A Seventh-Order Scheme for Computing the Generalized Drazin Inverse



{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- ,
- ,
- .
2. Derivation of an Efficient Formulation
3. Seventh Rate of Convergence
- (i)
- if and only if ,
- (ii)
- if and only if .
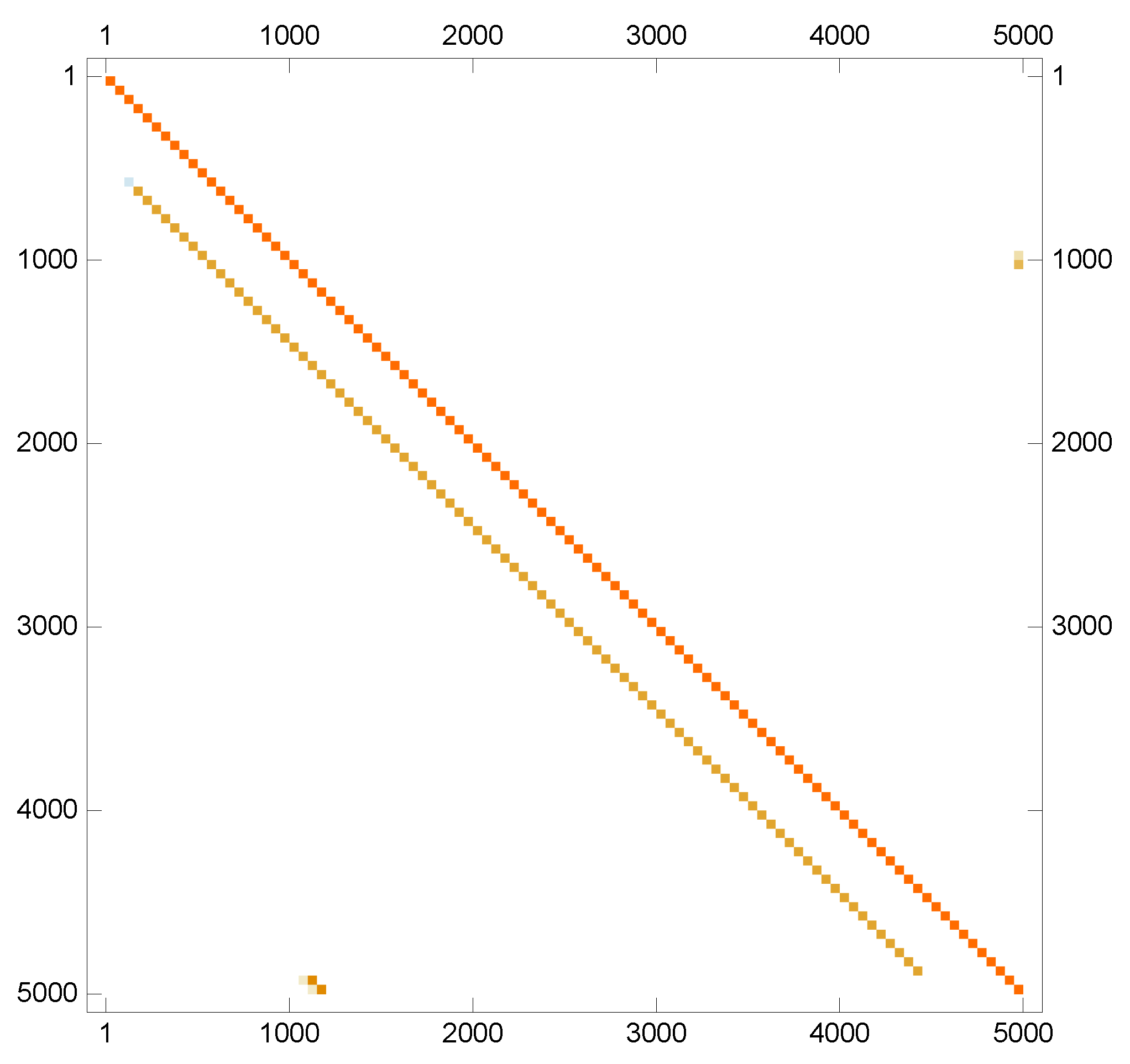
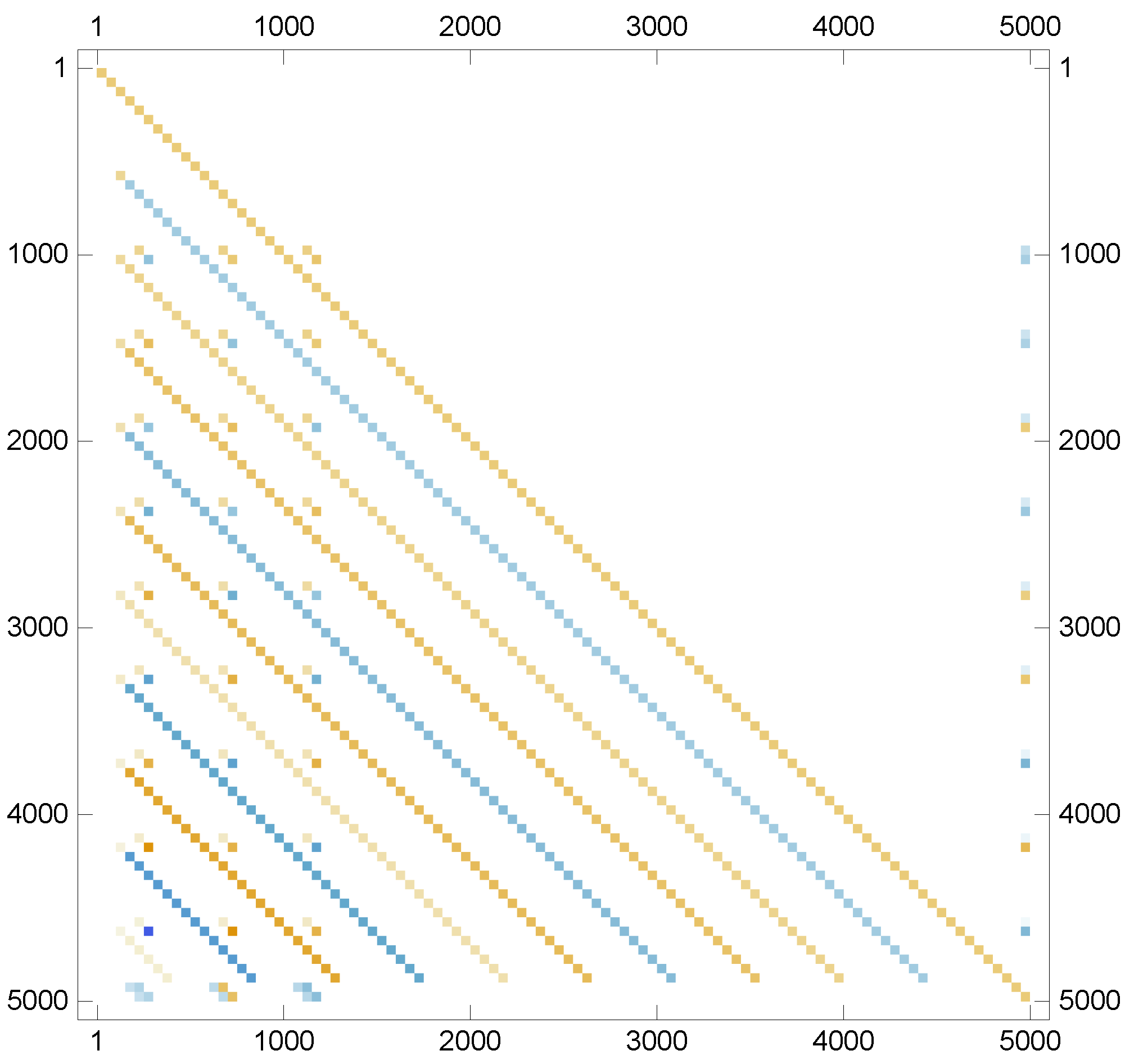
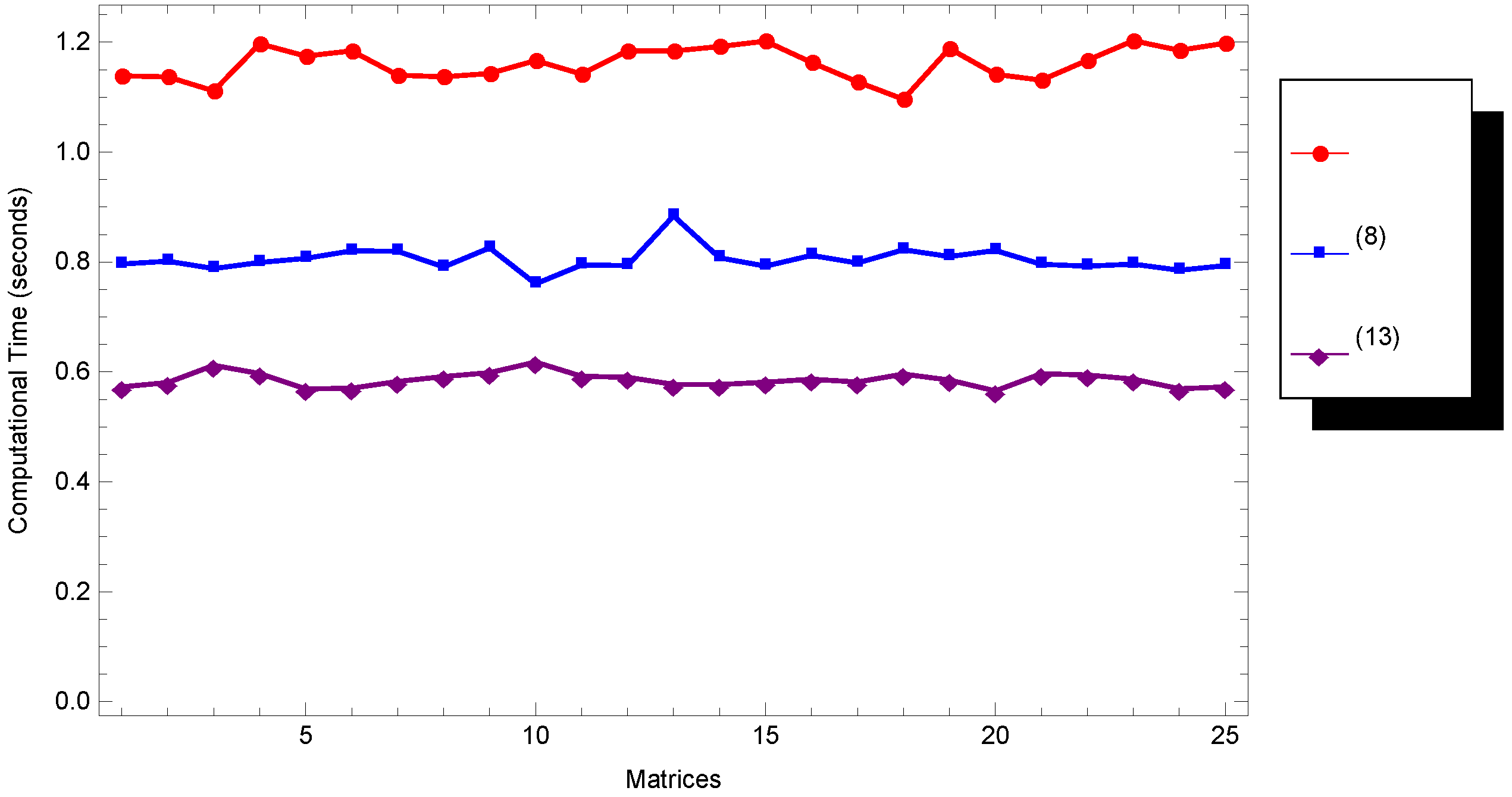
4. Computational Tests
N = 5000; no = 25;
ParallelTable[
A[j] = SparseArray[
{Band[{-100, 1100}] -> RandomReal[20], Band[{1, 1}] -> 2.,
Band[{1000, -50}, {N - 20, N - 25}] -> {2.8, RandomReal[] + I},
Band[{600, 150}, {N - 100, N - 400}] -> {-RandomReal[3], 3. + 3 I}
},
{N, N}, 0.],
{j, no}
];
For[j = 1, j <= number, j++,
{
X = A[j]/(Norm[A[j], "Frobenius"]^2);
k = 1;
X1 = 20 X;
Time[j] = Part[
While[k <= 75 && N[Norm[X - X1, 1]] >= 10^(-6),
X1 = SparseArray[X];
XX = Id - A[j].X1;
X2 = XX.XX;
X =
Chop@
SparseArray[
X1.(Id + (XX + X2).(Id - XX + X2).(Id + XX + X2))];
k++]; // AbsoluteTiming,
1];
}];
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Drazin, M.P. Pseudoinverses in associative rings and semigroups. Am. Math. Mon. 1958, 65, 506–514. [Google Scholar] [CrossRef]
- Wilkinson, J.H. Note on the Practical Significance of the Drazin Inverse; Campbell, S.L., Ed.; Recent Applications of Generalized Inverses, Pitman Advanced Publishing Program, Research Notes in Mathematics, No. 66, Boston; NASA: Washington, DC, USA, 1982; pp. 82–99.
