Singular Value Thresholding Algorithm for Wireless Sensor Network Localization


Abstract
1. Introduction
2. Background
2.1. Range-Based Localization
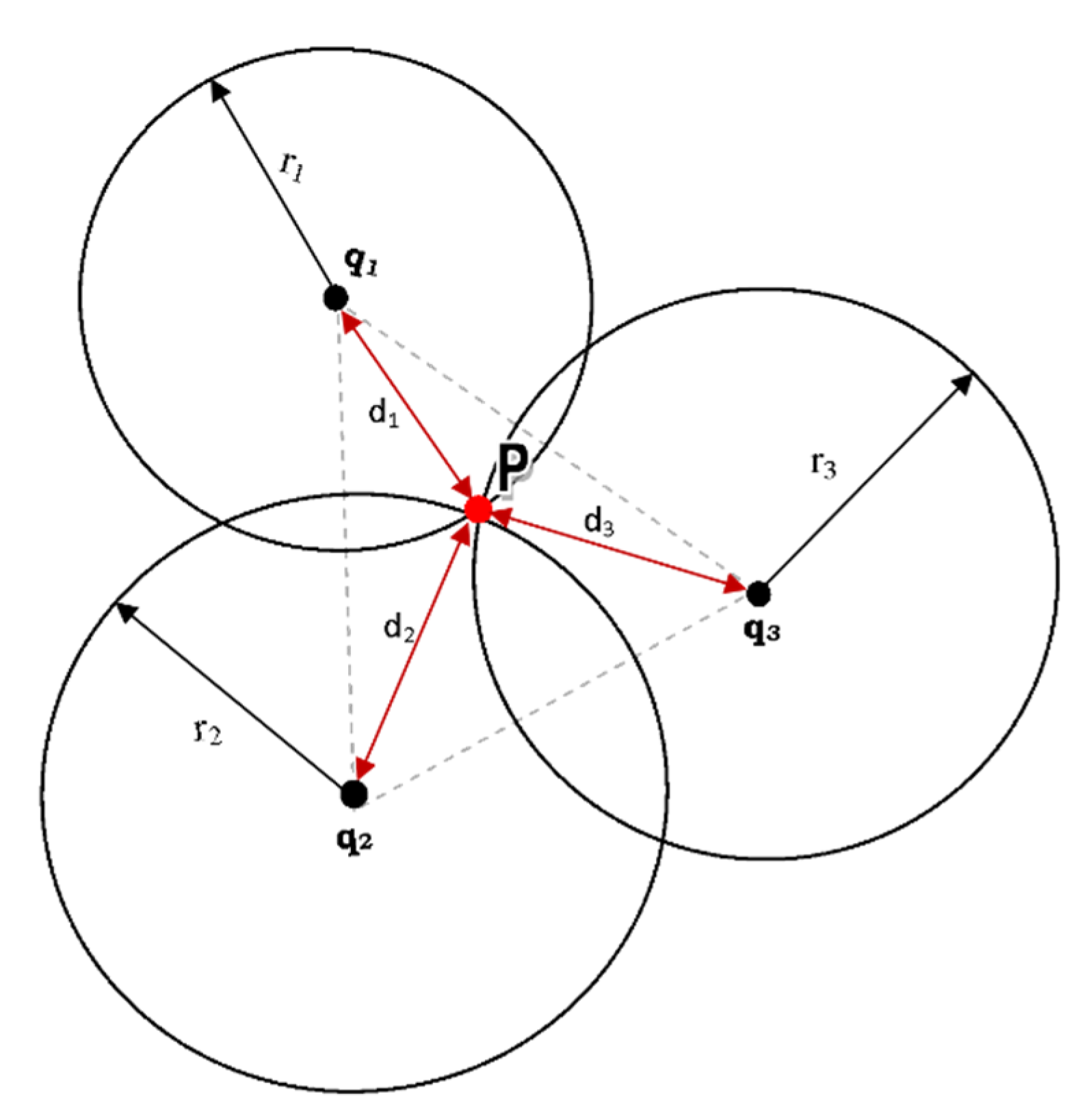
2.2. Trilateration
3. The Singular Value Thresholding Algorithm
4. Simulation
- Calculate the distance between coordinate p and anchor node, . Then, we haveSubtracting the equations, we get a system of three linear equations with three unknowns (the entries of p);
- Solve p by solving .
