1. Introduction
Beams are important components in many engineering applications. The Euler- Bernoulli beam is the most popular model but it is linear and its validity is limited only to small deflections. For moderately large deflections it is better to use the nonlinear Gao beam model which was firstly introduced in [
1] as a static problem and a few years latter as a dynamic model in [
2]. This nonlinear beam model respects the original Euler–Bernoulli hypothesis—i.e., the straight lines orthogonal to the midsurface remain straight and orthogonal to it even after the deformation.
The paper is devoted to the identification of coefficients representing material properties for a static Gao beam model
where
is a deflection of the beam,
E stands for Young’s modulus,
I is the constant area moment of inertia while functions
,
and
depend on the Poisson ratio
,
t stands for half-thickness,
b is a width of the beam and
q is the distributed transverse load.
P is the axial force acting at the point
. The aim of the identification is to determine piecewise constant parameters
E and
to the beam with a priori known material distribution. The identification problem is defined by minimizing a cost functional
J.
A similar problem regarding the Euler–Bernoulli beam model was studied in [
3], where the extension to higher-order differential equations was used. Inverse problems—i.e., problems to find simultaneously the solution and the coefficient of the Euler–Bernoulli beam equation—was studied in [
4,
5]. Here, the original problem was transformed into a higher-order well-posed problem following the idea of the method of variational imbedding. An inverse problem for a dynamic Euler–Bernoulli beam by using spectral data was described in [
6]. As far as we know there is only one paper [
7] dealing with the inverse problem for a dynamic Gao beam using a collage-based method, where data from [
8] were considered for a numerical example.
In this paper, we focus on an identification of material parameters for the static Gao beam model. To the authors’ knowledge, such a problem has not been studied yet. The material parameters are in fact coefficients of a nonlinear differential equation and their calculation can be based on the solution of the corresponding state problem for given data. For this purpose, an optimal control approach can be used. The similar idea for the identification of coefficients in scalar elliptical differential equations was used in [
9], where a steady state groundwater flow problem was considered as a numerical example and a coefficient of hydraulic conductivity was identified.
The paper is organized as follows. In
Section 2, the nonlinear Gao beam model is introduced and known results about the existence of a unique solution are reviewed. The problem for the identification of material parameters for Gao’s beam is described as an optimal control problem in
Section 3. The existence analysis is provided. In particular, we aim to prove the existence of a solution to this problem and show that the solutions of the state problem depend continuously on material parameters.
Section 4 deals with a discretization of the studied problem and convergence analysis.
Section 5 studies sensitivity analysis.
Section 6 presents numerical examples. Concluding remarks are introduced in
Section 7.
The paper deals with nonlinear Gao beam model, which is suitable for moderately large deflections. In many engineering applications it can be very useful to identify material parameters of this beam model with respect to given input data. The contribution of the presented paper can be seen in proof of the existence of at least one solution of the studied problem, the convergence analysis of its discretization and finally the sensitivity analysis that provides the gradient for the efficient numerical realization.
2. Gao Beam Model
This section is focused on a nonlinear beam model which was introduced by D. Y. Gao. This model is suitable for moderately large deflections and uses the Euler–Bernoulli hypothesis. We take into account that the material of the beam is isotropic and the beam has a uniform cross-section of a rectangular shape. Moreover both a transverse and axial loads are considered in this paper. The governing equation for the Gao beam is given by the fourth order nonlinear differential equation
where
and
w is an unknown deflection,
E is Young’s modulus,
is the Poisson ratio. The area moment of inertia
is constant with
as a thickness and
b as a width of the beam. The symbol
L stands for the length of the beam. The distributed transverse load is denoted by
q and
P represents the constant axial force acting at the end point
We distinguish two types of axial force cases, the case with an axial force causing compression
and the case with axial force causing tension
, see
Figure 1.
The beam model needs to be completed by one type of the following stable and unstable boundary conditions (see [
10]):
- (B1)
Simply supported beam: ;
- (B2)
Fixed beam: ;
- (B3)
Propped cantilever beam: ;
- (B4)
Cantilever beam:
The unstable boundary conditions are separated from the stable ones by a semicolon. In order to give the weak formulation of the problem (
2), we define the space
V of the admissible displacements that contains the stable boundary conditions. The subsequent analysis is restricted to the simply supported Gao beam with the boundary conditions (B1), see
Figure 1. The study for other types of boundary conditions (B2)–(B4) would follow similar steps. The space of admissible displacements is defined as
where
is the
Sobolev space—see [
11]. The corresponding variational formulation of the Gao beam Equation (
2) reads as follows:
where
Existence of a unique solution of the considered problem (
4) has been studied in [
12]. In particular it was shown that if
- (A1)
;
- (A2)
E, I, , are positive constants;
- (A3)
where
then the problem (
4) has a unique solution. The symbol
stands for Euler’s critical force given by
also shown in [
13]. For the simply supported beam Euler’s critical force
can be computed by the formula
also shown in [
14]. Therefore, the critical value
has the following form
In the recent paper [
15] the derivation of the Gao beam model was analyzed and small corrections of the governing equation were presented. This correction consists in a different definition of the constant
, instead of
the modified form
is proposed. This correction in
respects the fact that the Gao beam is tougher than the Euler- -Bernoulli beam. According to this our paper uses a modified Gao beam model in the form
Due to this fact we consider the modified critical value
instead of
defined by (
7).
