
Optimized Integral Super-Twisting Sliding Mode Control for Acute Leukemia Therapy


Abstract
1. Introduction
- 1.
- A novel Integral Super-Twisting Sliding Mode Controller (ISTSMC) is proposed, providing convergence and enhanced robustness.
- 2.
- The RedFox algorithm is introduced to improve the tracking performance and efficiency of the ISTSMC.
- 3.
- A comprehensive comparative evaluation of nonlinear controllers, including Integral Super-Twisting Sliding Mode Control (ISTSMC), Sliding Mode Control (SMC), and Synergetic Control (SC) is presented.
2. The Problem Statement
- : the maximum possible number of healthy cells;
- : the maximum possible number of leukemic (diseased) cells;
- : the replication rates of normal cells;
- : the replication rates of leukemic cells;
- : the death rates of healthy and diseased cells, respectively;
- , : the therapy functions describe the effect of the drug on normal and leukemia cells, respectively;
- : the drug dissipation;
- c: the constant describes the interaction (competition) between normal and diseased cells;
- : the control function that can be looked upon as the quantity of the drug administered to a patient at moment t.
3. Controller Framework
3.1. Integral Super-Twisting Sliding Mode Control
3.2. Sliding Mode Control
3.3. Synergetic Control
4. RedFox Optimization Algorithm
- Exploration and Exploitation Balance: RedFox emphasizes the dynamic adjustment between broad exploration of the search space (searching for new and better solutions) and exploitation (refining the solutions found so far).
- Position Update Mechanism: The algorithm’s search process is based on the metaphor of a red fox searching for food while avoiding predators. This adaptive mechanism allows it to efficiently find global solutions without becoming stuck in local optima.
- Adaptive Parameters: The RedFox algorithm adapts its search strategy during the optimization process, allowing it to effectively navigate both smooth and rugged landscapes, making it well-suited for optimizing nonlinear control parameters.
- Convergence Rate: The algorithm can converge quickly, especially when fine-tuned, making it useful for real-time applications like leukemia therapy, where time is of the essence.
4.1. Methodology: RedFox Algorithm for Optimizing Nonlinear Control
4.1.1. Initialization
4.1.2. Objective Function Definition
- is the output of the system (e.g., drug concentration, cell count);
- is the reference trajectory;
- is the control input (e.g., drug dose);
- is the tracking error;
- are weighting coefficients; and
- T is the time horizon for performance evaluation.
4.1.3. RedFox Algorithm Execution
- Exploration Phase: The algorithm starts by exploring a wide solution space, trying to locate regions where optimal solutions may lie. During this phase, RedFox samples solutions from various areas to identify promising regions of the search space.
- Exploitation Phase: Once promising solutions are found, the RedFox algorithm refines them by focusing on local areas of the search space. This phase narrows down the search to optimize the most promising candidate solutions.
- Balance Adjustment: The algorithm dynamically adjusts its exploration–exploitation balance based on the feedback from the objective function. If the algorithm encounters a region where further refinement is beneficial, it increases the exploitation phase. Otherwise, it continues exploring new areas of the search space.
4.1.4. Parameter Optimization
- Selection: A subset of solutions is chosen based on their fitness values. These selected solutions serve as the foundation for generating the next generation of candidates.
- Crossover: New solutions are produced by combining elements from two parent solutions. This recombination process enables the algorithm to explore new regions of the solution space by merging advantageous characteristics from different individuals.
- Mutation: Random modifications are introduced to certain solutions, ensuring diversity in the population and reducing the risk of the algorithm converging prematurely to a suboptimal solution.
