Modulation Equation for the Stochastic Swift–Hohenberg Equation with Cubic and Quintic Nonlinearities on the Real Line


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Space and Mild Solution
3. Derivation of Cubic–Quintic Ginzburg–Landau Equation
4. General Bounds on OU Process
5. Main Results
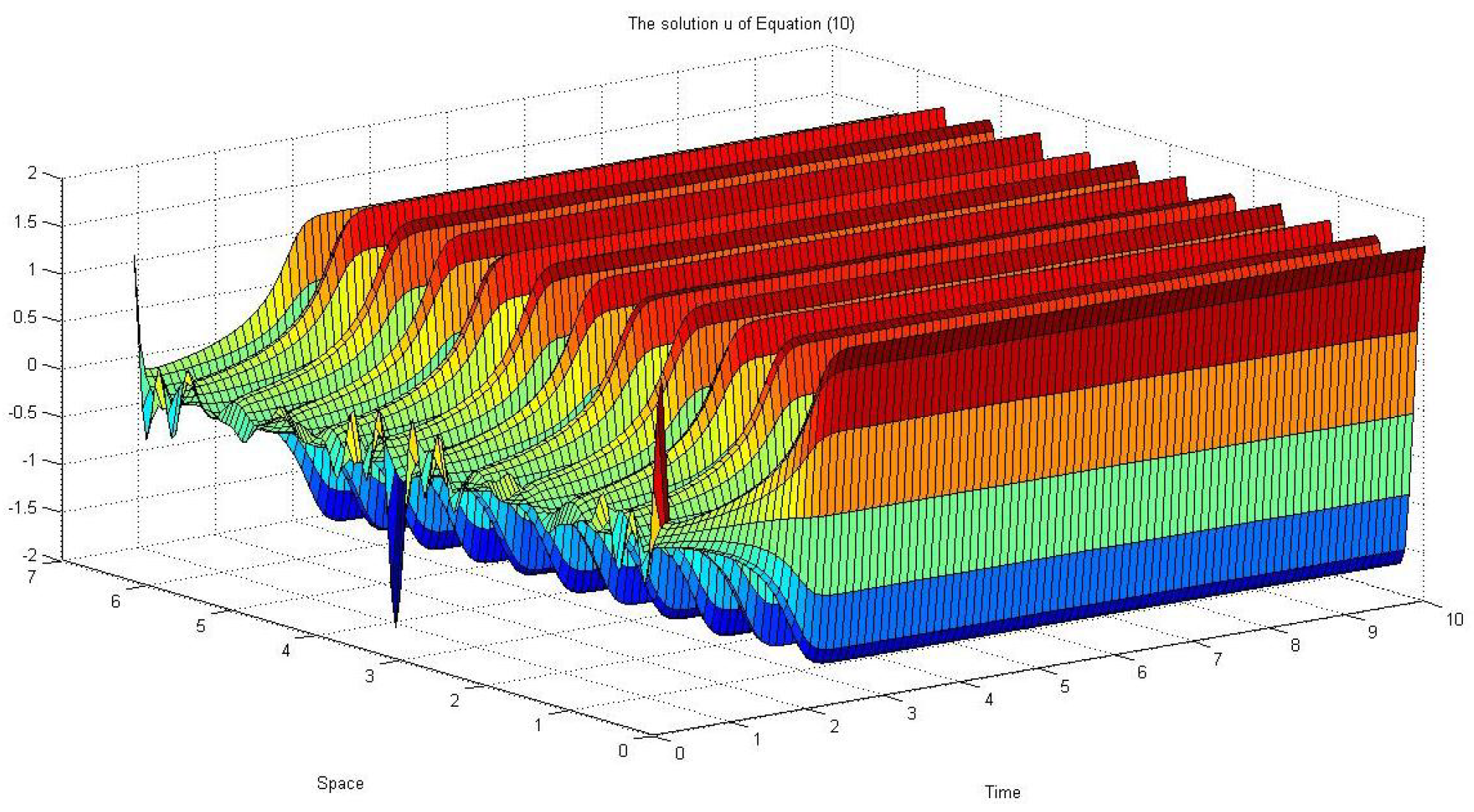
