1. Introduction
The spectral method has been used in many fields to solve linear partial differential equations (PDEs) such as the Poisson equation, the Helmholtz equation, and the diffusion equation [
1,
2]. The advantage of the spectral method over other numerical methods in solving linear PDEs is its high accuracy; when solutions of PDEs are smooth enough, errors of numerical solutions decrease exponentially as the number of discretization nodes increases [
3].
Based on the types of boundary conditions, different spectral basis functions can be used to discretize in physical space. There are several boundary conditions used in solving mathematical and engineering linear PDEs, but the boundary conditions can be classified as periodic and non-periodic boundary conditions. For periodic boundary conditions, the domain is usually discretized using the Fourier series, while Lengendre polynomials and Chebyshev polynomials are most frequently used as basis functions for non-periodic boundary conditions. To investigate an efficient way to spectrally solve PDEs in this paper, we restrict the scope of this paper by only considering linear PDEs with non-periodic boundary conditions. Of the spectral basis functions that can be used with non-periodic boundary conditions, we use the Chebyshev polynomial to discretize the equations in space to use their minimum error properties and achieve spectral accuracy across the whole domain [
4].
There are several methods for solving linear PDEs using Chebyshev polynomials. In the collocation method, linear PDEs are directly solved in physical space so that implementation of the method is relatively easy compared to other methods. However, the differentiation matrix derived from the collocation method is full, making computation slow, and ill-conditioning of the differentiation matrix in the collocation method can produce numerical solutions with high errors, especially when a high number of collocation points is used [
5].
Another method for solving linear PDEs spectrally with Chebyshev polynomials is the Chebyshev-tau method, which involves solving linear PDEs in spectral space. In the Chebyshev-tau method, the boundary conditions of PDEs are directly enforced to the equation of the system [
5,
6,
7]. This enforcement of boundary conditions produces tau lines, making numerical calculation slow because tau lines increase interactions between Chebyshev modes [
8,
9]. As the dimension of PDEs rises, the length of calculation time caused by tau lines increases rapidly, resulting in significant lagging to solve PDEs [
10,
11].
Unlike the Chebyshev-tau method, the Chebyshev-Galerkin method removes direct enforcement of boundary conditions to the equation of the system by discretizing in space using carefully chosen basis functions called Galerkin basis functions that automatically obey given boundary conditions [
8]. As a result, when the Chebyshev-Galerkin method is used, tau lines are not created in the system of equation, and therefore, the interaction of tau lines in numerical calculations is not a concern. Because of this advantage, the Chebyshev-Galerkin method is popular for spectral calculation of PDEs. For example, Shen [
12] studied proper choices of Galerkin basis functions satisfying standard boundary conditions such as Dirichlet and Neumann boundary conditions and solved linear PDEs with them, and Julien and Watson [
13] and Liu et al. [
11] used the Galerkin basis functions to solve multi-dimensional linear PDEs with high efficiency.
In 1-D problems, it is straightforward to write linear PDEs as a matrix form in spectral space using a differentiation matrix (see
Section 2 for more details). However, because the differentiation matrix is an upper triangular matrix, solving linear PDEs by inverting the differentiation matrix (or using iterative methods to solve the differentiation matrix) is a computationally expensive way to solve equations. Because computational cost increases rapidly as the dimension of the problems increases, efficiently computing solutions of linear PDEs becomes even more important in multi-dimensional problems. In 1-D problems, computational time can be easily saved by modifying the dense equation to sparse systems using the three term recurrence relation [
14]. However, due to the coupling of Chebyshev modes in multi-dimensional problems, finding an efficient way to solve linear PDEs is not as straightforward as in 1-D problems.
To facilitate computation in multi-dimensional linear PDE problems, Julien and Watson [
13] presented a method called the quasi-inverse technique. Based on the three term recursion relationship in 1-D, they invented a quasi-inverse matrix, and applied it to multi-dimensional linear PDE problems. As a result of the quasi-inverse technique, dense differential operators in multi-dimensional linear PDEs were reduced to sparse operators, then it was possible to efficiently solve multi-dimensional linear PDEs from the sparse systems with approximately
operations for
k-dimensional problems. Haidvogel and Zang [
15] and Shen [
12] presented another way to efficiently solve multi-dimensional linear PDEs called matrix diagonalization method. The key of the matrix diagonalization method is decoupling the coupled Chebyshev modes using the eigenvalue and eigenvector decomposition method [
16] and lowering dimensionality of the problem to convert solving a high dimensional problem into solving 1-D linear PDE problems multiple times as a function of the eigenvalues of the system [
17].
