New Improvement of the Domain of Parameters for Newton’s Method



 ,
,  , and
, and 
{kind=link}
Abstract
1. Introduction
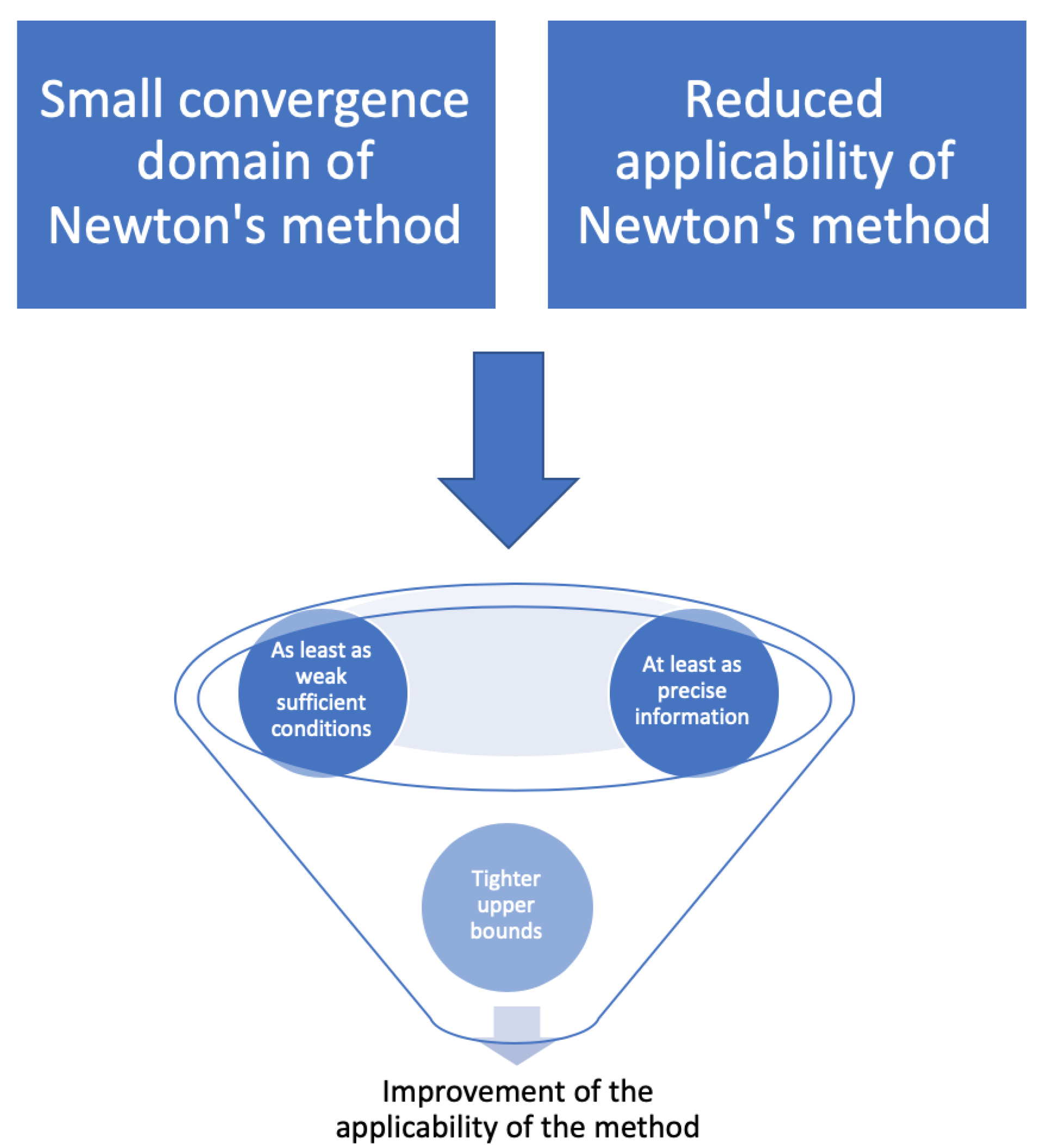
- At least as weak sufficient semi-local and local convergence criteria (leading to more initial points)
- Tighter upper bounds on the distances and (leading to fewer iterations to obtain a predetermine accuracy)
- At least as precise information on the location of the solution.
