Convergence Theorems for Common Solutions of Split Variational Inclusion and Systems of Equilibrium Problems


Abstract
:1. Introduction
2. Preliminaries
- (1)
- firmly nonexpansive on D if
- (2)
- Lipschitz continuous with constant on D if
- (3)
- nonexpansive on D if
- (4)
- hemicontinuous if it is continuous along each line segment in D.
- (5)
- averaged if there exist a nonexpansive operator and a number such that
- (1)
- monotone if, for all and ,
- (2)
- maximal monotone if the graph of B,is not properly contained in the graph of any other monotone mapping.
- (3)
- The resolvent of B with parameter is denoted bywhere I is the identity operator.
- (A1)
- for all ;
- (A2)
- for all ;
- (A3)
- For all , for all ;
- (A4)
- For all , is convex and lower semi-continuous.
- (1)
- is nonempty single-valued.
- (2)
- is firmly nonexpansive, that is, for all ,and, further, is nonexpansive.
- (3)
- is closed and convex.
- (a)
- and ;
- (b)
- or .
3. The Main Results
3.1. Iterative Algorithms
| Algorithm 1.Choose a positive sequence satisfying for some small enough. Select arbitrary starting point , set and let , . |
| Iterative Step: For any iterate for each , compute Stop Criterion: If , then stop. Otherwise, set and return to Iterative Step. |
| Algorithm 2.Choose a positive sequence satisfying (for some small enough). Select arbitrary starting point , set and let , . |
| Iterative Step: For any iterate for each , compute Stop Criterion: If , then stop. Otherwise, set and return to Iterative Step. |
| Algorithm 3.Choose a positive sequence satisfying (for some small enough). Select arbitrary starting point , set and let , . |