- Kyrchei, I. Explicit formulas for determinantal representations of the Drazin inverse solutions of some matrix and differential matrix equations. Appl. Math. Comput. 2013, 219, 7632–7644. [Google Scholar] [CrossRef] [Green Version]
- Liu, X.; Zhu, G.; Zhou, G.; Yu, Y. An analog of the adjugate matrix for the outer inverse . Math. Prob. Eng. 2012, 2012, 591256. [Google Scholar]
- Moghani, Z.N.; Khanehgir, M.; Karizaki, M.M. Explicit solution to the operator equation AD + FX*B = C over Hilbert C*-modules. J. Math. Anal. 2019, 10, 52–64. [Google Scholar]
- Ben-Israel, A.; Greville, T.N.E. Generalized Inverses: Theory and Applications, 2nd ed.; Springer: New York, NY, USA, 2003. [Google Scholar]
- Wei, Y. Index splitting for the Drazin inverse and the singular linear system. Appl. Math. Comput. 1998, 95, 115–124. [Google Scholar] [CrossRef]
- Ma, H.; Li, N.; Stanimirović, P.S.; Katsikis, V.N. Perturbation theory for Moore–Penrose inverse of tensor via Einstein product. Comput. Appl. Math. 2019, 38, 111. [Google Scholar] [CrossRef]
- Soleimani, F.; Soleymani, F.; Shateyi, S. Some iterative methods free from derivatives and their basins of attraction. Discret. Dyn. Nat. Soc. 2013, 2013, 301718. [Google Scholar] [CrossRef]
- Soleymani, F. Efficient optimal eighth-order derivative-free methods for nonlinear equations. Jpn. J. Ind. Appl. Math. 2013, 30, 287–306. [Google Scholar] [CrossRef]