3. Parameter Identification
The aim of the identification of parameters is to determine coefficients of a given differential equation using experimentally measured values. This section deals with the identification of the material parameters given by the Young modulus
E and Poisson ration
in the modified Gao beam Equation (
8) by using the
optimal control approach. According to the definition of
and
f in (
3), we consider the following equation
in
as a state problem. Here, coefficients
E and
play the role of
control variables. We suppose that the interval
is decomposed into mutually disjoint open intervals
, called material elements,
—i.e.,
, and
Next we define the
set of admissible controls by
where
are given constants and
is the set of constant functions on the subinterval
Therefore,
is the closed, convex subset of couples of piecewise constant functions on the partition of
. The variational formulation of the state problem (
10) reads as
where
and
using the definitions of
,
Taking into account the conditions
(A1)–
(A3), the modified critical value
given by (
9) and the definition of
, we arrive at the following existence and uniqueness result for (
12): let
- (A1)’
;
- (A2)’
t, b be positive constants;
- (A3)’
, where ,
then for any
there exists a unique solution
to the problem (12). This can be proven using the results established in [
12]. Note that
For the subsequent analysis we assume that (A1)’–(A3)’ hold.
We will study the parameter identification problem as an
optimal control problem—see [
16,
17]—defined as follows
If
is a solution to (
13) and
solves
, then the pair
is called
an optimal pair of problem (
13).
For further consideration we need to introduce an appropriate continuity concept in the admissible set
. The pair
is a piecewise constant vector function over the partition of the interval
, so that it can be identified with a vector
, where
Similarly if
then
and
for
By convergence in
we mean the convergence of components in the following sense:
As the admissible set can be identified with a bounded and closed subset of , then from the Bolzano–Weierstrass theorem, it follows that is a compact set.
In order to prove the existence of a solution to problem (
13), we need a continuous dependence of the solution
to the state problem (12) on material parameters.
Theorem 1. Let and , such thatand be the solution to . Thenand solves . Proof. The proof consists in three steps. Firstly, we show that the sequence is bounded in V.
Step 1. Let
solve
From (
11) it is clear that
since
Therefore,
In order to estimate the term with the axial force
P, we apply modified Almansi’s inequality—see [
18].
Let a function y be such that and thenThe inequality (
17) can be used with
, owing to the boundary condition
(B1) and
. Thus
holds for any
Let
be given. Then by using (
11), (
16), (
18) and Friedrich’s inequality:
for any
where
is the norm and
the seminorm in
V we get
where
using the assumption
(A3)’. If
then (
19) trivially holds with
For the right hand side in (
15) we get
where Hölder’s inequality and (
11) were used. Finally, from (
15), (
19) and (
20) we see that
is bounded in
Therefore there exists its subsequence, for simplicity we denote it as
again, such that
Step 2. Next we show that
w solves (
12). We prove that
Indeed
using that
and (
21). Similarly
making use of (
14), the compact impact embedding
into
(
21) and the formula
The last limit passage (24) can be done in a similar way. Finally, for
, we have
as
w solves (
12). Since there exists a unique solution to this problem, the whole sequence
tends weakly to
Step 3. To prove strong convergence, it is sufficient to show that
for
in
V, where
is the norm with respect to which
V is complete. Then
From this, strong convergence of to w in V follows. □
Now we prove the existence at least one solution of the identification problem (
13). To this end we suppose that the cost functional
J is continuous in
—i.e.,
Theorem 2. Let be given by (11) and J satisfy (25). Then the identification problem (13) has a solution. Proof. Let
be a minimizing sequence of
—i.e.,
where
and
is a solution to the state problem
. Since
is compact, there exists a subsequence
(denoted by the same symbol) in
and a pair
, such that
and according to the previous theorem,
in
V and
solves the state problem
From continuity of
J we obtain
i.e.,
solves the problem (
13). □
There exists a large class of functionals
J, satisfying (
25). For example, the standard least square form
where
is the solution to the state problem for given
is a target deflection of the beam and
stands for an appropriate norm in
V. It is easy to see that the cost functional
J is continuous if, for example,
, and
is given by the
norm.
