Abstract
Under the hypotheses that a function and its Fréchet derivative satisfy some generalized Newton–Mysovskii conditions, precise estimates on the radii of the convergence balls of Newton’s method, and of the uniqueness ball for the solution of the equations, are given for Banach space-valued operators. Some of the existing results are improved with the advantages of larger convergence region, tighter error estimates on the distances involved, and at-least-as-precise information on the location of the solution. These advantages are obtained using the same functions and Lipschitz constants as in earlier studies. Numerical examples are used to test the theoretical results.
1. Introduction
Let and be Banach spaces. Let and stand, respectively, for the open and closed ball in with center x and radius . Denote by the space of bounded linear operators from into . Further, let be a nonempty set.
In the present paper, we are concerned with the problem of approximating a locally unique solution of the equation
where F is a Fréchet continuously differentiable operator, defined on D with values in .
Numerous applications from applied mathematics, optimization, mathematical biology, chemistry, economics, physics, engineering, and other disciplines can be brought, in the form of Equation (1) by mathematical modelling [1,2,3,4,5,6,7,8,9]. The solution of these equations can rarely be found in closed form. Hence, the solution methods for these equations are iterative. In particular, the practice of numerical analysis for finding such solutions is essentially connected to variants of iterative methods [1,2,3,4,5,6,7,8,9,10,11,12,13,14,15,16,17,18,19,20,21,22,23]. Research about the convergence issues of Newton methods involves two types: Semi-local and local convergence analysis. The semi-local convergence issue is, based on the information around an initial point, to give criteria ensuring the convergence of iterative methods; meanwhile, the local one is, based on the information around a solution, to find estimates for the radii of the convergence balls. We find, in the literature, several studies on the weakness and/or extension of the hypotheses made on the underlying operators. There is a plethora on local, as well as semi-local, convergence results; we refer the reader to [1,2,3,4,5,6,7,8,9,10,11,12,13,14,15,16,17,18,19,20,21,22,23]. In this paper, we assume the existence of , but do not address any existence results.
Newton’s method is defined by the iterative procedure
and is, undoubtedly, one of the most popular iterative processes for generating a sequence approximating . Here, denotes the Fréchet derivative of F at .
Newton–Mysovskii-type conditions (see (10) ) have been used by several authors [4,7,9,12,21,22] to provide a local, as well as a semi-local, convergence for Newton’s method and Newton-like methods.
A very important problem in the study of iterative procedures is the convergence region. Some of the existing results provide conditions for the convergence, based on small regions under certain conditions. Therefore, it is important to enlarge the convergence region without additional hypotheses. Another important problem is to find more precise error estimates on the distance , as well as uniqueness of the solution results. These are our objectives in this paper.
In particular, we obtain the following advantages over earlier works:
- (a1)
- At least as large a radius of convergence to at least as many choices of initial points;
- (a2)
- At least as small a ratio of convergence, so at most as few iterates must be computed to obtain a desired error tolerance; and
- (a3)
- The information on the location of the solution is at least as precise.
It is worth noticing that these advantages are obtained, although more general and flexible majorant-type conditions are used.
Indeed these advantages are obtained by specializing the new majorant functions. Hence, the applicability of Newton’s method is extended. Our approach can be used to improve local and semi-local results for Newton-like methods, secant-type methods, and other single- or multi-step methods along the same lines.
2. Local Convergence Analysis
We present the main local convergence result for Newton’s method.
Theorem 1.
Let be a Fréchet-differentiable operator. Suppose:
- (a)
- There exists such that and for all .
- (b)
- There exists a function with such that is continuous, where , and is non-decreasing for some .
- (c)
- For all
- (d)
- There exists a minimal root of equation , such that
- (e)
Then, the sequence generated for by Newton’s method is well-defined, stays in U for all , and converges to ; which is the only root of the equation in . Moreover, the following estimate holds
where
and .
Proof.
By and , and using (4), we have that
Hence, ; that is, (7) can be obtained for . By mathematical induction, all and decreases monotonically. Moreover, for all , we consequently obtain, from and (7), that
which implies (3). Notice that, as , we have and so . Let with . Replace by in (6)–(8). Then, we have that
and so . However, we showed that . Hence, we conclude that . □
Remark 1.