In this paper, we propose a new method to solve multi-dimensional linear PDEs using Chebyshev polynomials called the quasi-inverse matrix decomposition method. Our method was created by adapting the quasi-inverse technique to the matrix diagonalization method. In our method, the equations of systems are first derived using the quasi-inverse technique, then the matrix diagnalization method is used to efficiently solve the derived equations of the systems using eigenvalue and eigenvector decomposition. Because our method uses merits of both the quasi-inverse technique and the matrix diagonalization method, it computes numerical solutions of multi-dimesional linear PDE problems faster than these two methods. We will describe our quasi-inverse matrix decomposition method in this paper by applying it to four test examples.
The rest of our paper is composed as follows. In
Section 2, we review the Chebyshev-tau method, the Chebyshev-Galerkin method, and the quasi-inverse technique with a 1-D Poisson equation. Then, the quasi-inverse matrix decomposition method is explained in the next section by applying it to solve 2-D and 3-D Poisson equations based on the Chebyshev-Galerkin method. In
Section 4, we apply our quasi-inverse matrix decomposition method to several multi-dimensional linear PDEs and compare results to the ones from the quasi-inverse method and matrix diagonalization method in terms of accuracy of numerical solutions and CPU time to solve the problems. Our conclusions are described in
Section 5.
3. Quasi-Inverse Matrix Diagonalization Method
The quasi-inverse technique can be used with both the Chebyshev-tau method and the Chebyshev-Galerkin method. In this paper, we will use the quasi-inverse technique with the Chebyshev-Galerkin method to solve multi-dimensional problems for two reasons: (1) using the Galerkin basis function is much more convenient to apply the matrix diagonalization method because the Chebyshev-tau method needs to impose boundary conditions to the equation, which makes the entire calculation complicated in multi-dimensional problems and sometimes makes equations non-separable, and (2) the Chebyshev-Galerkin method is faster than the Chebyshev-tau method to obtain numerical solutions of PDEs. Due to these advantages, our quasi-inverse matrix diagonalization method is invented based on the Chebyshev-Galerkin method. In this section, we will introduce the quasi-inverse matrix diagonalization method by applying it to solve 2-D and 3-D Poisson equations.
3.1. 2-D Poisson Equation
Solving PDEs (including 2-D and 3-D Poisson equations) using the quasi-inverse matrix diagonalization method is divided into two steps.: (1) derive sparse equations of systems using the quasi-inverse technique, and (2) solve the derived equations efficiently using the matrix diagonalization method.
3.1.1. Quasi-Inverse Technique
The 2-D Poisson equation with Dirichlet boundary conditions can be expressed as follows:
Definition 6. When the 2-D Poisson equation is solved spectrally with Chebyshev polynomials, and are respectively discretized in space asandwhere L and M are the highest Chebyshev modes in x and y, respectively, and and are Chebyshev coefficients of and , respectively.
Multi-dimensional PDEs can be solved with the combination of a 1-D differential matrix using the Kronecker product [
19]. Here, the Kronecker product of matrices
and
is defined as
where
is the
element of matrix
. Because the second derivative of
u with respect to
x and
y in 2-D are respectively equal to
and
where
and
are respectively the 1-D Laplacian matrices differentiated in
x and
y, Equation (
25) can be rewritten in a matrix form as
Here,
and
are the
arrays where the
i row elements
and
equal
and
, respectively, where
for
and
. To make use of the advantage of the quasi-inverse technique, we multiply on the left by
to Equation (
28). Then, based on the property of the Kronecker product such that
, we can obtain
Definition 7. In the Chebyshev-Galerkin method, is approximated by the coefficients of the Galerkin basis functions multiplied by the Galerkin basis functions in x and y, defined by Remark 3. If we define as the array in which the j row element is equal to where for and , equating Equations (30) and (26) allows us to transform Chebyshev space to Galerkin space from Here, the sizes of matrices and are and , respectively.
