Abstract
In this article, an inverse problem with regards to the Laplace equation with non-homogeneous Neumann boundary conditions in a three-dimensional case is investigated. To deal with this problem, a regularization method (mollification method) with the bivariate de la Vallée Poussin kernel is proposed. Stable estimates are obtained under a priori bound assumptions and an appropriate choice of the regularization parameter. The error estimates indicate that the solution of the approximation continuously depends on the noisy data. Two experiments are presented, in order to validate the proposed method in terms of accuracy, convergence, stability, and efficiency.
Keywords:
three-dimensional Laplace equation; ill-posed; de la Vallée Poussin kernel; mollification method; regular parameter; error estimate MSC:
26D15; 31A25; 31B20; 31B35; 65N21
1. Introduction
The inverse problem of the Laplace equation appears in many engineering and physical areas, such as geophysics, cardiology, seismology, and so on [1,2,3]. It has been widely recognized that the inverse problem for the Laplace equation has a central position in all Cauchy problems of elliptic partial differential equations. The inverse problem of the Laplace equation is seriously ill-posed, where a tiny deviation in the data can cause a large error in the solution [4]. It is difficult to develop numerical solutions with conventional methods. Some different methods have been researched, such as the quasi-reversibility [5], Tikhonov regularization [6], wavelet [7], conjugate gradient [8], central difference [9], Fourier regularization [10], and mollification [11,12,13] methods.
The main procedure of the mollification method is using the kernel function to construct a mollification operator by convolution with the measurement data. Manselli, Miller [14], and Murio [15,16] constructed mollification operators by using the Weierstrass kernel to solve some inverse heat conduction problems (IHCP). There have been reports on using the Gaussian kernel to solve the Cauchy problem of elliptic equations [17,18,19,20,21]. Hào [22,23,24] adopted the Dirichlet kernel and de la Vallée Poussin kernel to solve some kinds of two-dimensional equations; including the two-dimensional Laplace equation. However, the three-dimensional case was not considered, Moreover, the analysis method used for error estimate was does not generalize to the three-dimensional case well.
Our primary interest is to solve the inverse problem of the three-dimensional Laplace equation with non-homogeneous Neumann boundary conditions. In order to guarantee solvability for the inverse problem provided, a regularization method using the bivariate de la Vallée Poussin kernel is presented.
This paper is organized as follows: In Section 2, the mathematical problem for the three-dimensional Laplace equation and its ill-posedness are illustrated. In Section 3, we introduce the bivariate de la Vallée Poussin kernel and its properties, following which our mollification regularization method is proposed. In Section 4, some stability estimate results are given, in the interior and at the boundary , under a priori assumptions. The numerical aspect of our proposed method is showed in Section 5. Concluding remarks are given in Section 6.
2. Mathematical Problem and the Ill-Posedness Analysis
We give thought to the following inverse problem of the three-dimensional Laplace equation with non-homogeneous Neumann boundary conditions:
where is three-dimensional Laplace operator; and , are given vectors in . The solution will be determined by the noisy data and in that satisfy:
were denotes the error level, and denotes the norm [1].
Note that the solution of the problem (1) is the sum of the solutions for the following two problems:
and
Therefore, in order to simplify the process of the Cauchy problem (1), we only need to solve problems (3) and (4), respectively.
For , the Fourier transform for a variable is defined by
where and .
The inverse Fourier transform for a variable is defined by
The Parseval equality [16] is as follows:
The solution of problem (6) is
Or
The solution of problem (7) is
Or
3. Mollification Method and Regularization Solution
3.1. Mollification Operator
The bivariate de la Vallée Poussin kernel [22] function is defined by:
where is called the mollification radius (or mollification parameter). has the following properties [22]:
- (1)
- is an entire function of exponential type of degree belong to ;
- (2)
- ;
- (3)
- ; and
- (4)
- is the Fourier transform of , satisfying:whereand
For any function and , , we define two-dimensional convolution [22] by
It is well-known that [22]
and
We define the mollification operator by
From (10), we have
3.2. Regularization Approximation Solution
Instead of solving the problems (3) and (4) with the data and , we attempt to re-construct the noisy data and by and , respectively. We obtain the problems, with the re-constructed data, as follows:
and
According to (11) and the properties (2) and (3) of the kernel , we have the following conclusion:
Remark 1.
