All articles published by MDPI are made immediately available worldwide under an open access license. No special
permission is required to reuse all or part of the article published by MDPI, including figures and tables. For
articles published under an open access Creative Common CC BY license, any part of the article may be reused without
permission provided that the original article is clearly cited. For more information, please refer to
https://www.mdpi.com/openaccess.
Feature papers represent the most advanced research with significant potential for high impact in the field. A Feature
Paper should be a substantial original Article that involves several techniques or approaches, provides an outlook for
future research directions and describes possible research applications.
Feature papers are submitted upon individual invitation or recommendation by the scientific editors and must receive
positive feedback from the reviewers.
Editor’s Choice articles are based on recommendations by the scientific editors of MDPI journals from around the world.
Editors select a small number of articles recently published in the journal that they believe will be particularly
interesting to readers, or important in the respective research area. The aim is to provide a snapshot of some of the
most exciting work published in the various research areas of the journal.
This paper extends the former approaches to describe the stability of n-dimensional linear time-invariant systems via the torsion of the state trajectory. For a system where A is invertible, we show that (1) if there exists a measurable set with positive Lebesgue measure, such that implies that or does not exist, then the zero solution of the system is stable; (2) if there exists a measurable set with positive Lebesgue measure, such that implies that , then the zero solution of the system is asymptotically stable. Furthermore, we establish a relationship between the ith curvature of the trajectory and the stability of the zero solution when A is similar to a real diagonal matrix.
It is well known that Lyapunov [1] laid the foundation of stability theory. Linear systems are the most basic and widely used research objects, which have been developed for a long period. However, the traditional methods rely heavily on linear algebra. There are few results obtained from geometric aspects.
Curvature and torsion are important concepts in differential geometry. In [2], the authors calculated the curvature and torsion of the state trajectories of the two- and three-dimensional linear time-invariant systems , which are related to the system stability. Furthermore, in [3] the authors use the definition of higher curvatures of curves in given in [4] to obtain the relationship between the first curvature of the state trajectory and the stability of the n-dimensional linear system.
In this paper, we will describe the stability of the zero solutions of linear time-invariant systems in arbitrary dimension by using the torsion, namely, the second curvature.
Our main results are as follows.
Theorem1.
Suppose that is a linear time-invariant system, where A is similar to an real diagonal matrix, , and is the derivative of . Denote by the ith curvature of trajectory of a solution . We have
if there exists a measurable set whose Lebesgue measure is greater than 0, such that implies that or does not exist, then the zero solution of the system is stable;
if A is invertible, then under the assumptions of , the zero solution of the system is asymptotically stable.
Theorem2.
Suppose that is a linear time-invariant system, where A is an invertible real matrix, and . Denote by the torsion of trajectory of a solution . We have
if there exists a measurable set whose Lebesgue measure is greater than 0, such that implies that or does not exist, then the zero solution of the system is stable;
if there exists a measurable set whose Lebesgue measure is greater than 0, such that implies that , then the zero solution of the system is asymptotically stable.
The paper is organized as follows. In Section 2, we review some basic concepts and propositions. In Section 3, we study the relationship between the ith curvature of the trajectory and the stability of the zero solution of the system when the system matrix is similar to a real diagonal matrix, and we prove Theorem 1. In Section 4, we establish a relationship between the torsion of the trajectory and the stability of the zero solution of the system, and complete the proof of Theorem 2. Two examples are given in Section 5. Finally, Section 6 concludes the paper.
2. Preliminaries
Throughout this paper, all vectors will be written as column vectors, and will denote the Euclidean norm of , namely, . The vector denotes the ith derivative of vector . We denote by the determinant of matrix A. The eigenvalues of matrix A are denoted by , and the set of eigenvalues of matrix A is denoted by . The degree of polynomial is denoted by .
2.1. Stability of Linear Time-Invariant Systems
Definition1
([5]).The system of ordinary differential equations
is called a linear time-invariant system, where A is an real constant matrix, , and is the derivative of .