Substituting Equation (
31) to Equation (
29) gives
Then, by defining
and
where
and
y, it is possible to obtain
from Equation (
32). The top two rows of all matrices in Equation (
33) are zero because these rows are discarded for boundary conditions enforcement. As studied in the 1-D Poisson equation, discarded modes should be omitted from the equation when a PDE is solved with the Chebyshev-Galerkin method. Using the tilde notation described in
Section 2.3, we can only consider non-discarded modes at Equation (
33), which can be written as
The array
can be computed by inverting the sparse matrix
in Equation (
34), but we will further use the matrix diagonalization method to obtain the solutions more efficiently.
3.1.2. Matrix Diagonalization Method
To separate Equation (
34) using the eigenvalue and eigenvector decomposition technique, we first reshape the
array
to the
matrix and define the matrix as
. Similarly, let’s reshape the
array
to the
matrix and define the matrix as
. Then, we can rewrite Equation (
34) as
Multiplying to Equation (
35) on the right by
gives
We want to emphasize that an
n-by-
n matrix is diagonalizable if and only if the matrix has
n independent eigenvectors [
20]. From this argument, we can easily show that the matrix
is diagonalizable because matrices
and
(and their inverse and transpose matrices) are linearly independent, and multiplication of two linearly independent matrices is also linearly independent. As a result, using eigenvalue decomposition, the matrix
can be decomposed as
where
and
are the eigenvector and diagonal eigenvalue matrices of
, respectively.
After substituting Equation (
37) to Equation (
36), multiplying on the right by
allows us to obtain
where
and
. The matrix
in Equation (
38) can be solved efficiently column by column due to the fact that
is the diagonal matrix. If we set
and
and define the
j-th diagonal element of
as
, the
j-th column of Equation (
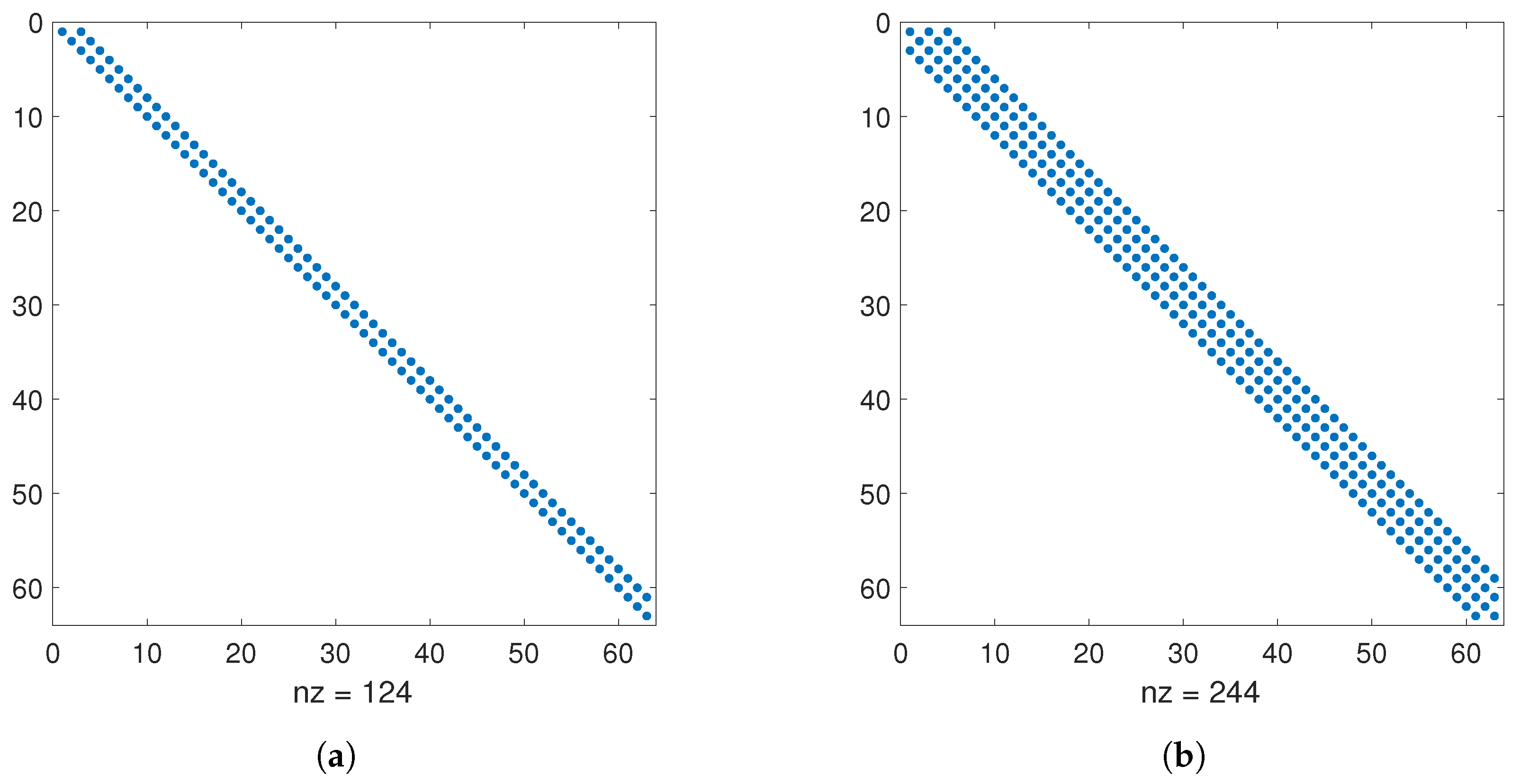
38) can be written as
for
. The matrices
and
are bi-diagonal and quad-diagonal matrices, respectively, whose non-zero elements are presented in
Figure 1. Due to the sparsity, solving Equation (
39) for
can be performed efficiently with
operations for all
j. Once it is performed so that all elements of the matrix
are obtained, the matrix
can be computed from
3.2. 3-D Poisson Equation
By following the same steps used in the 2-D problem, we can use the quasi-inverse matrix diagonalization method to 3-D PDEs. Here, we will explain the way to use the quasi-inverse matrix diagonalization method for 3-D problems, particularly applying it to solve a 3-D Poisson equation.
