1. Introduction
Historically, British writer Geoffrey Grigson in 1935 coined the term biomorphism in the context of art [
1]. Biomorphs are also used in painting [
2], architecture [
3,
4] and industrial design [
5,
6]. Biomorph may be defined as a painted, drawn, or sculptured free form or design suggestive in shape of a living organism, especially an ameba or protozoan. The concept of fractal generations has a rich history in computer graphics. In 1918, Gaston Julia introduced the Julia set using a simple iterative process to generate interesting fractals. Interest in this concept has grown significantly due to the visual beauty, complexity and self similarity of the Julia sets; see for instance [
7,
8,
9,
10,
11]. In 1975, Benoit Mandelbrot [
12] extended the work of Gaston Julia and introduced a new set of connected Julia sets called Mandelbrot set. The Mandelbrot and Julia sets have been studied for quadratic [
9,
11,
13,
14], cubic [
9,
14,
15,
16,
17], and higher degree polynomials [
18] under Picard orbit, which is a one-step iteration process.
Recently, Rani and Kumar [
19,
20] studied a one-step Mann iteration process for generating Julia and Mandelbrot sets for a class of
n degree complex polynomials. Their work was further extended by Chauhan et al. [
21] by studying a two-step Ishikawa iteration for generating relative superior Julia and Mandelbrot sets. Moreover, Chauhan et al. [
22] studied the two-step Ishikawa iteration process for non-integer values polynomials for generating relative superior Julia and Mandelbrot sets. Furthermore, Ashish and Rani [
23] investigated three-step Noor iterations for generating Julia and Mandelbrot sets. Very recently, many others have proposed other forms of iterations for generating different Julia and Mandelbrot sets; see, for instance, [
24] and references therein.
In 1986, Pickover introduced a modification of the Julia sets called biomorphs [
25]. Though the biomorphs were accidentally found by Pickover, they have found applications in biology and art (see [
26,
27,
28]). We note that there are very few results on iterative methods for generating biomorphs in the literature. In 2016, Gdawiec et al. [
29] introduced a new set of biomorphs by using Pickover algorithm with Mann and Ishikawa iterations. It was found that the changes in the iteration process caused varying dynamics and behaviour of the generated biomorphs with interesting artistic features compared to the ones generated using the Pickover algorithm with the Picard orbit.
In this paper, we employ a new general iteration with the Pickover algorithm and obtain a new set of biomorphs. First, we present for the first time escape criterion results for general complex polynomials containing quadratic, cubic and higher order polynomials. We then combine the new general iteration with the Pickover algorithm and obtain and examine new sets of biomorphs with interesting artistic features.
The rest of the paper is organized as follows. In
Section 2, we recall some basic definitions and iterative processes necessary for our study. In
Section 3, we present the escape criterion results for general complex polynomials. We obtain as corollaries such results for quadratic, cubic and higher order polynomials. Even our corollary generalizes some previous results. In
Section 4, we present our algorithm and biomorphs generated by the algorithm. In
Section 5, we give some concluding remarks and possible future work in this direction.
2. Preliminary Results and Iteration Methods
Let
be a function in a complex plane
and
be a starting point. Given
the recursive formula
is called Picard iteration or orbit
of the starting point
For a given function
P, the behaviour of the orbit
defined by the sequence
depends on the selected
value. The set of points for which the orbit is chaotic is called the Julia set.
The behaviour of the orbit
defined by the set or sequence of points
is studied using an escape-time algorithm. An escape-time algorithm terminates an iterating formula when either the size of the positive orbit
exceeds a selected bailout real value
or an iteration limit
is reached. When any of these occurs, the pixel corresponding to the starting point
is coloured according to the final or last iteration number. In the case of a given Julia set, the classical approach obtains the magnitude
of
or Euclidean norm of the orbit
where
and
are the real and imaginary parts of
respectively. The classical convergence criterion of the escape-time algorithm is given by
Pickover relaxed (
1) and introduced the following criterion.
The image obtained by his criterion is called biomorph: resembling unicellular and microbial organisms. This leads to a new research consideration of the Julia sets using (
2) instead of (
1); see for instance [
26,
27,
28,
29].
Definition 1. The set of all points infor which the orbits do not converge to a point at infinity is called a filled Julia set denoted byi.e., The Julia set of P denoted byis the boundary of filled Julia set, i.e.,
Definition 2. The Mandelbrot set M is the set of all parametersfor which the Julia setwhereis connected, i.e.,Equivalently The general escape criterion for Julia and Mandelbrot sets using the Picard orbit is given by the following result (see, e.g., [
14]).