The curve is called the trajectory of the system (2) with the initial value .
Definition2
([6,7]).The solution of differential equations (1) is called the zero solution of the linear time-invariant system. If for every constant , there exists a , such that implies that for all , where is a solution of (1), then we say that the zero solution of system (1) is stable. If the zero solution is not stable, then we say that it is unstable.
Suppose that the zero solution of system (1) is stable, and there exists a , such that implies that , then we say that the zero solution of system (1) is asymptotically stable.
Proposition2
([6]).The zero solution of system (1) is stable if and only if all eigenvalues of matrix A have nonpositive real parts and those eigenvalues with zero real parts are simple roots of the minimal polynomial of A.
The zero solution of system (1) is asymptotically stable if and only if all eigenvalues of matrix A have negative real parts, namely, .
Proposition3
([6]).Suppose that A and B are two real matrices, and A is similar to B, namely, there exists an real invertible matrix P, such that . For system (1), let . Then the system after the transformation becomes
System (4) is said to be equivalent to system (1), and is called an equivalence transformation.
Proposition4
([6]).Let A and B be two real matrices, and A is similar to B. Then the zero solution of the system is (asymptotically) stable if and only if the zero solution of the system is (asymptotically) stable.
are called the curvature and torsion of the curve , respectively.
Gluck [4] gave a definition of higher curvatures of curves in , which is a generalization of curvature and torsion. Here we omit the definition of higher curvatures and review their calculation formulas directly.
In this paper, denotes the i-dimensional volume of the i-dimensional parallelotope with vectors , , ⋯, as edges, and we have a convention that .
Proposition5
([4]).Let be a smooth curve, and for all . Suppose that for each , the vectors are linearly independent. Then the ith curvature of a curve is
In [4], according to the definition of the curvatures of curves in , we have for .
If is a smooth curve in , and are linearly independent, then we have Frenet-Serret formulas (cf. [8]), where , and , which means the first and second curvature are the generalization of curvature and torsion of curves in , respectively. In the remainder of this paper, we use instead of , and instead of , for simplicity.
We can give by the derivatives of with respect to t. In fact, we have the following result.
By Proposition 5 and Proposition 6, we obtain the expression of each curvature of curve in by the coordinates of derivatives of . In particular, if and are linearly independent, then the torsion of satisfies
On the other hand, if , namely and are linearly dependent for all t, then obviously we have the convention that . Further, the function will be examined in detail in Section 4.2.
2.3. Relationship Between the Curvatures of Two Equivalent Systems
Wang et al. [3] establish a relationship between the curvatures of the trajectories of two equivalent systems. In fact, let a curve be the trajectory of system (2), and suppose that for each t, the vectors are linearly independent. Then we can define curvatures of the curve , and we have the following result.
Proposition7
([3]).Suppose that a linear time-invariant system is equivalent to a system , where , and is the equivalence transformation. Let and be the ith curvatures of trajectories and , respectively. Then we have
2.4. Real Jordan Canonical Form
Proposition8
([7,9]).Let A be an real matrix. Then A is similar to a block diagonal real matrix
where
for , the numbers and are complex eigenvalues of A, and
where
for , the number is a real eigenvalue of A, and
The matrix (6) is called the real Jordan canonical form of A.
3. Real Diagonal Matrix
In this section, we study the case that the system matrix is similar to a real diagonal matrix, and prove Theorem 1. From Proposition 4 and Proposition 7, we only need to focus on the case that A is a real diagonal matrix, and prove Proposition 9.
In what follows, we defind a subset of that
Proposition9.
Suppose that is a linear time-invariant system, where A is an real diagonal matrix, and . Denote by the ith curvature of trajectory of a solution . Then for any given initial value , we have
if or does not exist, then the zero solution of the system is stable;
if A is invertible, and or does not exist, then the zero solution of the system is asymptotically stable.
