Target Fusion Detection of LiDAR and Camera Based on the Improved YOLO Algorithm

Abstract
:
1. Introduction
- (1)
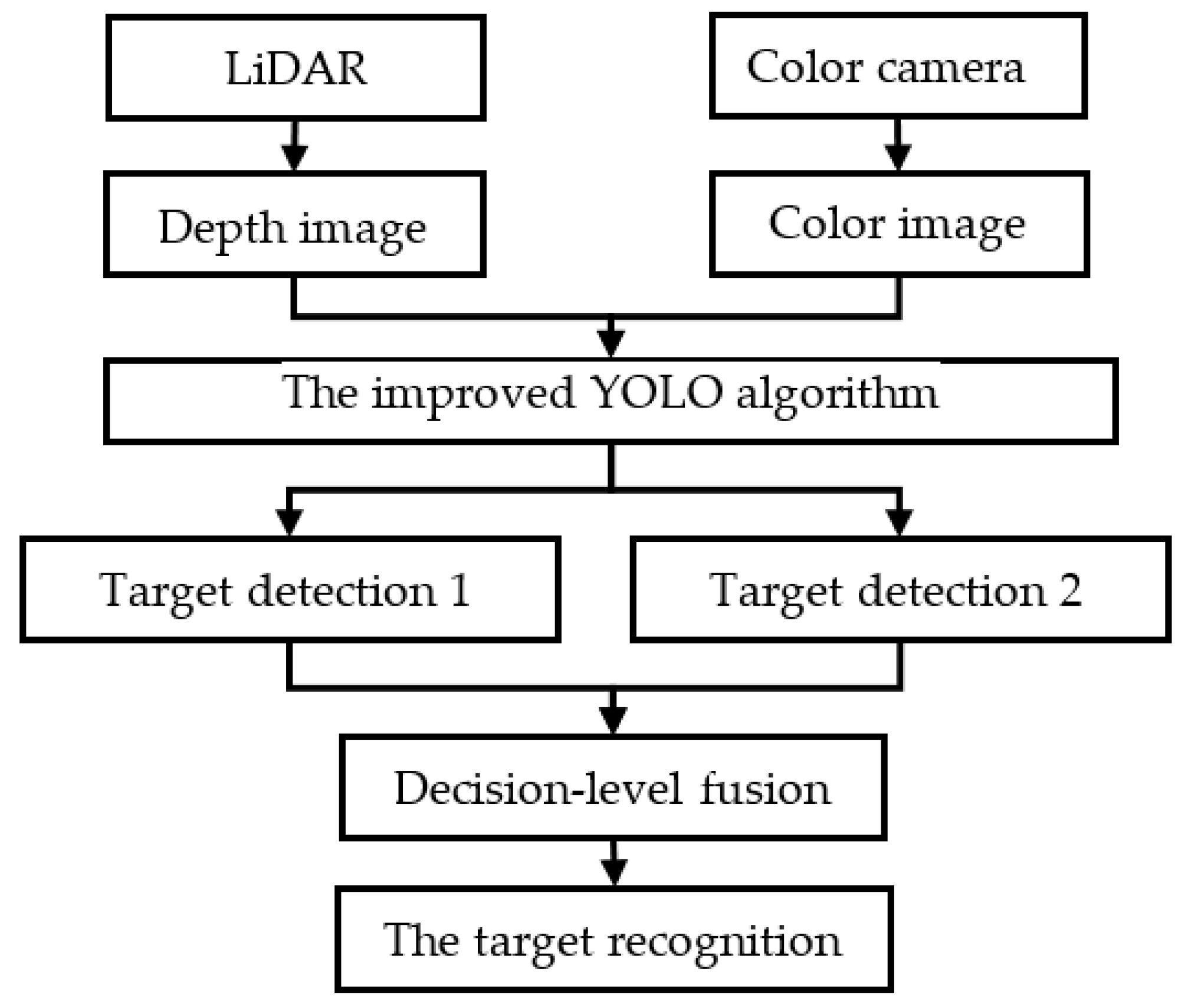
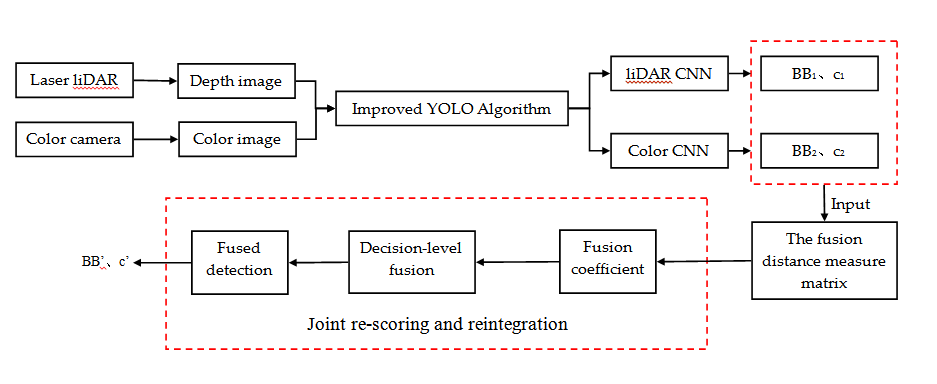
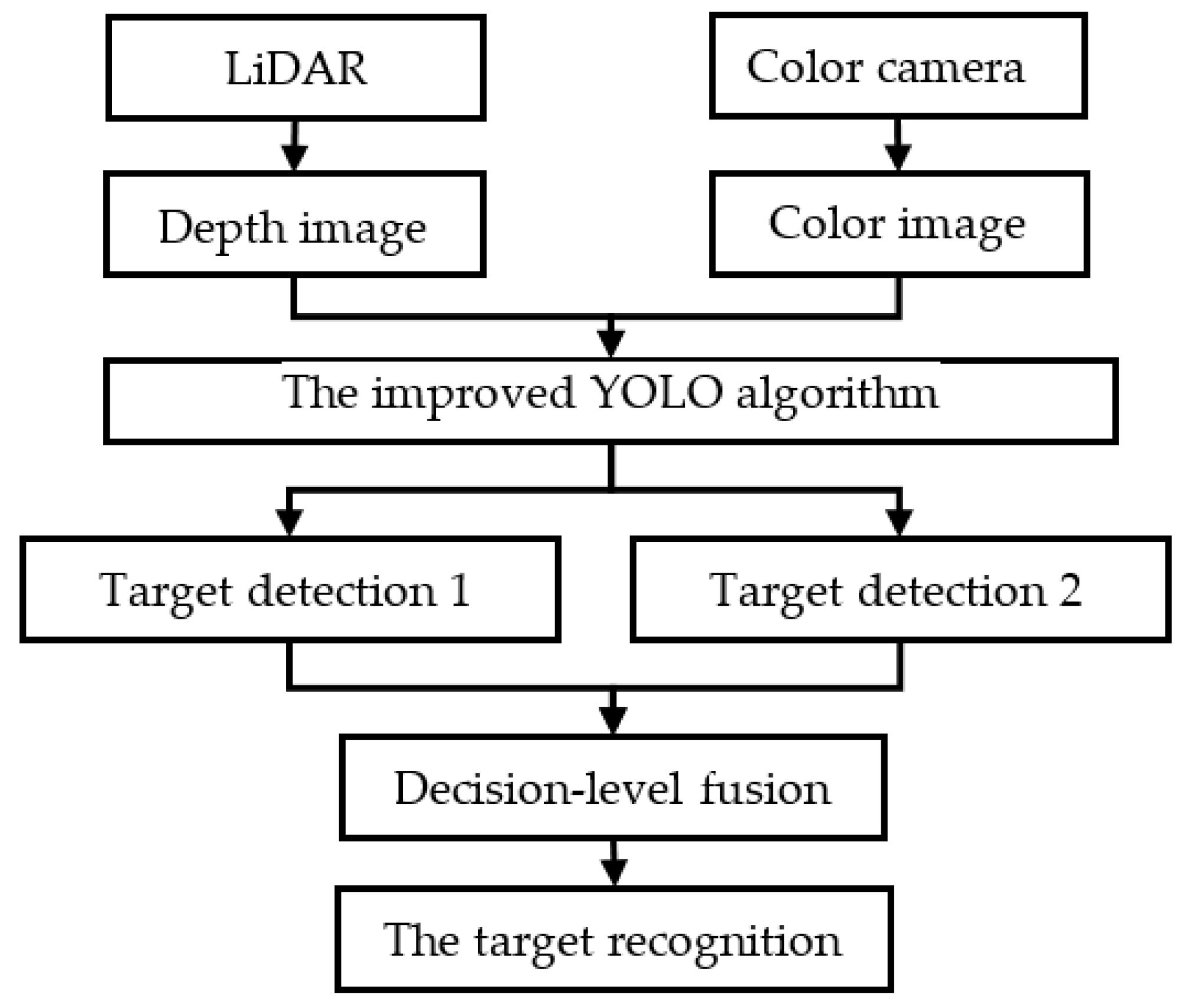
- By incorporating the proposed secondary detection scheme into the algorithm, the YOLO target detection model is improved to detect the targets effectively. Then, decision level fusion is introduced to fuse the image information of LiDAR and color camera output from the YOLO model. Thus, it can improve the target detection accuracy.
- (2)
- The proposed fusion system has been built in related environments, and the optimal parameter configuration of the algorithm has been obtained through training with many samples.