If and hold, then
4. Parameter Selection and Error Estimates
Lemma 1.
For , the following inequalities hold
- (1)
- (2)
- (3)
- and
- (4)
Proof.
Inequalities (1) and (2) are easy to obtain. From the inequalities
and the Taylor expansion
we can arrive at (3) and (4). ☐
In the next content, we give stability convergence estimates between the exact solution for problems (3) and (4) and the regularization approximate solution of problems (12) and (13) in and at the boundary , respectively. Convergence estimates will be obtained when we choose a suitable regularization parameter .
4.1. Error Estimates in the Interior
The convergence estimates for the proposed regularization method, in the case of , will be given in this section, and we obtain the approximation results as following:
Theorem 1.
Let and be the exact solution and the approximation solution for problem (1) with the exact input data and mollified data, respectively. Assume the a priori bounds and hold. We have the following estimate:
If α is selected as
we have
where E is a finite positive constant.
Proof.
From Parseval’s equality (5) and the properties of double integrals, we have
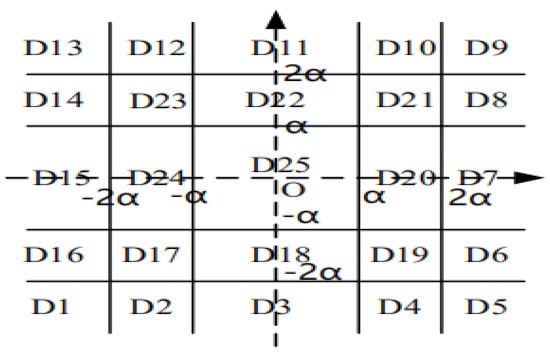
Here, (see Figure 1)
and
Figure 1.
For every
Furthermore,
It is easy to verify that ,
From Minkowski’s inequality, we have
Using a similar analysis, we can obtain the integral estimates of the other .
Utilizing the inequality , we have
According to (1) and (2) of Lemma 1, we obtain
Taking parameter to be , we arrive at (16). ☐
Similarly, the error estimate for problem (4) can be obtained in the following way.
Theorem 2.
Let and be the exact solution and approximation solution for problem (4) with the exact input data and mollified data, respectively. Assume that the a priori bounds and hold, we have
If α is chosen as in (15), then we have
As for our problem (1), combining the results of Theorems 1 and 2 and the Minkowski inequality, we have the error estimate, as follows:
4.2. Error Estimates at the Boundary
The estimates (14), (17), and (19) give no information about the error estimates at , as the constraints and are too weak for this purpose. Therefore, to ensure stability of the solution , at , we need the Sobolev space [1],
where is defined by
If , then .
Theorem 4.
Let and be the exact and regularization solutions, respectively, of problem (3) at . Suppose that the a priori bounds and hold. Then, we have the following inequality
If the regular parameter α is selected as
then we have
where is a positive constant only depending on p.
Proof.
Using the properties of the double integral, and the inequality , we have
Using a similar method as in Theorem 1 and the monotonicity of the function , we obtain
If we chose as and utilize inequality , then (23) can be obtained. ☐
Similar to Theorem 4, the error estimate for problem (4) can be obtained as follows.
Theorem 5.
Let and be the exact and regularization solutions, respectively, for problem (4) at . Suppose that the a priori bounds and hold. Then, we have the following inequality
If the regularization parameter α is chosen as in (22), then
Thus, as for problem (1), using the results of Theorems 4 and 5 and the Minkowski inequality, we have the stable error estimate, as follows:
Theorem 6.
Let and be the exact and regularization solutions, respectively, for problem (1) at . Suppose that condition (2) and hold. We have the convergence estimate, as follows:
If the regularization parameter α is selected as in (22), then
Remark 2.
In this part, we consider the stable error estimates in the cases and , respectively. In the interior, , the a priori bound for is sufficient, and the convergence estimate converges quickly to zero as . However, for the case , although a stronger a priori bound for is imposed, the error estimate is only of logarithmic type, with order .