In practice, the function
z can be given by discrete measured values which are provided from an experiment—i.e., we have at our disposal point-wise measurements of
z at a finite number of points
In this case, the cost functional
J is defined by
The function
is represented by a continuous function, owing to the fact that
is compactly embedded into
, see [
19]. Thus the function
is continuous and well-defined.
4. Discretization and Convergence Analysis
Since the analytic solution of (
13) is hard to find, we need to use an appropriate approximation of the considered problem. We start with a discretization of the state problem (
12) by using a finite element approach, see [
20]. Let
be the nodal points defining the partition of
into intervals
of length
and
be the norm of
destined to tend to zero. We shall suppose that the system
is consistent with the (fixed) partition of
into material elements
meaning that the end-points of
belong to
for any
In addition, we suppose that there exists a constant
which does not depend on
h such that
With any
we associate the finite-dimensional space
defined by
where
is the space of cubic polynomials defined on the subintervals
The discretization of (
13) reads as follows:
where
solves the state problem (29) defined by
Using classical continuity and compactness arguments we obtain the following existence result.
Theorem 3. Let be given by (11). Then (28) has a solution for any . Next, we shall study the relation between the optimal control problem (
13) and its discretization (
28) for
We use notation
to point out that
is used in (29) with
. Let us recall that
itself does not depend on
Theorem 4. Let be a sequence, such that , in
for , and be the solution to . Thenwhere is the solution to . Proof. Since the sequence
is bounded in
there exists a subsequence
such that
Let
be arbitrary. Then there exists a sequence
, such that
due to the fact that the system of the discrete spaces
is dense in
Passing to the limit with
in the weak formulation
and using (
30) and (
31) we get
The existence of a unique solution of
is guaranteed, therefore (
30) holds for the whole sequence
. Strong convergence can be shown similarly as in Theorem 1. □
The main result of this section is the following convergence theorem. For simplicity we denote a sequence and its subsequence by the same symbol.
Theorem 5. Let be a sequence of optimal pairs of (28), . Then there exists a subsequence , such that for where is an optimal pair of (13). Moreover, any accumulation point of in the sense of (32) has this property. Proof. The existence of subsequence
satisfying (
32) is obvious because of compactness of
and
as follows from Theorem 4. Let
be arbitrary but fixed. The classical convergence result says that
In addition, the definition of (
28) yields
and from continuity of
J in
V we get
—i.e.,
is an optimal pair of (
13). From the proof it is clear that any other accumulation point of
is also an optimal pair of (
13). □
Next, we derive the algebraic formulation of the discretized problem using a finite element approach. Let us recall that any
can be identified with the vector
where
and the admissible set
with the compact set
Since
is finite dimensional, one can express the solution
of (29) as
, where
are basis functions of
and
. Then the discrete state problem (29),
leads to the system of nonlinear algebraic equations
where
is the vector whose components are the coefficients
of the linear combination,
corresponds to the bilinear form
in (12), and
to the nonlinear form
. Vector
is the force vector corresponding to the linear form
. The matrices
,
and the vector
are computed using the material constants
where
and
To compute the nonlinear matrix
we use Reddy’s formula—see [
20]:
Using the nodal basis system
the components of vector
are the values of
and
at the nodal points
,
,
Let
be defined by
where
is the solution to (
29). Thus, the nonlinear programming problem is given by
where
solves (
33). Next we assume that
is generated by the least square function:
where
is the matrix representing the restriction mapping of
onto
Finally, the vector
is given, where
,
where the points
are such that
For numerical realization of (
35) the nonlinear conjugate gradient method will be used—see [
16], with a suitable step size. For this purpose we need the gradient of
, which can be computed by using the adjoint state technique. For more details, see [
9]. The nonlinear Equation (
33) will be solved by using Newton’s method.
6. Numerical Examples
In this section numerical realization of the studied identification problem is presented. We consider the Gao beam model with the boundary conditions (B1) and with the following input data: half-thickness
, width
and length
. Further,
is the constant vertical load applied on the entire beam. We use two the axial forces
N and
N in the numerical example. The beam is split into two intervals,
and
—i.e.,
, such that each interval is characterized by the different material constants
,
. The vector
representing the measured data is given for positive axial load by:
and for negative axial load by:
at the points
These vectors
z were determined in the following way. For material parameters
,
and corresponding axial load, we computed the values of deflection of the beam at the given points and to these values we added the white noise from standard normal distribution.