Theorem 1. Givenwhereif there existssuch thatthenas The term is called the escape radius threshold for generating the Julia and Mandelbrot sets using the Picard orbit for quadratic, cubic and general polynomials.
The following iterations were introduced as generalizations of the Picard iteration for approximating the fixed point of a mapping :
- (i)
Mann iteration [
30]: given
, then
where
- (ii)
Ishikawa iteration [
31]: given
then
where
- (iii)
Noor iteration [
32]: given
then
where
The Mann, Ishikawa and Noor iterations have been employed for generating Julia and Mandelbrot sets [
23], superior Julia and Mandelbrot sets [
19,
20], relatively superior Julia and Mandelbrot sets [
33,
34,
35], superfractals [
36], generalized Julia sets [
17] and polynomiographs [
37,
38,
39]. Recently, Gdwaiec et al. [
29] also considered the Mann and Ishikawa iterations with the Pickover algorithm for generating biomorphs.
In this paper, we study a more general and faster iteration method and employ it with the Pickover algorithm for generating biomorphs. In particular, we consider the following iteration: given
then
where
It is easy to see that the iteration process (4) is general than the Mann, Ishikawa and Noor iterations. Moreover, the convergence of (4) to a fixed point of a nonlinear mapping (when
is a real Banach space) was shown in [
40]. Moreover, (4) has numerical advantages over Mann, Ishikawa Noor and many other iterations (see [
40]).
3. Escape Criterion Results
The escape criterion plays a vital role in the generation and analysis of julia sets, Mandelbrot sets, and their generalizations. In this section, we describe some escape criterion for general polynomials of the form
where
It obviously contains quadratic, cubic and higher order polynomials. The presence of the term
makes it more general. The case when
is just new and has never been studied in the literature in this context. Moreover, when
, we obtain the polynomial
, which has been studied by some authors, for instance, Abbas et al. [
24] and Nazeer et al. [
41]. In addition, complex polynomials of the form (5) can be found in several problems arising from engineering such as digital signal processing. In particular, they are used in determining the pole-zero plots for signals and studying the structure and solutions of linear-time-variant [
42].
Let
be a complex space,
be a complex polynomial and
be a sequence whose orbit around
is generated by
where
3.1. Escape Criterion for General Complex Polynomials
We now give our escape criterion result for general complex polynomials.
Theorem 2. Letand supposewhereandDefineas in (6)
. Then, as Proof. Put
and
Then
Moreover, since
we get
Thus
From the hypothesis of our theorem, we know that
which implies that
Hence
Consequently
Since
we have
Since
thus we have
From (7), we get
Following a similar argument as above, we have
Furthermore, from (6), we have
Hence
From the hypothesis of the theorem, we have
This implies that
Hence, there exists a real number
such that
Therefore
Hence by induction, we obtain
This means that
as
This completes the proof. □
Note that the inclusion of the term makes Theorem 2 way more interesting. We now draw some results for special values of p from the above theorem.
When although the following result is a special case of our Theorem 2 above, yet it is new in itself.
Theorem 3. Letand supposewhereandDefineas in (6)
. Then as When
the following result generalizes Theorem 3 of Abbas et al. [
24].
Theorem 4. Letand supposewhereandDefineas in (6)
. Then as Now have a look at the following corollaries.
Corollary 1. SupposeandwhereandDefineas in (6)
. Then, as Corollary 2. If for anywe have thatwhereandThenfor someso thatas Next, we have a look at escape criterion for cubic and quadratic polynomials.
3.2. Escape Criterion for Cubic Complex Polynomials
Theorem 5. Letand supposewhereandDefineas in (6)
. Then as Remark 1. The above theorem is a special case of Theorem 2 when
The following corollaries can be obtained from Theorem 5
Corollary 3. SupposeandwhereandDefineas in (6)
. Then as Corollary 4. If for anywe have thatwhereandThenfor someso thatas 3.3. Escape Criterion for Quadratic Complex Polynomials
The following theorem is a special case of Theorem 2 when
Theorem 6. Letand supposewhereandDefineas in (6)
. Then, as The following are refinements of this theorem.
Corollary 5. Supposeand letwhereandDefineas in (6)
. Then, as Corollary 6. SupposeIf for anywe havewhereandThenfor someso thatas Note that Corollary 6 provides a condition for computing the filled Julia set for the quadratic polynomials. Indeed, for any point satisfying we find out the orbit of If for any lies outside the circle of radius then, we say that the orbit escapes to infinity, which means that x is not in the filled Julia set. Otherwise, if never exceeds this bound, then x is by definition in the Julia set.