4.1.5. Simulation and Validation
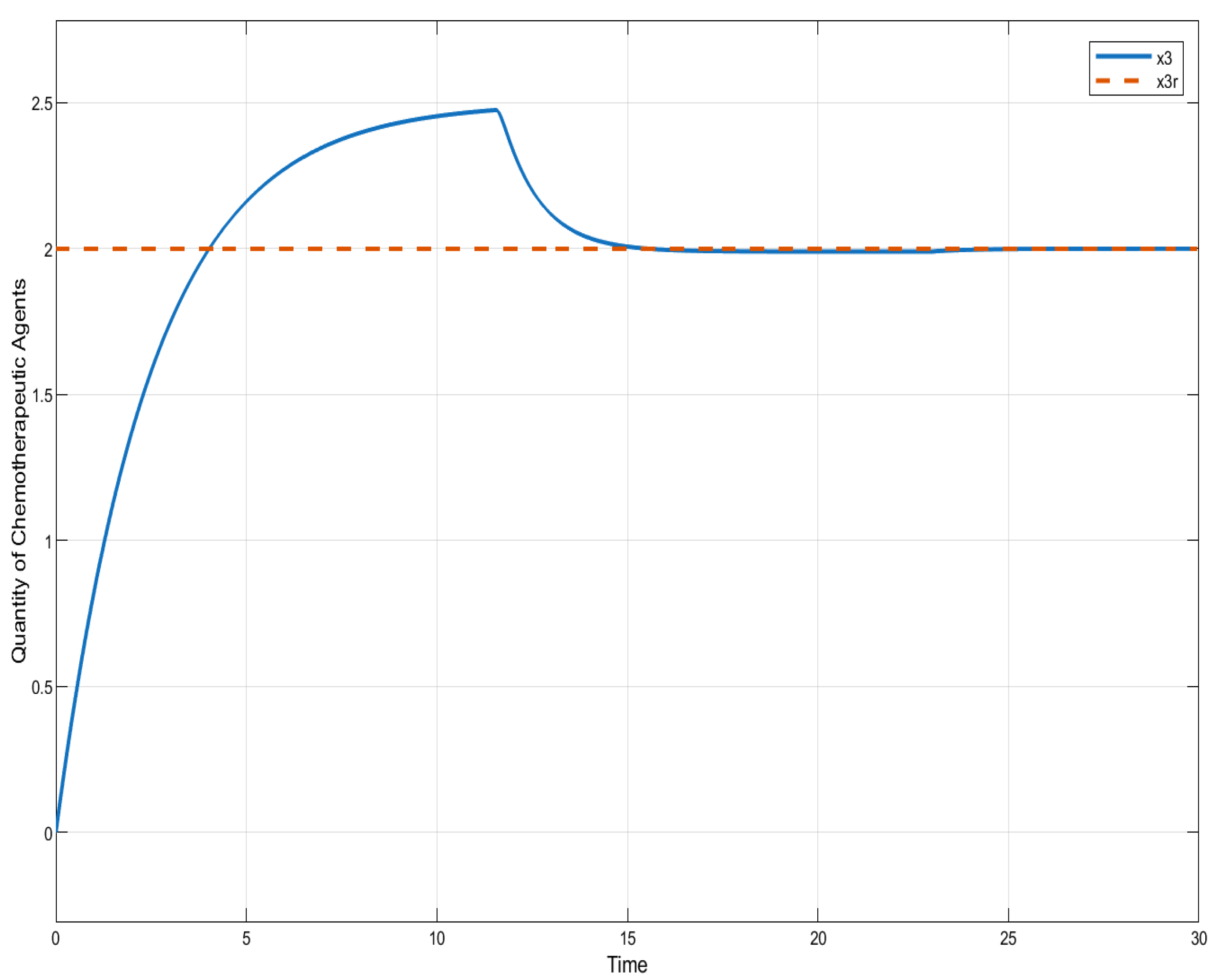