Estimate generalizes the Newton–Mysovskii-type conditions, already in the literature [4,7,9,12,21,22], of the form
for each , if we choose . However, in this paper, we use the weaker condition
Thus, the function φ specializes to for and . Then, we have , so . Moreover, (10) implies in this case, but not necessarily vice versa. Hence, the new results, in this case, are better than the old ones. It is worth noticing that these improvements are obtained under weaker conditions (see also the numerical examples), since, as , the new radii are larger and the new ratio is smaller.
In the case where is difficult to verify, we have the following alternative.
Theorem 2.
Let be a Fréchet-differentiable operator. Suppose:
- (a)
- There exists an and a function which is continuous and nondecreasing, with , such thatand, for all ,The equationhas a minimal positive root, denoted by . Set .
- (b)
- There exists a function which is continuous and non-decreasing with such that, for all ,
- (c)
- The equationhas a smallest root, .
- (d)
- The function is continuous and nondecreasing on the interval .
- (e)
- .
Then, the sequence generated for by Newton’s method is well-defined, remains in U for all , and converges to , which is the only root of the equation in . Moreover, the following estimates hold
where
Proof.
We have that, for all ,
by , , and the definition of . It follows, from (13) and the Banach Lemma on invertible operators [7,22], that and
Define the function φ on the interval by
Then, the result follows from the proof of Theorem 1, by noticing that
The uniqueness of the solution depends on the functions and w.
Next, we present a uniqueness result, using only the function .
Proposition 3.
Suppose that D is a convex set. Moreover, we assume that
and
for all , where is a continuous and non-decreasing function. Then, the point is the only solution of the equation in .
Proof.
The convergence of Newton’s method to the root has been established in Theorem 2. Let with . Define Using (16), we have
Hence, by (17), . Then, from the identity
we conclude that .□
Remark 2.
- (a)
- If , then, by Theorem 2, we conclude that the root is unique in .
- (b)
- The local results obtained in this study are better than the earlier results in [5,9,17,23,24,25,26], even if specialized.
- (c)
- Case of the Radius Lipschitz condition [9,26]:where is a positive integrable function and .Moreover, in light of (18), there exists a positive integrable function, , such thatNotice thatand is the minimal positive root of the equationThe radius of convergence, , is obtained in [26] under (18), and is given as the root of the equationThe radius of convergence found by us, if is the positive root of the equation, isIn view of (21)–(23), we have thatIndeed, let the functions and be defined asandThen, in light of (21), we getand, for ,by the definition of leading to (24).We can do even better, if . In this case, the function w (i.e., ) depends on (i.e., ), and we have thatwhere L is a positive integrable function.Then, we have thatsince . In general, we do not know which of the functions or L is smaller than the other (see, however, the numerical examples). Then, the radius of convergence is the positive solution of the equationand we have, by (26), thatusing a similar proof as the one below (24). Hence, we have that
- (d)
- Case of Majorant conditions [5,17]:where is a convex, strictly increasing function, with and .Notice that the following functions are convex, strictly increasing functions with , and :
- with ;
- with ; and
- with .
In view of (30), there exists a function with the same properties as , such thatThus, we can chooseThe radius of convergence in [5,17], under (30), is given as the positive root of the equationIn our case, we have that solves the equationFurthermore, by (33),see the proof in [5,17].We can do better, if strictly, and replacing (30) byfor all .Then, chooseThen, the radius is given as the root of the equationOnce more, we have shown that the new results improve the old ones, since (29) holds. - (e)
- We can obtain the radii in explicit form. Indeed, specialize the functions , , and in , and , , and in . Then, we have thatsee the third numerical example.The radius is due to Rheinboldt [23] and Traub [25], whereas is due to Argyros [1].The corresponding error bounds for the radii , , and are given, respectively, byand
- (f)
- The same advantages are obtained if we use Smale-type [25] conditions or those of Ferreira [5] or Wang [26]. Then, we chooseand to be the solution of equationwith and .
It is worth noticing that these advantages are obtained under the same computational cost, as, in practice, the computation of the old functions and requires the computation of the functions , L, , and f as special cases.
3. Numerical Examples
Example 4.
Ammonia Problem [19,27] Let us consider the quartic equation that can describe the fraction (or amount) of nitrogen–hydrogen feed that is turned into ammonia, known as fractional conversion. If the pressure is 250 atmospheres and the temperature reaches a value of 500 Celsius degrees,
the equation is:
We set and . Then,
- (a)
- We obtain:andMoreover, the equationhas a minimal root . On the other hand, the functionis continuous and non-decreasing on the interval . Finally, it is clear that . Then, we can guarantee that the method (2) converges, due to Theorem 2.
