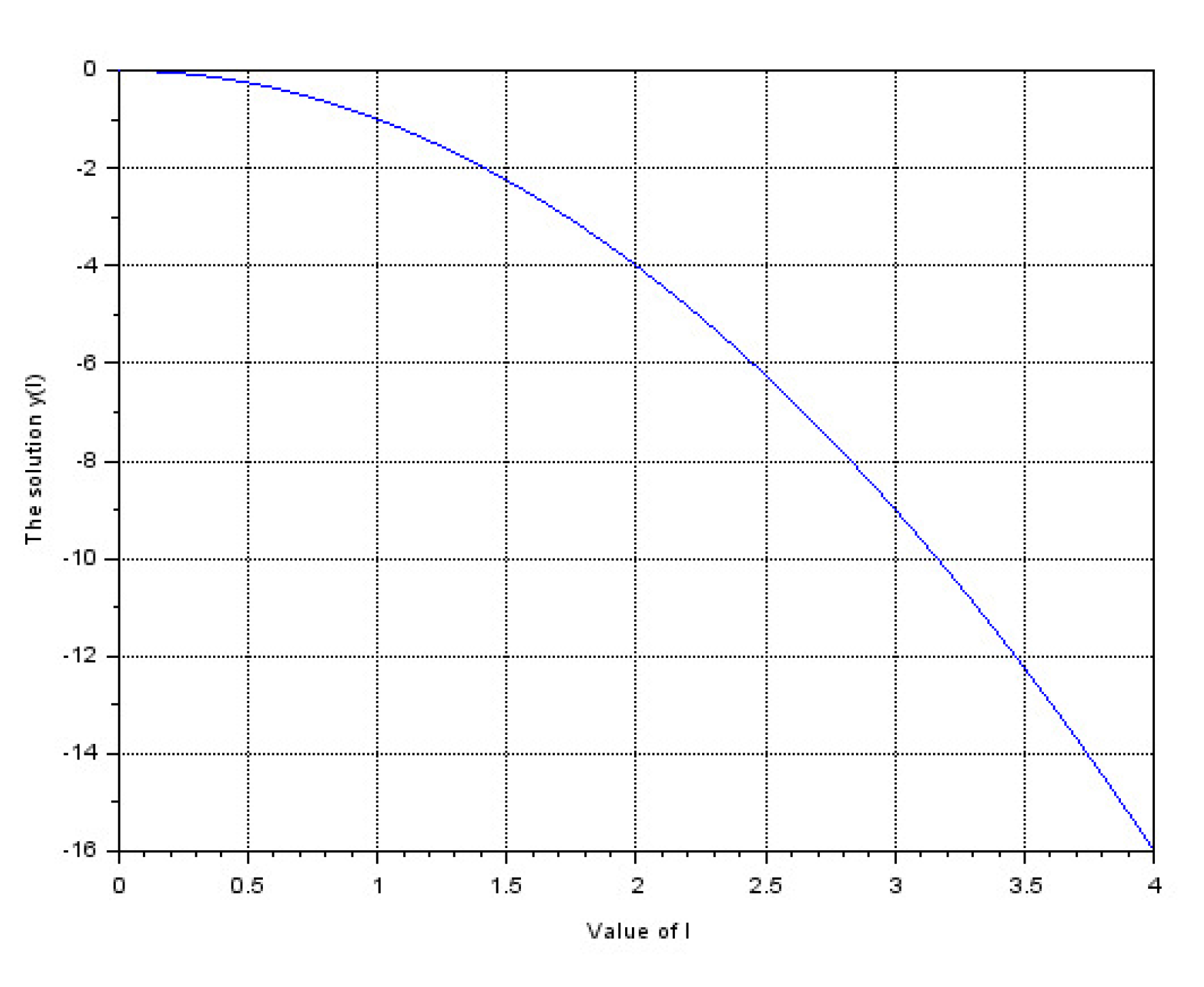
Example 3. Consider the following GPF Riemann-Liouville initial value problem Setting
,
,
,
,
,
and
. The assumption
is satisfied if
. Then,
By setting
and
, it follows that
However, the condition (
22) does not holds since
Using Proposition 1 (ii) with
,
and
, we get
, it is easy to verify that
is a nonoscillatory solution of (
51).
Figure 1 demonstrates the solution
.
6. Conclusions
In this paper, the oscillatory behavior of solutions of generalized proportional fractional initial value problem is studied. Forced and damped oscillation results are obtained via GPF operators in the frame of Riemann-Liouville and Caputo settings. The main theorems of this paper improve and generalize some existing oscillation theorems reported in the literature. In particular, for the choice of
, our contributions obtained using GPF operators cover the results discussed in Reference [
24] which are obtained via conformable operators. At the end, we presented some numerical examples with particular values of parameters to illustrate the validity of the proposed results. Interestingly, we provided an example demonstrating that the failure of any condition forces the existence of a nonoscillatory solution. This justifies the advantage of our findings.
We believe that the results of this paper are of great importance for the audience of interested researchers. Several types of oscillation conditions could be generalized by considering respective equations within GPF derivatives.



{kind=link}