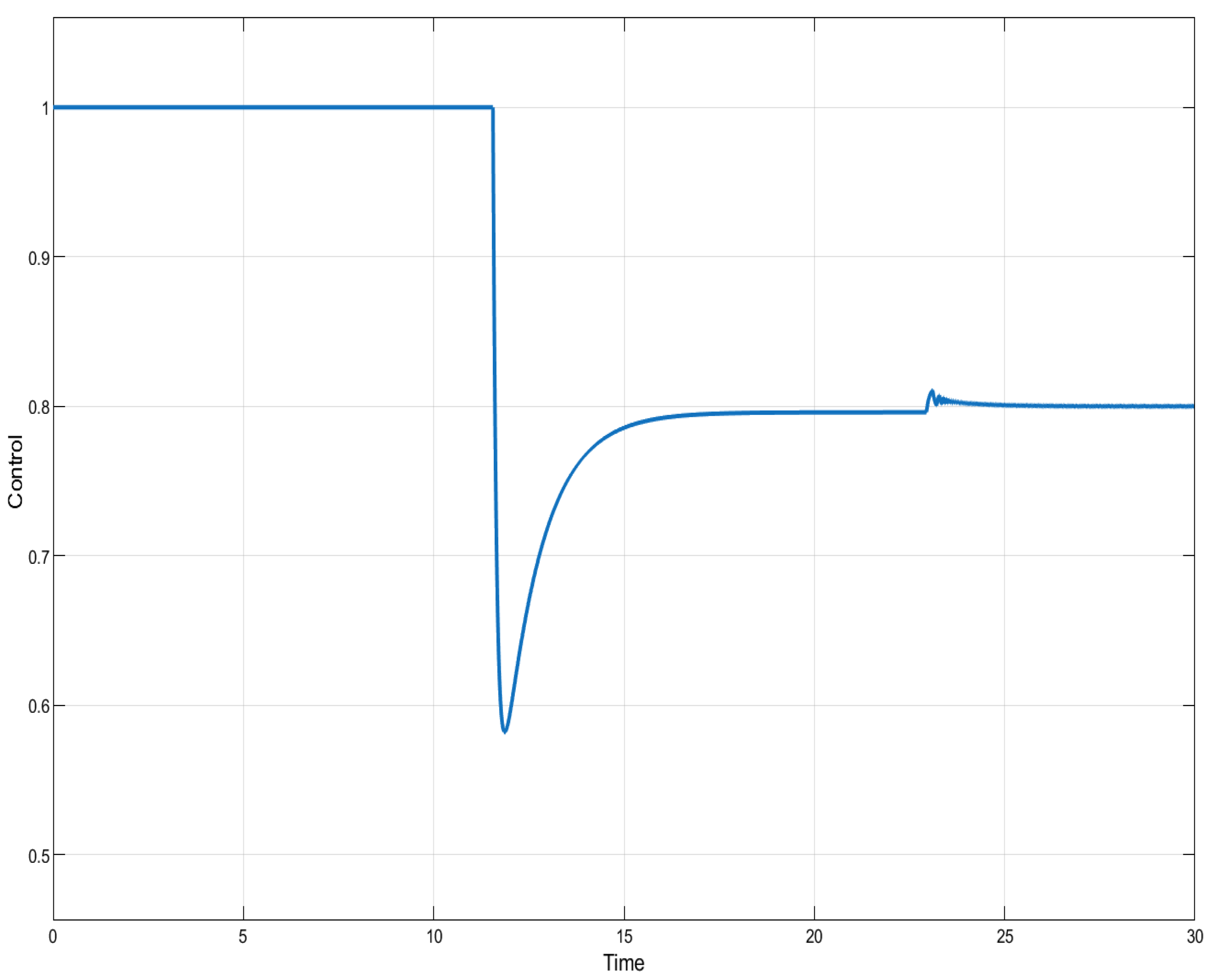
5. Simulations