Wang et al. [3] has proved the case of . Now we give a complete proof of this proposition.
Proof.
Suppose that A is an real diagonal matrix, namely,
Then
where . Hence we have
namely, the coordinates of derivatives of are
Then by Proposition 6, we obtain
We see that if the eigenvalues of A are non-zero and distinct, then a term of the form will appear in the expression of , where C is a constant depending on the eigenvalues and initial value, and .
By Proposition 5, the square of the ith curvature is
Now, we consider the limit of as by comparing the exponents of in the numerator and denominator of . Let and denote the maximum values of in the terms of the form in and , respectively. We define
where C is a positive constant depending on the initial value for . Here we notice that for any given real diagonal matrix A, if for a given initial value that satisfies , we have (or , or a constant , respectively), then for an arbitrary satisfying , we still have (or , or a constant , respectively).
Noting that A is a real diagonal matrix, by Proposition 2, the zero solution of the system (1) is stable if and only if . If the zero solution of the system is unstable, then we have , thus . By (9), we have . In other words, if or does not exist, then the zero solution of the system is stable.
Suppose that A is invertible, and or does not exist. Then 0 is not an eigenvalue of A, and the zero solution of the system is stable. By Proposition 2, the zero solution of the system is asymptotically stable. □
Now, we proceed to the proof of Theorem 1.
Proof ofTheorem 1.
Suppose that the linear time-invariant system is equivalent to a system , where B is a real diagonal matrix, , and is the equivalence transformation. They by Proposition 7, we have
We define
Note that we can regard any given invertible matrix P as an invertible linear transformation , and the Lebesgue measure of satisfies
If there exists a measurable set whose Lebesgue measure is greater than 0, such that implies that or does not exist, then by (10) and (11), there exists a , such that the trajectory with initial value satisfies or does not exist. Notice that when , the vector satisfies , thus by Proposition 9, the zero solution of the system is stable, and then by Proposition 4, the zero solution of the system is also stable, which proves Theorem 1 (1).
Since A is similar to B, the matrix A is invertible if and only if B is invertible. The method of the proof of (1) works for (2), which completes the proof of Theorem 1. □
4. Relationship between Torsion and Stability
In this section, we give the proof of Theorem 2, which establishes a relationship between the torsion of the trajectory and the stability of the zero solution of the system. From Proposition 4, 7, and 8, we only need to focus on the case that A is an invertible matrix in real Jordan canonical form (6), and prove the following result.
Proposition10.
Suppose that is a linear time-invariant system, where A is an invertible matrix in real Jordan canonical form, and . Denote by the torsion of trajectory of a solution . Then for any given initial value , we have
if or does not exist, then the zero solution of the system is stable;
if , then the zero solution of the system is asymptotically stable.
4.1. Blocks and
In order to study the matrices in real Jordan canonical form (6), we first consider the blocks of the forms
where , , and . Part of this subsection goes back to the work as far as [3].
For a block, by direct calculation, we obtain
and we have the exponential function
For the system , by substituting (14) into , we obtain the expressions of the coordinates of
where the polynomial
Substituting (12) and (13) into for , combined with (15), we see that the coordinates of the derivatives of are
where we have a convention that for .
We see that if , then ; if , then .
For a block, a direct calculation gives
where , and ; and we have the exponential function
where .
For the system , write
Substituting (19) into , we obtain the expressions of the coordinates of
Substituting (12) and (18) into for , combined with (20), we see that the coordinates of the derivatives of are
where we have a convention that if , then .
It should be noted that in the following subsections we will consider the case where A has more than one block of the form or , so when , and appear in the following, the in (16) should be understood as the coordinate of which corresponds to the th row of the diagonal block corresponding to the , and the and in (21) should be understood as the coordinates of which correspond to the th and th row of the diagonal block corresponding to the and , respectively.