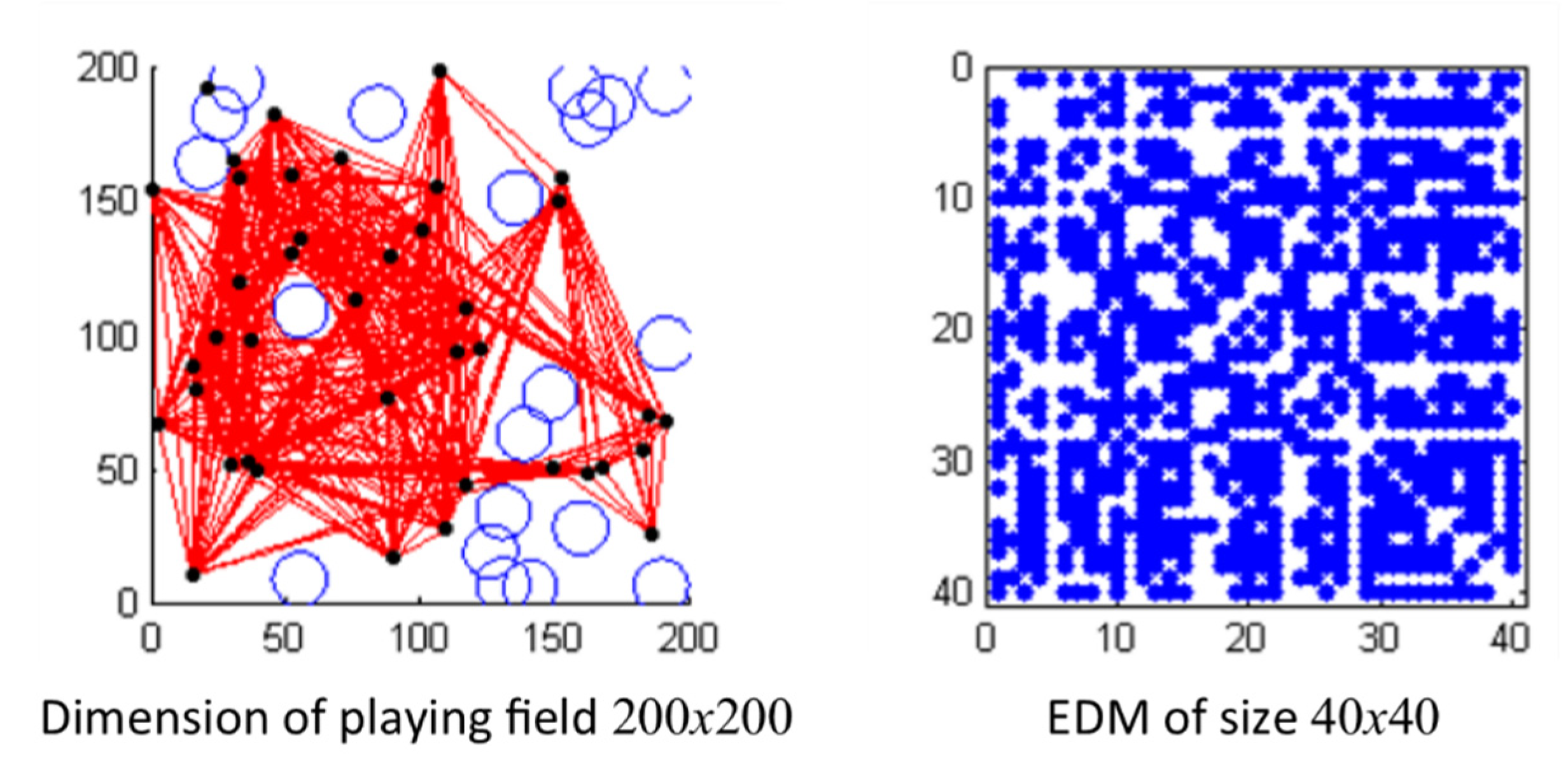
- The results of p are transformed into the Euclidean Distance Matrix (EDM).