3.2.1. Quasi-Inverse Technique
We want to solve the 3-D Poisson equation with the following Dirichlet boundary conditions:
Definition 8. In employing Chebyshev polynomials to solve PDEs, and are represented by the sums of Chebyshev coefficients multiplied by Chebyshev polynomials, defined asandwhere L, M and N are the highest Chebyshev modes in x, y, and z, respectively, and and are the -th Chebyshev coefficients of and , respectively.
In a matrix form, Equation (
41) can be rewritten using the Kronecker product as
where
and
are the
arrays in which the
j row components of those arrays are respectively equal to
and
where
for
and
. Multiplying to the left of Equation (
44) by
gives
Definition 9. When using the Chebyshev-Galerkin method, we approximate with the Galerkin basis functions, with their coefficients aswhere is the mode coefficient of the Galerkin basis functions.
Remark 4. By defining as the array in which the j row component is set to where for and , the arrays and are associated by Substituting Equation (
47) to Equation (
45) and distributing the transformation matrix
in each direction produce
As we defined in the solution of the 2-D Poisson equation, use notations of
and
for
and
z. Then, Equation (
49) can be rewritten as
At each matrix in Equation (
49), all elements in the top two rows are zeros because those places are discarded to impose boundary conditions. Erasing those rows and using the symbol tilde to represent the deleted top two rows of given matrices give
For simplicity, define
,
and
, then Equation (
50) can be simplified as
3.2.2. Matrix Diagonalization Method
Decomposition of Equation (
51) can be performed by using the same matrix diagonalization steps used in the 2-D Poisson equation. However, here we want to briefly describe the procedure again to clearly show how the equation is diagonalized and solved efficiently in 3-D problems.
We reshape the array
and
to the
matrix and
matrix and define them as
and
, respectively. With these matrices, we can rewrite Equation (
51) as
Let us multiply on the right by
to Equation (
52)
and decompose
as
where
and
are the eigenvector matrix and diagonal eigenvalue matrix of
, respectively. Then, after substituting Equation (
54) to Equation (
53) and multiplying on the right by
, if we define
and
, it is possible to obtain
for
where the
is the
k-th diagonal element of
, and
and
are set as
and
, respectively.