2. System Method Overview
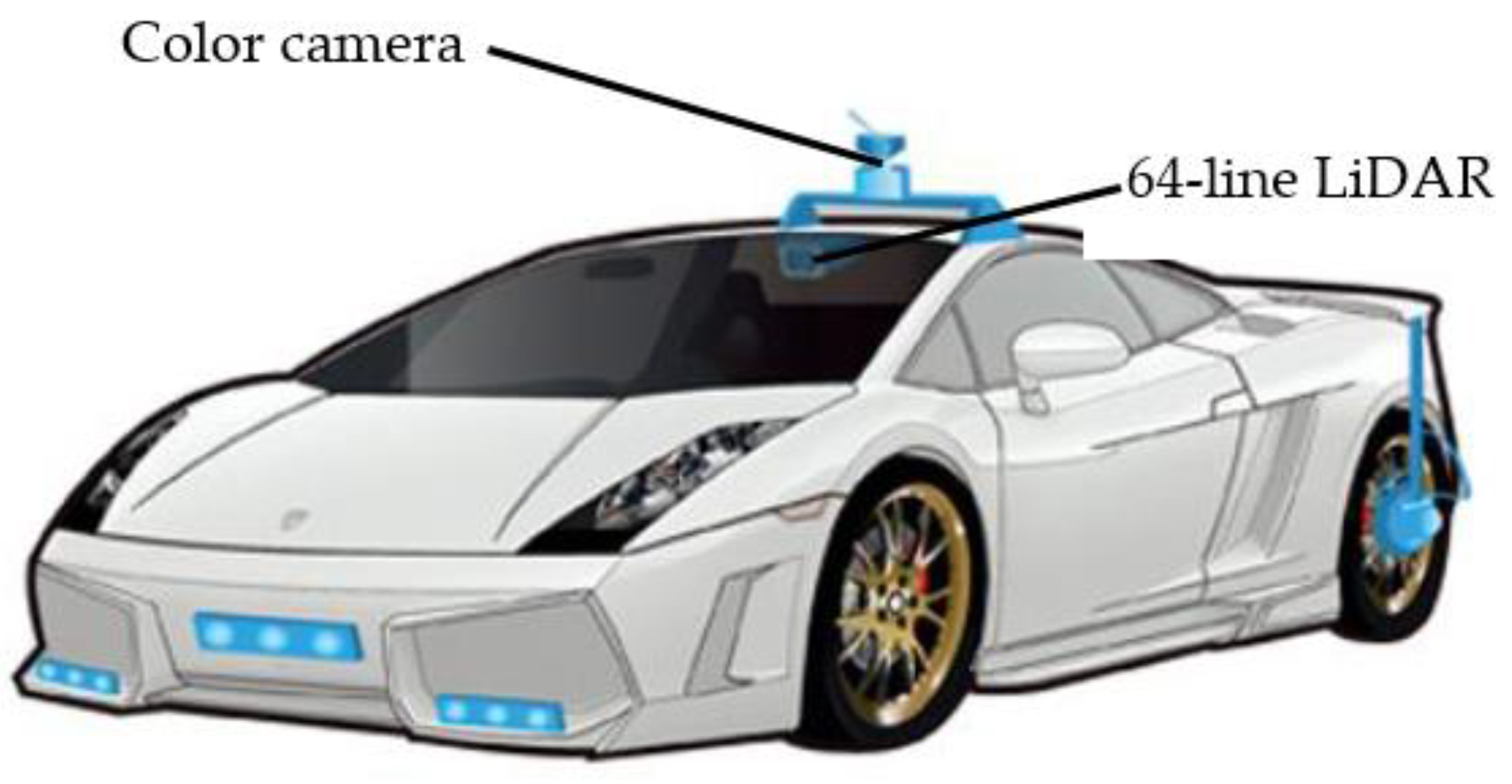
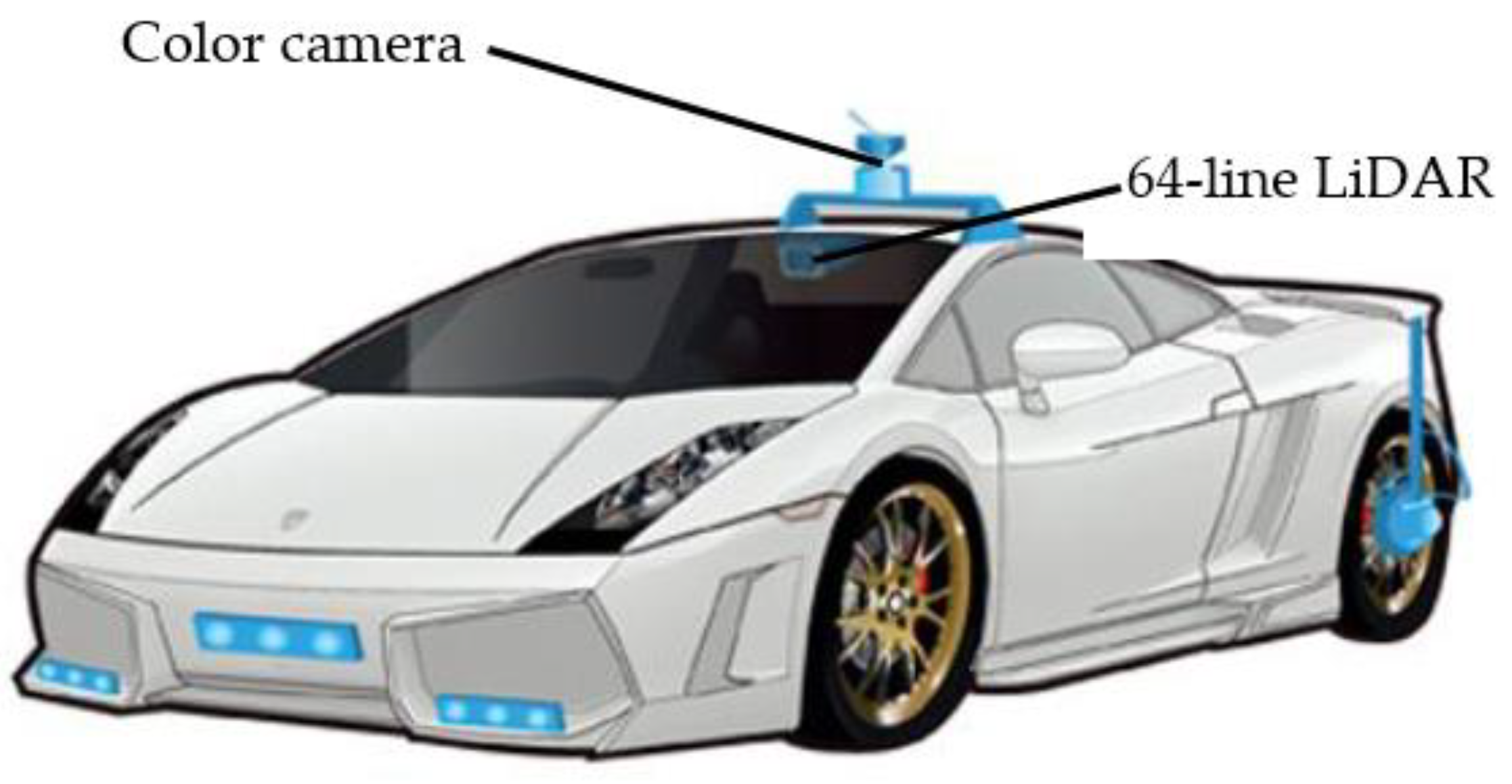
2.1. LiDAR and Color Camera
2.2. Image Calibration and Synchronization
2.2.1. Information Calibration
2.2.2. Information Synchronization
2.3. The Process of Target Detection
3. Obstacle Detection Method
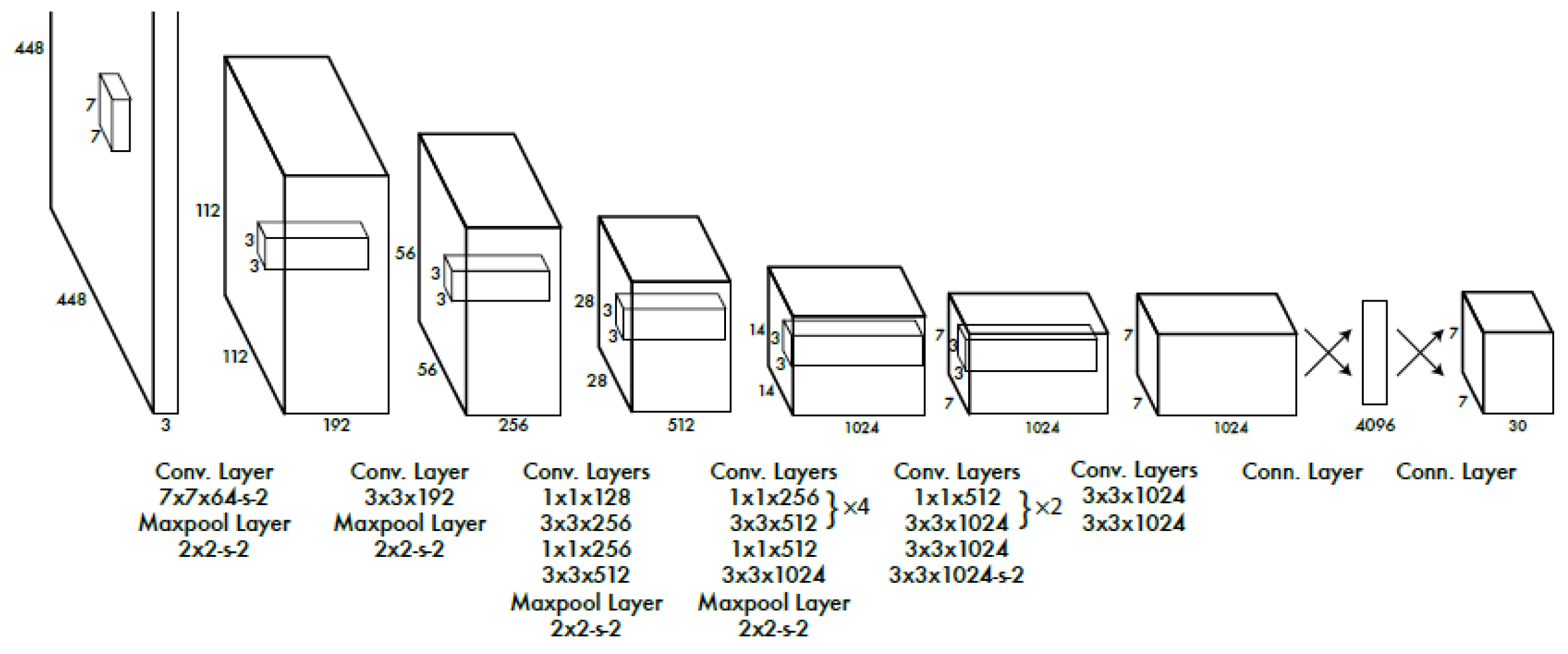
3.1. The Original YOLO Algorithm
3.2. The Improved YOLO Algorithm
- (1)
- YOLO imposes strong spatial constraints on bounding box predictions since each grid cell only predicts two boxes and can only have one class. This spatial constraint limits the number of nearby objects that our model can predict.