4.1. Matrix Completion

4.2. Nuclear Norm Minimization (NNM)
4.2.1. Semidefinite Programming (SDP)
4.2.2. Singular Value Thresholding
5. Results and Discussions
- Next, matrix completion is implemented using Singular Value Thresholding in MATLAB and the results are attached in Appendix 1.
- The complete EDM is now reconstructed via the technique of Trilateration in MATLAB and the results are stated in Table 1.
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Verdone, R.; Dardari, D.; Mazzini, G.; Conti, A. Wireless Sensor and Actuator Networks: Technologies, Analysis and Design; Academic Press: London, UK, 2010. [Google Scholar]
- Jiang, J.-A.; Zheng, X.-Y.; Chen, Y.-F.; Wang, C.-H.; Chen, P.-T.; Chuang, C.-L.; Chen, C.-P. A Distributed RSS-Based Localization Using a Dynamic Circle Expanding Mechanism. IEEE Sens. J. 2013, 13, 3754–3766. [Google Scholar] [CrossRef]
- Tomasi, C.; Kanade, T. Shape and motion from image streams: A factorization method. Proc. Natl. Acad. Sci. USA 2013, 90, 9795–9802. [Google Scholar] [CrossRef]
- Abernethy, J.; Bach, F.; Evgeniou, T.; Vert, J.-P. Low-rank matrix factorization with attributes. arXiv 2006, arXiv:cs/0611124, 1–12. [Google Scholar]
- Mesbahi, M.; Papavassilopoulos, G.P. On the Rank Minimization Problem over a Positive Semidefinite Linear Matrix Inequality. IEEE Trans. Autom. Control 1997, 42, 239–243. [Google Scholar] [CrossRef]
- Chaurasiya, V.K.; Jain, N.; Nandi, G. A novel distance estimation approach for 3D localization in wireless sensor network using multi dimensional scaling. Inf. Fusion 2014, 15, 5–18. [Google Scholar] [CrossRef]
- Brida, P.; Machaj, J. A Novel Enhanced Positioning Trilateration Algorithm Implemented for Medical Implant In-Body Localization. Int. J. Antennas Propag. 2013, 2013, 1–10. [Google Scholar] [CrossRef]
- Thomas, F.; Ros, L. Revisiting trilateration for robot localization. IEEE Trans. Robot. 2005, 21, 93–101. [Google Scholar] [CrossRef]
- Patil, S.; Zaveri, M. MDS and Trilateration Based Localization in Wireless Sensor Network. Wirel. Sens. Netw. 2011, 3, 198–208. [Google Scholar] [CrossRef][Green Version]
- Smith, R.S. Frequency Domain Subspace Identification Using Nuclear Norm Minimization and Hankel Matrix Realizations. IEEE Trans. Autom. Control 2014, 59, 2886–2896. [Google Scholar] [CrossRef]
- Zhang, L.; Yang, T.; Jin, R. Analysis of Nuclear Norm Regularization for Full-rank Matrix Completion. arXiv 2009, arXiv:1504.06817 [cs.LG]. Available online: https://arxiv.org/abs/1504.06817v1 (accessed on 20 November 2019).
- Blomberg, N.; Rojas, C.R.; Wahlberg, B. Approximate Regularization Paths for Nuclear Norm Minimization Using Singular Value Bounds—With Implementation and Extended Appendix. arXiv 2015, arXiv:1504.05208 [cs.SY]. Available online: https://arxiv.org/abs/1504.05208v1 (accessed on 25 November 2019).
