Linear Model Predictive Control for a Coupled CSTR and Axial Dispersion Tubular Reactor with Recycle



Abstract
1. Introduction
2. Problem Formulation
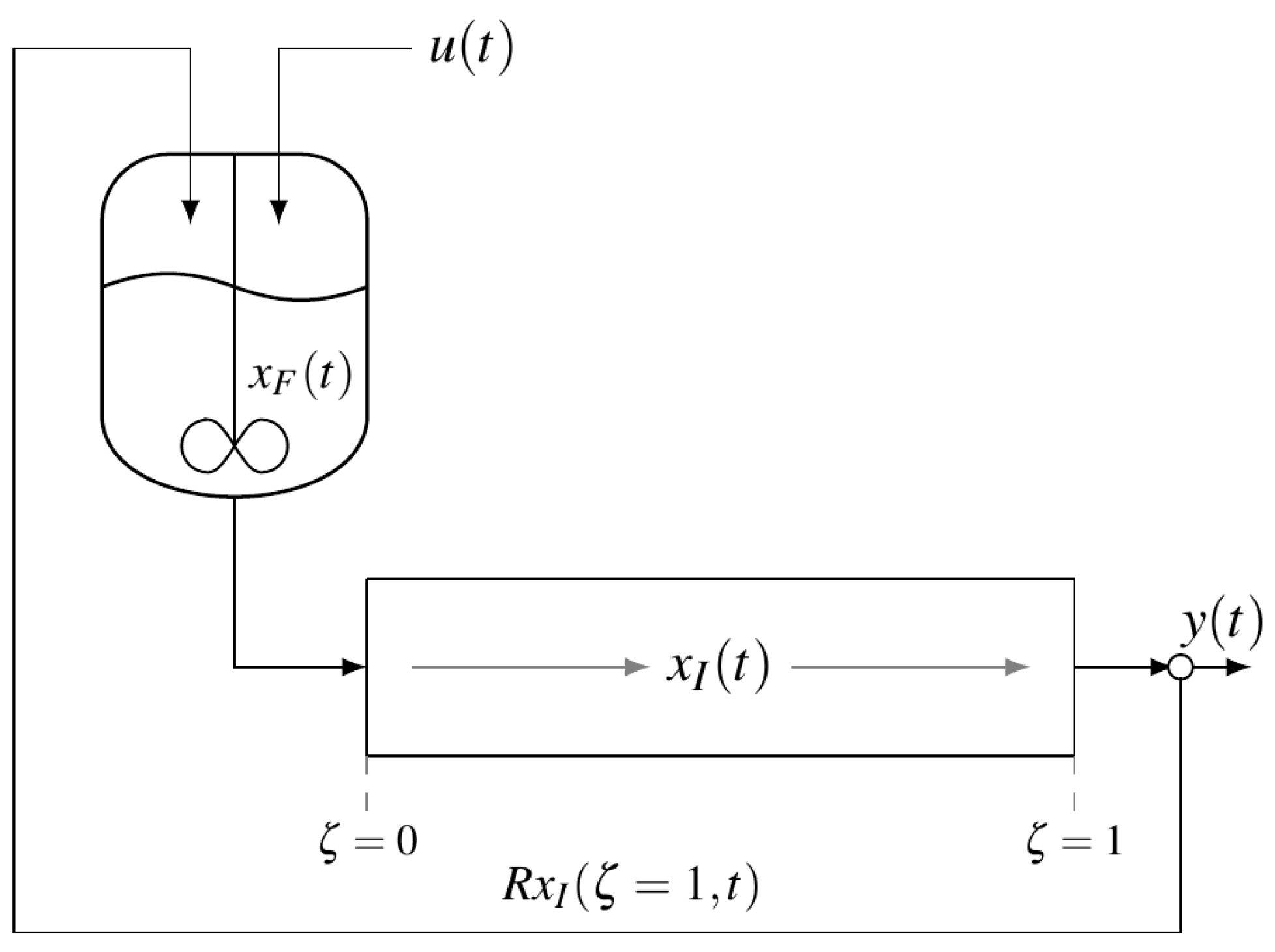
2.1. System Representation
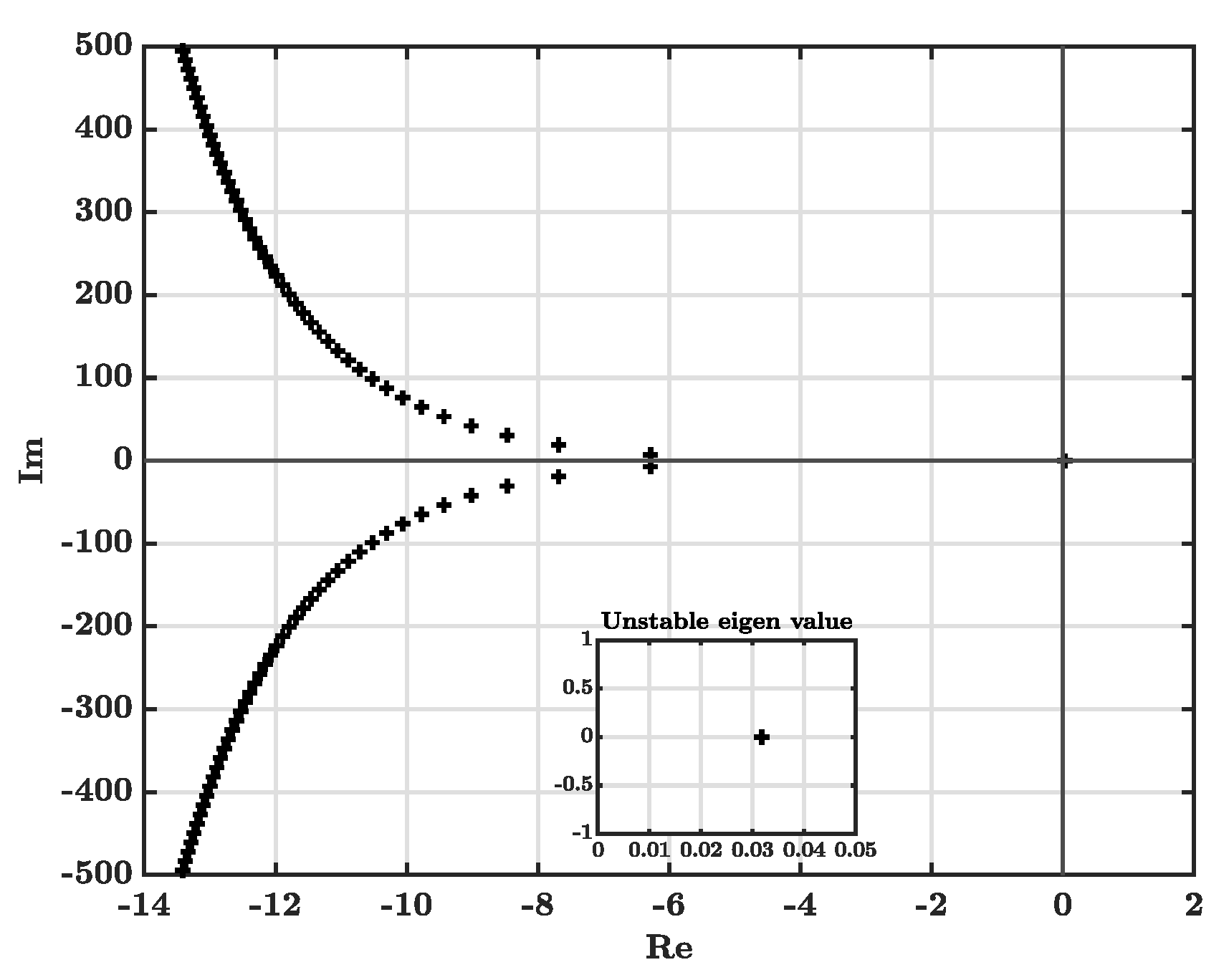
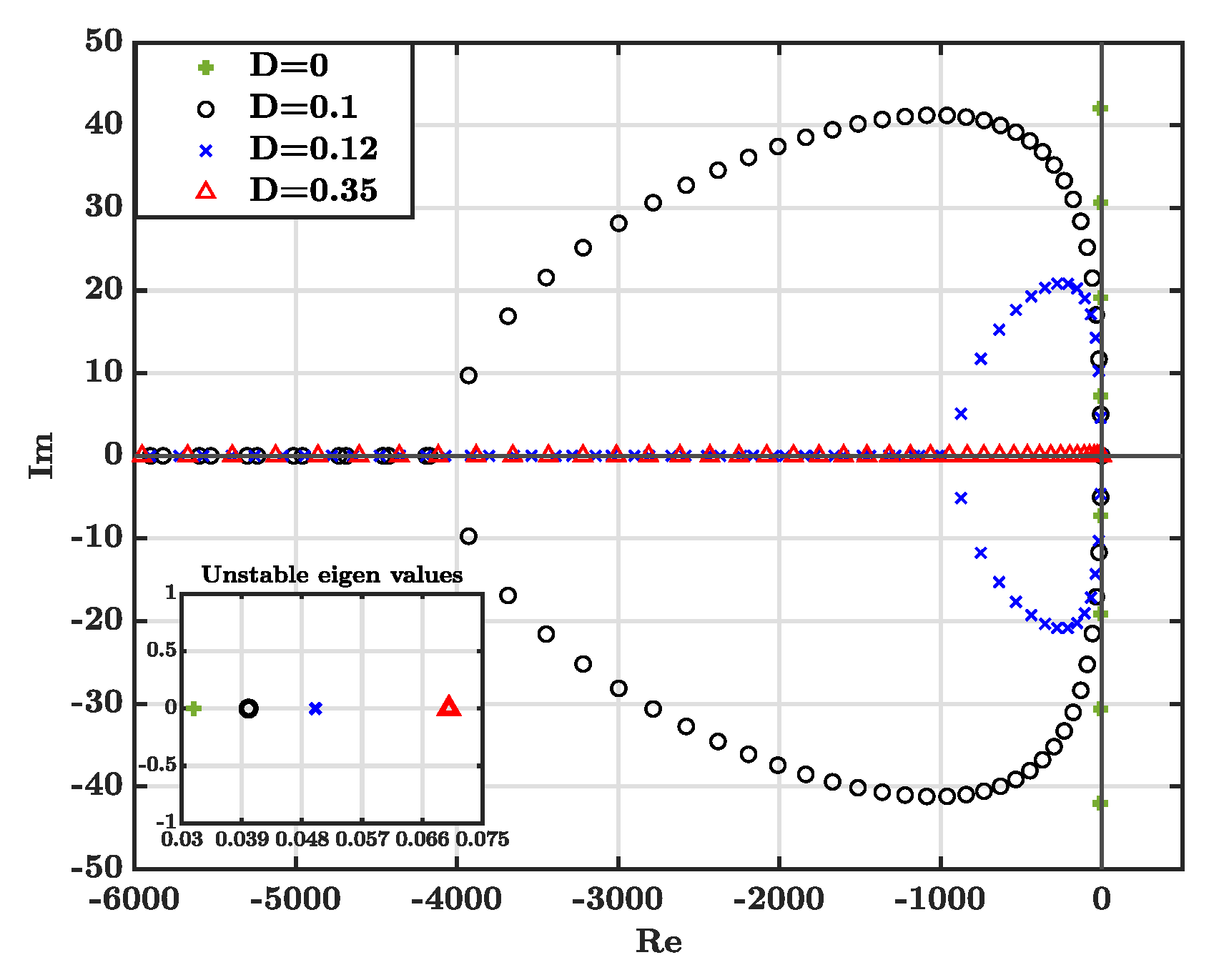
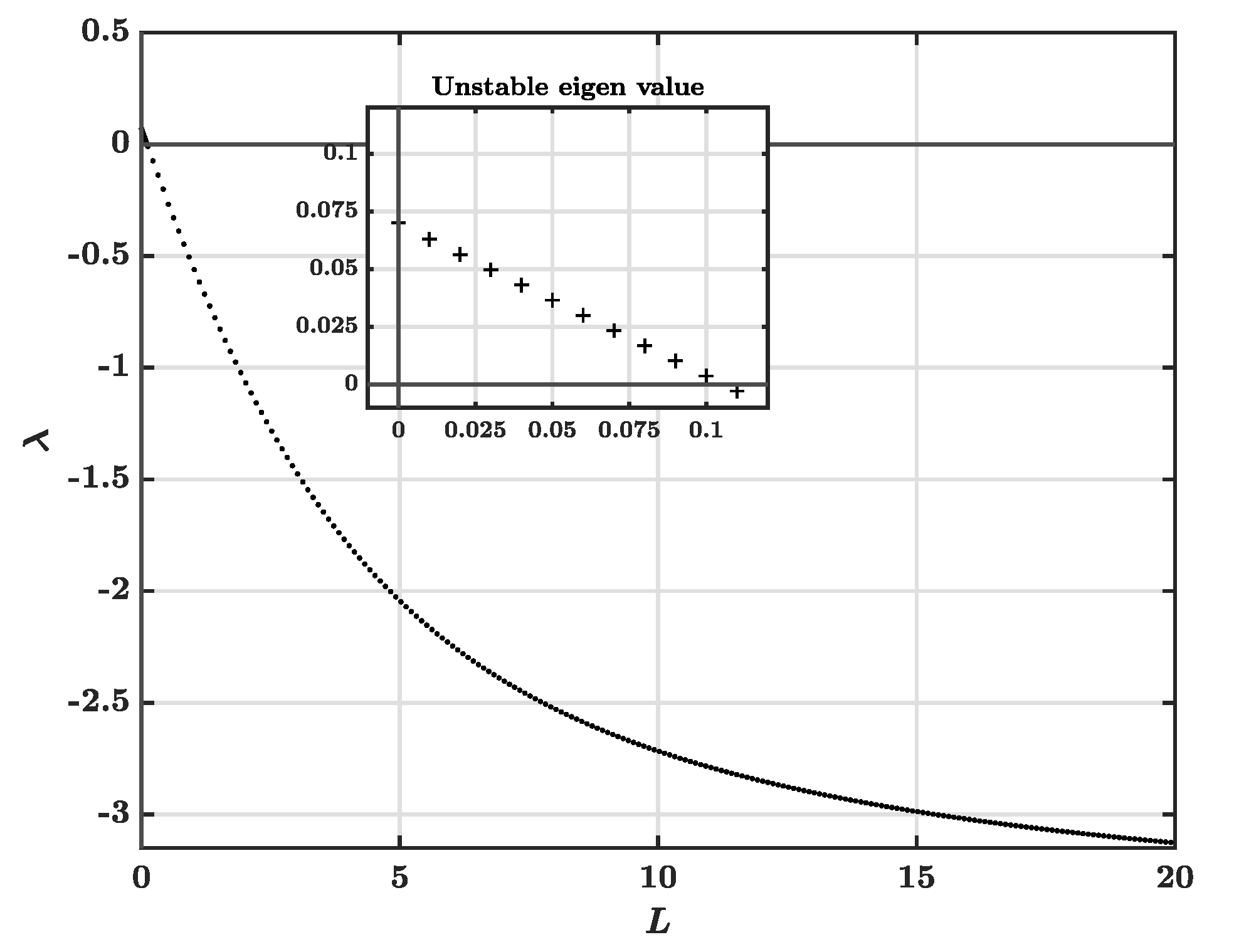
2.2. Open-Loop Stability
3. Discrete Representation
3.1. Discrete Operators
3.2. Discrete Adjoint Operators
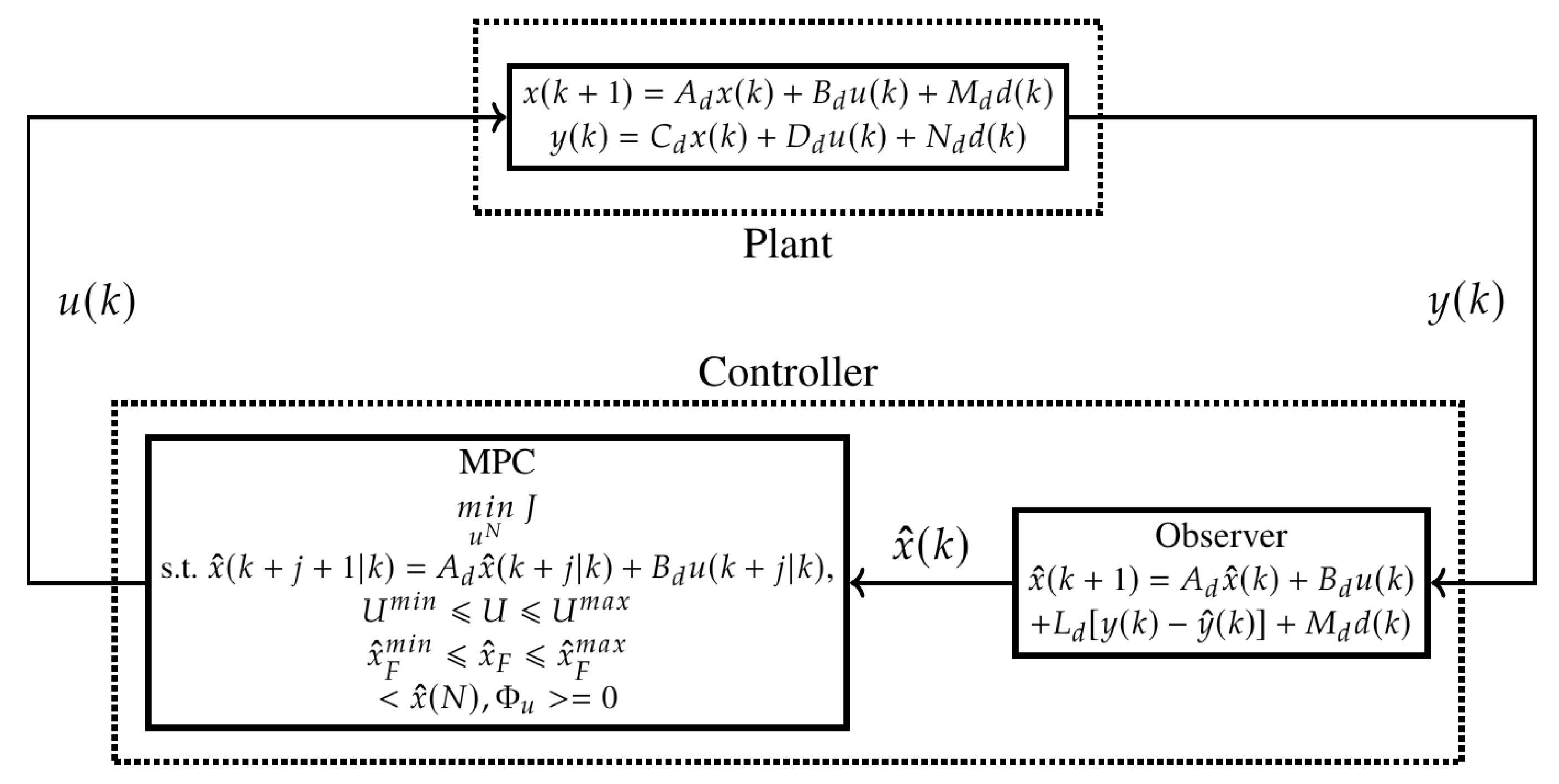
4. Luenberger Observer Design
5. Model Predictive Control for Linear Coupled ODE-PDE System
5.1. Optimization Problem
5.2. Terminal State Penalty Operator
5.3. Stability Constraint
6. Simulation Results
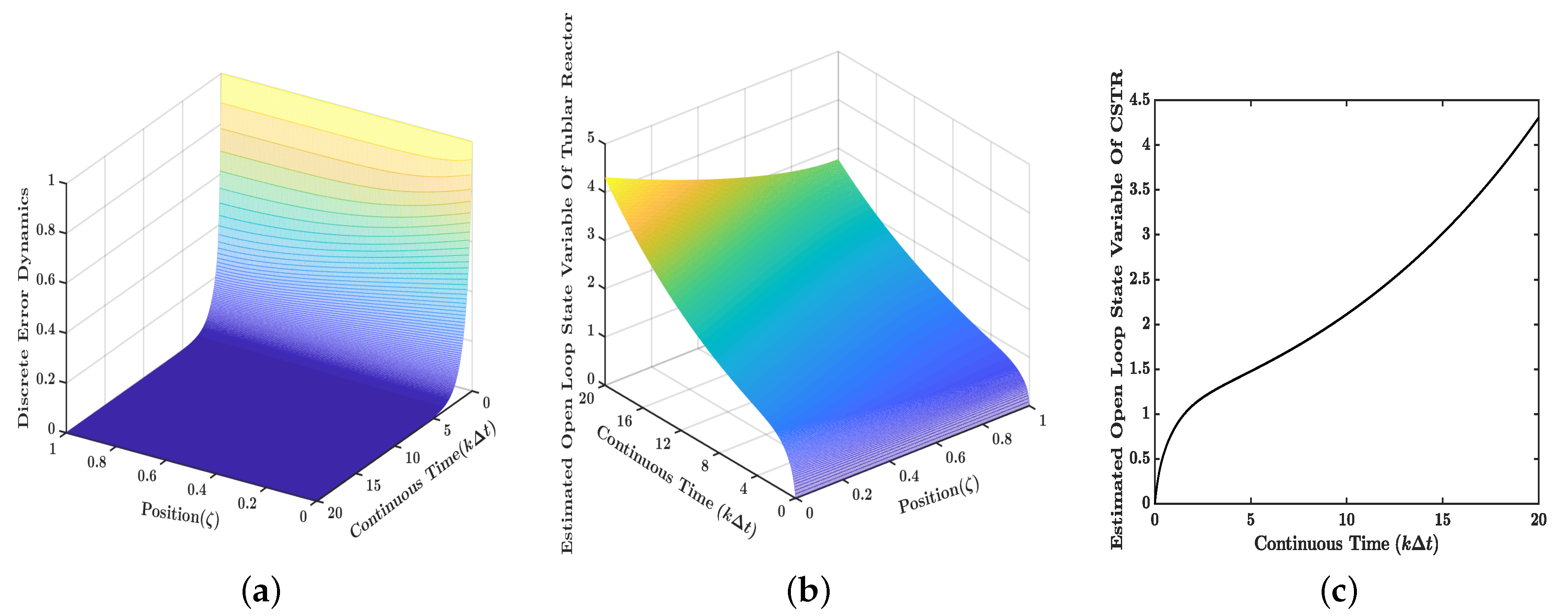
6.1. Observer Design and Open-Loop Response
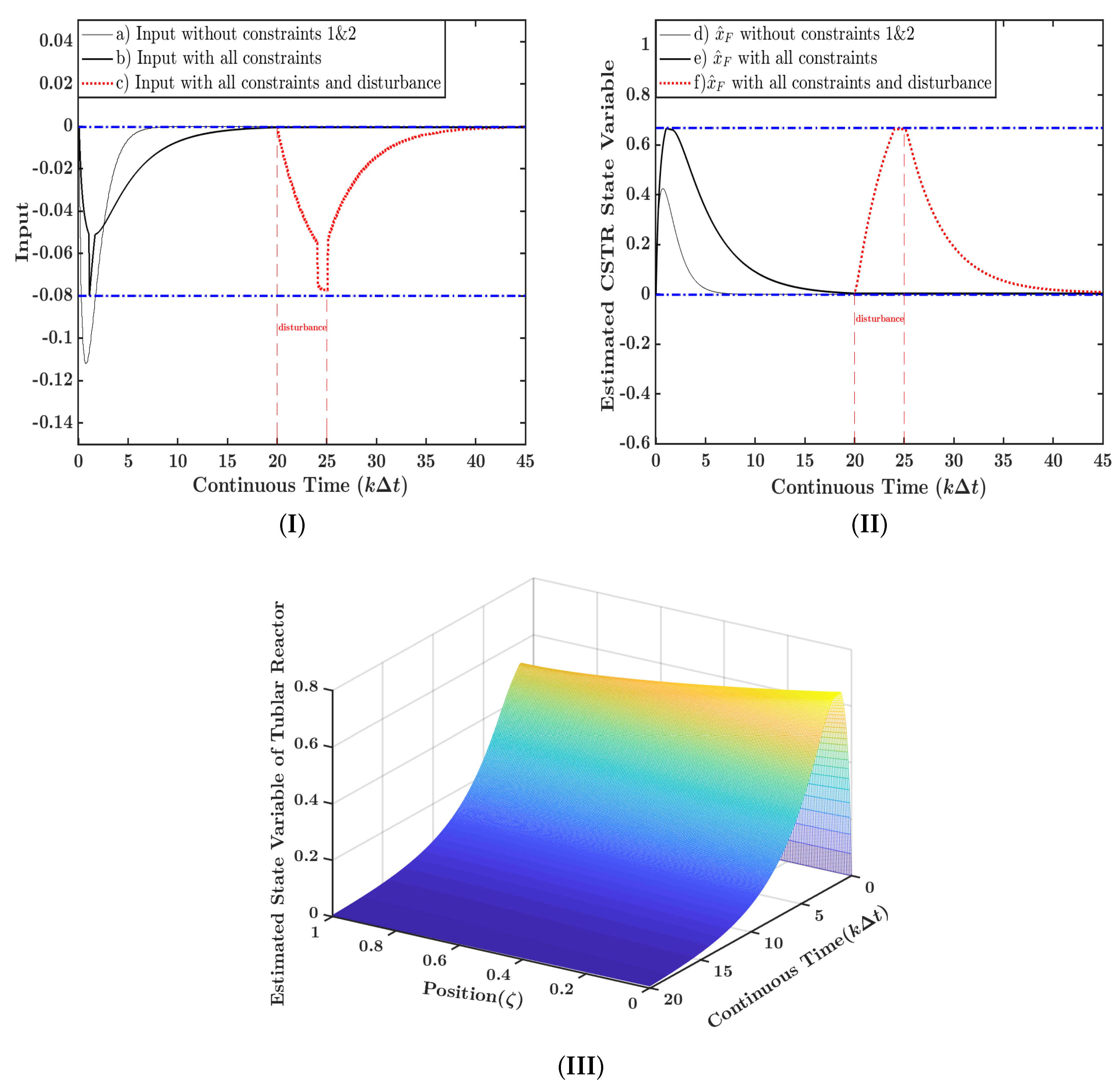
6.2. MPC Implementation
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Ray, W. Advanced Process Control; McGraw-Hill: New York, NY, USA, 1981; p. 1984. [Google Scholar]