- Pan, V.Y. Structured Matrices and Polynomials: Unified Superfast Algorithms; BirkhWauser: Boston, MA, USA; Springer: New York, NY, USA, 2001. [Google Scholar]
- Li, X.; Wei, Y. Iterative methods for the Drazin inverse of a matrix with a complex spectrum. Appl. Math. Comput. 2004, 147, 855–862. [Google Scholar] [CrossRef]
- Stanimirović, P.S.; Ciric, M.; Stojanović, I.; Gerontitis, D. Conditions for existence, representations, and computation of matrix generalized inverses. Complexity 2017, 2017, 6429725. [Google Scholar] [CrossRef]
- Schulz, G. Iterative Berechnung der Reziproken matrix. Z. Angew. Math. Mech. 1933, 13, 57–59. [Google Scholar] [CrossRef]
- Li, H.-B.; Huang, T.-Z.; Zhang, Y.; Liu, X.-P.; Gu, T.-X. Chebyshev-type methods and preconditioning techniques. Appl. Math. Comput. 2011, 218, 260–270. [Google Scholar] [CrossRef]
- Krishnamurthy, E.V.; Sen, S.K. Numerical Algorithms: Computations in Science and Engineering; Affiliated East-West Press: New Delhi, India, 1986. [Google Scholar]
- Ma, J.; Gao, F.; Li, Y. An efficient method to compute different types of generalized inverses based on linear transformation. Appl. Math. Comput. 2019, 349, 367–380. [Google Scholar] [CrossRef]
- Soleymani, F.; Stanimirović, P.S.; Khaksar Haghani, F. On Hyperpower family of iterations for computing outer inverses possessing high efficiencies. Linear Algebra Appl. 2015, 484, 477–495. [Google Scholar] [CrossRef]