| Iterative Step: For any iterate for each , compute Stop Criterion: If , then stop. Otherwise, set and return to Iterative Step. |
3.2. Weak Convergence Analysis for Algorithm 1
3.3. Strong Convergence Analysis for Algorithms 2 and 3
4. Applications to Fixed Points and Split Convex Optimization Problems
- (1)
- is a single-valued mapping.
- (2)
- is a nonexpansive mapping.
- (3)
- is closed and convex.
5. Numerical Examples
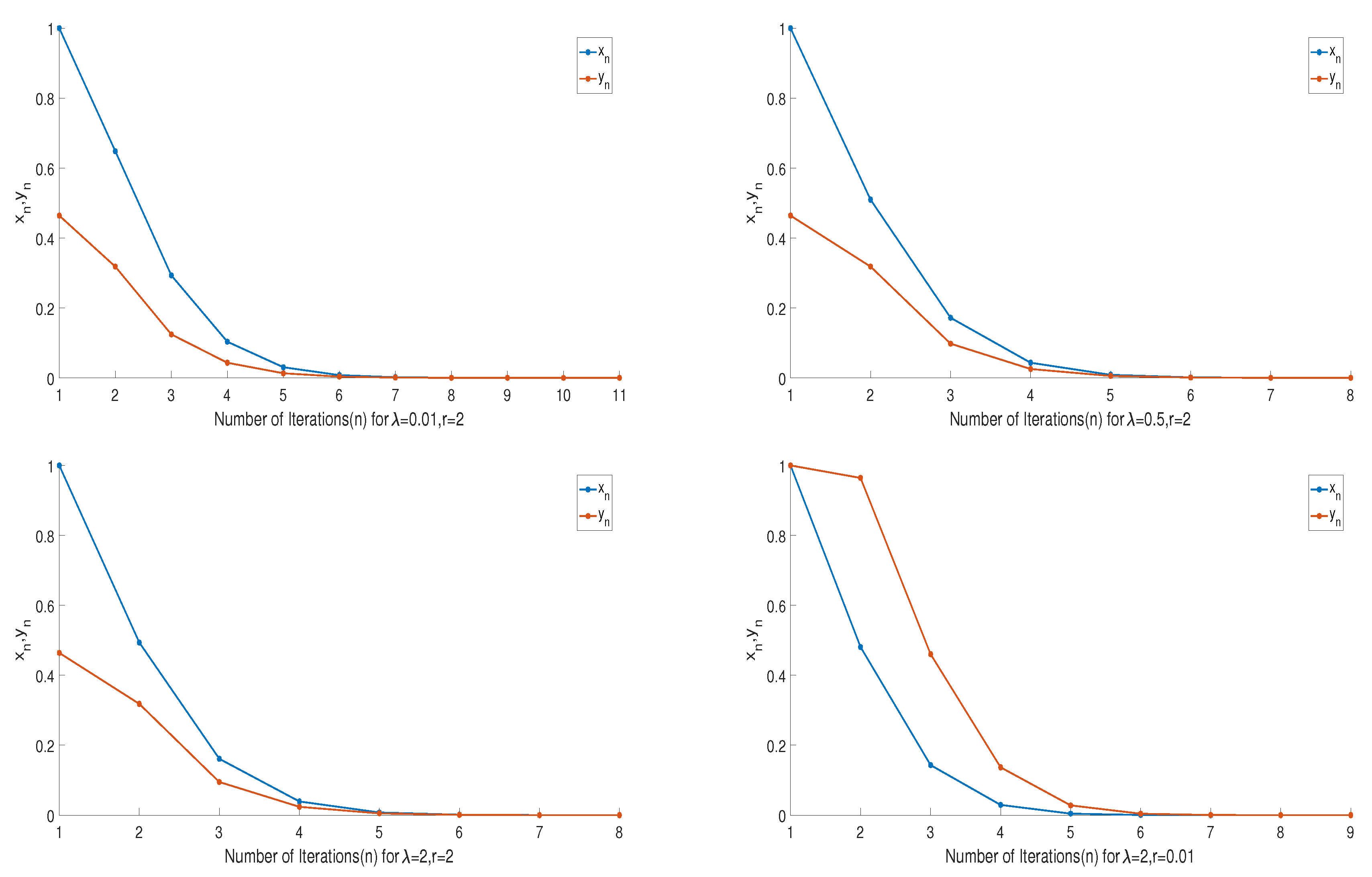
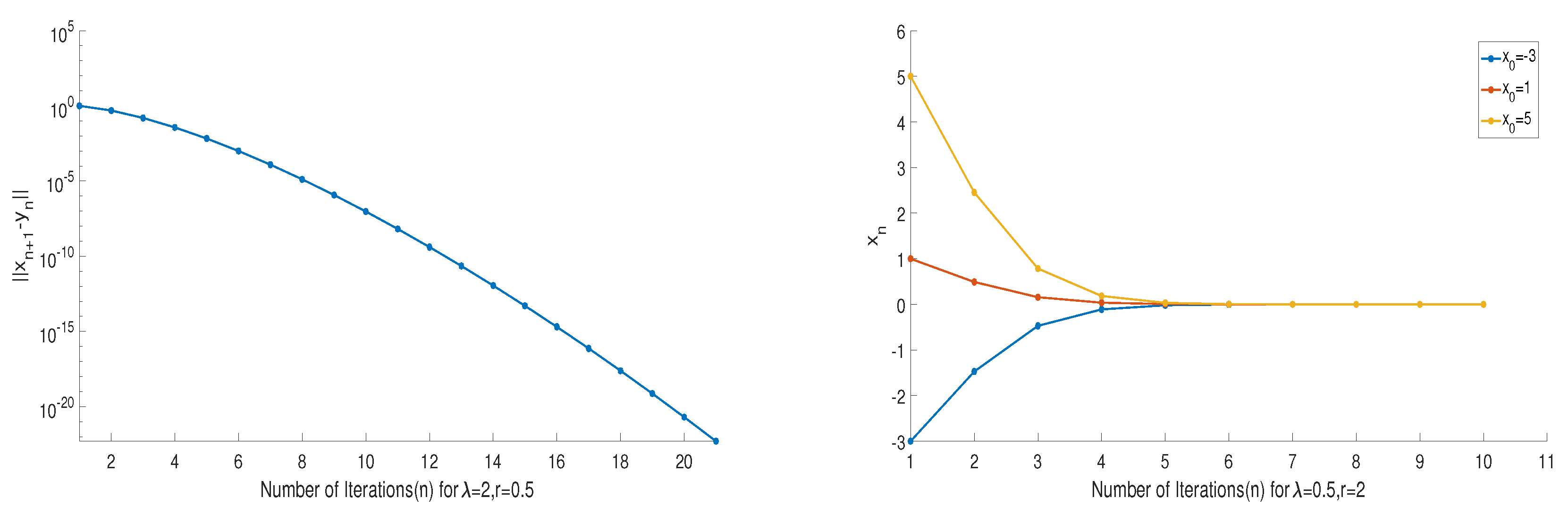
5.1. Numerical Behavior of Algorithm 1
- (1)
- (2)
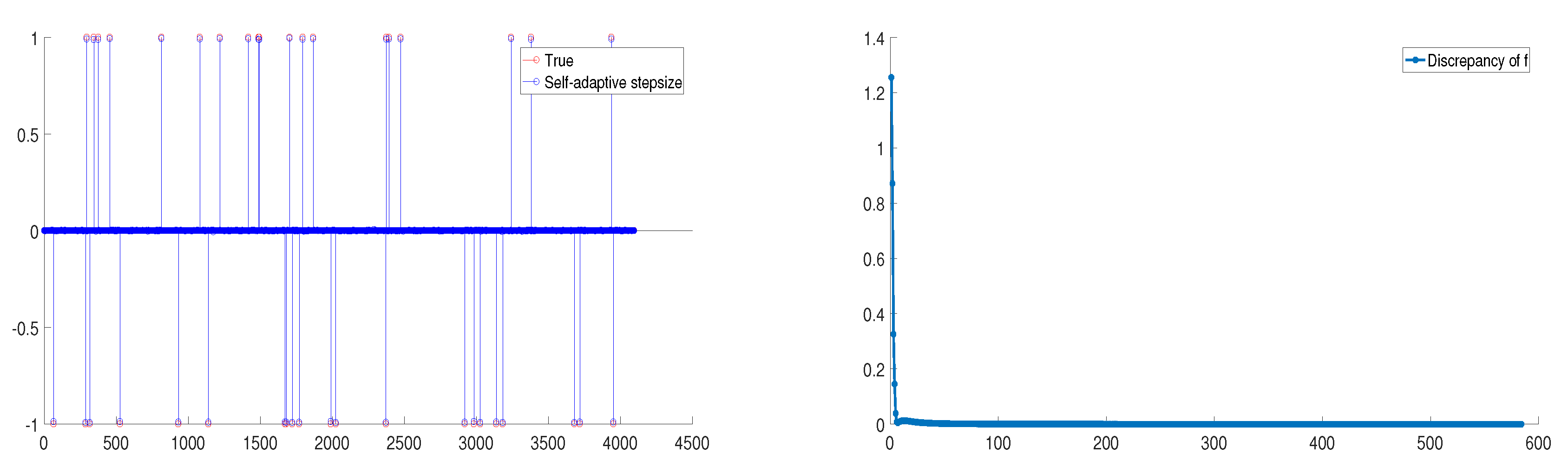
- The convergence rate of Algorithm 1 is fast, efficient, stable and simple to implement. The number of iterations remains almost consistent irrespective of the initial point and parameters .
- (3)
- The error of can be obtain approximately equal to even smaller in 20 iterations.