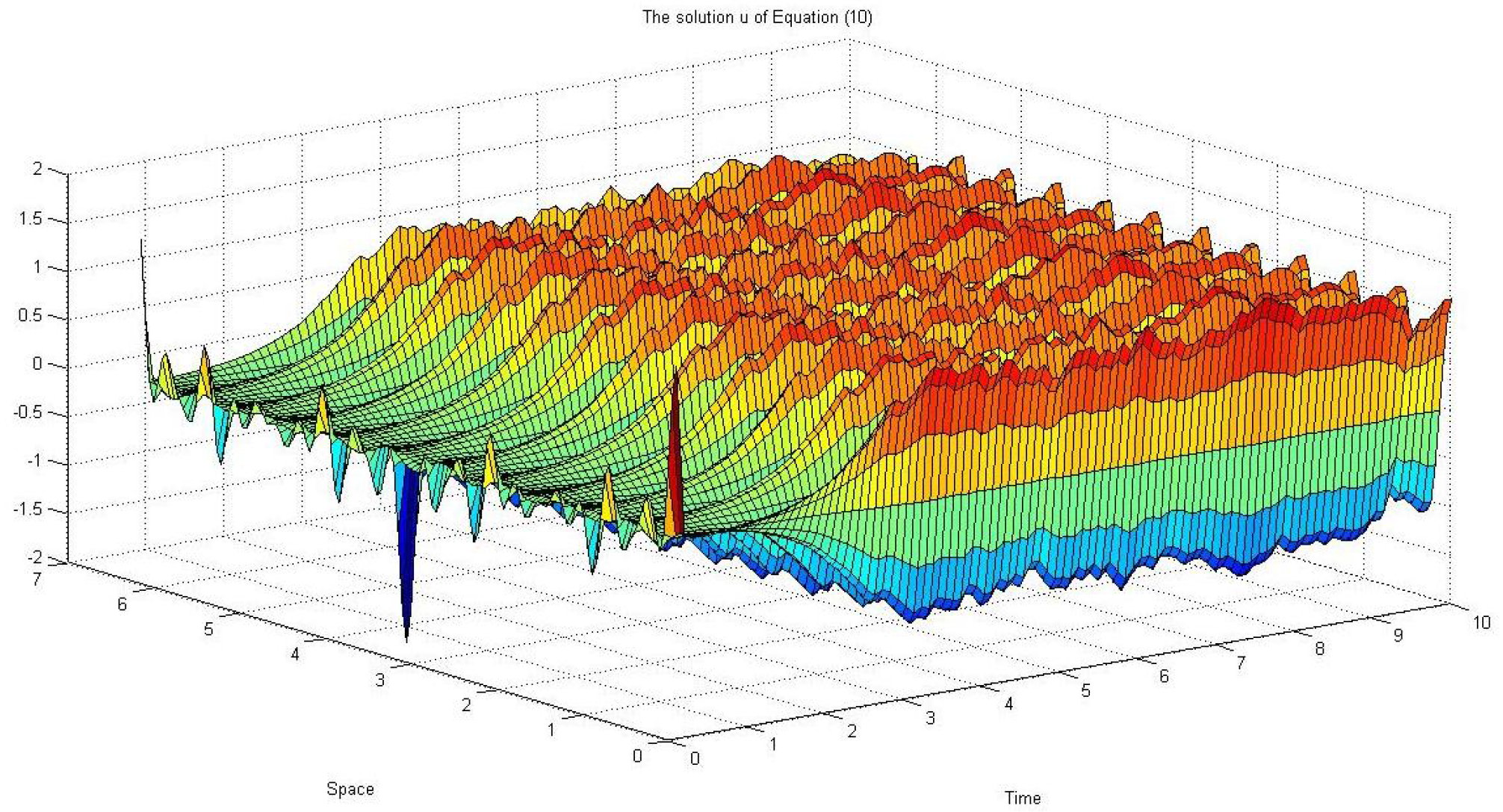
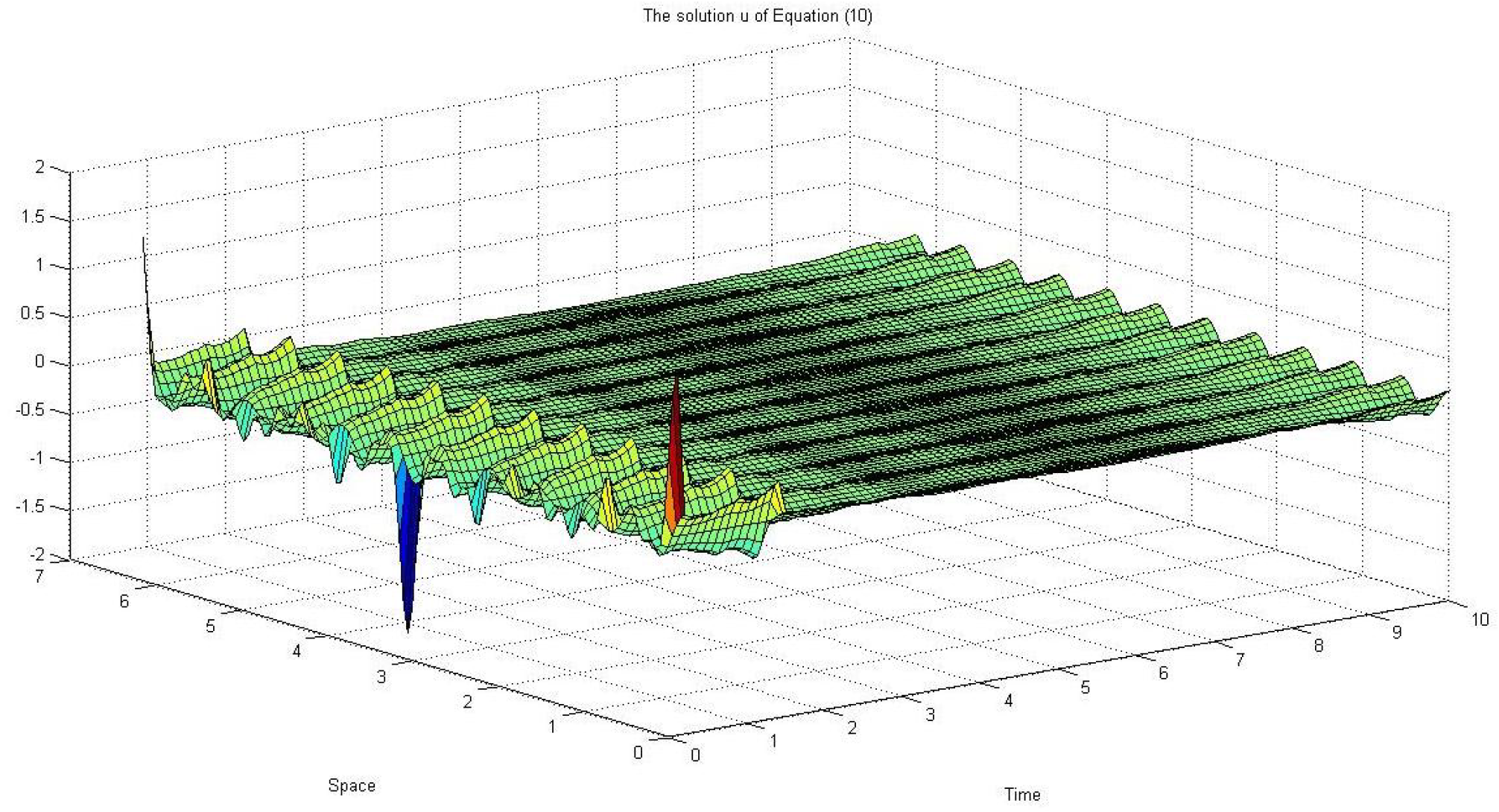
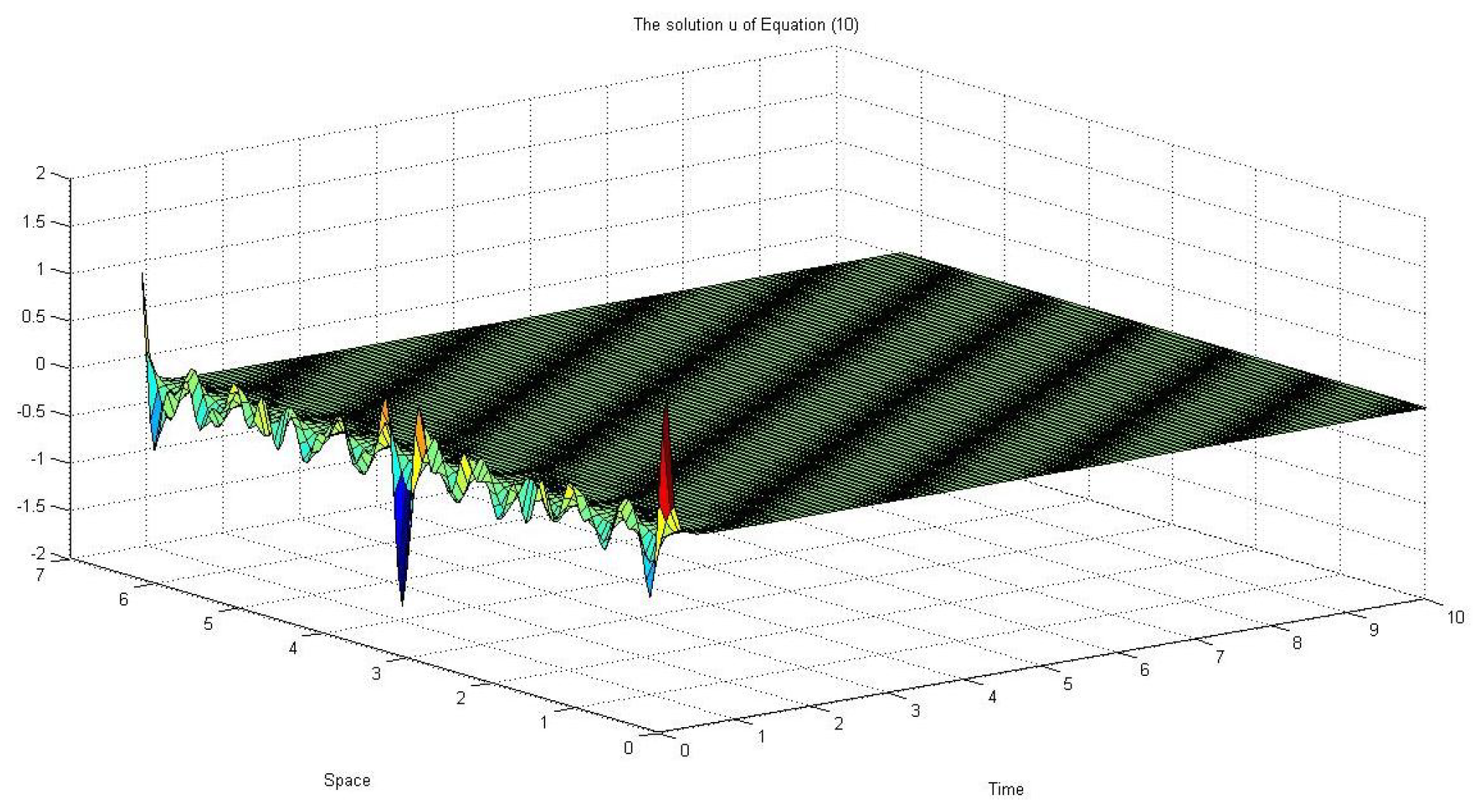
6. The Effect of Degenerate Additive Noise
- The coefficient of the cubic term is positive for and is a non-positive otherwise,
- The coefficient of the linear term is positive for if or if and is a non-positive otherwise.
