
From the Underdamped Generalized Elastic Model to the Single Particle Langevin Description


{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Underdamped Generalized Elastic Model
2.1. Generalized FD Relationship
2.2. Limiting Behaviours
- Short time limit: , i.e., , .This situation refer to the case where the fractional interactions among the system components are not yet sufficiently strong to affect the dynamics of the tracer. In this case the solution (12) takes the following form:which is the solution of an underdamped classical Langevin equation of a Brownian particle:
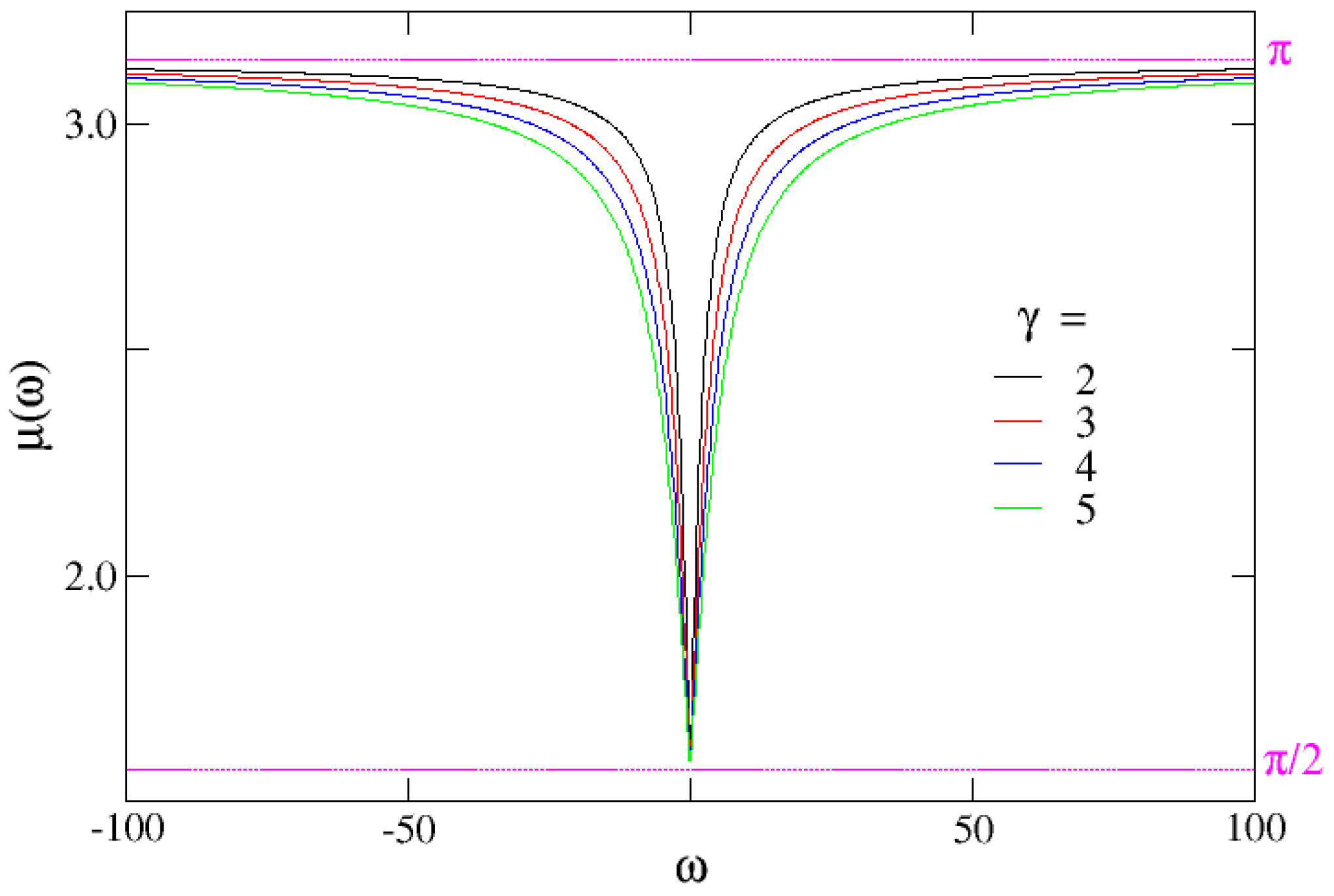
- Long time limit: , i.e., , .In this case the Fourier solution of the UGEM in Equation (12) can be written neglecting the inertia of the system:This limit entails that as it can be seen from the expression (30) and Figure 1. Consequently the phase tends to a constant: . Hence, from expression (36), after straightforward algebraic passages one obtains:which can be casted in the final form:Now, defining the constant prefactor [1,26]:the Equation (16) transforms to:where the Fourier transform of the noise propagator is:from Equation (15). Recalling that represents the Fourier transform of the the left side Riemann-Liouville derivative (6) with lower bound [4,27,29,31] and that is equivalent to the Caputo [37] derivative [27], i.e.:we can express in space-time domain the expression (45) recovering the FLE (5):The fractional Brownian noise on the RHS is defined by the Equation (18) via Equation (46).