- Muske, K.R.; Rawlings, J.B. Model predictive control with linear models. AIChE J. 1993, 39, 262–287. [Google Scholar] [CrossRef]
- Rawlings, J.B. Tutorial overview of model predictive control. IEEE Control Syst. Mag. 2000, 20, 38–52. [Google Scholar]
- Eaton, J.W.; Rawlings, J.B. Model-Predictive Control of Chemical Processes. Chem. Eng. Sci. 1992, 47, 705–720. [Google Scholar] [CrossRef]
- Richalet, J.; Rault, A.; Testud, J.; Papon, J. Model predictive heuristic control: Applications to industrial processes. Automatica 1978, 14, 413–428. [Google Scholar] [CrossRef]
- Shang, H.; Forbes, J.F.; Guay, M. Model Predictive Control for Quasilinear Hyperbolic Distributed Parameter Systems. Ind. Eng. Chem. Res. 2004, 43, 2140–2149. [Google Scholar] [CrossRef]
- Armaou, A.; Christofides, P. Dynamic optimization of dissipative PDE systems using nonlinear order reduction. Chem. Eng. Sci. 2002, 57, 5083–5114. [Google Scholar] [CrossRef]
- Krstic, M.; Smyshlyaev, A. Backstepping boundary control for first-order hyperbolic PDEs and application to systems with actuator and sensor delays. Syst. Control Lett. 2008, 57, 750–758. [Google Scholar] [CrossRef]
- Oh, M.; Pantelides, C. A Modelling and Simulation Language for Combined Lumped and Distributed Parameter Systems. Comput. Chem. Eng. 1996. [Google Scholar] [CrossRef]
- Mohammadi, L.; Aksikas, I.; Dubljevic, S.; Forbes, J.F. Optimal boundary control of coupled parabolic PDE–ODE systems using infinite-dimensional representation. J. Process Control 2015, 33, 102–111. [Google Scholar] [CrossRef]
- Moghadam, A.A.; Aksikas, I.; Dubljevic, S.; Forbes, J.F. Boundary optimal (LQ) control of coupled hyperbolic PDEs and ODEs. Automatica 2013, 49, 526–533. [Google Scholar] [CrossRef]
- Susto, G.A.; Krstic, M. Control of PDE–ODE cascades with Neumann interconnections. J. Frankl. Inst. 2010, 347, 284–314. [Google Scholar] [CrossRef]
- Hasan, A.; Aamo, O.M.; Krstic, M. Boundary observer design for hyperbolic PDE–ODE cascade systems. Automatica 2016, 68, 75–86. [Google Scholar] [CrossRef]