The admissible set
is defined by the following input parameters:
. Taking into account the data, the condition (A3)’—i.e.,
—has to be satisfied. From the definition of
we have
Therefore, the axial forces
N and
N guarantee the existence and uniqueness of the solution to the state problem. For the construction of
we used the equidistant mesh
The nonlinear mathematical programming problem has been solved by our implementation of the nonlinear conjugate gradient method—see [
16]. The stopping criterion is taken as the combination of the relative error of gradient and the relative error of the cost functional. The initial approximation is
—i.e., on the first interval
is
and on the second
is
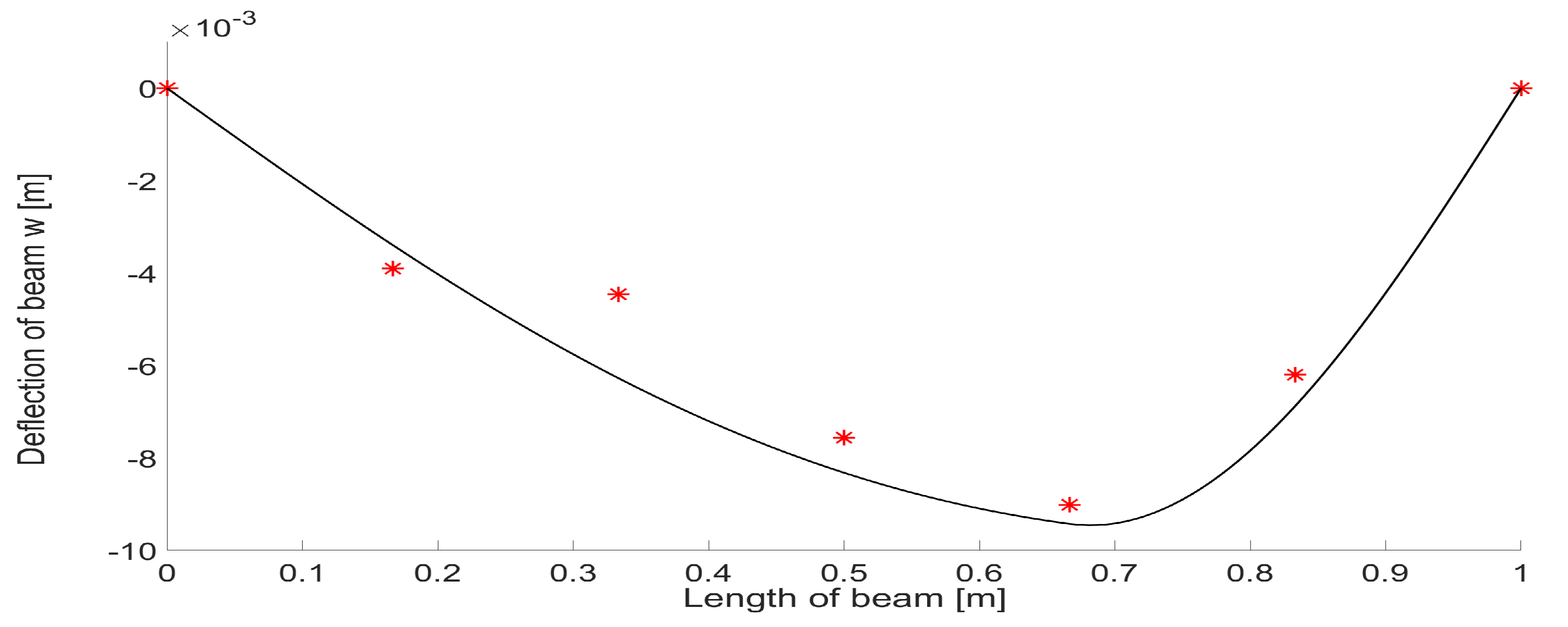
The numerical results are summarized in
Table 1 where
denotes the total number of iterations of the nonlinear conjugate gradient method. The deflection for computed material parameters
is shown in
Figure 2 and
Figure 3.
Numerical computations were realized by Matlab.
7. Conclusions
In the theoretical part of the paper, we analyzed the identification problem for the Gao beam model. Firstly, the Gao beam equation was introduced. Further, the identification Young’s modulus and Poisson ratio, was formulated as an optimal control problem. Next, the existence theorem for simply supported beam was presented together with continuous dependence of the solution to the state problem on material parameters. Moreover, the discretization and convergence analysis of the studied identification problem was discussed. The theoretical results were completed by the numerical example.
Future research will be extended to more general cases, namely to an identification problem for the nonlinear Gao beam model supported by an elastic deformable foundation.






{kind=link}
{kind=link}
{kind=link}