3. Conclusions
Acknowledgments
Conflicts of Interest
Abbreviations
| GEM | Generalized elastic model |
| FD | Fluctuation-dissipation |
| RHS | Right-hand side |
| LHS | Left-hand side |
| GLE | Generalized Langevin equation |
| FLE | Fractional Langevin equation |
| UGEM | Underdamped generalized elastic model |
References
- Taloni, A.; Chechkin, A.; Klafter, J. Generalized elastic model yields a fractional Langevin equation description. Phys. Rev. Lett. 2010, 104, 160602. [Google Scholar] [CrossRef] [PubMed]
- Abramowitz, M.; Stegun, I.A. Handbook of Mathematical Functions: With Formulas, Graphs, and Mathematical Tables CONFIRMED; Courier Corporation: North Chelmsford, MA, USA, 1964; Volume 55. [Google Scholar]
- Saichev, A.I.; Zaslavsky, G.M. Fractional kinetic equations: Solutions and applications. Chaos Interdiscip. J. Nonlinear Sci. 1997, 7, 753–764. [Google Scholar] [CrossRef] [PubMed]
- Samko, S.G.; Kilbas, A.A.; Marichev, O.I. Fractional Integrals and Derivatives. Theory and Applications; Gordon and Breach: Yverdon, Switzerland, 1993. [Google Scholar]
- Doi, M.; Edwards, S.F. The Theory of Polymer Dynamics; Oxford University Press: Oxford, UK, 1988; Volume 73. [Google Scholar]
- Granek, R. From semi-flexible polymers to membranes: Anomalous diffusion and reptation. J. Phys. II 1997, 7, 1761–1788. [Google Scholar] [CrossRef]
- Farge, E.; Maggs, A.C. Dynamic scattering from semiflexible polymers. Macromolecules 1993, 26, 5041–5044. [Google Scholar] [CrossRef]
- Caspi, A.; Elbaum, M.; Granek, R.; Lachish, A.; Zbaida, D. Semiflexible polymer network: A view from inside. Phys. Rev. Lett. 1998, 80, 1106. [Google Scholar] [CrossRef]
- Amblard, F.; Maggs, A.C.; Yurke, B.; Pargellis, A.N.; Leibler, S. Subdiffusion and anomalous local viscoelasticity in actin networks. Phys. Rev. Lett. 1996, 77, 4470. [Google Scholar] [CrossRef] [PubMed]
- Edwards, S.F.; Wilkinson, D. The surface statistics of a granular aggregate. In Proceedings of the Royal Society of London A: Mathematical, Physical and Engineering Sciences; The Royal Society: London, UK, 1982; Volume 381, pp. 17–31. [Google Scholar]
- Rouse, P.E., Jr. A theory of the linear viscoelastic properties of dilute solutions of coiling polymers. J. Chem. Phys. 1953, 21, 1272–1280. [Google Scholar] [CrossRef]
- Zimm, B.H. Dynamics of polymer molecules in dilute solution: Viscoelasticity, flow birefringence and dielectric loss. J. Chem. Phys. 1956, 24, 269–278. [Google Scholar] [CrossRef]
- Freyssingeas, É.; Roux, D.; Nallet, F. Quasi-Elastic Light Scattering Study of Highly Swollen Lamellar and Sponge. J. Phys. II 1997, 7, 913–929. [Google Scholar] [CrossRef]
- Helfer, E.; Harlepp, S.; Bourdieu, L.; Robert, J.; MacKintosh, F.; Chatenay, D. Microrheology of biopolymer-membrane complexes. Phys. Rev. Lett. 2000, 85, 457. [Google Scholar] [CrossRef] [PubMed]
- Granek, R.; Klafter, J. Anomalous motion of membranes under a localized external potential. EPL (Europhys. Lett.) 2001, 56, 15. [Google Scholar] [CrossRef]
- Zilman, A.G.; Granek, R. Membrane dynamics and structure factor. Chem. Phys. 2002, 284, 195–204. [Google Scholar] [CrossRef]
- Zilman, A.; Granek, R. Dynamics of fractal sol-gel polymeric clusters. Phys. Rev. E 1998, 58, R2725. [Google Scholar] [CrossRef]
- Majumdar, S.N.; Bray, A.J. Spatial persistence of fluctuating interfaces. Phys. Rev. Lett. 2001, 86, 3700. [Google Scholar] [CrossRef] [PubMed]
- Majaniemi, S.; Ala-Nissila, T.; Krug, J. Kinetic roughening of surfaces: Derivation, solution, and application of linear growth equations. Phys. Rev. B 1996, 53, 8071. [Google Scholar] [CrossRef]