- (2)
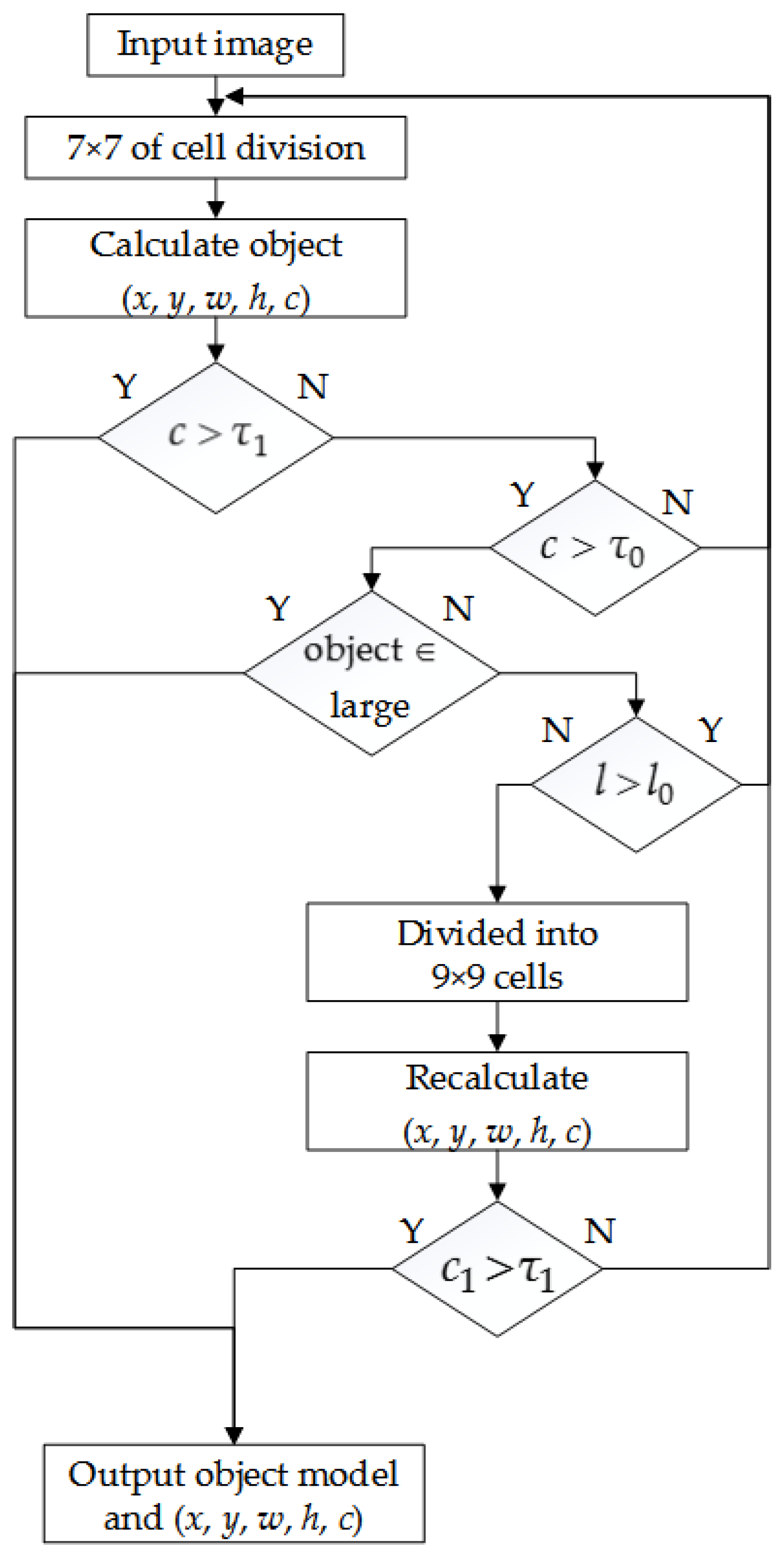
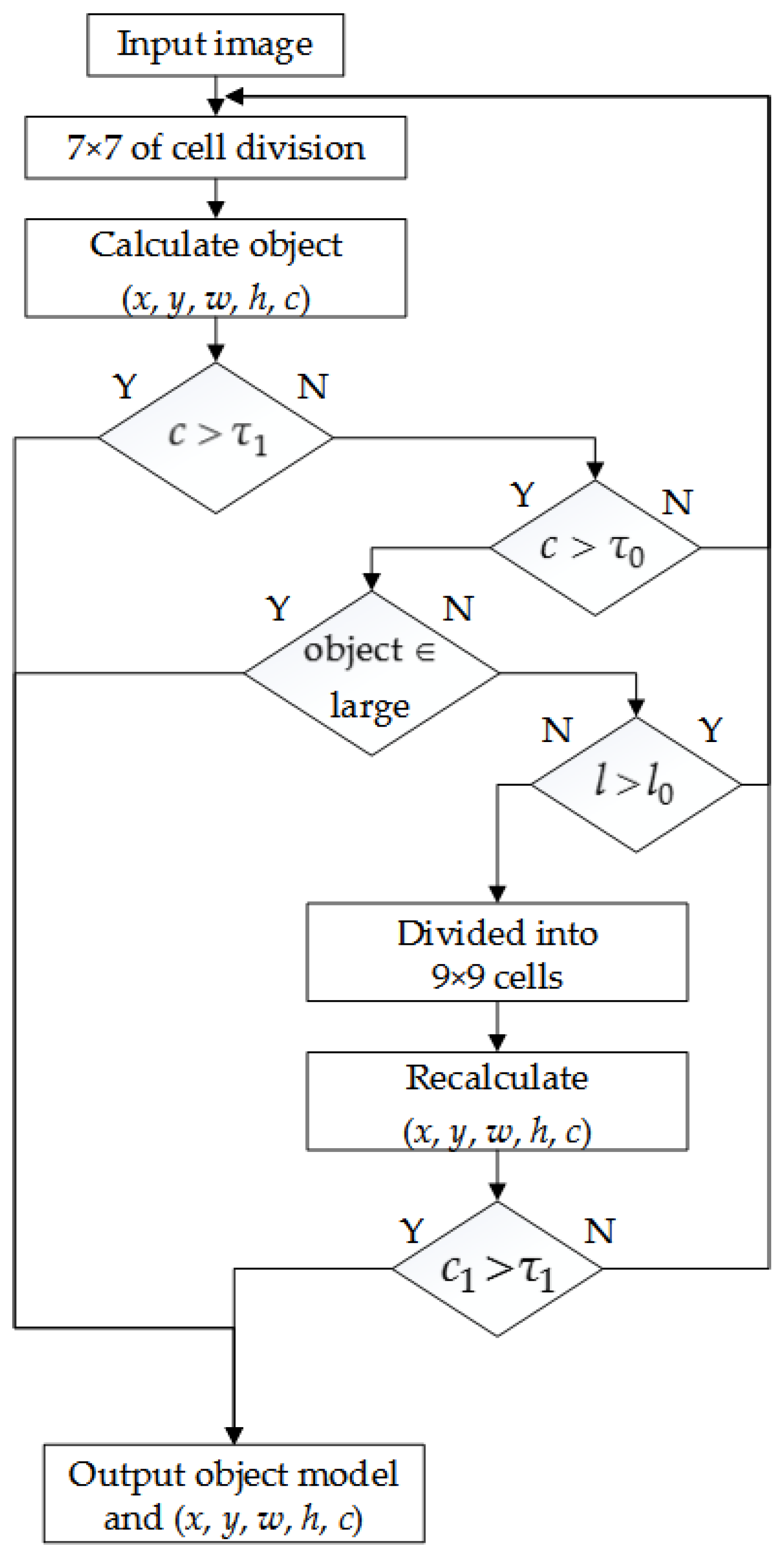
- The cell division of the image is set as 7 × 7 in the original YOLO model, which can only detect large traffic objects such as buses, cars and trucks, but does not meet the requirements of cell division of the picture for dim objects such as non-motor vehicles and pedestrians. When the target is close to the safe distance from the autonomous vehicle and the confidence score of the detection target is low, it is easy to ignore the existence of the target to cause security risk.
- (1)
- When the target is identified, the confidence score c is higher than the maximum threshold , indicating that the recognition accuracy is high, and the frame model of target detection is directly output.
- (2)
- When the recognition categories are {bus, car and truck}, and the confidence score is ( is the minimum threshold), indicating such targets are large in size and easy to detect, and they can be recognized at the next moment, the current border detection model can be directly output.