- Tang, S.; Xie, C. State and output feedback boundary control for a coupled PDE–ODE system. Syst. Control Lett. 2011, 60, 540–545. [Google Scholar] [CrossRef]
- Krstic, M.; Smyshlyaev, A. Boundary Control of Pdes: A Course on Backstepping Designs; Society for Industrial and Applied Mathematics: Philadelphia, PA, USA, 2008. [Google Scholar]
- Meglio, F.D.; Argomedo, F.B.; Hu, L.; Krstic, M. Stabilization of coupled linear heterodirectional hyperbolic PDE–ODE systems. Automatica 2018, 87, 281–289. [Google Scholar] [CrossRef]
- Mayne, D.; Rawlings, J.; Rao, C.; Scokaert, P. Constrained model predictive control: Stability and optimality. Automatica 2000, 36, 789–814. [Google Scholar] [CrossRef]
- Chen, H.; Allgöwer, F. Nonlinear Model Predictive Control Schemes with Guaranteed Stability. In Nonlinear Model Based Process Control; Springer Netherlands: Dordrecht, The Netherlands, 1998. [Google Scholar] [CrossRef]
- García, C.E.; Prett, D.M.; Morari, M. Model predictive control: Theory and practice—A survey. Automatica 1989, 25, 335–348. [Google Scholar] [CrossRef]
- Ito, K.; Kunisch, K. Receding horizon optimal control for infinite dimensional systems. ESAIM Control. Optim. Calc. Var. 2002, 8, 741–760. [Google Scholar] [CrossRef]
- Dubljevic, S.; El-Farra, N.H.; Mhaskar, P.; Christofides, P.D. Predictive control of parabolic PDEs with state and control constraints. Int. J. Robust Nonlinear Control 2006, 16, 749–772. [Google Scholar] [CrossRef]
- Liu, L.; Huang, B.; Dubljevic, S. Model predictive control of axial dispersion chemical reactor. J. Process Control 2014, 24, 1671–1690. [Google Scholar] [CrossRef]
- Dubljevic, S.; Christofides, P.D. Predictive control of parabolic PDEs with boundary control actuation. Chem. Eng. Sci. 2006, 61, 6239–6248. [Google Scholar] [CrossRef]
- Bonis, I.; Xie, W.; Theodoropoulos, C. A linear model predictive control algorithm for nonlinear large-scale distributed parameter systems. AIChE J. 2012, 58, 801–811. [Google Scholar] [CrossRef]