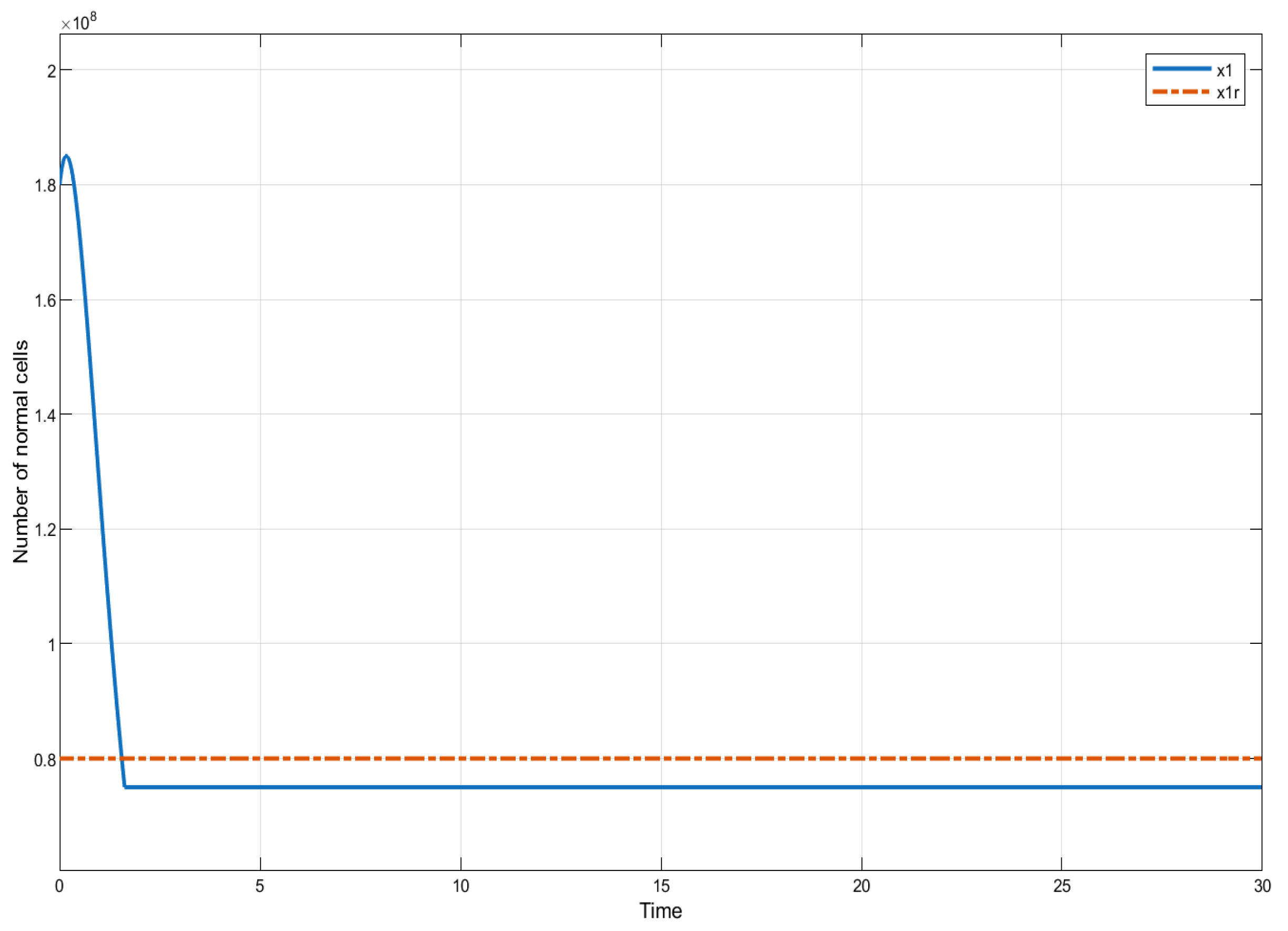
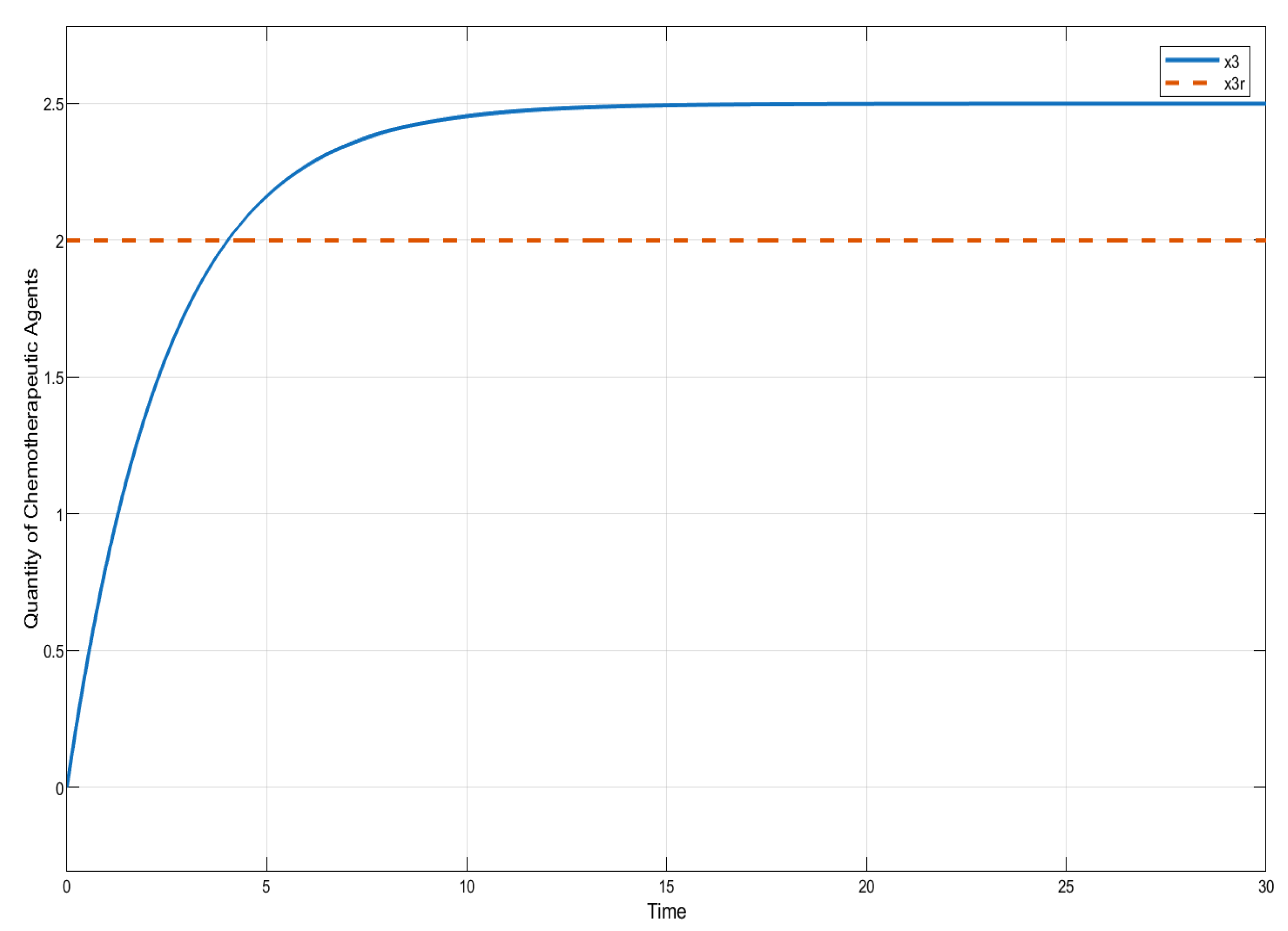