- (3)
- When the recognition categories are {non-motor vehicle and pedestrian}, the confidence score is . Due to the dim size and mobility of such targets, it is impossible to accurately predict the position of the next moment. At this time, this target is marked as {others}, indicating that it is required to be detected further. Then, the next steps need to be performed:
- (3a)
- When the distance l between the target marked as {others} and the autonomous vehicle is less than the safety distance l0 (the distance that does not affect decision making; if the distance exceeds it, the target can be ignored), i.e., , the slider region divided as {other} is marked, and the region is subdivided into 9 × 9 cells. The secondary convolution operation is performed again. When the confidence score c of the secondary detection is higher than the threshold , the border model of {others} is output, and the category is changed from {others} to {non-motor vehicle} or {pedestrian}. When the confidence score c of the secondary detection is lower than the threshold , it is determined that the target does not belong to the classification item, and the target is eliminated.
- (3b)
- When , this target is kept as {others}. It does not require a secondary convolution operation.
4. Decision-Level Fusion of the Detection Information
4.1. Theory of Data Fusion
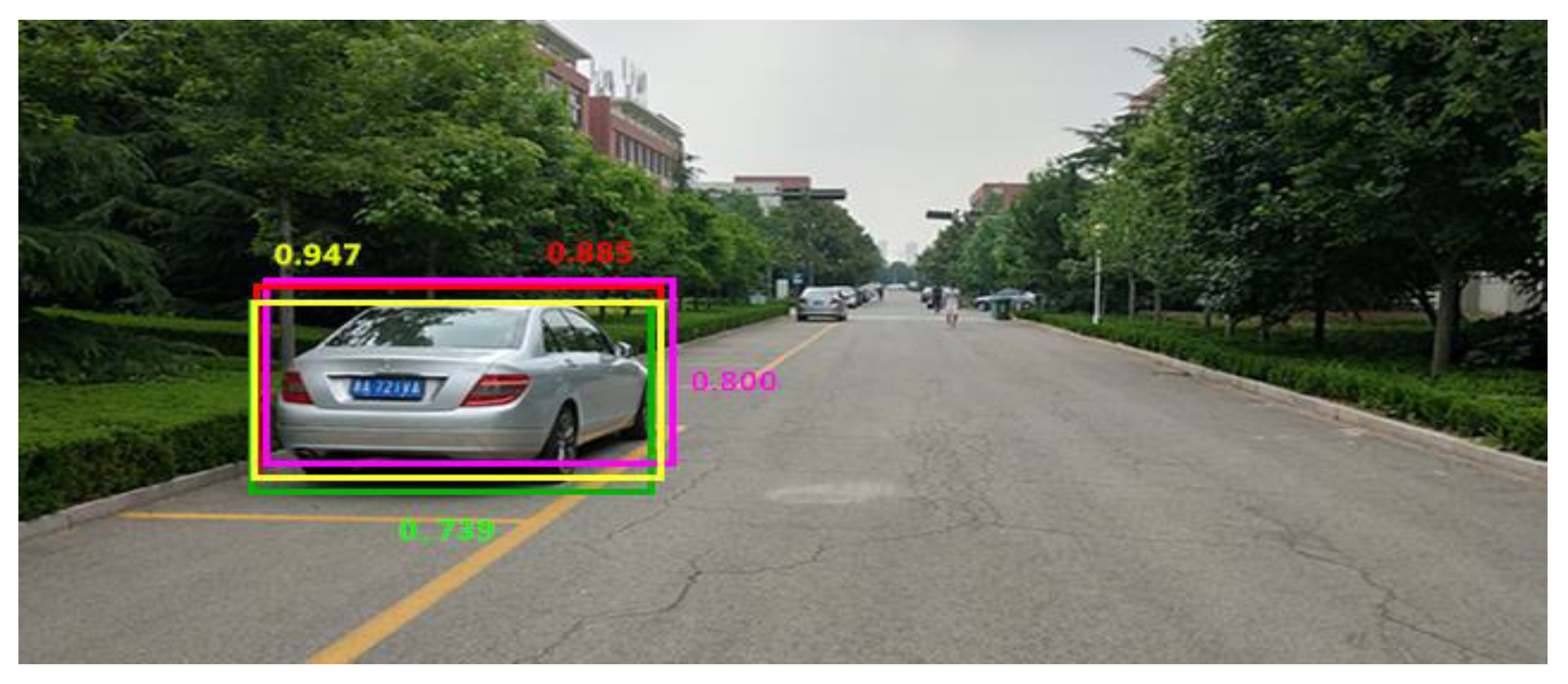
- (1)
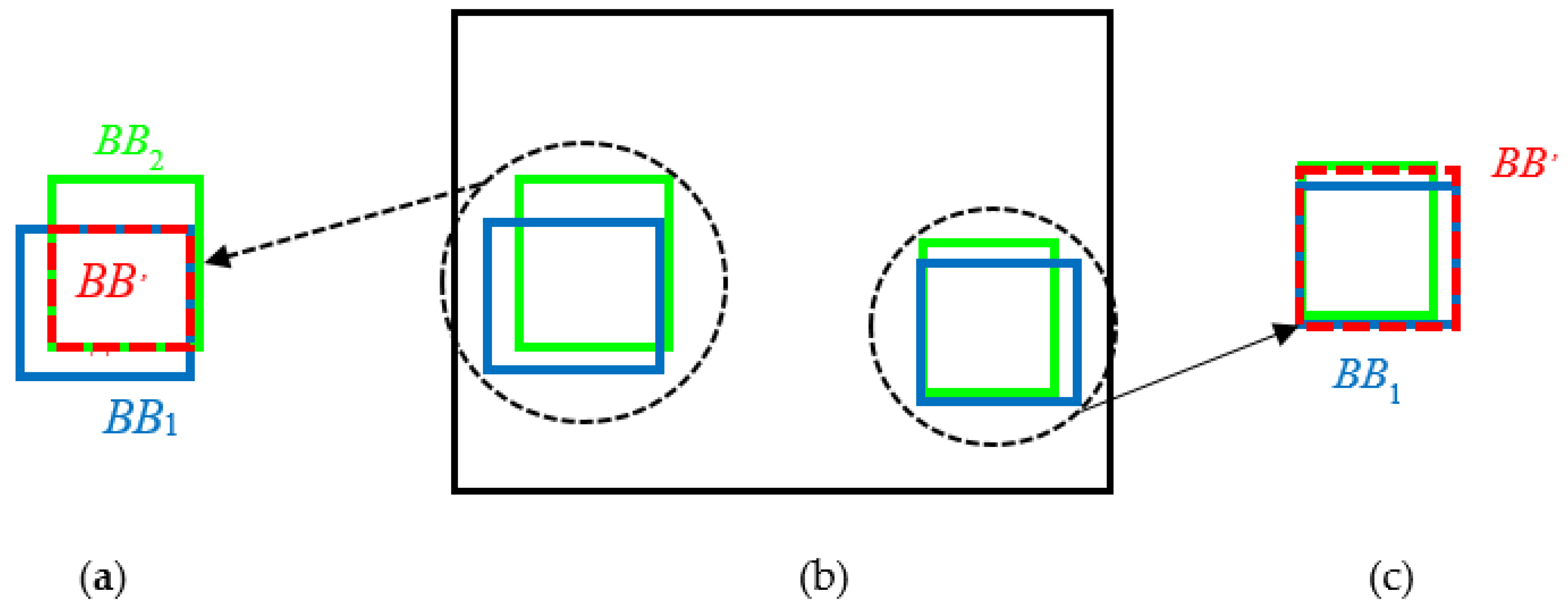
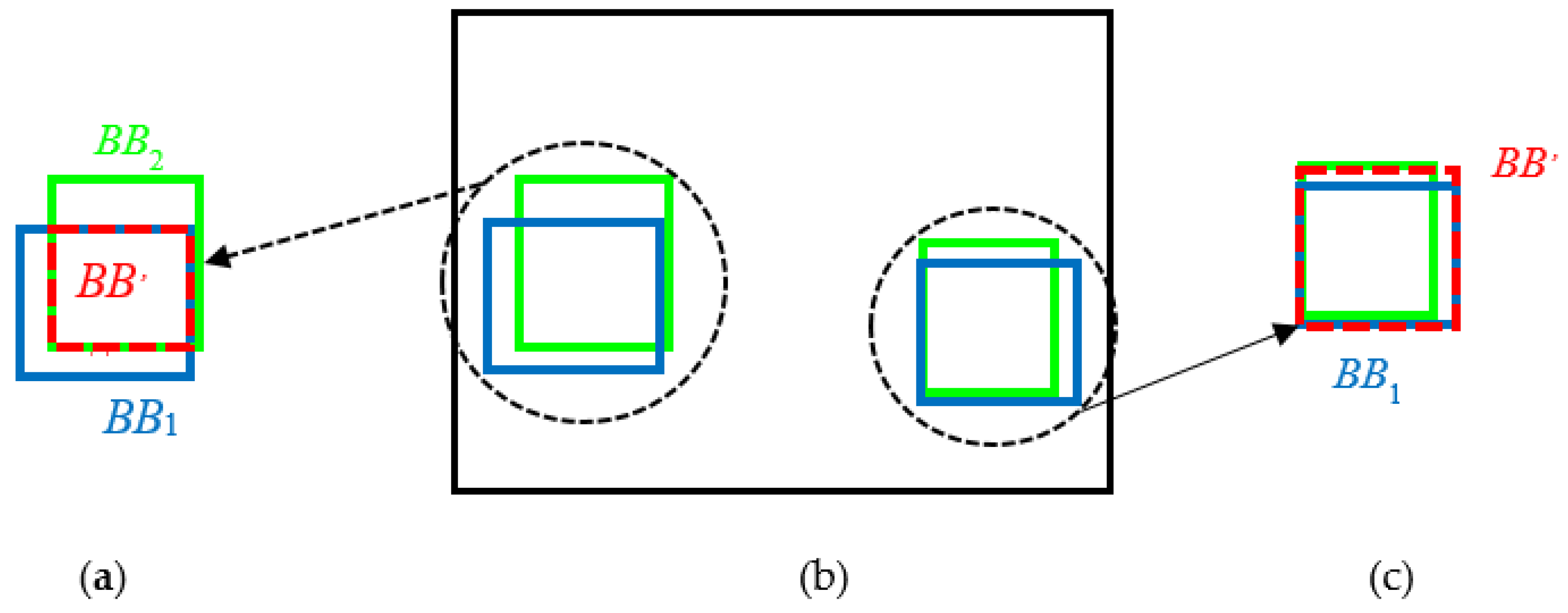
- When r12 = 0, it means that the two sets of border models (green and blue areas) do not completely overlap. At this time, the overlapping area is taken as the final detection model (red area). The fusion process is shown in Figure 5a,b.