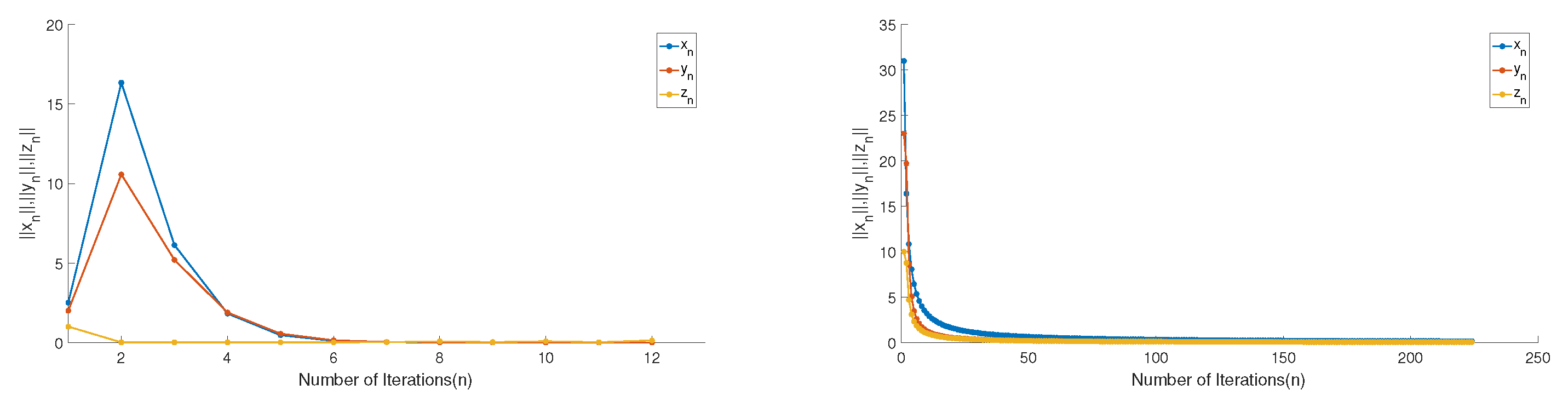
5.2. Numerical Behaviours of Algorithms 2 and 3
5.3. Comparisons with Other Algorithms
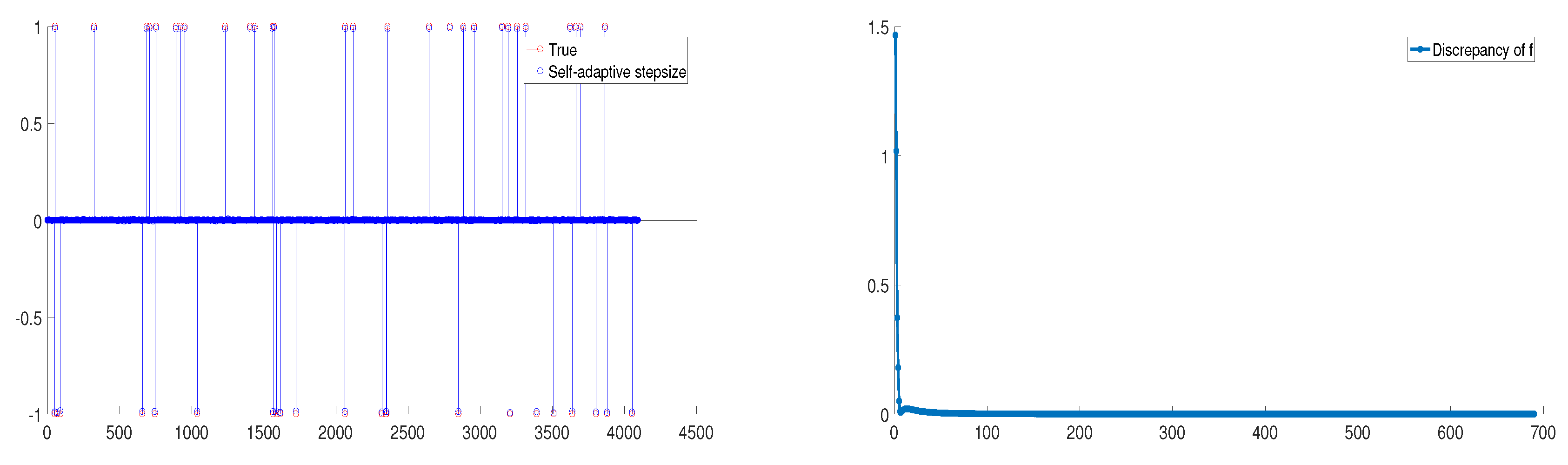
5.4. Compressed Sensing
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Blum, E.; Oettli, W. From optimization and variational inequalities to equilibrium problems. Math. Stud. 1994, 63, 123–145. [Google Scholar]
- Flam, D.S.; Antipin, A.S. Equilibrium programming using proximal-like algorithms. Math. Program. 1997, 78, 29–41. [Google Scholar] [CrossRef]
- Moudafi, A. Second-order differential proximal methods for equilibrium problems. J. Inequal. Pure Appl. Math. 2003, 4, 18. [Google Scholar]
- Bnouhachem, A.; Suliman, A.H.; Ansari, Q.H. An iterative method for common solution of equilibrium problems and hierarchical fixed point problems. Fixed Point Theory Appl. 2014, 2014, 194. [Google Scholar] [CrossRef]
- Konnov, I.V.; Ali, M.S.S. Descent methods for monotone equilibrium problems inBanach spaces. J. Comput. Appl. Math. 2006, 188, 165–179. [Google Scholar] [CrossRef]
- Konnov, I.V.; Pinyagina, O.V. D-gap functions and descent methods for a class of monotone equilibrium problems. Lobachevskii J. Math. 2003, 13, 57–65. [Google Scholar]
- Charitha, C. A Note on D-gap functions for equilibrium problems. Optimization 2013, 62, 211–226. [Google Scholar] [CrossRef]
- Lorenzo, D.D.; Passacantando, M.; Sciandrone, M. A convergent inexact solution method for equilibrium problems. Optim. Methods Softw. 2014, 29, 979–991. [Google Scholar] [CrossRef]
- Ceng, L.C.; Ansari, Q.H.; Yao, J.C. Some iterative methods for finding fixed point and for solving constrained convex minimization problems. Nonlinear Anal. 2011, 74, 5286–5302. [Google Scholar] [CrossRef]
- Yao, Y.; Cho, Y.J.; Liou, Y.C. Iterative algorithm for hierarchical fixed points problems and variational inequalities. Math. Comput. Model. 2010, 52, 1697–1705. [Google Scholar] [CrossRef]
- Yao, Y.; Cho, Y.J.; Liou, Y.C. Algorithms of common solutions for variational inclusions, mixed equilibrium problems and fixed point problems. Eur. J. Oper. Res. 2011, 212, 242–250. [Google Scholar] [CrossRef]
- Yao, Y.H.; Liou, Y.C.; Yao, J.C. New relaxed hybrid-extragradient method for fixed point problems, a general system of variational inequality problems and generalized mixed equilibrium problems. Optimization 2011, 60, 395–412. [Google Scholar] [CrossRef]
- Qin, X.; Chang, S.S.; Cho, Y.J. Iterative methods for generalized equilibrium problems and fixed point problems with applications. Nonlinear Anal. Real World Appl. 2010, 11, 2963–2972. [Google Scholar] [CrossRef]