Equation (
55) is decoupled in
z direction but still coupled in
x and
y directions. To decouple it completely in all directions, based on the definition of
and
, Equation (
55) can be expanded as
Again, let’s reshape
arrays
and
to
matrices and refer those matrices as
and
. Note that the index
k in the parenthesis here is used to clearly show that those matrices are a function of
k so that the matrices’ entries are changed when
k is changed. Defining
=
allows Equation (
56) to be rewritten as
At each
k, Equation (
57) is the 2-D coupled equation. This is the same type of equation as Equation (
35), and therefore the
can be efficiently solved by applying the matrix diagonalization method once again to separate coupled modes in
x and
y directions. To do this, after multiplying on the right by
to Equation (
57), decompose
where
and
are the eigenvector matrix and diagonal eigenvalue matrix of
, respectively. After that, if we multiply on the right by
and set
and
, then we can get
Here, the
is the
j-th diagonal element of
, and
and
are set to
and
. For each
k and
j, Equation (
58) can be solved for
in
operations.
4. Numerical Examples
In this section, our quasi-inverse matrix diagonalization method is applied to several 2-D and 3-D PDEs, and the numerical results are presented. The numbers of Chebyshev modes to discretize solutions at each spatial direction do not need to be identical. Nonetheless, we use the same numbers of Chebyshev modes N at each spatial direction in all test problems for simplicity. Numerical codes are implemented in MATLAB and operated using a 16 GB-RAM Macbook Pro with a 2.3 GHz quad-core Intel Core i7 processor. For matrix diagonalization, MATLAB’s built-in function “eig” is used to compute the matrix’s eigenvalues and eigenvectors. For inverse matrix calculation, we use MATLAB’s backslash operator.
4.1. Multi-Dimensional Poisson Equation
The
n-dimensional Poisson equations described in
Section 3 are solved using the quasi-inverse matrix diagonalization method for
and 3
where
is the boundary of the rectangular domain. As a test example, we define
as
Note that we use coordinates
and
in the 2-D problem and
,
, and
in the 3-D problem. Then, the exact solution of Equation (
59) becomes
This test problem is solved using the quasi-inverse technique, matrix diagonalization method, and quasi-inverse matrix diagonalization method. The accuracy of numerical solutions obtained with these three methods is presented in
Table 1 as a function of
N where the accuracy is computed by the relative
-norm error between the exact and numerical solutions, defined as
where
indicates the
-norm, and
u and
are the numerical and exact solutions, respectively. In both 2-D and 3-D problems, three methods show a similar order of accuracy, which is identical until
. At
, all numerical solutions encounter machine accuracy (∼10
) in double precision.
At high
N, errors of numerical solutions obtained from the spectral method using Chebyshev polynomials can increase because the system of equation tends to be ill-conditioned as
N increases. To be a good spectral method, the error of numerical solutions at high
N should be retained near the machine accuracy and should not rise as
N increases. In this aspect, to further check the error and robustness of the proposed method, we solve the Poisson problem with high
N up to
in 2-D and
in 3-D and measure the errors of numerical solutions of the proposed method as a function of
N. We present the results of this experiment in
Figure 2. As shown in the figure, even at high
N, the errors of numerical solutions of the proposed method retain the order of
, showing high accuracy and robustness of the proposed method.