- (2)
- When r12 = 1, it indicates that the two border models (green and blue areas) basically coincide with each other. At this time, all border model areas are valid and expanded to the standard border model (red area). The fusion process is shown in Figure 5b,c.
4.2. The Case of the Target Fusion Process
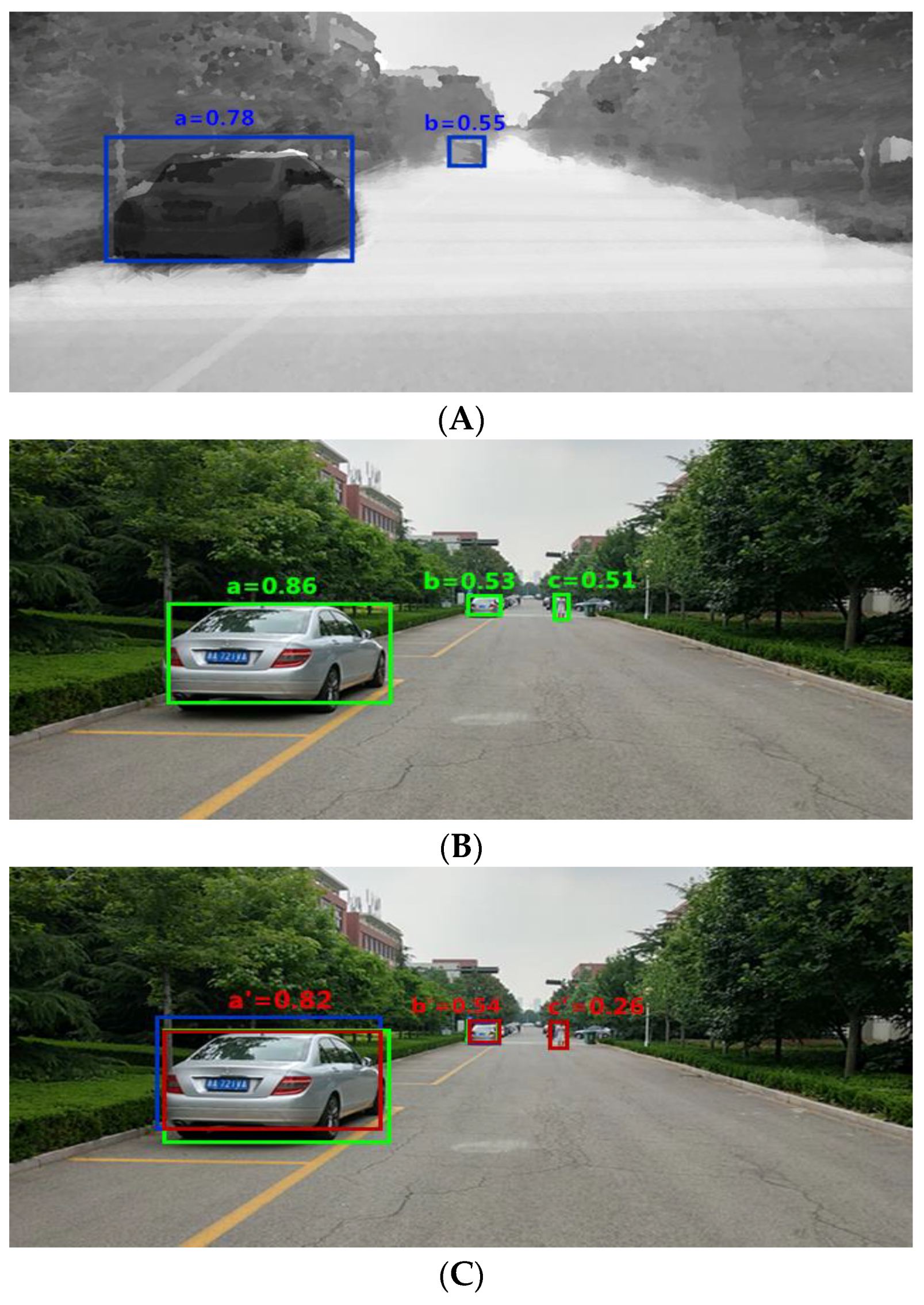
- (1)
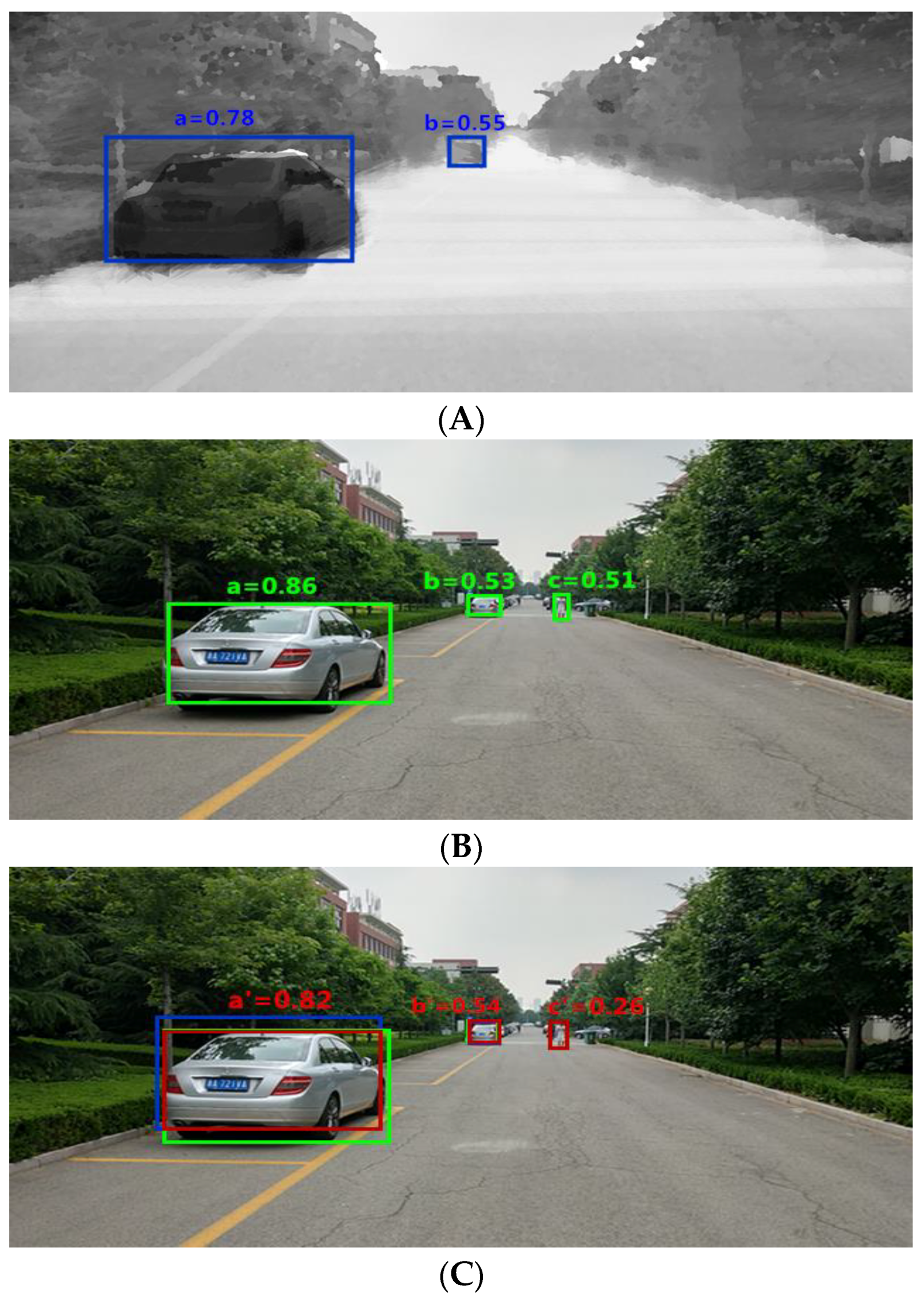
- Figure 6A is a processed depth image. It can be seen that the improved YOLO algorithm identifies two targets, a and b, and gives the confidence scores of 0.78 and 0.55, respectively.
- (2)
- Figure 6B is a color image. It can be seen that three targets, a, b, and c, are identified and the confidence scores are given as 0.86, 0.53 and 0.51, respectively.
- (3)
- The red box in Figure 6C is the final target model after fusion:
- (1)
- For target a, according to the decision-level fusion scheme, the result is obtained; then, the overlapping area is taken as the final detection model, and the confidence score after fusion is 0.82, as shown in Figure 6C (a’).
- (2)
- For target b, according to the decision-level fusion scheme, the result is obtained; then, the union of all regions is taken as the final detection model, and the confidence score after fusion is 0.54, as shown in Figure 6C (b’).
- (3)
- For target c, since there is no such information in Figure 6A, and Figure 6B identifies the pedestrian information on the right, according to the fusion rule, the bounding box information of c in Figure 6B is retained as the final output result, and the confidence score is kept as 0.51, as shown in Figure 6C (c’).