- Qin, X.; Cho, Y.J.; Kang, S.M. Viscosity approximation methods for generalized equilibrium problems and fixed point problems with applications. Nonlinear Anal. 2010, 72, 99–112. [Google Scholar] [CrossRef]
- Hung, P.G.; Muu, L.D. For an inexact proximal point algorithm to equilibrium problem. Vietnam J. Math. 2012, 40, 255–274. [Google Scholar]
- Quoc, T.D.; Muu, L.D.; Nguyen, V.H. Extragradient algorithms extended to equilibrium problems. Optimization 2008, 57, 749–776. [Google Scholar] [CrossRef]
- Santos, P.; Scheimberg, S. An inexact subgradient algorithm for equilibrium problems. Comput. Appl. Math. 2011, 30, 91–107. [Google Scholar]
- Thuy, L.Q.; Anh, P.K.; Muu, L.D.; Hai, T.N. Novel hybrid methods for pseudomonotone equilibrium problems and common fixed point problems. Numer. Funct. Anal. Optim. 2017, 38, 443–465. [Google Scholar] [CrossRef]
- Rockafellar, R.T. Monotone operators and proximal point algorithm. SAIM J. Control Optim. 1976, 14, 877–898. [Google Scholar] [CrossRef]
- Moudafi, A. From alternating minimization algorithms and systems of variational inequalities to equilibrium problems. Commun. Appl. Nonlinear Anal. 2019, 16, 31–35. [Google Scholar]
- Moudafi, A. Proximal point algorithm extended to equilibrium problem. J. Nat. Geometry 1999, 15, 91–100. [Google Scholar]
- Muu, L.D.; Otelli, W. Convergence of an adaptive penalty scheme for finding constrained equilibria. Nonlinear Anal. 1992, 18, 1159–1166. [Google Scholar] [CrossRef]
- Dong, Q.L.; Tang, Y.C.; Cho, Y.J.; Rassias, T.M. “Optimal” choice of the step length of the projection and contraction methods for solving the split feasibility problem. J. Glob. Optim. 2018, 71, 341–360. [Google Scholar] [CrossRef]
- Censor, Y.; Elfving, T. A multiprojection algorithm using Bregman projections in a product space. Numer. Algorithms 1994, 8, 221–239. [Google Scholar] [CrossRef]
- Ansari, Q.H.; Rehan, A. Split feasibility and fixed point problems. In Nonlinear Analysis, Approximation Theory, Optimization and Applications; Springer: Berlin/Heidelberg, Germany, 2014; pp. 281–322. [Google Scholar]
- Xu, H.K. Iterative algorithms for nonliear operators. J. Lond. Math. Soc. 2002, 66, 240–256. [Google Scholar] [CrossRef]
- Qin, X.; Shang, M.; Su, Y. A general iterative method for equilibrium problems and fixed point problems in Hilbert spaces. Nonlinear Anal. 2008, 69, 3897–3909. [Google Scholar] [CrossRef]