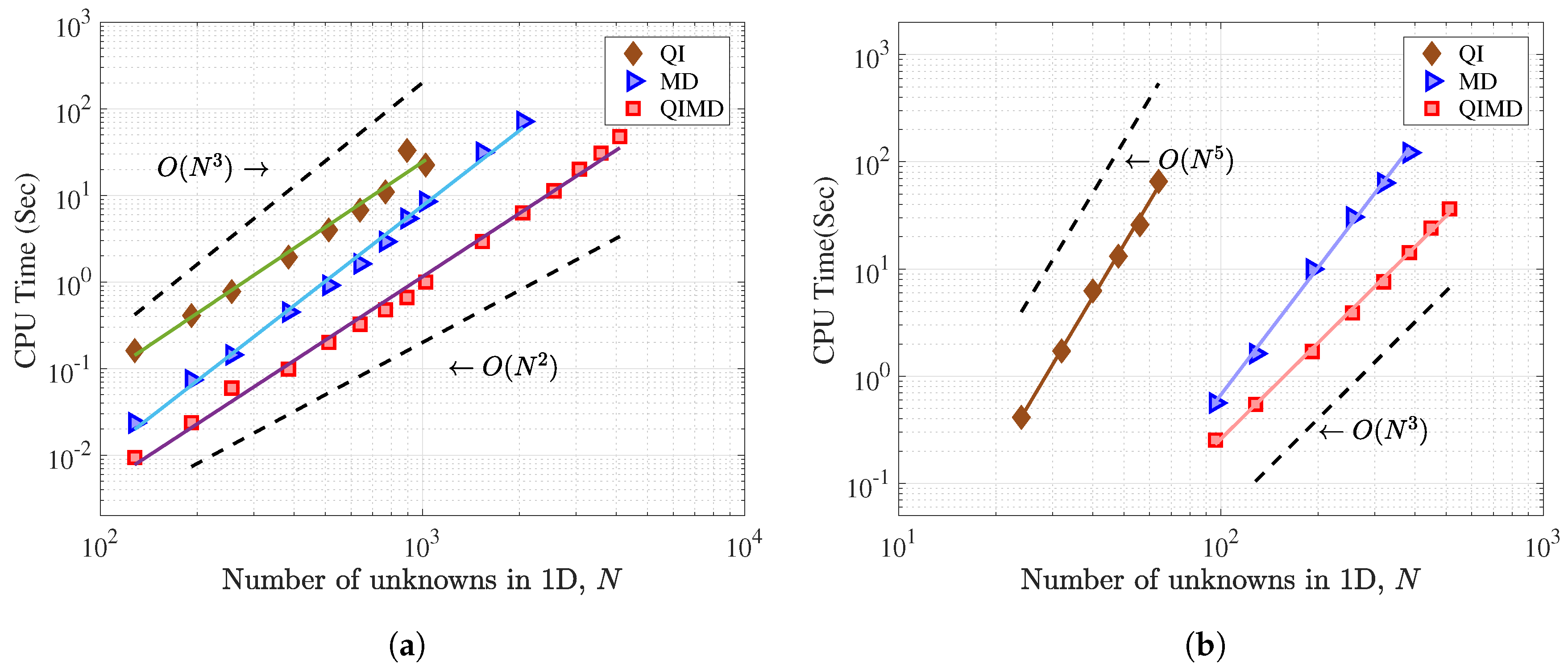
Figure 3 shows the CPU time of the quasi-inverse, matrix diagonalization, and quasi-inverse matrix diagonalization methods in solving 2-D and 3-D Poisson equations as a function of
N as a log-log scale. Then, we know that the slope of each method’s data in the figure indicates the operation complexity of the corresponding method. To calculate slopes, the date are fitted using the best linear regression by
where
t is CPU time, and
m and
b are the coefficients of best linear regression. The results of the best regression are presented in
Table 2 where
is the
r-squared value of the best linear regression.
In solving the 2-D Poisson equation, we observe that the operation complexity of the matrix diagonalization method is highest among the three methods, while the other two methods show similar operation complexity. However, actual CPU time of the quasi-inverse matrix diagonalization method is more than 10 times shorter than the quasi-inverse method. These observations indicate that reduction of operation complexity comes from the quasi-inverse technique’s ability to make the equations of systems sparse, rather than from the matrix diagonalization technique. However, the matrix diagonalization technique is still able to help reduce CPU times by decreasing the actual number of calculations, even though the two methods have the same order of operation complexity.