5. Numerical Examples
We performed two numerical examples to verify the accuracy and stability of our proposed method. Our tests were carried out in the MATLAB R2014b software.
In the numerical examples, we selected the discrete interval to be and the measurement data was obtained as the following
where
The error level is given by
In the following numerical implementations, we need to take the two-dimensional discrete Fourier transform of the data vector and the two-dimensional discrete inverse Fourier transform. We take , , and fix the reconstructed position . The a priori mollification parameter was determined by (15) and (22), where and . We define the relative error between the exact solution u and its approximate solution as:
Example 1.
We chose the function as the exact data for problem (3).
Example 2.
We chose the function as the exact data for problem (4).
We use different perturbation noise levels at the boundary with and , respectively, in Table 1 and Table 2. Note that the results for the relative error at depended on the error level, , and p.

Table 1.
Example 1: Relative Error at , and .
Table 2.
Example 2: Relative Error at , and .
Figure 2 and Figure 3 show the re-constructed solution and exact solution of Example 1, corresponding to noise levels of and , with and , respectively. Figure 4 shows the corresponding error between (a) and (b) in Figure 2 and Figure 3.

Figure 2.
Example 1: , : (a) Exact solution, and (b) approximation solution.

Figure 3.
Example 1: For , : (a) Exact solution, and (b) approximation solution.

Figure 5 and Figure 6 show the regularization solution and exact solution of Example 2, corresponding to noise levels of and with and , respectively. Figure 7 shows the corresponding error between (a) and (b) in Figure 5 and Figure 6.

Figure 5.
Example 2: , : (a) Exact solution, and (b) approximation solution.
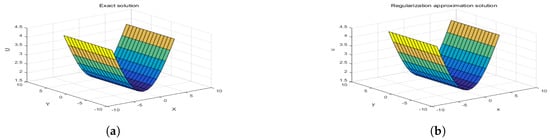
Figure 6.
Example 2: For , : (a) Exact solution, and (b) approximation solution.

In the two examples, we note that the methods which we adopted are stable and effective.
6. Conclusions
In this article, we use a regularization method to solve two Cauchy problems for the three-dimensional Laplace equation. Stable approximate estimates are obtained under a priori bound assumptions and an appropriate choice of the regular parameter. Two numerical examples are investigated to verify the stability of our presented method.
We consider stability error estimates in the cases and , respectively. In the interior, , the convergence estimate is , which quickly converges to zero as . However, at the boundary, , the error estimate is of logarithmic type with order . In future work, we hope to find a new a priori assumption method, in order to obtain an error estimation which achieves better results.
Author Contributions
All authors contributed equally and significantly in writing this article. All authors read and approved the final manuscript.
Funding
Thanks to the National Science Foundation of China (11161036). Thanks to the Natural Science Research Foundation of Ningxia Province, China (NR17260)(NR160117).
Acknowledgments
The authors are deeply indebted to the anonymous referees for their very careful reading and valuable comments and suggestions which immensely improved the previous version of our manuscript.
Conflicts of Interest
The authors declare that they have no competing interests.