5. Results and Discussion
5.1. Conditional Configuration
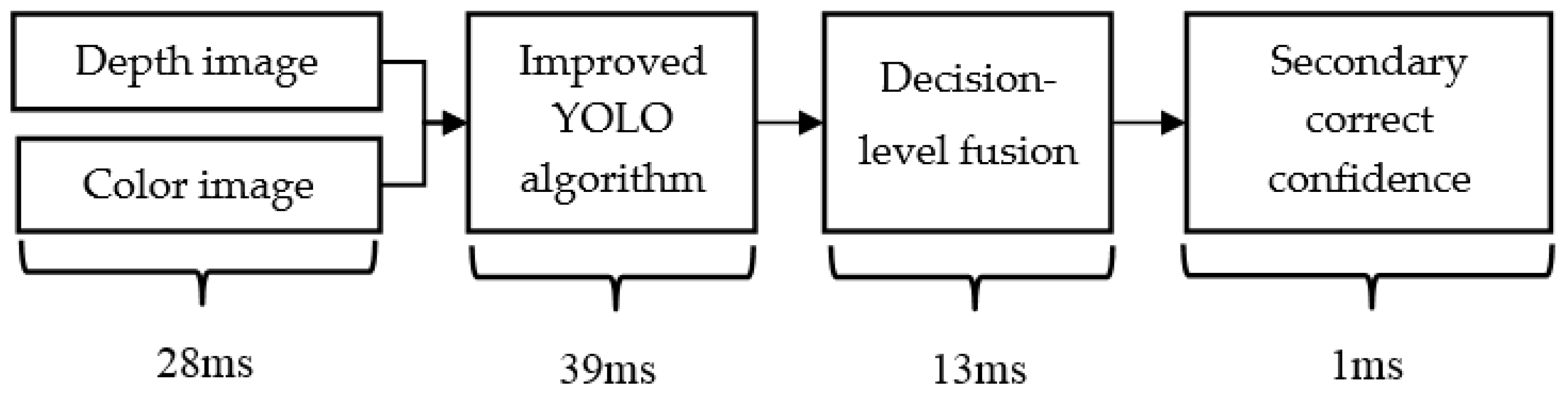
5.2. Time Performance Testing
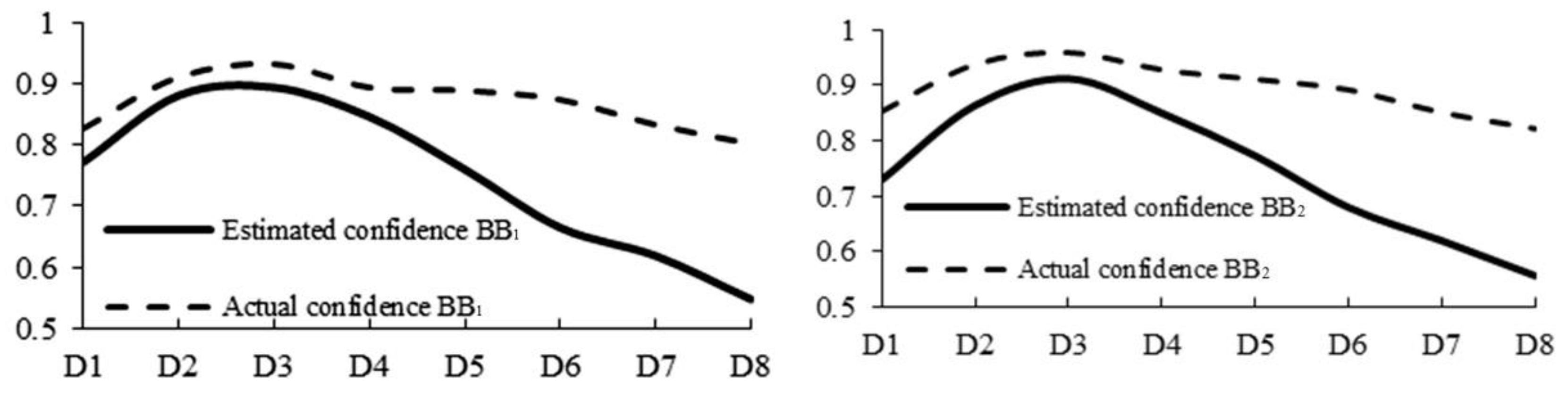
5.3. Training Model Parameters Analysis
5.4. Evaluation of Experiment Results
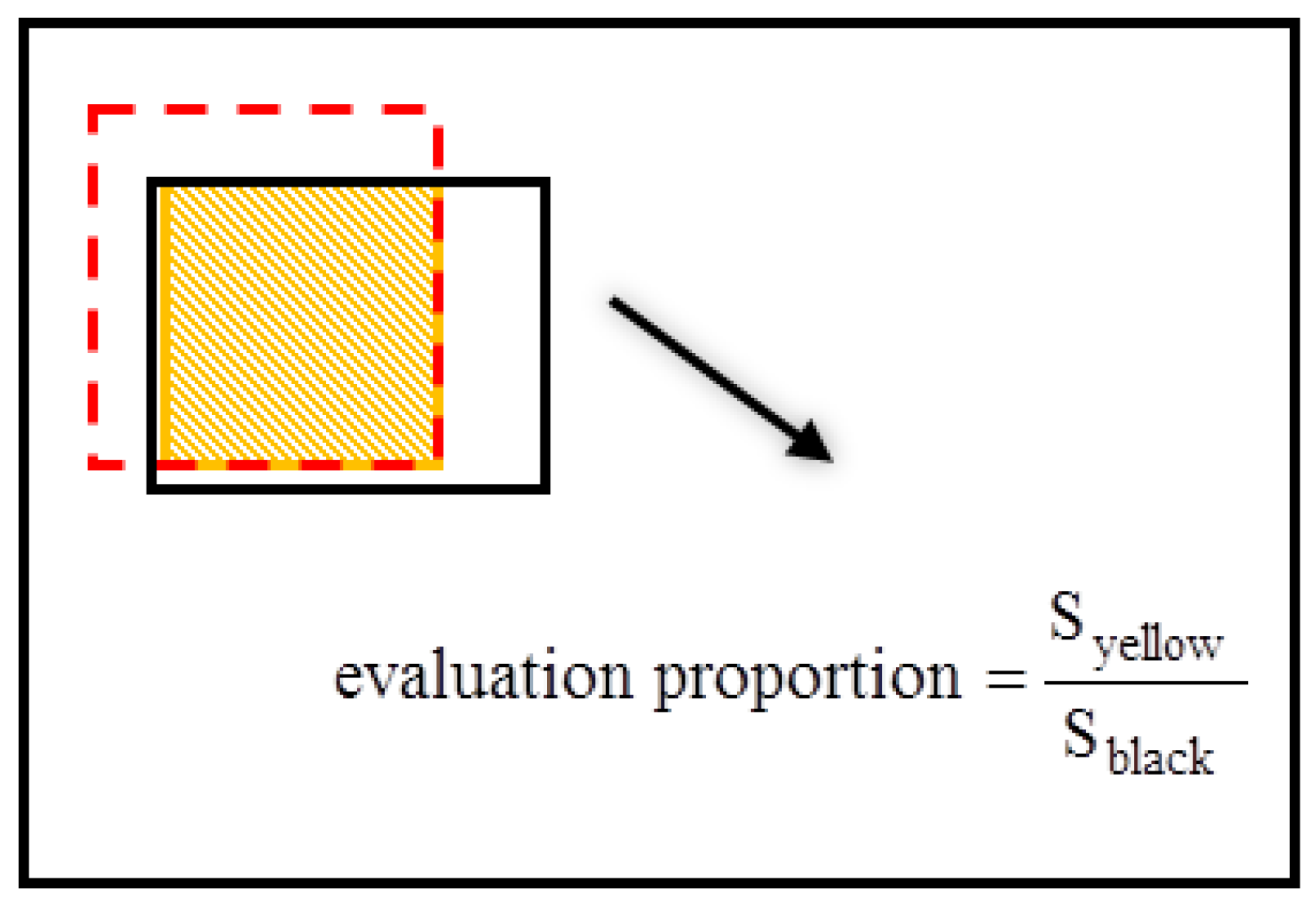
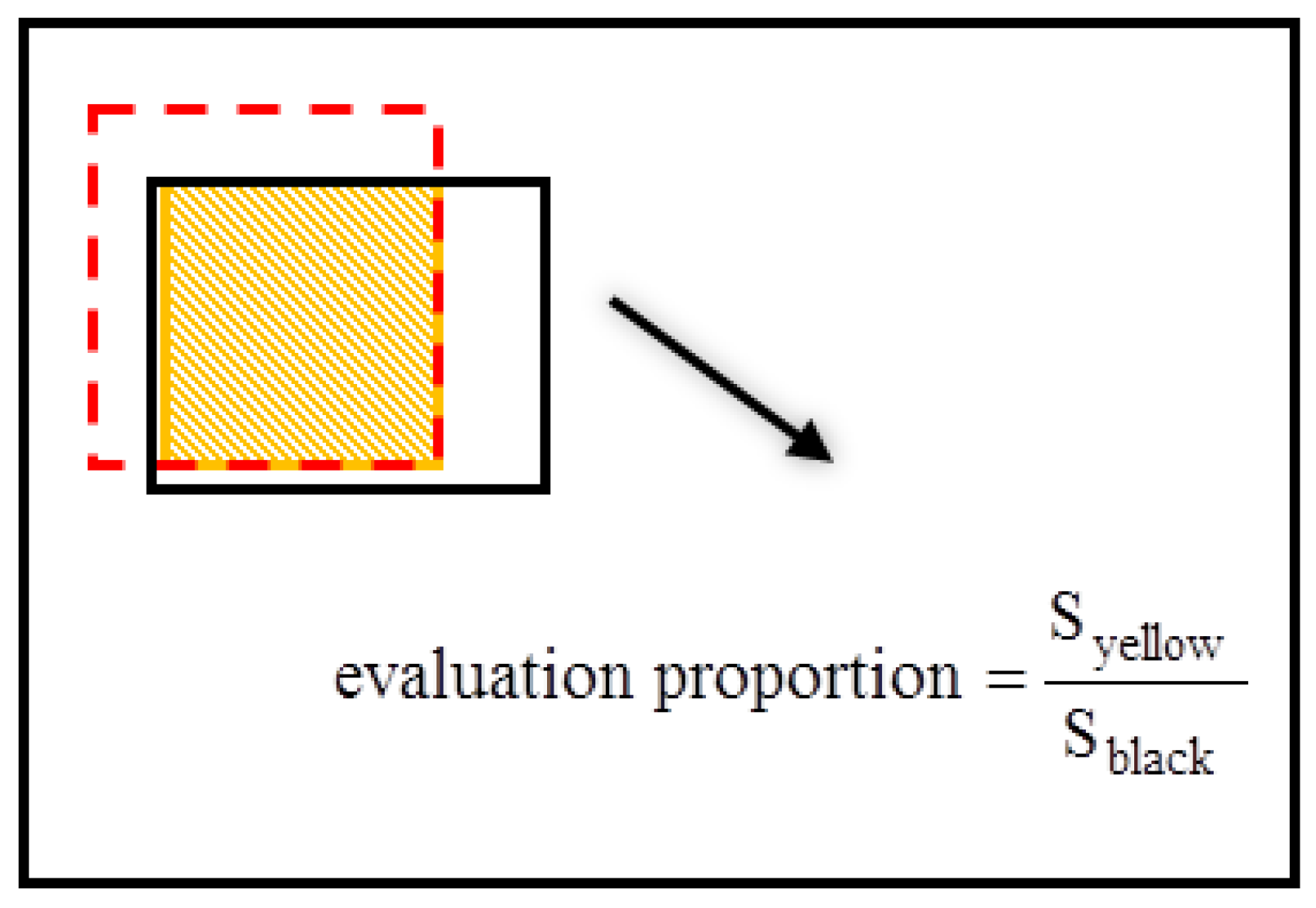
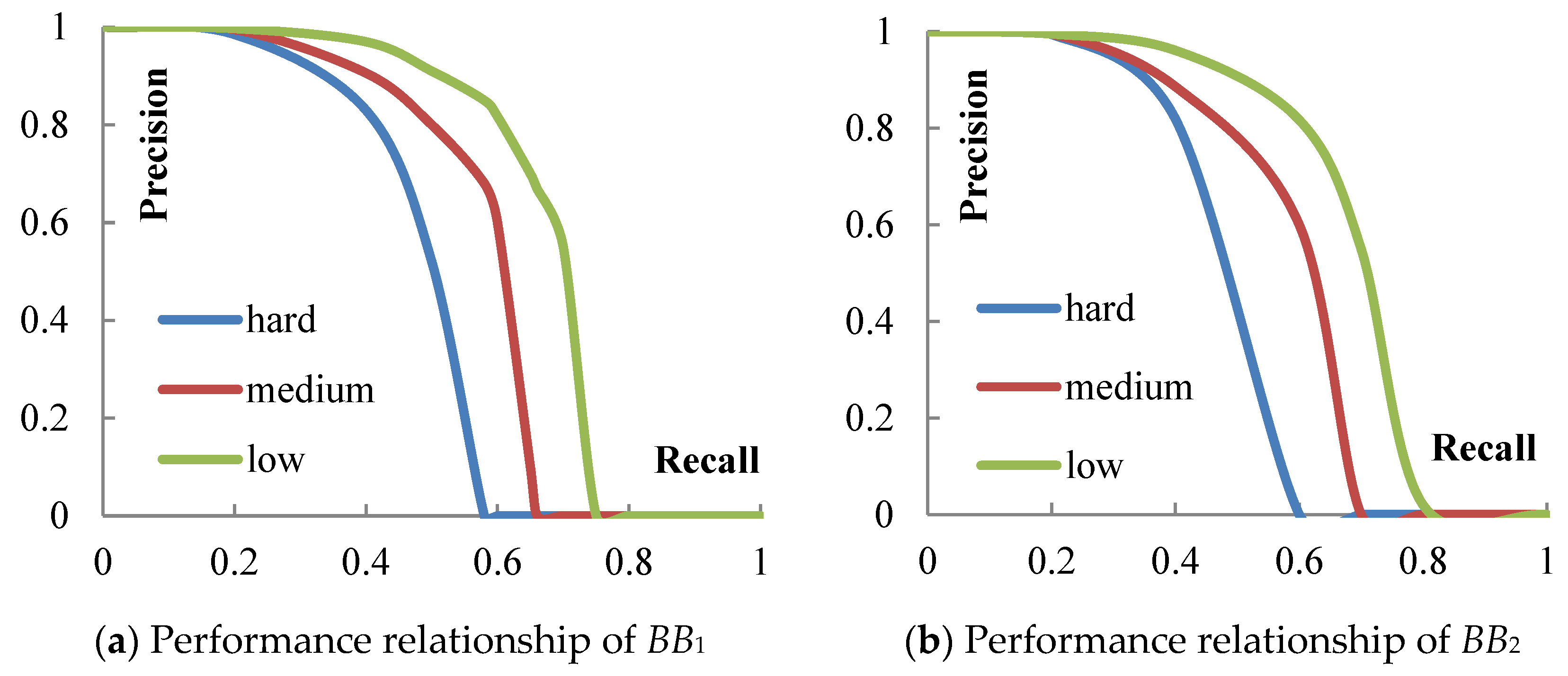
- (1)
- Low precision: Vehicle targets can be identified within the overlap area, and the identified effective area accounts for 60% of the model total area.
- (2)
- Medium precision: Vehicle targets are more accurately identified in overlapping areas, and the identified effective area accounts for 80% of the model’s total area.