4. Biomorphs Generation
In this section, we present some biomorphs for quadratic, cubic and higher degree polynomials. We investigated the change of parameters on the shape and variation of colors on the biomorphs. New sets of biomorphs were obtained with interesting distinct features. The biomorphs are generated using Lenovo PC with the following specification: Intel(R)core i7-600, CPU 2.48 GHz, RAM 8.0 GB, MATLAB version 9.5 (R2019b). The pseudo-code for generating the biomorphs is presented in Algorithm 1.
| Algorithm 1: Biomorph generation. |
 |
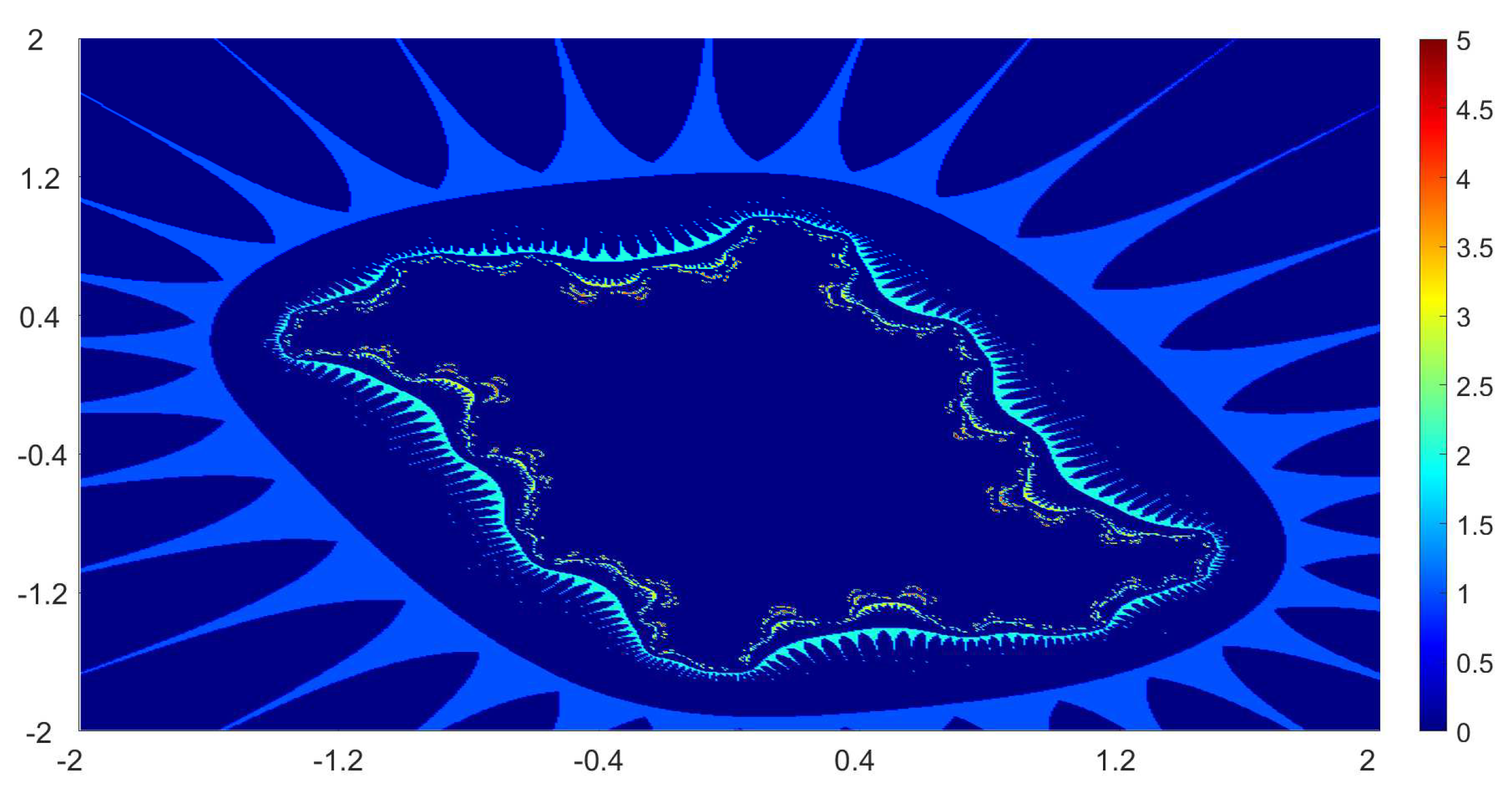
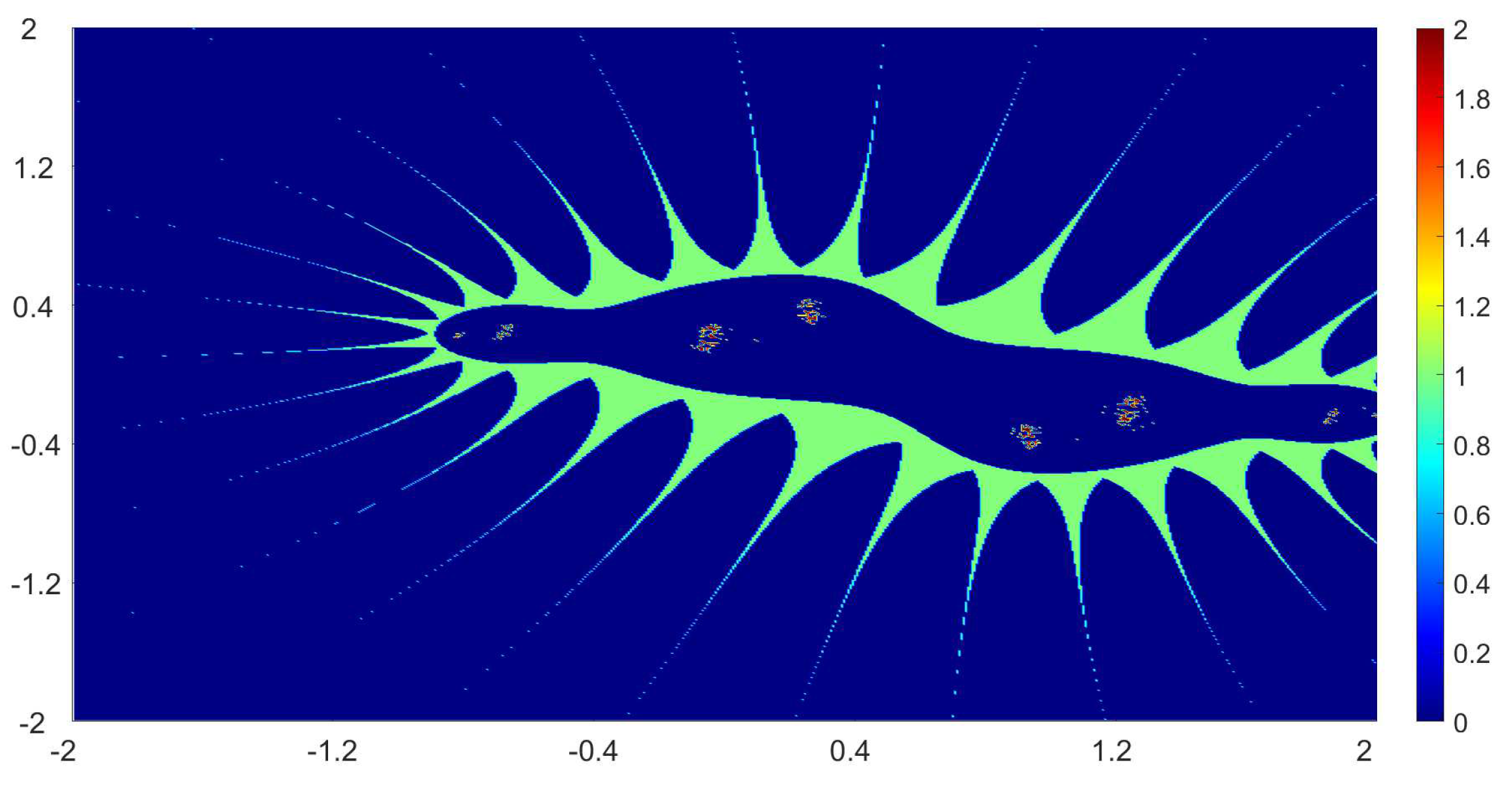
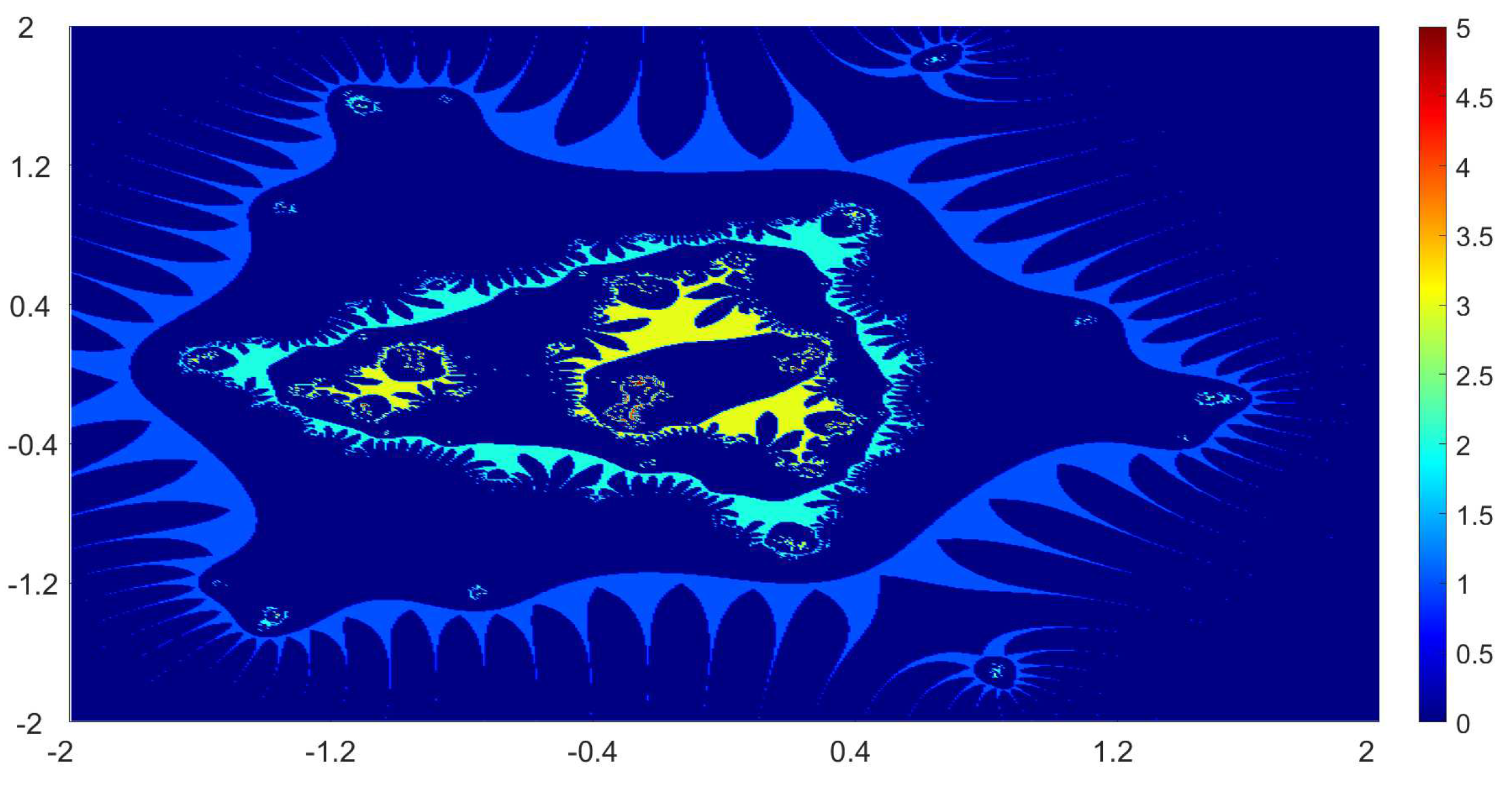
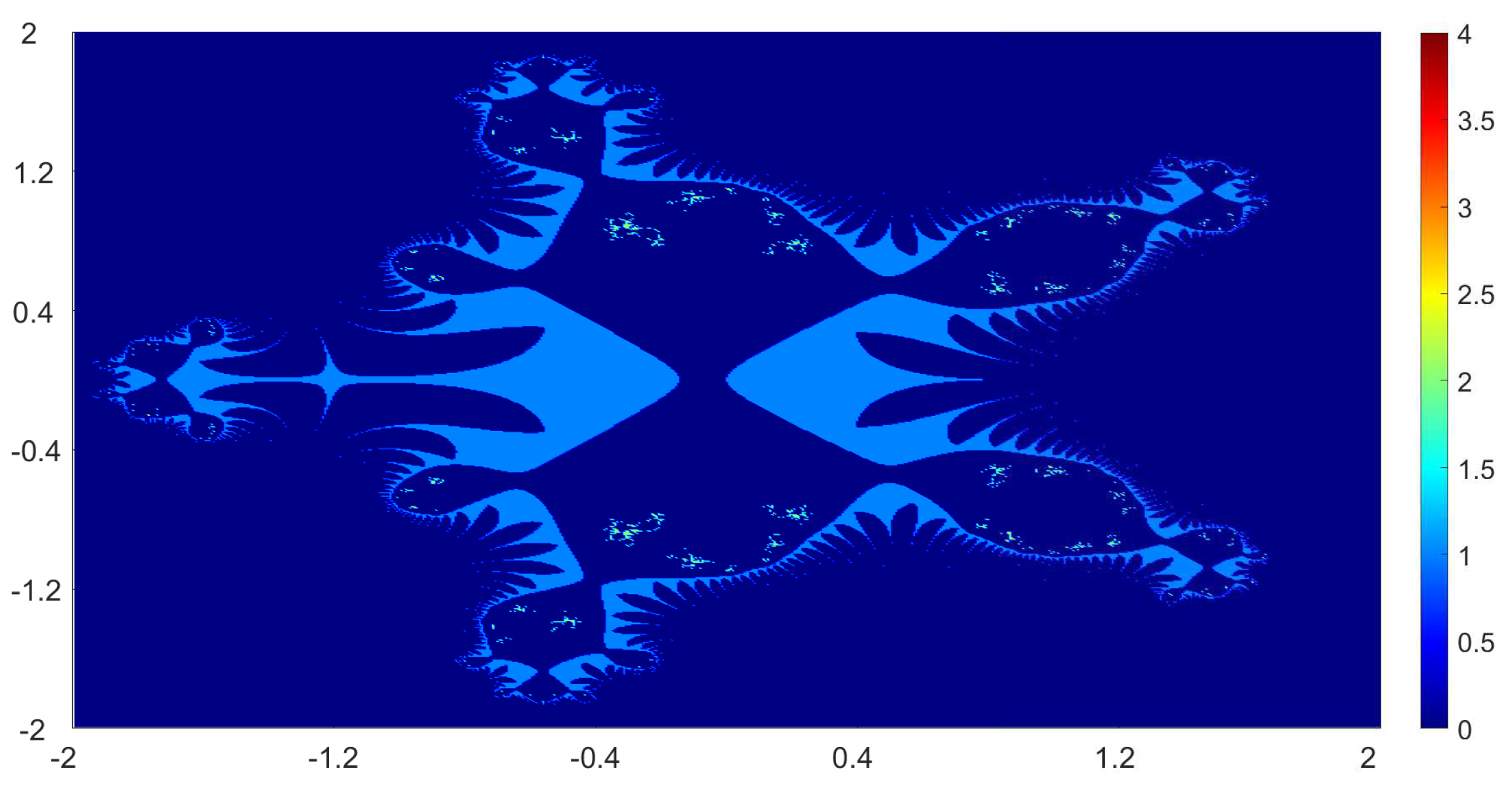
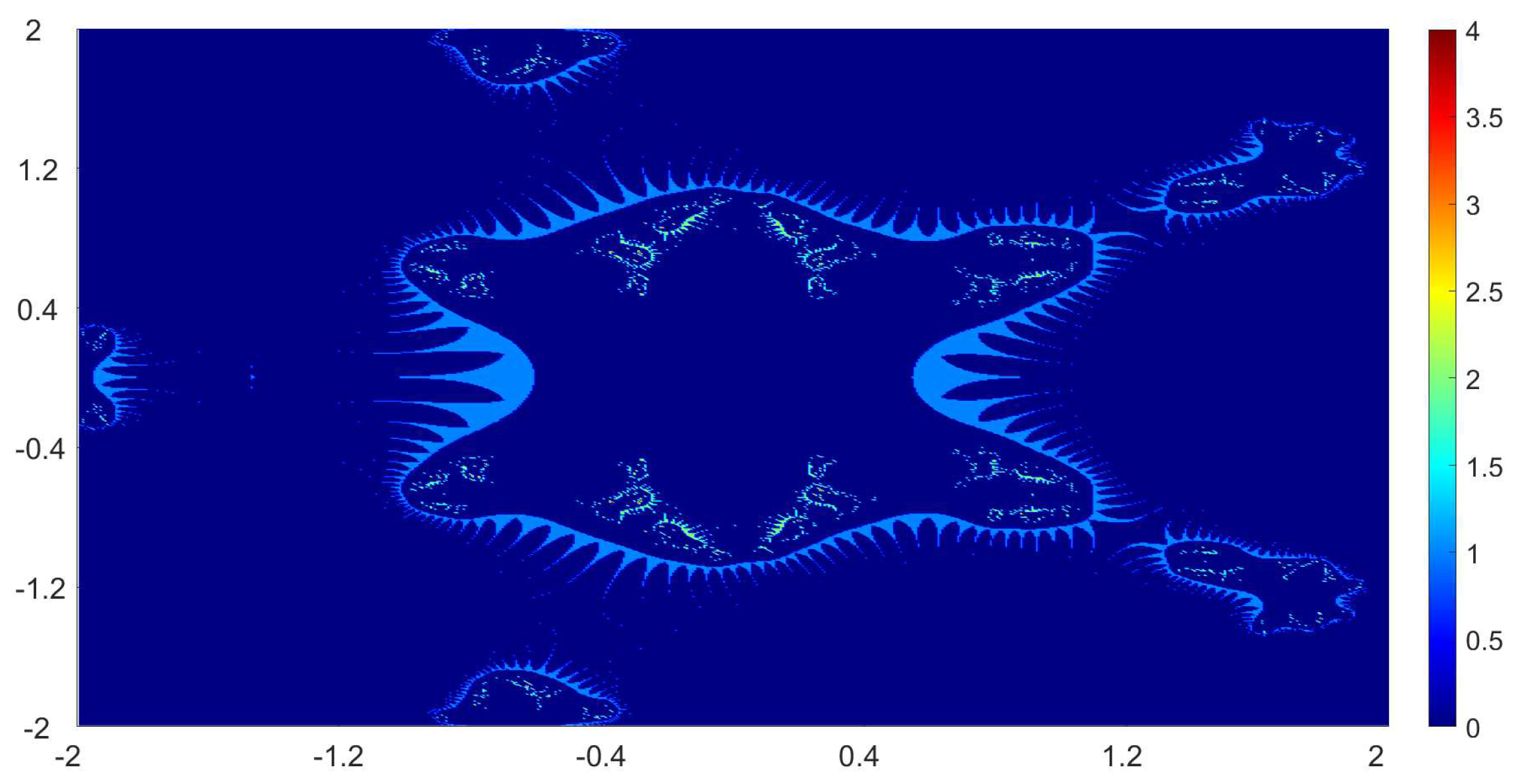