- Ceng, L.C.; Ansari, Q.H.; Yao, J.C. An extragradient method for solving split feasibility and fixed point problems. Comput. Math. Appl. 2012, 64, 633–642. [Google Scholar] [CrossRef]
- Censor, Y.; Bortfeld, T.; Martin, B.; Trofimov, A. A unified approach for inversion problems in intensity modulated radiation therapy. Phys. Med. Biol. 2003, 51, 2353–2365. [Google Scholar] [CrossRef]
- Kazmi, K.R.; Rizvi, S.H. An iterative method for split variational inclusion problem and fixed point problem for a nonexpansive mapping. Optim. Lett. 2014, 8, 1113–1124. [Google Scholar] [CrossRef]
- Censor, Y.; Gibali, A.; Reich, S. Algorithms for the split variational inequality problem. Numer. Algorithms 2012, 59, 301–323. [Google Scholar] [CrossRef]
- Moudafi, A. The split common fixed point problem for demicontractive mappings. Inverse Probl. 2010, 26, 587–600. [Google Scholar] [CrossRef]
- Moudafi, A. Split monotone variational inclusions. J. Optim. Theory Appl. 2011, 150, 275–283. [Google Scholar] [CrossRef]
- Nguyen, T.L.; NShin, Y. Deterministic sensing matrices in compressive sensing: A survey. Sci. World J. 2013, 2013, 1–6. [Google Scholar] [CrossRef]
- Dang, Y.; Gao, Y. The strong convergence of a KM-CQ-like algorithm for a split feasibility problem. Inverse Probl. 2011, 27, 015007. [Google Scholar] [CrossRef]
- Byrne, C.; Censor, Y.; Gibali, A.; Reich, S. Weak and strong convergence of algorithms for the split common null point problem. J. Nonlinear Convex Anal. 2012, 13, 759–775. [Google Scholar]
- Byrne, C. Iterative oblique projection onto convex sets and the split feasibility problem. Inverse Probl. 2002, 18, 441–453. [Google Scholar] [CrossRef]
- Byrne, C. A unified treatment of some iterative algorithms in signal processing and image reconstruction. Inverse Probl. 2004, 20, 103–120. [Google Scholar] [CrossRef]
- Yang, Q. The relaxed CQ algorithm for solving the split feasibility problem. Inverse Probl. 2004, 20, 1261–1266. [Google Scholar] [CrossRef]
- Gibali, A.; Mai, D.T.; Nguyen, T.V. A new relaxed CQ algorithm for solving split feasibility problems in Hilbert spaces and its applications. J. Ind. Manag. Optim. 2018, 2018, 1–25. [Google Scholar]
- López, G.; Martin-Marquez, V.; Xu, H.K. Solving the split feasibility problem without prior knowledge of matrix norms. Inverse Probl. 2012, 28, 085004. [Google Scholar] [CrossRef]
- Moudafi, A.; Thukur, B.S. Solving proximal split feasibility problem without prior knowledge of matrix norms. Optim. Lett. 2013, 8. [Google Scholar] [CrossRef]
- Gibali, A. A new split inverse problem and application to least intensity feasible solutions. Pure Appl. Funct. Anal. 2017, 2, 243–258. [Google Scholar]