- (b)
- We obtain:andMoreover, the equationhas a minimal root . On the other hand, the functionis continuous and non-decreasing on the interval . Finally, it is clear that . Then, we can guarantee that the method (2) converges, due to Theorem 2.
Example 5.
Planck’s Radiation Law Problem [4]
We consider the following problem:
which calculates the energy density within an isothermal blackbody. After some changes of variable, the problem is similar to
Let us define
We define D as the real interval . Then, we obtain:
and
Moreover, the equation
has a minimal solution . On the other hand, the function
is continuous and non-decreasing on the interval . Finally, it is clear that . Then, we can guarantee that the method (2) converges, due to Theorem 2.
Example 6.
Boundary Value Problem
Let for a natural integer , where and are equipped with the max-norm . The corresponding matrix norm is
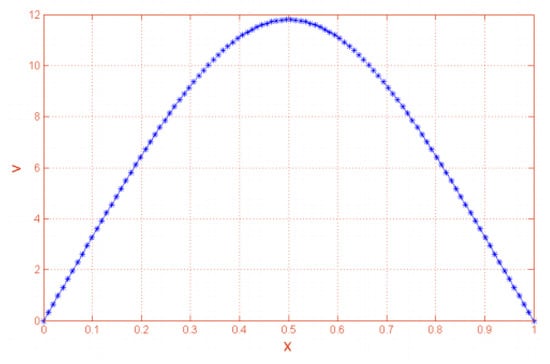
for . On the interval , we consider the following two-point boundary value problem
To discretize the above equation, we divide the interval into n equal parts, with the length of each part being and the coordinate of each point being , for . A second-order finite difference discretization of Equation (46) results in the following set of non-linear equations
where . For the above system of non-linear equations, we provide the Fréchet derivative
Let and . To solve the linear systems (step 1 and step 2 in the method (47)), we employ the MatLab routine “linsolve”, which uses LU factorization with partial pivoting. We define the initial guess to be . Figure 1 plots our numerical solution.
Figure 1.
Solution of the boundary value problem (46).
Example 7.
Radius Comparison Suppose that the motion of an object in three dimensions is governed by the system of differential equations
with for . Then, the solution of the system is given, for , by the function , defined by
Then, for , we have
Notice that (41) holds. Hence, (29) holds as a strict inequality. In particular, we have, from (22), (23), and (27), that
Thus, we have improved the previous results.
4. Conclusions
Generalized Newton–Mysovskii-type majorant convergence results have been introduced in this paper. Special cases of the majorant functions involved lead to conditions considered by other authors [4,7,9,12,21,22]. It turns out that, although the conditions are more general, they are also more flexible, leading to some advantages; moreover, without any additional computational effort. Hence, we have extended the applicability of Newton’s method in cases not covered before. This paper paves the way for future research involving other iterative procedures involving inverses of linear operators.
Author Contributions
All authors have contributed in a similar way.
Funding
This research was supported in part by Programa de Apoyo a la investigación de la fundación Séneca-Agencia de Ciencia y Tecnología de la Región de Murcia 20928/PI/18, by the project PGC2018-095896-B-C21 of the Spanish Ministry of Science and Innovation.