- Qin, Y.; Liu, X.; Benítez, J. Some results on the symmetric representation of the generalized Drazin inverse in a Banach algebra. Symmetry 2019, 11, 105. [Google Scholar] [CrossRef]
- Wang, G.; Wei, Y.; Qiao, S. Generalized Inverses: Theory and Computations; Science Press: Beijing, China; New York, NY, USA, 2004. [Google Scholar]
- Xiong, Z.; Liu, Z. The forward order law for least Squareg-inverse of multiple matrix products. Mathematics 2019, 7, 277. [Google Scholar] [CrossRef]
- Zhao, L. The expression of the Drazin Inverse with rank constraints. J. Appl. Math. 2012, 2012, 390592. [Google Scholar] [CrossRef]
- Sen, S.K.; Prabhu, S.S. Optimal iterative schemes for computing Moore-Penrose matrix inverse. Int. J. Syst. Sci. 1976, 8, 748–753. [Google Scholar] [CrossRef]
- Soleymani, F. An efficient and stable Newton–type iterative method for computing generalized inverse . Numer. Algorithms 2015, 69, 569–578. [Google Scholar] [CrossRef]
- Ostrowski, A.M. Sur quelques transformations de la serie de LiouvilleNewman. C.R. Acad. Sci. Paris 1938, 206, 1345–1347. [Google Scholar]
- Jebreen, H.B.; Chalco-Cano, Y. An improved computationally efficient method for finding the Drazin inverse. Discret. Dyn. Nat. Soc. 2018, 2018, 6758302. [Google Scholar] [CrossRef]