- Plubtieng, S.; Sombut, K. Weak convergence theorems for a system of mixed equilibrium problems and nonspreading mappings in a Hilbert space. J. Inequal. Appl. 2010, 2010, 246237. [Google Scholar] [CrossRef]
- Sombut, K.; Plubtieng, S. Weak convergence theorem for finding fixed points and solution of split feasibility and systems of equilibrium problems. Abstr. Appl. Anal. 2013, 2013, 430409. [Google Scholar] [CrossRef]
- Sitthithakerngkiet, K.; Deepho, J.; Martinez-Moreno, J.; Kuman, P. Convergence analysis of a general iterative algorithm for finding a common solution of split variational inclusion and optimization problems. Numer. Algorithms 2018, 79, 801–824. [Google Scholar] [CrossRef]
- Eslamian, M.; Fakhri, A. Split equality monotone variational inclusions and fixed point problem of set-valued operator. Acta Univ. Sapientiaemath. 2017, 9, 94–121. [Google Scholar] [CrossRef]
- Censor, Y.; Segal, A. The split common fixed point problem for directed operators. J. Convex Anal. 2019, 16, 587–600. [Google Scholar]
- Plubtieng, S.; Sriprad, W. A viscosity approximation method for finding common solutions of variational inclusions, equilibrium problems, and fixed point problems in Hilbert spaces. Fixed Point Theory Appl. 2009, 2009, 567147. [Google Scholar] [CrossRef]
- Mainge, P.E. Strong convergence of projected subgradient methods for nonsmooth and nonstrictly convex minimization. Set-Valued Anal. 2008, 16, 899–912. [Google Scholar] [CrossRef]
- Bruck, R.E.; Reich, S. Nonexpansive projections and resolvents of accretive operators in Banach spaces. Houst. J. Math. 1977, 3, 459–470. [Google Scholar]
- Mainge, P.E. Approximation methods for common fixed points of nonexpansive mappings in Hilbert spaces. J. Math. Anal. Appl. 2007, 325, 469–479. [Google Scholar] [CrossRef]
- Osilike, M.O.; Aniagbosor, S.C.; Akuchu, G.B. Fixed point of asymptotically demicontractive mappings in arbitrary Banach spaces. PanAm. Math. J. 2002, 12, 77–88. [Google Scholar]
- Goebel, K.; Kirk, W.A. Topics in Metric Fixed Point Theory; Cambridge University Press: Cambridge, UK, 1990. [Google Scholar]
- Aubin, J.P. Optima and Equilibria: An Introduction to Nonlinear Analysis; Springer: Berlin/Heidelberg, Germany, 1993. [Google Scholar]
- Ishikawa, S. Fixed points and iteration of a nonexpansive mapping in Banach space. Proc. Am. Math. Soc. 1976, 59, 65–71. [Google Scholar] [CrossRef]