Acknowledgments
We would like to express our gratitude to the reviewers for the constructive criticism of the paper.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Argyros, I.K.; Hilout, S. Weaker conditions for the convergence of Newton’s method. J. Complex. 2012, 28, 364–387. [Google Scholar] [CrossRef]
- Argyros, I.K.; Magreñán, Á.A. On the convergence of an optimal fourth-order family of methods and its dynamics. Appl. Math. Comput. 2015, 252, 336–346. [Google Scholar] [CrossRef]
- Argyros, I.K.; González, D. Local convergence for an improved Jarratt-type method in Banach space. Int. J. Artif. Intell. Interact. Multimed. 2015, 3, 20–25. [Google Scholar] [CrossRef][Green Version]
- Deuflhard, P. Newton Methods for Nonlinear Problems: Affine Invariance and Adaptive Algorithms; Springer: Berlin/Heidelberg, Germany, 2011. [Google Scholar]
- Ferreira, O.P. Local convergence of Newton’s method in Banach space from the viewpoint of the majorant principle. IMA J. Numer. Anal. 2009, 29, 746–759. [Google Scholar] [CrossRef]
- Hernández, M.A.; Salanova, M.A. Modification of the Kantorovich assumptions for semilocal convergence of the Chebyshev method. J. Comput. Appl. Math. 2000, 126, 131–143. [Google Scholar]
- Kantorovich, L.V.; Akilov, G.P. Functional Analysis; Pergamon Press: Oxford, UK, 1982. [Google Scholar]
- Kou, J.S.; Li, Y.T.; Wang, X.H. A modification of Newton method with third-order convergence. Appl. Math. Comput. 2006, 181, 1106–1111. [Google Scholar] [CrossRef]
- Proinov, P.D. General local convergence theory for a class of iterative processes and its applications to Newton’s method. J. Complex. 2009, 25, 38–62. [Google Scholar] [CrossRef]
- Amat, S.; Busquier, S. Third order methods under Kantorovich conditions. J. Math. Anal. Appl. 2007, 336, 243–261. [Google Scholar] [CrossRef]
- Amat, S.; Bermúdez, C.; Busquier, S.; Plaza, S. On a third-order Newton-type method free of bilinear operators. Numer. Linear Algebra Appl. 2010, 17, 639–653. [Google Scholar] [CrossRef]
- Argyros, I.K. Computational Theory of Iterative Methods; Chui, C.K., Wuytack, L., Eds.; Studies in Computational Mathematics; Elsevier Publ. Co.: New York, NY, USA, 2007; Volume 15. [Google Scholar]
- Argyros, I.K. A semilocal convergence analysis for directional Newton methods. Math. Comput. 2011, 80, 327–343. [Google Scholar] [CrossRef]
- Argyros, I.K.; Hilout, S. Computational Methods in Nonlinear Analysis: Efficient Algorithms, Fixed Point Theory and Applications; World Scientific: Singapore, 2013. [Google Scholar]
- Argyros, I.K.; George, S. Ball Convergence for Steffensen-type Fourth-order Methods. Int. J. Artif. Intell. Interact. Multimed. 2015, 3, 37–42. [Google Scholar] [CrossRef][Green Version]
- Ezquerro, J.A.; Hernández, M.A. Recurrence relations for Chebyshev-type methods. Appl. Math. Optim. 2000, 41, 227–236. [Google Scholar] [CrossRef]
- Ezquerro, J.A.; Hernández, M.A. Third-order iterative methods for operators with bounded second derivative. J. Comput. Math. Appl. 1997, 82, 171–183. [Google Scholar]
- Ezquerro, J.A.; Hernández, M.A. On the R-order of the Halley method. J. Math. Anal. Appl. 2005, 303, 591–601. [Google Scholar] [CrossRef]
- Gopalan, V.B.; Seader, J.D. Application of interval Newton’s method to chemical engineering problems. Reliab. Comput. 1995, 1, 215–223. [Google Scholar]
- Gutiérrez, J.A.; Magreñán, Á.A.; Romero, N. On the semilocal convergence of Newton Kantorovich method under center-Lipschitz conditions. Appl. Math. Comput. 2013, 221, 79–88. [Google Scholar]
- Ortega, L.M.; Rheinboldt, W.C. Iterative Solution of Nonlinear Equations in Several Variables; Academic Press: New York, NY, USA, 1970. [Google Scholar]
- Potra, F.A.; Pták, V. Nondiscrete Induction and Iterative Processes; Research Notes in Mathematics; Pitman: Boston, MA, USA, 1984; Volume 103. [Google Scholar]
- Rheinboldt, W.C. An adaptive continuation process for solving systems of nonlinear equations. Banach Cent. Publ. 1977, 3, 129–142. [Google Scholar] [CrossRef]
- Traub, J.F. Iterative Methods for the Solution of Equations; Prentice-Hall Series in Automatic Computation; Prentice-Hall: Englewood Cliffs, NJ, USA, 1964. [Google Scholar]
- Smale, S. Newton’s method estimates from data at one point. In The Merging of Disciplines: New Directions in Pure, Applied, and Computational Mathematics; Springer: New York, NY, USA, 1986; pp. 185–196. [Google Scholar]
- Wang, X. Convergence of Newton’s method and uniqueness of the solution of equations in Banach space. IMA J. Numer. Anal. 2000, 20, 123–134. [Google Scholar] [CrossRef]
- Shacham, M. An improved memory method for the solution of a nonlinear equation. Chem. Eng. Sci. 1989, 44, 1495–1501. [Google Scholar] [CrossRef]

© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).