7. Conclusions
Funding
Acknowledgments
Conflicts of Interest
References
- Swift, J.B.; Hohenberg, P.C. Hydrodynamic fluctuations at the convective instability. Phys. Rev. A 1977, 15, 319–328. [Google Scholar] [CrossRef]
- Cross, M.C.; Hohenberg, P.C. Pattern formation outside of equilibrium. Rev. Mod. Phys. 1993, 65, 536–1112. [Google Scholar] [CrossRef]
- Kirrmann, P.; Schneider, G.; Mielke, A. The validity of modulation equations for extended systems with cubic nonlinearities. Proc. R. Soc. Edinb. Sect. A 1992, 122, 85–91. [Google Scholar] [CrossRef]
- Batiste, O.; Knobloch, E.; Alonso, A.; Mercader, I. Spatially localized binary fluid convection. J. Fluid Mech. 2006, 560, 149–158. [Google Scholar] [CrossRef]
- Lo Jacono, D.; Bergeon, A.; Knobloch, E. Spatially localized binary fluid convection in a porous medium. Phys. Fluids 2010, 22, 073601. [Google Scholar] [CrossRef]
- Mercader, I.; Batiste, O.; Alonso, A.; Knobloch, E. Convectons, anticonvectons and multiconvectons in binary fluid convection. J. Fluid Mech. 2011, 667, 586–606. [Google Scholar] [CrossRef]
- Mercader, I.; Batiste, O.; Alonso, A.; Knobloch, E. Traveling convections in binary fluid convection. J. Fluid Mech. 2013, 722, 240–266. [Google Scholar] [CrossRef]
- Beaume, C.; Bergeon, A.; Knobloch, E. Homoclinic snaking of localized states in doubly diffusive convection. Phys. Fluids 2011, 23, 094102. [Google Scholar] [CrossRef]
- Burke, J.; Knobloch, E. Snakes and ladders: Localized states in the Swift–Hohenberg equation. Phys. Lett. A 2007, 360, 681–688. [Google Scholar] [CrossRef]
- Dawes, J.H. Modulated and localised states in a finite domain. SIAM J. Appl. Dyn. Syst. 2009, 8, 909–930. [Google Scholar] [CrossRef][Green Version]
- Hiraoka, Y.; Ogawa, T. Rigorous numerics for localized patterns to the quintic Swift–Hohenberg equation. Jpn. J. Indust. Appl. Math. 2005, 22, 57–75. [Google Scholar] [CrossRef]
- Sakaguchi, H.; Brand, H.R. Stable localized solutions of arbitrary length for the quintic Swift–Hohenberg equation. Physica D 1996, 97, 274–285. [Google Scholar] [CrossRef]
- Avitabile, D.; Lloyd, D.J.; Burke, J.; Knobloch, E.; Sandstede, B. To snake or not to snake in the planar Swift–Hohenberg equation. SIAM J. Appl. Dyn. Syst. 2010, 9, 704–733. [Google Scholar] [CrossRef]
- Mohammed, W.W.; Blömker, D.; Klepel, K. Modulation equation for stochastic Swift–Hohenberg equation. SIAM J. Math. Anal. 2013, 45, 14–30. [Google Scholar] [CrossRef]
- Blömker, D.; Hairer, M.; Pavliotis, G.A. Modulation equations: Stochastic bifurcation in large domains. Commun. Math. Phys. 2005, 258, 479–512. [Google Scholar] [CrossRef]
- Hutt, A. Additive noise may change the stability of nonlinear systems. Europhys. Lett. 2008, 84, 1–4. [Google Scholar] [CrossRef]
- Hutt, A.; Longtin, A.; Schimansky-Geier, L. Additive global noise delays Turing bifurcations. Phys. Rev. Lett. 2007, 98, 230601. [Google Scholar] [CrossRef] [PubMed]
- Klepel, K.; Blömker, D.; Mohammed, W.W. Amplitude equation for the generalized Swift Hohenberg equation with noise. Zeitschrift für Angewandte Mathematik und Physik ZAMP 2014, 65, 1107–1126. [Google Scholar] [CrossRef][Green Version]
- Adams, R.A. Sobolev Spaces; Academic Press: New York, NY, USA, 1975. [Google Scholar]
- Blömker, D.; Mohammed, W.W. Amplitude equations for SPDEs with cubic nonlinearities. Int. J. Probab. Stoch. Process. 2013, 85, 181–215. [Google Scholar] [CrossRef][Green Version]





© 2019 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mohammed, W.W. Modulation Equation for the Stochastic Swift–Hohenberg Equation with Cubic and Quintic Nonlinearities on the Real Line. Mathematics 2019, 7, 1217. https://doi.org/10.3390/math7121217
Mohammed WW. Modulation Equation for the Stochastic Swift–Hohenberg Equation with Cubic and Quintic Nonlinearities on the Real Line. Mathematics. 2019; 7(12):1217. https://doi.org/10.3390/math7121217
Chicago/Turabian StyleMohammed, Wael W. 2019. "Modulation Equation for the Stochastic Swift–Hohenberg Equation with Cubic and Quintic Nonlinearities on the Real Line" Mathematics 7, no. 12: 1217. https://doi.org/10.3390/math7121217
APA StyleMohammed, W. W. (2019). Modulation Equation for the Stochastic Swift–Hohenberg Equation with Cubic and Quintic Nonlinearities on the Real Line. Mathematics, 7(12), 1217. https://doi.org/10.3390/math7121217