In solving the 3-D Poisson equation, as Julien and Waston claimed in [
13], the operation complexity of the quasi-inverse technique is approximately
. In the matrix diagonalization method, the operation complexity approximately increases from
to
as dimensionality of the Poisson equation rises from 2-D to 3-D. This is because the bottleneck of the matrix diagonalization method in solving the Poisson equation is computing
from the dense matrix, which requires about
operations per calculation, and repetition of this calculation increases from
N to
times. When using the quasi-inverse matrix diagonalization method to solve the 3-D problem, the most time consuming step is also computing
, but the left-hand side matrix
in Equation (
58) is sparse where the bandwidth is four, and therefore
can be solved in
operations. Because this calculation is repeated
times in the 3-D problem, the total operation complexity of the quasi-inverse matrix diagonalization method becomes
as shown in
Table 2.
4.2. Two-Dimensional Poisson Equation with No Analytic Solution
The next numerical example is a 2-D Poisson equation with the complicated forcing term. That is, we solve the same problem described in
Section 3 in 2-D but with the forcing term
Note that analytic solutions cannot be found for this Poisson equation. The problem is solved using the quasi-inverse matrix diagonalization method by changing the number of unknowns so , and 1024.
Figure 4 shows the values of the forcing term
in
Figure 4a and the numerical solution of the problem
at
in
Figure 4b. To check the accuracy of the quasi-inverse matrix diagonalization method in solving this problem, we compute the numerical errors of the problem. Because no exact solution of the problem is available, we treat the numerical solution at
as the most accurate solution and compare the other numerical solutions with it. Therefore, the error here indicates the relative difference between the numerical solutions obtained at
and the numerical solution obtained at
in a sense of the
norm. We present the values of the errors as a function of
N as a log-log scale in
Figure 5. As
N increases, the error decreases exponentially, which shows spectral accuracy of our method, as expected.
4.3. Coupled Two-Dimensional Helmholtz Equation
We apply the quasi-inverse matrix diagonalization method to 2-D coupled Helmholtz equations and compared the numerical results with the ones obtained from the quasi-inverse technique. We consider the following coupled equations with Dirichlet boundary conditions
where
and
are constant numbers. As a test problem, the functions
and
are assumed as
Then, the exact solutions of Equation (
64) are
The numerical solutions
and
are defined by using Chebyshev polynomials and Galerkin basis functions as
and
and
are defined using Chebyshev polynomials as
For
and 2, define two
arrays as
and
in which the
j-th entries are respectively equal to
and
where
for
and
. This allows us to express Equation (
64) in a matrix form as
To make Equation (
69) simple, rewrite
and
as
and
, respectively, then
Erasing the top two rows of the matrices in Equation (
70) as we did in solving the multi-dimensional Poisson equations gives
where the symbol tilde is defined as before. We want to combine two equations in Equation (
71). To do this, define
and
as
where
if
, otherwise 0. Then, two equations in Equation (
71) can be combined as
By rearranging the terms, Equation (
72) can be rewritten as
where
,
and
as defined in
Section 3.2. Because Equations (
73) and (
51) are the same types of equations, Equation (
73) can be solved for
by following the same steps as solving 3-D PDEs described in
Section 3.2.
We tested coupled 2-D Helmholtz equations at
and
. When
N is 32, 64, 128, 256, and 512, the
L-infinite errors between the numerical and exact solutions and CPU times are computed using the quasi-inverse and quasi-inverse matrix diagonalization methods, and the results are presented in
Table 3. In both cases, the same order of high accuracy is obtained for all
N. In terms of CPU time, similar to the multi-dimensional Poisson equation problems, the latter method is much faster than the former method, especially when
N is high, showing the efficiency of our quasi-inverse matrix diagonalization method.
4.4. Stokes Problem
As a last text problem, a 3-D Stokes problem is solved using our quasi-inverse matrix diagonalization method. The Stokes problem we solved is
with the boundary conditions
where
is the boundary of the rectangular domain. In the problem, we set the body force terms
and
in Equation (
74) as
where
and
. Then, the exact solutions of this Stokes problem are given by
The accuracy of numerical solutions of
, and
p obtained using the quasi-inverse matrix diagonalization method is presented in
Figure 6. The errors decay slower than the ones tested in the previous examples, but all of them show spectral convergence that reached machine accuracy around
.
Figure 7 shows the CPU time of the Stokes problem in a log-log scale as a function of
N. When the best linear regression of the data is implemented, the slope of this graph is 2.884, approximately showing
operation complexity of the 3-D Stokes problem as expected.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}