2. Convergence Analysis
- (a)
- Given and , we considered , then .
- (b)
- Given , then condition equality is fulfilled. If γ is given by , then again , since we have that .
- (c)
- Then, we have thatandTherefore, we get thatandonly if , , and . The reciprocal is given.Note also that the new major sequences are more accurate than the corresponding previous sequences. As an example, the majority sequences , defined by Newton’s method, corresponding to criteria and , are given as:Then, using mathematical induction, it immediately follows that:andIf , strict inequality remains with in the first inequality and for in the second case. Furthermore, it is clear that . Therefore, the location information of the solution beats the previous information. Similarly, there are corresponding improved sequences to the other “h” and “” conditions. Finally, it should be taken into account that the majorizing sequences corresponding to the conditions (5)–(7) have already been proven to be more precise than the sequence corresponding to condition (4).
- (d)
- If for some , then δ can b chosen so that for .
- (e)
- We have thatandTherefore, we get thatMoreover, if or , then . The corresponding error limits are also improved, since we haveIt should be noted that, if , then Theorem 2.8 reduces to the corresponding by Rheinboldt [20] and Traub [21]. The radius found independently by these authors is given byHowever, if , then our radius is such thatandTherefore, our convergence radius ϱ can be at most three times greater than .
3. Numerical Examples
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Kantorovich, L.V.; Akilov, G. Functional Analysis; Pergamon Press: Oxford, UK, 1982. [Google Scholar]
- Amat, S.; Busquier, S.; Bermúdez, C.; Magreñán, Á.A. On a two-step relaxed Newton-type method. Appl. Math. Comput. 2013, 219, 11341–11347. [Google Scholar] [CrossRef]
- Amat, S.; Magreñán, Á.A.; Romero, N. On the election of the damped parameter of a two-step relaxed Newton-type method. Nonlinear Dyn. 2016, 84, 9–18. [Google Scholar] [CrossRef]
- Argyros, I.K.; González, D.; Magreñán, Á.A. A Semilocal Convergence for a Uniparametric Family of Efficient Secant-Like Methods. J. Funct. Spaces 2014, 2014, 467980. [Google Scholar] [CrossRef]
- Argyros, I.K. Convergence and Application of Newton–Type Iterations; Springer: Berlin/Heidelberg, Germany, 2008. [Google Scholar]
- Argyros, I.K.; Hilout, S. Numerical Methods in Nonlinear Analysis; World Scientific Publishing: Hackensack, NJ, USA, 2013. [Google Scholar]
- Argyros, I.K.; Hilout, S. Weaker conditions for the convergence of Newton’s method. J. Complex. 2012, 28, 364–387. [Google Scholar] [CrossRef]
- Argyros, I.K.; Hilout, S. On an improved convergence analysis of Newton’s method. Appl. Mah. Comput. 2013, 225, 372–386. [Google Scholar] [CrossRef]
- Argyros, I.K.; Magreñán, Á.A. Iterative Methods and Their Dynamics with Applications: A Contemporary Study; CRC Press: Boca Ratón, FL, USA, 2017. [Google Scholar]
- Argyros, I.K.; Magreñán, Á.A.; Orcos, L.; Sarría, Í. Unified local convergence for Newton’s method and uniqueness of the solution of equations under generalized conditions in a Banach space. Mathematics 2019, 7, 463. [Google Scholar] [CrossRef]
- Argyros, I.K.; Magreñán, Á.A.; Orcos, L.; Sarría, Í. Advances in the semilocal convergence of Newton’s method with real-world applications. Mathematics 2019, 7, 299. [Google Scholar] [CrossRef]
- Cordero, A.; Gutiérrez, J.M.; Magreñán, Á.A.; Torregrosa, J.R. Stability analysis of a parametric family of iterative methods for solving nonlinear models. Appl. Math. Comput. 2016, 285, 26–40. [Google Scholar] [CrossRef]
- Kou, J.; Wang, B. semi-local convergence of a modified multi–point Jarratt method in Banach spaces under general continuity conditions. Numer. Algorithms 2012, 60, 369–390. [Google Scholar]