- Mardani, M.; Mateos, G.; Giannakis, G.B. Distributed nuclear norm minimization for matrix completion. In Proceedings of the 2012 IEEE 13th International Workshop on Signal Processing Advances in Wireless Communications (SPAWC), Cesme, Turkey, 17–20 June 2012; pp. 354–358. [Google Scholar] [CrossRef]
- Cai, J.-F.; Candés, E.J.; Shen, Z. A Singular Value Thresholding Algorithm for Matrix Completion. SIAM J. Optim. 2010, 20, 1956–1982. [Google Scholar] [CrossRef]
- Oh, T.H.; Matsushita, Y.; Tai, Y.W.; Kweon, I.S. Fast randomized singular value thresholding for low-rank optimization. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 40, 376–391. [Google Scholar] [CrossRef] [PubMed]
- Nguyen, L.T.; Kim, J.; Kim, S.; Shim, B. Localization of iot networks via low-rank matrix completion. IEEE Trans. Commun. 2019, 67, 5833–5847. [Google Scholar] [CrossRef]
- Feng, C.; Valaee, S.; Sy, W.; Au, A.; Tan, Z. Localization of Wireless Sensors via Nuclear Norm for Rank Minimization. In Proceedings of the 2010 IEEE Global Telecommunications Conference GLOBECOM 2010, Miami, FL, USA, 6–10 December 2010; pp. 1–5. [Google Scholar] [CrossRef]
- Candes, E.J.; Recht, B. Exact Matrix Completion via Convex Optimization. Found. Comp. Math 2009, 9, 1–49. [Google Scholar] [CrossRef]
- Varga, A.K. Localization Techniques in Wireless Sensor Networks. Prod. Syst. Inf. Eng. 2013, 6, 81–90. [Google Scholar]
- Liu, B.-C.; Lin, K.-H. Accuracy Improvement of SSSD Circular Positioning in Cellular Networks. IEEE Trans. Veh. Technol. 2011, 60, 1766–1774. [Google Scholar] [CrossRef]
- Eren, T.; Goldenberg, O.K.; Whiteley, W.; Yang, Y.R.; Morse, A.S.; Anderson, B.D.O.; Belhumeur, P.N. Rigidity, computation, and randomization in network localization. In Proceedings of the IEEE INFOCOM, Hong Kong, China, 7–11 March 2014; Volume 4, pp. 2673–2684. [Google Scholar] [CrossRef]
- Sharma, G.; Kumar, A. Improved range-free localization for three-dimensional wireless sensor networks using genetic algorithm. Comput. Electr. Eng. 2018, 72, 808–827. [Google Scholar] [CrossRef]
- Zhou, C.; Yang, Y.; Wang, Y. DV-Hop localization algorithm based on bacterial foraging optimization for wireless multimedia sensor networks. Multimed. Tools Appl. 2019, 78, 4299–4309. [Google Scholar] [CrossRef]
- Yan, X.; Luo, Q.; Yang, Y.; Liu, S.; Li, H.; Hu, C. ITL-MEPOSA: Improved Trilateration Localization with Minimum Uncertainty Propagation and Optimized Selection of Anchor Nodes for Wireless Sensor Networks. IEEE Access 2019, 7, 53136–53146. [Google Scholar] [CrossRef]
- Manickam, M.; Selvaraj, S. Range-based localisation of a wireless sensor network using Jaya algorithm. IET Sci. Meas. Technol. 2019, 13, 937–943. [Google Scholar] [CrossRef]
- Zhao, Y.; Xu, J.; Jiang, J. RSSI based localization with mobile anchor for wireless sensor networks. In Proceedings of the 2017 International Conference on Geo-Spatial Knowledge and Intelligence, Chiang Mai, Thailand, 8–10 December 2018; pp. 176–187. [Google Scholar] [CrossRef]
- Zhang, L.; Yang, Z.; Zhang, S.; Yang, H. Three-Dimensional Localization Algorithm of WSN Nodes Based on RSSI-TOA and Single Mobile Anchor Node. J. Electr. Comput. Eng. 2019. [Google Scholar] [CrossRef]