Now, we present the biomorphs generated by using Algorithm 1. For all our examples, we choose
Example 1. We consider the polynomialWe vary the values of r and parametersas follows:
- (a)
- (b)
- (c)
- (d)
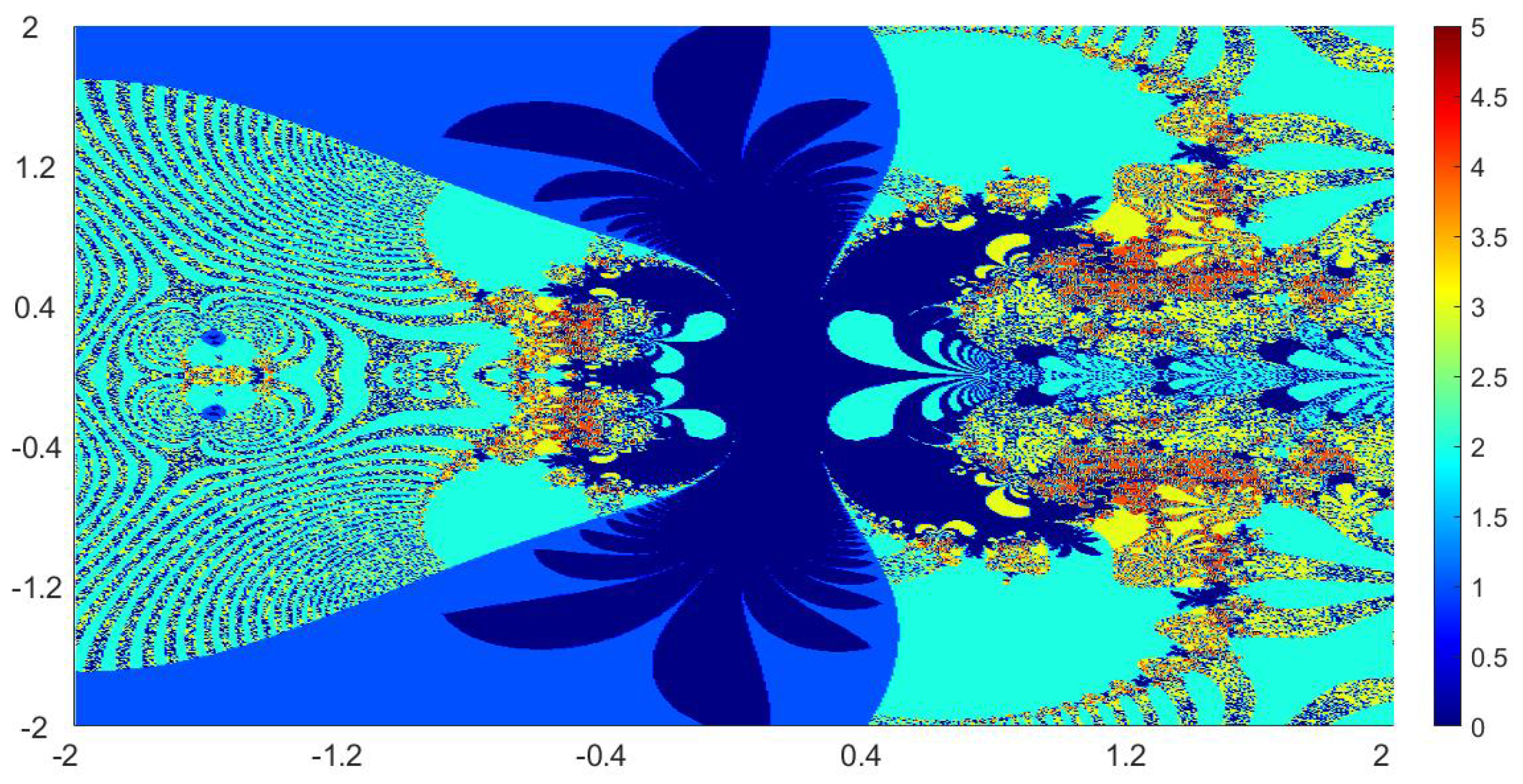
Figure 1, Figure 2, Figure 3 and Figure 4 present the obtained biomorphs. From the images, we see that the change in the parameters alters the colours and shapes of the biomorphs. Moreover, we can observed that the use of complex value of r adds swirls and twists to the obtained patterns. This makes the images look more dynamics and vivid. Example 2. In this example, we consider the quadratic polynomialand choose the parameterusing the following switching technique [29], i.e.,whereare non-zero complex variables. We fixed the parametersand vary the values ofandas follows: - (a)