- Ai, L.; San, Y. Model Predictive Control for Nonlinear Distributed Parameter Systems based on LS-SVM. Asian J. Control 2013, 15, 1407–1416. [Google Scholar] [CrossRef]
- Kazantzis, N.; Kravaris, C. Energy-predictive control: A new synthesis approach for nonlinear process control. Chem. Eng. Sci. 1999, 54, 1697–1709. [Google Scholar] [CrossRef]
- Åström, K.J.; Wittenmark, B. Computer-Controlled Systems: Theory and Design, 2nd ed.; Prentice-Hall, Inc.: Upper Saddle River, NJ, USA, 1990. [Google Scholar]
- Havu, V.; Malinen, J. The Cayley Transform as a Time Discretization Scheme. Numer. Funct. Anal. Optim. 2007, 28, 825–851. [Google Scholar] [CrossRef]
- Hairer, E.; Lubich, C.; Wanner, G. Geometric Numerical Integration: Structure-Preserving Algorithms for Ordinary Differential Equations, 2nd ed.; Springer: Berlin/Heidelberg, Germany, 2006. [Google Scholar] [CrossRef]
- Mayne, D.Q. Model predictive control: Recent developments and future promise. Automatica 2014, 50, 2967–2986. [Google Scholar] [CrossRef]