- (3)
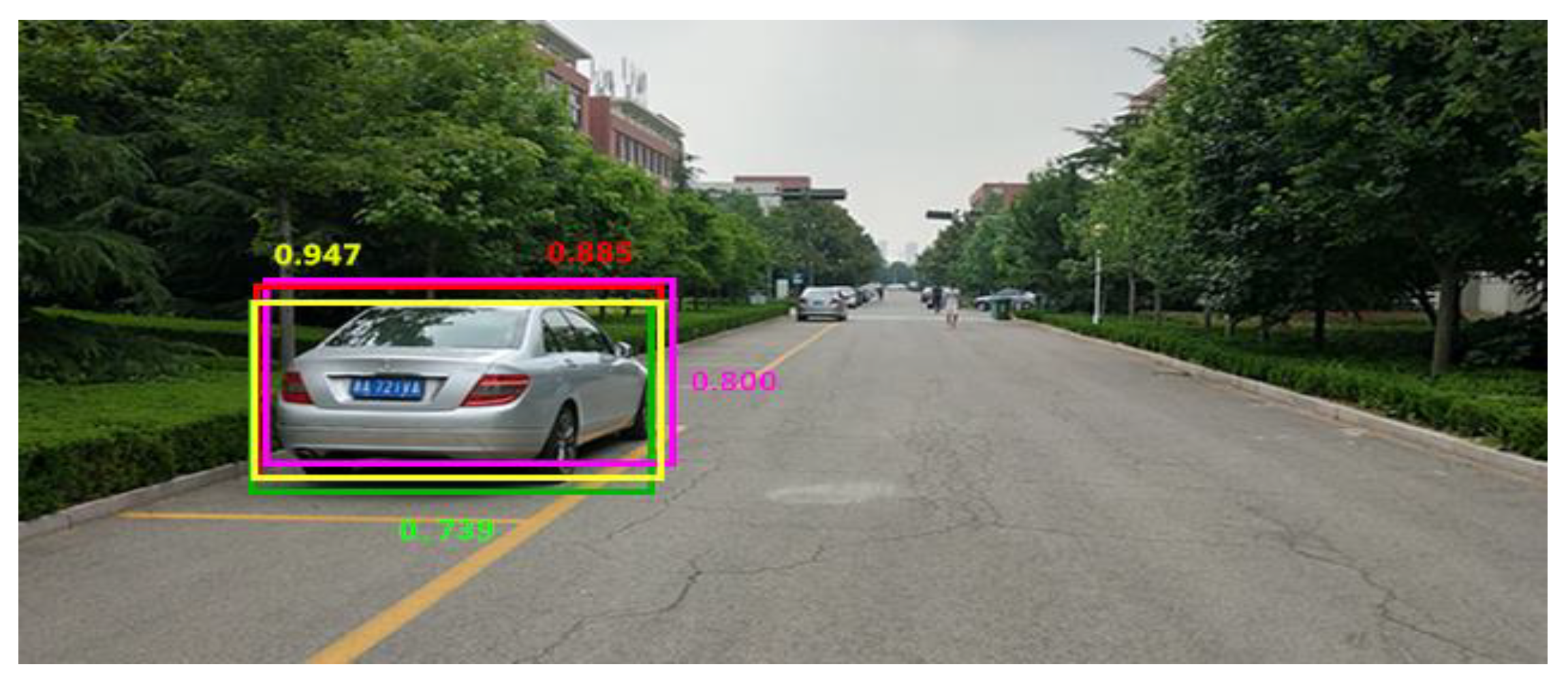
- High precision: The vehicle is accurately identified in the overlapping area, and the identified effective area accounts for 90% of the model total area. Figure 10 is used to describe the definition of evaluation grade. The red dotted frame area is the target actual area and the black frame area is the area BBi output from the model.
5.5. Method Comparison
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Batch Re-normalization of Real-Time Object Detection Algorithm YOLO. Available online: http://www.arocmag.com/article/02-2018-11-055.html (accessed on 10 November 2017).