4.2. Function
By Proposition 6, we have
Considering the form of the expression of torsion , it is necessary to make a detailed analysis of the function .
Lemma1.
Suppose that is a linear time-invariant system, where A is an matrix in real Jordan canonical form, and . The function is given by (24). Then for any given , we have
if and only if
where ;
if , then there exists a , such that for all .
Proof.
Suppose A is an matrix in real Jordan canonical form.
(a) If A has a diagonal block (without loss of generality, we assume that this block is the first diagonal block of A), then by (20), (22), (23), and the analysis of Section of [3], we have
where the constant and are bounded functions. It follows that there exists a , such that for all .
(b) If A has a diagonal block , where or then by (15), (17), and the analysis of Section of [3], we have
where is a polynomial, and
(b1) if , then
(b2) if and , then .
We see that for both (b1) and (b2), there exists a , such that for all , thus
for all .
(c) If A has and as its diagonal blocks, where and , without loss of generality we can assume , then by (7), we have
(d) If both and are diagonal blocks of A, without loss of generality we can assume , then we have
In the case of (a) (b) (c) (d), we have show that there exists a , such that for all . Note that (a) (b) (c) (d) cover all cases where A is a matrix in real Jordan canonical form except the two cases in (25). Nevertheless, by direct calculation, we have for the two cases in (25), which completes the proof. □
From Lemma 1, we know that except for the two trivial cases in (25), we have when t is sufficiently large, that is to say, there exists a , such that we have the expression (5) of torsion for all , which avoids a lot of potential trouble when we consider the limit of as in the proof of Theorem 2.
4.3. Function
The function is given by Proposition 6. In fact, we have
By (17) and (23), we see that all coordinates of can be expressed in the form of
where denotes the coordinate of corresponding to the kth row of the ith diagonal block of A. Hence
where is a linear combination of terms in the form of , where is a bounded function.
where denotes the maximum values of in the terms of the form in .
4.4. Proof of Theorem 2 (1)
In order to give a proof of Theorem 2 (1), we only need to prove Proposition 10 (1). In this subsection, we will discuss the two cases in which the zero solution of the system is unstable, and obtain . In fact, we will prove Lemma 2 and Lemma 3.
Lemma2.
Under the assumptions of Proposition 10, if , then for any given , we have .
Proof.
Suppose . Note that
where the functions and are both linear combinations of terms in the form of , where each is a bounded function. We will prove for the following cases. For simplicity, let .
(a) If A has a diagonal block , then by (26), (29), and (30), we have
where the constant , all and are bounded functions, the function is a linear combination of terms in the form of , and is a linear combination of terms in the form of , where , and each is a bounded function. Hence we obtain .
(b) If A has a diagonal block , then by (27), (29), and (30), we have
where is a polynomial satisfying and , the function is a linear combination of terms in the form of , and is a linear combination of terms in the form of , where , and each is a bounded function. Hence we obtain .
(c) If in A only those blocks are diagonal blocks satisfying , then we should consider the eigenvalues whose real part is less than M. In fact, suppose two diagonal blocks are in the ith and jth row of A, respectively. Then
which means this term has no contribution to the value of . In addition, note that diagonal blocks in A do not affect the value of . We define
where denotes the set of eigenvalues of A which excluding the zero eigenvalues in blocks.
(c1) Suppose that A has a diagonal block . Let denote the coordinate of corresponding to the row of a diagonal block of A, and , denote the coordinate of corresponding to the first and second row of the diagonal block of A, respectively. Then by (22) and (23), we have
where the constant , and all , , and are bounded functions.
(c2) Suppose that A has a diagonal block . Let denote the coordinate of corresponding to the row of a diagonal block of A, and the coordinate of corresponding to the first row of the diagonal block of A. Then by (16) and (17), we have
where the constants , and all and are bounded functions.
By (c1) and (c2), we can give the expression of in case (c). In fact, we suppose
are the all diagonal blocks whose eigenvalues satisfy . Then by (24), (32), and (33), we obtain
where the constant ,
and each is a bounded function.