References
- Tikhonov, A.N.; Arsenin, V.Y. Solutions of Ill-Posed Problems; Winson: Washington, DC, USA, 1977; pp. 10–80. [Google Scholar]
- Colli-Franzone, P.; Magenes, E. On the inverse potential problem of electrocardiology. Calcolo 1980, 10, 459–538. [Google Scholar]
- Alessandrini, G. Stable determination of a crack from boundary measurements. Proc. R. Soc. Edinb. 1993, 123, 497–516. [Google Scholar] [CrossRef]
- Hadamard, J. Lectures on the Cauchy Problem in Linear Partial Differential Equations; Yale University Press: New Haven, CT, USA, 1923. [Google Scholar]
- Klibanov, M.V.; Santosa, F. A computational quasi-reversibility method for Cauchy problems for Laplace equation. SIAM J. Appl. 1991, 56, 1653–1675. [Google Scholar] [CrossRef]
- Reinhardt, H.J.; Han, H.; Hào, D.N. Stability and regularization of a discrete approximation to the Cauchy problem for Laplace’s equation. SIAM J. Numer. Anal. 1999, 36, 890–905. [Google Scholar] [CrossRef]
- Wang, W.F.; Wang, J.R. Wavelet solution to the three-Dimensional Cauchy problem for Laplace equation. J. Math. 2012, 36, 239–248. [Google Scholar]
- Hào, D.N.; Lesnic, D. The Cauchy problem for Laplace’s equation via the conjugate gradient method. IMA J. Appl. Math. 2000, 65, 199–217. [Google Scholar] [CrossRef]
- Xiong, X.T.; Fu, C.L. Central difference regularization method for the Cauchy problem of the Laplace’s equation. Appl. Math. Comput. 2006, 181, 675–684. [Google Scholar] [CrossRef]
- Fu, C.L.; Li, H.F.; Qian, Z.; Xiong, X.T. Fourier regularization method for solving a Cauchy problem for the Laplace equation. Inverse Probl. Sci. Eng. 2008, 16, 159–169. [Google Scholar] [CrossRef]
- Li, Z.P.; Fu, C.L. A mollification method for a Cauchy problem for the Laplace equation. Appl. Math. Comput. 2011, 217, 9209–9218. [Google Scholar] [CrossRef]
- Ang, D.D.; Nghia, N.H.; Tam, N.C. Regularized solutions of a Cauchy Problem for Laplace Equation in an irregular layer: A three dimensional model. Acta Math. Vietnam. 1998, 23, 65–74. [Google Scholar]
- Cheng, J.; Hon, Y.C.; Wei, T.; Yamamoto, M. Numerical computation of a Cauchy Problem for Laplace’s equation. Zammz. Angew. Math. Mech. 2001, 81, 665–674. [Google Scholar] [CrossRef]
- Manselli, P.; Miller, K. Calculation of the surface temperature and heat flux on one side of a wall from measurements on the opposite side. Ann. Mat. Pura Appl. 1980, 123, 161–183. [Google Scholar] [CrossRef]
- Murio, D.A. Numerical method for inverse transient heat conduction problems. Rev. De La Unión Matemátic Argentina 1981, 30, 25–46. [Google Scholar]
- Murio, D.A. On the estimation of the boundary temperature on a sphere from measurements at its center. J. Comp. Appl. Math. 1982, 8, 111–119. [Google Scholar] [CrossRef]
- Hao, C.; Li, F.X.; Fu, C.L. A mollification regularization method for the Cauchy problem of an elliptic equation in a multi-dimensional case. Inverse Probl. Sci. Eng. 2010, 18, 971–982. [Google Scholar]
- Xiong, X.T.; Shi, W.X.; Fan, X.Y. Two numerical methods for a Cauchy problem for modified Helmholtz equation. Appl. Math. Model. 2011, 35, 4915–4920. [Google Scholar] [CrossRef]
- Yang, F.; Fu, C.L.; Li, X.X. A mollification regularization method for identifying the time-dependent heat source problem. J. Eng. Math. 2016, 100, 67–80. [Google Scholar] [CrossRef]
- Xiong, X.T.; Mao D, L.; Cao, X.X. A mollification method for solving the Cauchy problem for the modified Helmholtz equation. J. Northwest Univ. (Nat. Sci.) 2018, 53, 1–7. [Google Scholar]
- Ern, A.; Guermond, J.L. Mollification in strongly Lipschitz domains with application to continuous and discrete de Rham complexes. Comput. Methods Appl. Math. 2016, 16, 51–75. [Google Scholar] [CrossRef]
- Hào, D.N. A mollification method for ill-posed problems. Numer. Math. 1994, 68, 469–506. [Google Scholar]
- Hào, D.N. A mollification method for a Noncharacteristic Cauchy Problem for a Parabolic Equation. Math. Anal. Appl. 1996, 199, 873–909. [Google Scholar] [CrossRef]
- Hào, D.N.; Hien, P.M.; Sahli, H. Stability results for a Cauchy problem for an elliptic equation. Inverse Probl. 2007, 23, 421–461. [Google Scholar] [CrossRef]
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).