- Browder, F.E.; Petryshyn, W.V. The solution by iteration of nonlinear functional equations in Banach spaces. Bull. Am. Math. Soc. 1966, 72, 571–575. [Google Scholar] [CrossRef]
- Baillon, J.B.; Bruck, R.E.; Reich, S. On the asymptotic behavior of nonexpansive mappings and semigroups in Banach spaces. Houst. J. Math. 1978, 4, 1–9. [Google Scholar]
- Rockafellar, R.T. On the maximal monotonicity of subdifferential mappings. Pac. J. Math. 1970, 33, 209–216. [Google Scholar] [CrossRef]
- Tibshirani, R. Regression shrinkage and selection via the Lasso. J. R. Stat. Soc. 1996, 58, 267–288. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 0 | 14.2857 | 23.2143 | 50 | |||
| 1 | 7.0108 | 8.9582 | 24.5378 | |||
| 2 | 2.2417 | 2.5920 | 7.8459 | |||
| 3 | 0.5250 | 0.5775 | 1.8374 | |||
| 4 | 0.0959 | 0.1026 | 0.3358 | |||
| 5 | 0.0142 | 0.0150 | 0.0498 | |||
| 6 | 0.0018 | 0.0018 | 0.0062 | |||
| 7 | ||||||
| 8 | ||||||
| 9 | ||||||
| n | ||||
|---|---|---|---|---|
| 0 | 2.4490 | 1.5747 | ||
| 1 | 0.6998 | 0.3666 | ||
| 2 | 0.1835 | 0.0852 | ||
| 3 | 0.0419 | 0.0180 | ||
| 4 | 0.0084 | 0.0034 | ||
| 5 | 0.0015 | |||
| 6 | ||||
| 7 | ||||
| 8 | ||||
| 9 |
| DOL | Method | Step Size | Iteration (n) | CPU Time (s) | |
|---|---|---|---|---|---|
| Algorithm 1 | 9 | 0.10002 | |||
| Algorithm 3 | 8 | 0.0898 | |||
| Sitthithakerngkiet et al. [46] | 23 | 0.086643 | |||
| Byrne et al. [36] | 10 | 0.087847 | |||
| Algorithm 1 | 11 | 0.11003 | |||
| Algorithm 3 | 10 | 0.109419 | |||
| Sitthithakerngkietet et al. [46] | 218 | 0.104271 | |||
| Byrne et al. [36] | 12 | 0.092779 | |||
| Algorithm 1 | 12 | 0.116322 | |||
| Algorithm 3 | 11 | 0.119499 | |||
| Sitthithakerngkietet et al. [46] | 2171 | 0.768808 | |||
| Byrne et al. [36] | 13 | 0.084488 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tang, Y.; Cho, Y.J. Convergence Theorems for Common Solutions of Split Variational Inclusion and Systems of Equilibrium Problems. Mathematics 2019, 7, 255. https://doi.org/10.3390/math7030255
Tang Y, Cho YJ. Convergence Theorems for Common Solutions of Split Variational Inclusion and Systems of Equilibrium Problems. Mathematics. 2019; 7(3):255. https://doi.org/10.3390/math7030255
Chicago/Turabian StyleTang, Yan, and Yeol Je Cho. 2019. "Convergence Theorems for Common Solutions of Split Variational Inclusion and Systems of Equilibrium Problems" Mathematics 7, no. 3: 255. https://doi.org/10.3390/math7030255
APA StyleTang, Y., & Cho, Y. J. (2019). Convergence Theorems for Common Solutions of Split Variational Inclusion and Systems of Equilibrium Problems. Mathematics, 7(3), 255. https://doi.org/10.3390/math7030255