In what follows, and denote the maximum values of in the terms of the form in and , respectively. Then by (34), we have
In the determinant of (29), we can see that at most one row corresponds to a diagonal block with eigenvalue M, and the real parts of eigenvalues of the diagonal blocks corresponding to the other two rows are not greater than N, otherwise the determinant vanishes in . Hence we have
Thus, we have . It follows that
where the constant , each is a bounded function, the function is a linear combination of terms in the form of , and is a linear combination of terms in the form of , where , and each is a bounded function. Hence we obtain .
Note that (a) (b) (c) cover all cases that satisfy , which completes the proof. □
Now we give Lemma 3.
Lemma3.
Under the assumptions of Proposition 10, if , and A has a diagonal block , then for any given , we have .
Proof.
Suppose , and A has a diagonal block . Then from (30), we have . From (24) and (26), we have .
If , then we have .
If , in order to obtain the limit of as , we need to compare the highest power of t of terms in the form in the numerator and denominator of . Let and denote the maximum value of in the terms of the form in and , respectively. Then we have
In fact, by (21) and (23), for a diagonal block , the functions and can reach the highest power of t, namely , thus and corresponding the first two rows of can reach the highest power of t. Hence by (28) and (29), we obtain (36). In addition, by (24) and (26), we have
Therefore . It follows that
where the constants , all and are bounded functions, and is a linear combination of terms in the form of , where , and each is a bounded function. Hence we obtain . □
Lemma 2 and Lemma 3 show that under the assumptions of Proposition 10, if the zero solution of the system is unstable, then . That is to say, Proposition 10 (1) is proved. Thus we proved Theorem 2 (1).
4.5. Proof of Theorem 2 (2)
We have proved Proposition 10 (1), and in order to prove Proposition 10 (2), we only need to prove the following lemma.
Lemma4.
Under the assumptions of Proposition 10, if , and in matrix A only those blocks are diagonal blocks satisfying , then for any given , we have or , where the constant .
Proof.
Set
where all eigenvalues of have negative real parts.
(1) If , then by (24) and (26), we have . In the determinant of (29), we can see that at most two rows correspond to the diagonal block , and the real part of eigenvalue of the diagonal block corresponding to the other row is negative. Hence . It follows that .
(2) If , then . By direct calculation, we have
Hence we have or . □
By Proposition 10 (1) and Lemma 4, we proved Proposition 10 (2), which completes the proof of Theorem 2.
4.6. Remark
In Theorem 2 and Proposition 10, the condition that A is invertible cannot be removed. In fact, we have the following two examples.
Nevertheless, since , we cannot obtain stability from . In fact, noting that A is a matrix in real Jordan canonical form which has a diagonal block , we know that the zero solution of the system is unstable.
(2) Let
Then by a direct calculation, we have
for any given . Nevertheless, since , the zero solution of the system is not asymptotically stable.
5. Examples
In this section, we give two examples, which correspond to Theorem 1 and Theorem 2, respectively.
5.1. Example 1
Let , and
Then is a four-dimensional linear time-invariant system, and Set
where
Then the Lebesgue measure of E satisfies By direct calculation, the limits of the first curvature and the torsion of the trajectory as are and for , respectively. Nevertheless, the third curvature of the trajectory satisfies
for any . Consequently, from Theorem 1, the zero solution of the system is asymptotically stable.
The graph of the function is shown in Figure 1, where .