- Rawlings, J.; Mayne, D.; Diehl, M. Model Predictive Control: Theory, Computation, and Design; Nob Hill Publishing: Santa Barbara, CA, USA, 2017. [Google Scholar]
- Scokaert, P.O.M.; Mayne, D.Q.; Rawlings, J.B. Suboptimal model predictive control (feasibility implies stability). IEEE Trans. Autom. Control 1999. [Google Scholar] [CrossRef]
- Fogler, H.S. Elements of Chemical Reaction Engineering; Prentice-Hall: Upper Saddle River, NJ, USA, 2005. [Google Scholar]
- Ozorio Cassol, G.; Dubljevic, S. Discrete Output Regulator Design for the linearized Saint-Venant-Exner model. Unpublished work.
- Xu, Q.; Dubljevic, S. Linear Model Predictive Control for Transport-Reaction Processes. AIChE J. 2017, 63. [Google Scholar] [CrossRef]
- Curtain, R.; Zwart, H. An Introduction to Infinite Dimensional Linear Systems Theory; Springer: Berlin, Germany, 1995. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values |
|---|---|
| v | |
| F | 1 |
| D | |
| 1 | |
| R | |
| 0 | |
| 0 | |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Khatibi, S.; Ozorio Cassol, G.; Dubljevic, S. Linear Model Predictive Control for a Coupled CSTR and Axial Dispersion Tubular Reactor with Recycle. Mathematics 2020, 8, 711. https://doi.org/10.3390/math8050711
Khatibi S, Ozorio Cassol G, Dubljevic S. Linear Model Predictive Control for a Coupled CSTR and Axial Dispersion Tubular Reactor with Recycle. Mathematics. 2020; 8(5):711. https://doi.org/10.3390/math8050711
Chicago/Turabian StyleKhatibi, Seyedhamidreza, Guilherme Ozorio Cassol, and Stevan Dubljevic. 2020. "Linear Model Predictive Control for a Coupled CSTR and Axial Dispersion Tubular Reactor with Recycle" Mathematics 8, no. 5: 711. https://doi.org/10.3390/math8050711
APA StyleKhatibi, S., Ozorio Cassol, G., & Dubljevic, S. (2020). Linear Model Predictive Control for a Coupled CSTR and Axial Dispersion Tubular Reactor with Recycle. Mathematics, 8(5), 711. https://doi.org/10.3390/math8050711