- Searson, P.; Li, R.; Sieradzki, K. Surface diffusion in the solid-on-solid model. Phys. Rev. Lett. 1995, 74, 1395. [Google Scholar] [CrossRef] [PubMed]
- Krug, J. Origins of scale invariance in growth processes. Adv. Phys. 1997, 46, 139–282. [Google Scholar] [CrossRef]
- Toroczkai, Z.; Williams, E.D. Nanoscale fluctuations at solid surfaces. Phys. Today 1999, 52, 24–28. [Google Scholar] [CrossRef]
- Gao, H.; Rice, J.R. A first-order perturbation analysis of crack trapping by arrays of obstacles. J. Appl. Mech. 1989, 56, 828–836. [Google Scholar] [CrossRef]
- Joanny, J.; De Gennes, P.G. A model for contact angle hysteresis. J. Chem. Phys. 1984, 81, 552–562. [Google Scholar] [CrossRef]
- Taloni, A.; Chechkin, A.; Klafter, J. Unusual response to a localized perturbation in a generalized elastic model. Phys. Rev. E 2011, 84, 021101. [Google Scholar] [CrossRef] [PubMed]
- Taloni, A.; Chechkin, A.; Klafter, J. Correlations in a generalized elastic model: Fractional Langevin equation approach. Phys. Rev. E 2010, 82, 061104. [Google Scholar] [CrossRef] [PubMed]
- Podlubny, I. Fractional Differential Equations: An Introduction to Fractional Derivatives, Fractional Differential Equations, to Methods of Their Solution and Some of Their Applications; Academic Press: Cambridge, MA, USA, 1998; Volume 198. [Google Scholar]
- Taloni, A.; Chechkin, A.; Klafter, J. Generalized elastic model: Thermal vs. non-thermal initial conditions—Universal scaling, roughening, ageing and ergodicity. EPL (Europhys. Lett.) 2012, 97, 30001. [Google Scholar] [CrossRef]
- Taloni, A.; Chechkin, A.; Klafter, J. Generalized elastic model: Fractional Langevin description, fluctuation relation and linear response. Math. Model. Nat. Phenom. 2013, 8, 127–143. [Google Scholar] [CrossRef]
- Taloni, A.; Lomholt, M.A. Langevin formulation for single-file diffusion. Phys. Rev. E 2008, 78, 051116. [Google Scholar] [CrossRef] [PubMed]
- Taloni, A. Kubo Fluctuation Relations in the Generalized Elastic Model. Adv. Math. Phys. 2016, 2016, 7502472. [Google Scholar] [CrossRef]
- Mori, H. A quantum-statistical theory of transport processes. J. Phys. Soc. Jpn. 1956, 11, 1029–1044. [Google Scholar] [CrossRef]
- Mori, H. A continued-fraction representation of the time-correlation functions. Prog. Theor. Phys. 1965, 34, 399–416. [Google Scholar] [CrossRef]
- Mori, H. Transport, collective motion, and Brownian motion. Prog. Theor. Phys. 1965, 33, 423–455. [Google Scholar] [CrossRef]
- Gradshtein, I.S.; Ryzhik, I.M. Tables of Integrals, Sums, Series, and Products; Academic Press: Cambridge, MA, USA, 1971. [Google Scholar]
- Wiener, N. Extrapolation, Interpolation, and Smoothing of Stationary Time Series; MIT Press Cambridge: Cambridge, MA, USA, 1949; Volume 2. [Google Scholar]
- Caputo, M. Linear models of dissipation whose Q is almost frequency independent—II. Geophys. J. Int. 1967, 13, 529–539. [Google Scholar] [CrossRef]

© 2017 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license ( http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Taloni, A. From the Underdamped Generalized Elastic Model to the Single Particle Langevin Description. Mathematics 2017, 5, 3. https://doi.org/10.3390/math5010003
Taloni A. From the Underdamped Generalized Elastic Model to the Single Particle Langevin Description. Mathematics. 2017; 5(1):3. https://doi.org/10.3390/math5010003
Chicago/Turabian StyleTaloni, Alessandro. 2017. "From the Underdamped Generalized Elastic Model to the Single Particle Langevin Description" Mathematics 5, no. 1: 3. https://doi.org/10.3390/math5010003
APA StyleTaloni, A. (2017). From the Underdamped Generalized Elastic Model to the Single Particle Langevin Description. Mathematics, 5(1), 3. https://doi.org/10.3390/math5010003