- Heurtefeux, K.; Valois, F. Is RSSI a Good Choice for Localization in Wireless Sensor Network? In Proceedings of the 2012 IEEE 26th International Conference on Advanced Information Networking and Applications, Fukuoka, Japan, 26–29 March 2012; pp. 732–739. [Google Scholar] [CrossRef]
- Yang, Z.; Liu, Y.; Li, X.-Y. Beyond Trilateration: On the Localizability of Wireless Ad Hoc Networks. IEEE/ACM Trans. Netw. 2010, 18, 1806–1814. [Google Scholar] [CrossRef]
- Fazel, M. Matrix Rank Minimization with Applications. Ph.D. Thesis, Stanford University, Stanford, CA, USA, 2002. [Google Scholar]
- Mao, G.; Fidan, B.; Anderson, B.D. Wireless sensor network localization techniques. Comput. Netw. 2007, 51, 2529–2553. [Google Scholar] [CrossRef]
- Fazel, M.; Hindi, H.; Boyd, S. A rank minimization heuristic with application to minimum order system approximation. In Proceedings of the 2001 American Control Conference. (Cat. No.01CH37148), Arlington, VA, USA, 25–27 June 2001; Volume 6, pp. 4734–4739. [Google Scholar] [CrossRef]
- Recht, B.; Xu, W.; Hassibi, B. Necessary and sufficient conditions for success of the nuclear norm heuristic for rank minimization. In Proceedings of the 2008 47th IEEE Conference on Decision and Control, Cancun, Mexico, 9–11 December 2008; pp. 3065–3070. [Google Scholar] [CrossRef]
- Najib, Y.N.A. Matrix Completion. Master’s Thesis, University of Manchester, Manchester, UK, 2013. [Google Scholar]
- Michael, G.; Stephen, B. CVX: Matlab Software for Disciplined Convex Programming; Version 2.0 Beta. Available online: http://cvxr.com/cvx (accessed on 20 November 2019).




{kind=link}
{kind=link}
{kind=link}
| Nu. of Sensor Node | Percentage of Missing Entries (%) | Relative Error on EDM | Relative Recovery Error | Processing Time (s) |
|---|---|---|---|---|
| 10 | 20 | 4.89 × 10−5 | 4.31 × 10−1 | 0.04872 |
| 20 | 25 | 6.21 × 10−4 | 5.23 × 10−1 | 0.08231 |
| 50 | 40 | 6.89 × 10−4 | 5.65 × 10−1 | 1.14435 |
| 100 | 60 | 5.23 × 104 | 3.57 × 105 | 2.23154 |
| 200 | 80 | 4.23 × 104 | 5.38 × 107 | 6.5134 |
| Nu. of Sensor Node | Nu. of Iteration | Percentage of Missing Entries (%) | Relative Error on EDM | Relative Recovery Error | Processing Time (s) |
|---|---|---|---|---|---|
| 10 | 17 | 26 | 5.64 × 10−5 | 6.26 × 10−1 | 0.036282 |
| 20 | 11 | 24 | 5.27 × 10−5 | 6.51 × 10−1 | 0.039764 |
| 50 | 9 | 22.4 | 3.82 × 10−5 | 6.24 × 10−1 | 0.081020 |
| 100 | 7 | 18.1 | 4.85 × 10−5 | 5.59 × 10−1 | 0.637559 |
| 200 | 7 | 19.1 | 5.77 × 10−5 | 5.27 × 10−1 | 2.720775 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ahmad Najib, Y.N.; Daud, H.; Abd Aziz, A. Singular Value Thresholding Algorithm for Wireless Sensor Network Localization. Mathematics 2020, 8, 437. https://doi.org/10.3390/math8030437
Ahmad Najib YN, Daud H, Abd Aziz A. Singular Value Thresholding Algorithm for Wireless Sensor Network Localization. Mathematics. 2020; 8(3):437. https://doi.org/10.3390/math8030437
Chicago/Turabian StyleAhmad Najib, Yasmeen Nadhirah, Hanita Daud, and Azrina Abd Aziz. 2020. "Singular Value Thresholding Algorithm for Wireless Sensor Network Localization" Mathematics 8, no. 3: 437. https://doi.org/10.3390/math8030437
APA StyleAhmad Najib, Y. N., Daud, H., & Abd Aziz, A. (2020). Singular Value Thresholding Algorithm for Wireless Sensor Network Localization. Mathematics, 8(3), 437. https://doi.org/10.3390/math8030437