- (b)
- (c)
,
- (d)
The generated biomorphs are shown in Figure 5, Figure 6, Figure 7 and Figure 8. In the switching technique, it is seen that a small change in the values of and caused significant changes in the shapes, colours and dynamics of the biomorphs. Example 3. We consider the cubic polynomialand chooseusing the switch technique as in the previous example. We vary the values ofand α as follows:
- (a)
- (b)
- (c)
- (d)
Figure 9, Figure 10, Figure 11 and Figure 12 show the generated biomorphs. It is seen that a small change in the value of the parameters caused significant change in the shapes and dynamics of the biomorphs. Example 4. We consider the polynomialand vary the values ofas follows:
- (a)
- (b)
- (c)
- (d)
The obtained biomorphs are shown in Figure 13, Figure 14, Figure 15 and Figure 16. We see that the change in the parameters has great impact on the shape of the obtained biomorphs. Example 5. Finally, in this last example, we consider a complex hyper-functionwith different values of r as follows:
- (a)
- (b)
- (c)
- (d)
We also take The obtained graphics are shown in Figure 17, Figure 18, Figure 19 and Figure 20. We note that the obtained biomorphs do not really have organismic structure, however, the obtained graphics are very fascinating from an artistic point of view. These can be of interest to someone working in automatic creation of nice looking objects and general artworks. Moreover, the change in the value of r produced different graphics with distinct colours, shapes and dynamics. 5. Conclusions
In this paper, a new general iteration was used to study the behaviour of biomorphs with complex polynomials. The escape criterion for quadratic, cubic and higher degree polynomials for the general iteration were presented. Some new sets of biomorphs were also generated. It was observed that the variation of parameters caused changes in the dynamics, colours and shapes of biomorphs in most cases. The obtained biomorphs are interestingly different in comparison to those obtained by Pickover (using standard Picard iteration) [
25] and Gdawiec (using Mann and Ishikawa iterations) [
29].
In our future research, we would like to extend the works of Negi et al. [
34] and Rani et al. [
35] on the noise in superior Mandelbrot set and superior Julia sets respectively to modified biomorphs introduced in this paper. Moreover, it is interesting to develop automatic biomorphs searching methods like those proposed in Ashlook et al. for Julia set [
43,
44]. Furthermore, we will like to study other category of fractals types of complex fractals and inversion fractals with respect to the generation of biomorphs.
Finally, we note that the work in this paper can be developed by using other non-standard iterations (see [
37,
45]) known in fixed point theory for generating biomorphs.
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affliations.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}




