- Liu, Y.; Zhang, Y.; Zhang, X. Adaptive spatial pooling for image classification. Pattern Recognit. 2016, 55, 58–67. [Google Scholar] [CrossRef]
- Gao, Z.; Li, S.B.; Chen, J.N.; Li, Z.J. Pedestrian detection method based on YOLO network. Comput. Eng. 2018, 44, 215–219, 226. [Google Scholar]
- Improved YOLO Feature Extraction Algorithm and Its Application to Privacy Situation Detection of Social Robots. Available online: http://kns.cnki.net/kcms/detail/11.2109.TP.20171212.0908.023.html (accessed on 12 December 2017).
- Nguyen, V.T.; Nguyen, T.B.; Chung, S.T. ConvNets and AGMM Based Real-time Human Detection under Fisheye Camera for Embedded Surveillance. In Proceedings of the 2016 International Conference on Information and Communication Technology Convergence (ICTC), Jeju, South Korea, 19–21 October 2016; pp. 840–845. [Google Scholar]
- Azim, A.; Aycard, O. Detection, Classification and Tracking of Moving Objects in a 3D Environment. In Proceedings of the IEEE Intelligent Vehicles Symposium, Alcala de Henares, Spain, 3–7 June 2012; pp. 802–807. [Google Scholar]
- Zhou, J.J.; Duan, J.M.; Yang, G.Z. A vehicle identification and tracking method based on radar ranging. Automot. Eng. 2014, 36, 1415–1420, 1414. [Google Scholar]
- Asvadi, A.; Premebida, C.; Peixoto, P.; Nunes, U. 3D Lidar-based static and moving obstacle detection in driving environments: An approach based on voxels and multi-region ground planes. Robot. Auton. Syst. 2016, 83, 299–311. [Google Scholar] [CrossRef]
- Asvadi, A.; Garrote, L.; Premebida, C.; Peixoto, P.; Nunes, U.J. Multimodal Vehicle Detection: Fusing 3D-LIDAR and Color Camera Data. Pattern Recognit. Lett. 2017. [Google Scholar] [CrossRef]
- Xue, J.R.; Wang, D.; Du, S.Y. A vision-centered multi-sensor fusing approach to self-localization and obstacle perception for robotic cars. Front. Inf. Technol. Electron. Eng. 2017, 18, 122–138. [Google Scholar] [CrossRef]
- Wang, X.Z.; Li, J.; Li, H.J.; Shang, B.X. Obstacle detection based on 3d laser scanner and range image for intelligent vehicle. J. Jilin Univ. (Eng. Technol. Ed.) 2016, 46, 360–365. [Google Scholar]
- Glennie, C.; Lichti, D.D. Static calibration and analysis of the Velodyne HDL-64E S2 for high accuracy mobile scanning. Remote Sens. 2010, 2, 1610–1624. [Google Scholar] [CrossRef]
- Yang, F.; Zhu, Z.; Gong, X.J.; Liu, J.L. Real-time dynamic obstacle detection and tracking using 3D lidar. J. Zhejiang Univ. 2012, 46, 1565–1571. [Google Scholar]
- Zhang, J.M.; Huang, M.T.; Jin, X.K.; Li, X.D. A real-time Chinese traffic sign detection algorithm based on modified YOLOv2. Algorithms 2017, 10, 127. [Google Scholar] [CrossRef]
- Han, F.; Yang, W.H.; Yuan, X.G. Multi-sensor Data Fusion Based on Correlation Function and Fuzzy Clingy Degree. J. Proj. Rocket. Missiles Guid. 2009, 29, 227–229, 234. [Google Scholar]
- Chen, F.Z. Multi-sensor data fusion mathematics. Math. Pract. Theory 1995, 25, 11–15. [Google Scholar]
- Redmon, J.; Divvala, S.; Girshick, R.; Farhadi, A. You Only Look Once: Unified, Real-Time Object Detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 779–788. [Google Scholar]
- Girshick, R. Fast R-CNN. In Proceedings of the 2015 IEEE International Conference on Computer Vision (ICCV), Santiago, Chile, 7–13 December 2015; pp. 1440–1448. [Google Scholar]
- Ren, S.; He, K.; Girshick, R. Faster R-CNN: Towards real-time object detection with region proposal networks. Int. Conf. Neural Inf. Process. Syst. 2015, 39, 91–99. [Google Scholar] [CrossRef] [PubMed]
- Wei, P.; Cagle, L.; Reza, T.; Ball, J.; Gafford, J. LiDAR and camera detection fusion in a real-time industrial multi-sensor collision avoidance system. Electronics 2018, 7, 84. [Google Scholar] [CrossRef]
- Li, B. 3D fully convolutional network for vehicle detection in point cloud. arXiv, 2017; arXiv:1611.08069. [Google Scholar]
- Voting for Voting in Online Point Cloud Object Detection. Available online: Https://www.researchgate.net/publication/314582192_Voting_for_Voting_in_Online_Point_Cloud_Object_Detection (accessed on 13 July 2015).


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor | Confidence Score (Detected Object from Left to Right) | ||
|---|---|---|---|
| a (a’) | b (b’) | c (c’) | |
| LiDAR | 0.78 | 0.55 | -- |
| Color camera | 0.86 | 0.53 | 0.51 |
| The fusion of both | 0.82 | 0.54 | 0.26 |
| Mark | Number of Steps | Estimated Confidence | Actual Confidence | Recognition Time (ms) |
|---|---|---|---|---|
| D1 | 4000 | 0.718 | 0.739 | 38.42 |
| D2 | 5000 | 0.740 | 0.771 | 38.40 |
| D3 | 6000 | 0.781 | 0.800 | 38.33 |
| D4 | 7000 | 0.825 | 0.842 | 38.27 |
| D5 | 8000 | 0.862 | 0.885 | 38.20 |
| D6 | 9000 | 0.899 | 0.923 | 38.12 |
| D7 | 10,000 | 0.923 | 0.947 | 38.37 |
| D8 | 20,000 | 0.940 | 0.885 | 38.50 |
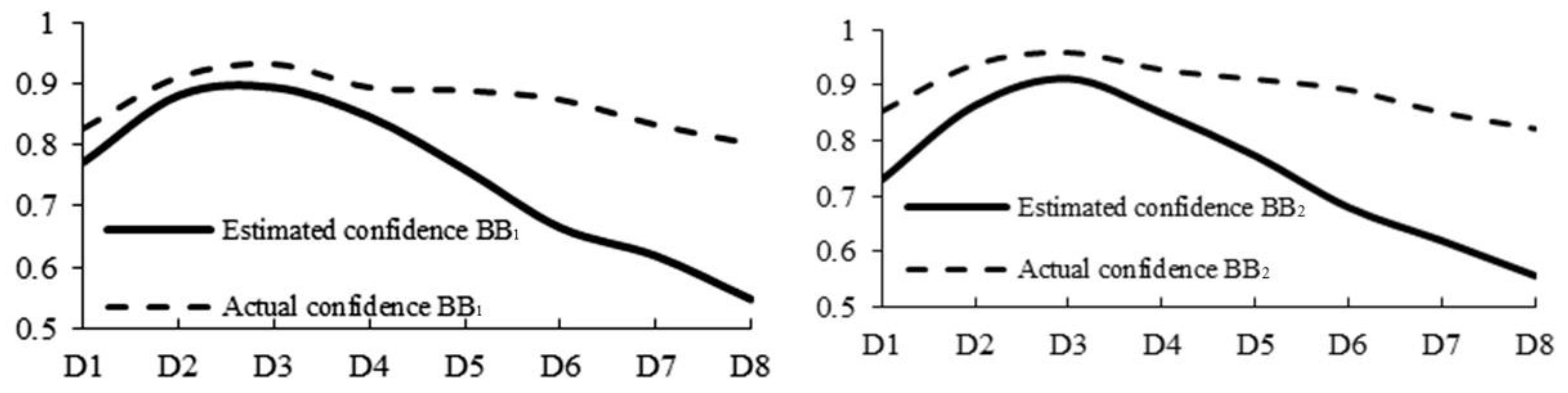
| Mark | Learning Rate | Estimated Confidence | Actual Confidence | ||
|---|---|---|---|---|---|
| BB1 | BB2 | BB1 | BB2 | ||
| D1 | 1 | 0.772 | 0.73 | 0.827 | 0.853 |
| D2 | 10−1 | 0.881 | 0.864 | 0.911 | 0.938 |
| D3 | 10−2 | 0.894 | 0.912 | 0.932 | 0.959 |
| D4 | 10−3 | 0.846 | 0.85 | 0.894 | 0.928 |
| D5 | 10−4 | 0.76 | 0.773 | 0.889 | 0.911 |
| D6 | 10−5 | 0.665 | 0.68 | 0.874 | 0.892 |
| D7 | 10−6 | 0.619 | 0.62 | 0.833 | 0.851 |
| D8 | 10−7 | 0.548 | 0.557 | 0.802 | 0.822 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Han, J.; Liao, Y.; Zhang, J.; Wang, S.; Li, S. Target Fusion Detection of LiDAR and Camera Based on the Improved YOLO Algorithm. Mathematics 2018, 6, 213. https://doi.org/10.3390/math6100213
Han J, Liao Y, Zhang J, Wang S, Li S. Target Fusion Detection of LiDAR and Camera Based on the Improved YOLO Algorithm. Mathematics. 2018; 6(10):213. https://doi.org/10.3390/math6100213
Chicago/Turabian StyleHan, Jian, Yaping Liao, Junyou Zhang, Shufeng Wang, and Sixian Li. 2018. "Target Fusion Detection of LiDAR and Camera Based on the Improved YOLO Algorithm" Mathematics 6, no. 10: 213. https://doi.org/10.3390/math6100213
APA StyleHan, J., Liao, Y., Zhang, J., Wang, S., & Li, S. (2018). Target Fusion Detection of LiDAR and Camera Based on the Improved YOLO Algorithm. Mathematics, 6(10), 213. https://doi.org/10.3390/math6100213