5.2. Example 2
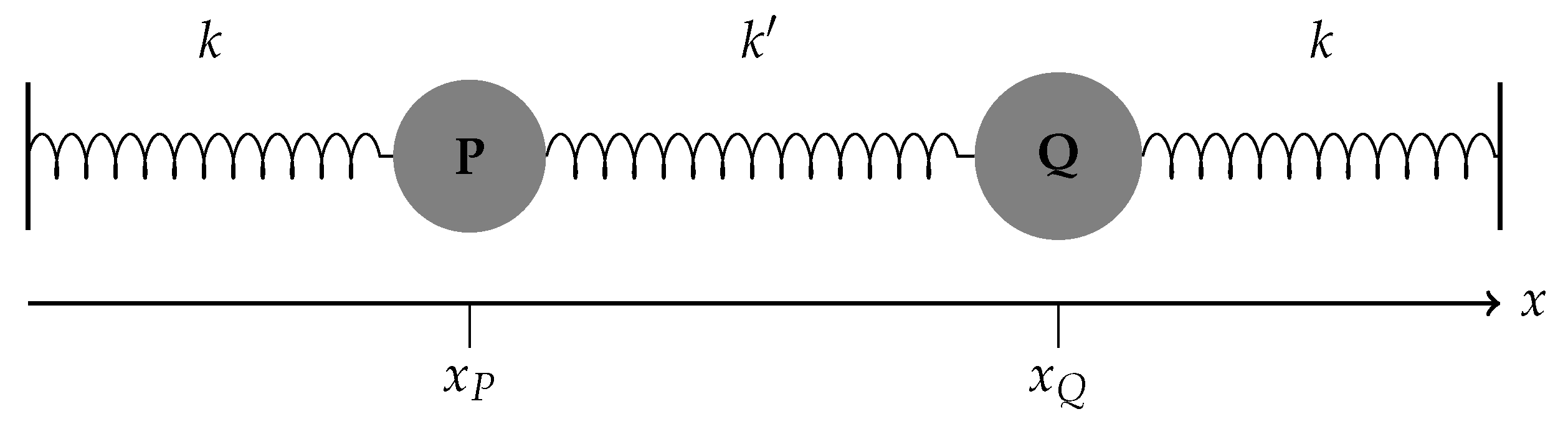
We consider a popular model in classical mechanics called coupled oscillators (cf. [10]). Two masses P and Q are attached with springs. Assume that the masses are identical, i.e., , but the spring constants are different, as shown in the Figure 2.
Let be the displacement of P from its equilibrium and be the displacement of Q from its equilibrium. Holding Q fixed and moving P, the force on P is
Holding P fixed and moving Q, the force on P is
Thus by Newton’s second law we have
Similarly, for Q we have
Introducing two variables and , the above equations are equivalent to the following linear system
For simplicity we denote the system by , where
Set
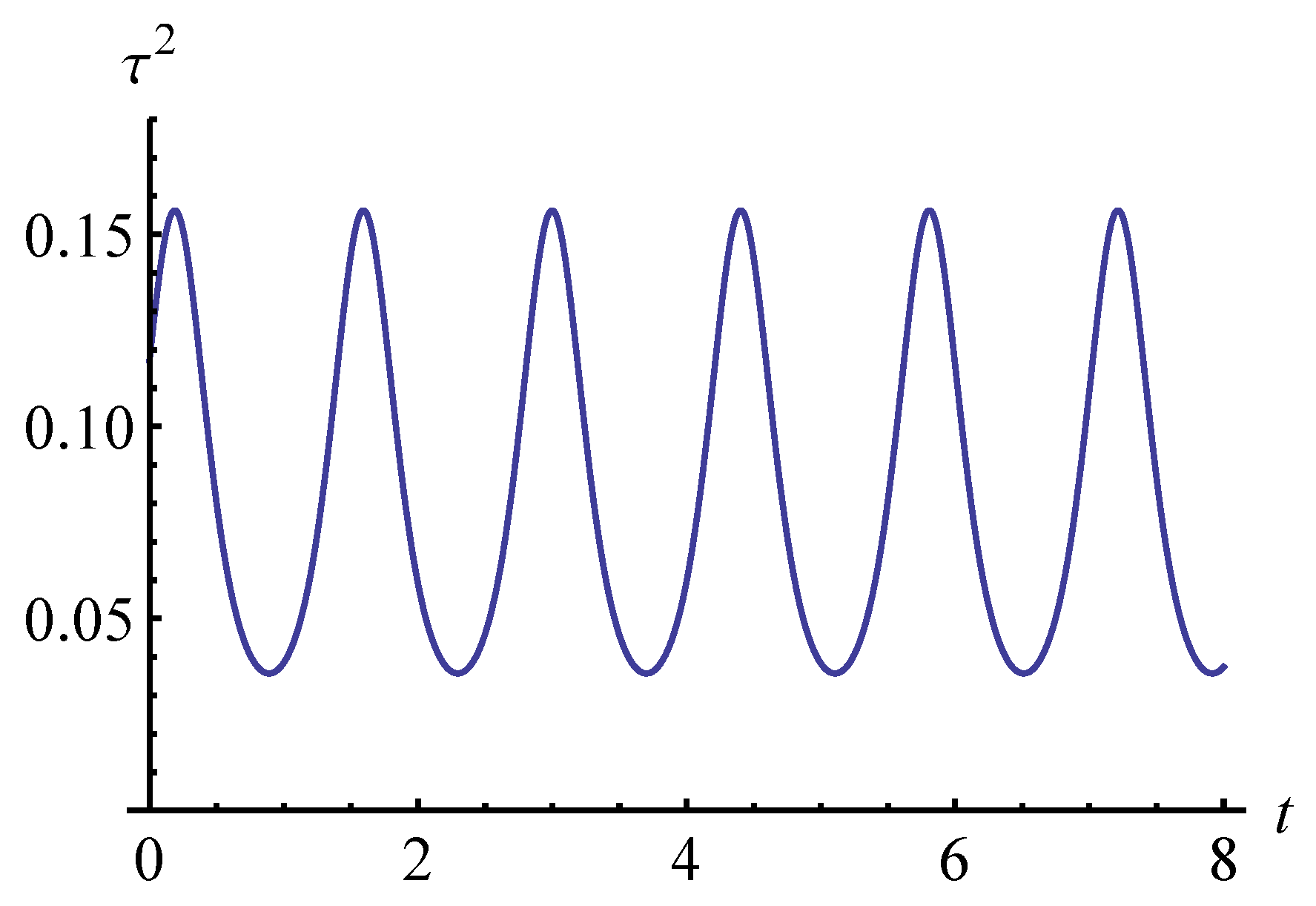
Then the Lebesgue measure of E satisfies By direct calculation, the torsion of the trajectory is a periodic function and does not exist for any . Hence by Theorem 2, the zero solution of the system (37) is stable.
As an example, we suppose that and , and the initial value . Then we have
The main contribution of this paper is to further develop the geometric description of stability of linear time-invariant systems in arbitrary dimension. Unlike traditional methods based on linear algebra, we focus on the curvature of curves. Specifically, the main results of this paper, Theorem 1 and Theorem 2 are proved. For the case where A is similar to a real diagonal matrix, Theorem 1 gives a relationship between the ith curvature of the trajectory and the stability of the zero solution of the system . Further, Theorem 2 establishes a torsion discriminance for the stability of the system in the case where A is invertible.
For each theorem, we give an example to illustrate the result. In particular, we use the coupled oscillators as an example of the torsion discrimination.
In the future, we will continue to use geometric methods to describe the properties of other kinds of control systems.
Author Contributions
Y.W. participated in raising questions and completing the calculation process; H.S. participated in raising questions and confirming the results; Y.C. and S.Z. participated in part of the calculation process and the calculation of examples. All authors have read and agree to the published version of the manuscript.
Funding
This research was funded by the National Natural Science Foundation of China (Grant No. 61179031).
Acknowledgments
The research is supported partially by science and technology innovation project of Beijing Science and Technology Commission (Z161100005016043).