- Sánchez León, J.G. Mathematica Beyond Mathematics: The Wolfram Language in the Real World; Taylor & Francis Group: Boca Raton, FL, USA, 2017. [Google Scholar]
- Wagon, S. Mathematica in Action, 3rd ed.; Springer: Berlin, Germany, 2010. [Google Scholar]
- Soleymani, F. Efficient semi-discretization techniques for pricing European and American basket options. Comput. Econ. 2019, 53, 1487–1508. [Google Scholar] [CrossRef]
- Soleymani, F.; Barfeie, M. Pricing options under stochastic volatility jump model: A stable adaptive scheme. Appl. Numer. Math. 2019, 145, 69–89. [Google Scholar] [CrossRef]



© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ahmed, D.; Hama, M.; Jwamer, K.H.F.; Shateyi, S. A Seventh-Order Scheme for Computing the Generalized Drazin Inverse. Mathematics 2019, 7, 622. https://doi.org/10.3390/math7070622
Ahmed D, Hama M, Jwamer KHF, Shateyi S. A Seventh-Order Scheme for Computing the Generalized Drazin Inverse. Mathematics. 2019; 7(7):622. https://doi.org/10.3390/math7070622
Chicago/Turabian StyleAhmed, Dilan, Mudhafar Hama, Karwan Hama Faraj Jwamer, and Stanford Shateyi. 2019. "A Seventh-Order Scheme for Computing the Generalized Drazin Inverse" Mathematics 7, no. 7: 622. https://doi.org/10.3390/math7070622
APA StyleAhmed, D., Hama, M., Jwamer, K. H. F., & Shateyi, S. (2019). A Seventh-Order Scheme for Computing the Generalized Drazin Inverse. Mathematics, 7(7), 622. https://doi.org/10.3390/math7070622