- Lotfi, T.; Magreñán, Á.A.; Mahdiani, K.; Rainer, J.J. A variant of Steffensen-King’s type family with accelerated sixth-order convergence and high efficiency index: Dynamic study and approach. Appl. Math. Comput. 2015, 252, 347–353. [Google Scholar] [CrossRef]
- Magreñán, Á.A. Different anomalies in a Jarratt family of iterative root-finding methods. Appl. Math. Comput. 2014, 233, 29–38. [Google Scholar]
- Magreñán, Á.A.; Argyros, I.K. A new tool to study real dynamics: The convergence plane. Appl. Math. Comput. 2014, 248, 215–224. [Google Scholar] [CrossRef]
- Magreñán, Á.A. On the local convergence and the dynamics of Chebyshev-Halley methods with six and eight order of convergence. J. Comput. Appl. Math. 2016, 298, 236–251. [Google Scholar] [CrossRef]
- Magreñán, Á.A.; Gutiérrez, J.M. Real dynamics for damped Newton’s method applied to cubic polynomials. J. Comput. Appl. Math. 2015, 275, 527–538. [Google Scholar] [CrossRef]
- Ren, H.; Argyros, I.K. Convergence radius of the modified Newton method for multiple zeros under Hölder continuous derivative. Appl. Math. Comput. 2010, 217, 612–621. [Google Scholar] [CrossRef]
- Rheinboldt, W.C. An Adaptive Continuation Process for Solving Systems of Nonlinear Equations; Banach Center Publications, Polish Academy of Science: Warszawa, Poland, 1978; Volume 3, pp. 129–142. [Google Scholar]
- Traub, J.F. Iterative Methods for the Solution of Equations; Series in Automatic Computation; Prentice–Hall: Englewood Cliffs, NJ, USA, 1964. [Google Scholar]
- Burrows, A.; Lockwood, M.; Borowczak, M.; Janak, E.; Barber, B. Integrated STEM: Focus on Informal Education and Community Collaboration through Engineering. Edu. Sci. 2018, 8, 4. [Google Scholar] [CrossRef]
- Nakakoji, Y.; Wilson, R. First-Year Mathematics and Its Application to Science: Evidence of Transfer of Learning to Physics and Engineering. Edu. Sci. 2018, 8, 8. [Google Scholar] [CrossRef]
- Prieto, M.C.; Palma, L.O.; Tobías, P.J.B.; León, F.J.M. Student assessment of the use of Kahoot in the learning process of science and mathematics. Edu. Sci. 2019, 9, 55. [Google Scholar] [CrossRef]
- Dejam, M. Advective-diffusive-reactive solute transport due to non-Newtonian fluid flows in a fracture surrounded by a tight porous medium. Int. J. Heat Mass Transf. 2019, 128, 1307–1321. [Google Scholar] [CrossRef]
- Jordán, C.; Magreñán, Á.A.; Orcos, L. Considerations about flip education in the teaching of advanced mathematics. Edu. Sci. 2019, 9, 227. [Google Scholar] [CrossRef]
- Kou, Z.; Dejam, M. Dispersion due to combined pressure-driven and electro-osmotic flows in a channel surrounded by a permeable porous medium. Phys. Fluids 2019, 31, 056603. [Google Scholar] [CrossRef]

© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Amorós, C.; Argyros, I.K.; González, D.; Magreñán, Á.A.; Regmi, S.; Sarría, Í. New Improvement of the Domain of Parameters for Newton’s Method. Mathematics 2020, 8, 103. https://doi.org/10.3390/math8010103
Amorós C, Argyros IK, González D, Magreñán ÁA, Regmi S, Sarría Í. New Improvement of the Domain of Parameters for Newton’s Method. Mathematics. 2020; 8(1):103. https://doi.org/10.3390/math8010103
Chicago/Turabian StyleAmorós, Cristina, Ioannis K. Argyros, Daniel González, Ángel Alberto Magreñán, Samundra Regmi, and Íñigo Sarría. 2020. "New Improvement of the Domain of Parameters for Newton’s Method" Mathematics 8, no. 1: 103. https://doi.org/10.3390/math8010103
APA StyleAmorós, C., Argyros, I. K., González, D., Magreñán, Á. A., Regmi, S., & Sarría, Í. (2020). New Improvement of the Domain of Parameters for Newton’s Method. Mathematics, 8(1), 103. https://doi.org/10.3390/math8010103