Conflicts of Interest
The authors declare no conflict of interest. The funders had no role in the design of the study; in the collection, analyses, or interpretation of data; in the writing of the manuscript, or in the decision to publish the results.
References
Lyapunov, A.M. The General Problem of the Stability of Motion. Ph.D. Thesis, Univ. Kharkov, Kharkiv Oblast, Ukraine, 1892. (In Russian). [Google Scholar]
Wang, Y.; Sun, H.; Song, Y.; Cao, Y.; Zhang, S. Description of Stability for Two and Three-Dimensional Linear Time-Invariant Systems Based on Curvature and Torsion. arXiv2018, arXiv:1808.00290. [Google Scholar]
Wang, Y.; Sun, H.; Huang, S.; Song, Y. Description of Stability for Linear Time-Invariant Systems Based on the First Curvature. Math. Methods Appl. Sci.2020, 43. [Google Scholar] [CrossRef]
Gluck, H. Higher Curvatures of Curves in Euclidean Space. Am. Math. Mon.1966, 73, 699–704. [Google Scholar] [CrossRef]
Perko, L. Differential Equations and Dynamical Systems; Springer: Berlin, Germany, 1991. [Google Scholar]
Chen, C.-T. Linear System Theory and Design, 3rd ed.; Oxford University Press: Oxford, UK, 1999. [Google Scholar]
Marsden, J.E.; Ratiu, T.; Abraham, R. Manifolds, Tensor Analysis, and Applications, 3rd ed.; Springer: Berlin, Germany, 2001. [Google Scholar]
do Carmo, M.P. Differential Geometry of Curves and Surfaces; Prentice-Hall: New York, NY, USA, 1976. [Google Scholar]
Wang, Y.; Sun, H.; Cao, Y.; Zhang, S.
Torsion Discriminance for Stability of Linear Time-Invariant Systems. Mathematics2020, 8, 386.
https://doi.org/10.3390/math8030386
AMA Style
Wang Y, Sun H, Cao Y, Zhang S.
Torsion Discriminance for Stability of Linear Time-Invariant Systems. Mathematics. 2020; 8(3):386.
https://doi.org/10.3390/math8030386
Chicago/Turabian Style
Wang, Yuxin, Huafei Sun, Yueqi Cao, and Shiqiang Zhang.
2020. "Torsion Discriminance for Stability of Linear Time-Invariant Systems" Mathematics 8, no. 3: 386.
https://doi.org/10.3390/math8030386
APA Style
Wang, Y., Sun, H., Cao, Y., & Zhang, S.
(2020). Torsion Discriminance for Stability of Linear Time-Invariant Systems. Mathematics, 8(3), 386.
https://doi.org/10.3390/math8030386
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.
Article Metrics
No
No
Article Access Statistics
For more information on the journal statistics, click here.
Multiple requests from the same IP address are counted as one view.
Wang, Y.; Sun, H.; Cao, Y.; Zhang, S.
Torsion Discriminance for Stability of Linear Time-Invariant Systems. Mathematics2020, 8, 386.
https://doi.org/10.3390/math8030386
AMA Style
Wang Y, Sun H, Cao Y, Zhang S.
Torsion Discriminance for Stability of Linear Time-Invariant Systems. Mathematics. 2020; 8(3):386.
https://doi.org/10.3390/math8030386
Chicago/Turabian Style
Wang, Yuxin, Huafei Sun, Yueqi Cao, and Shiqiang Zhang.
2020. "Torsion Discriminance for Stability of Linear Time-Invariant Systems" Mathematics 8, no. 3: 386.
https://doi.org/10.3390/math8030386
APA Style
Wang, Y., Sun, H., Cao, Y., & Zhang, S.
(2020). Torsion Discriminance for Stability of Linear Time-Invariant Systems. Mathematics, 8(3), 386.
https://doi.org/10.3390/math8030386
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.


{kind=link}
{kind=link}
{kind=link}