5.1. Monotonic Therapy
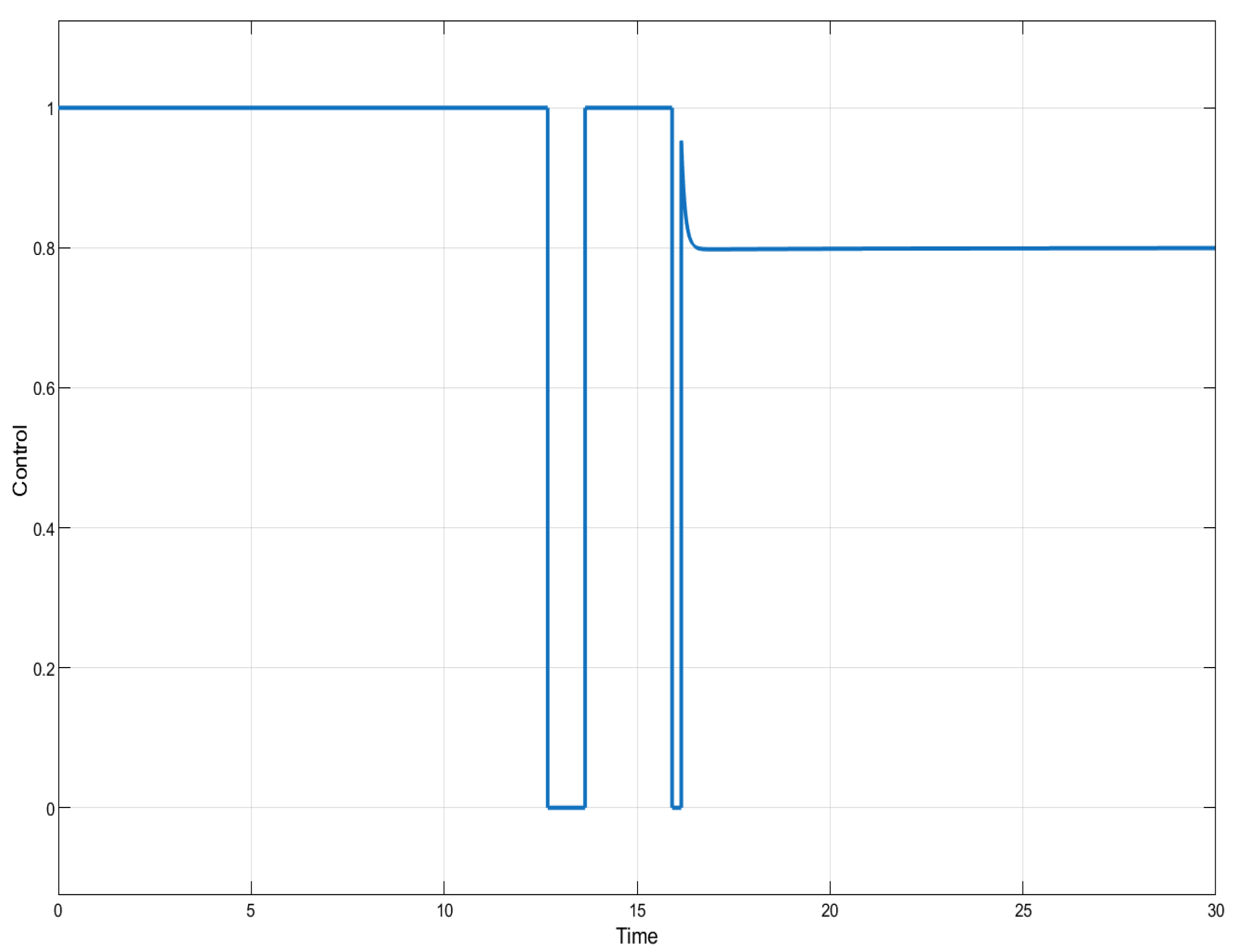
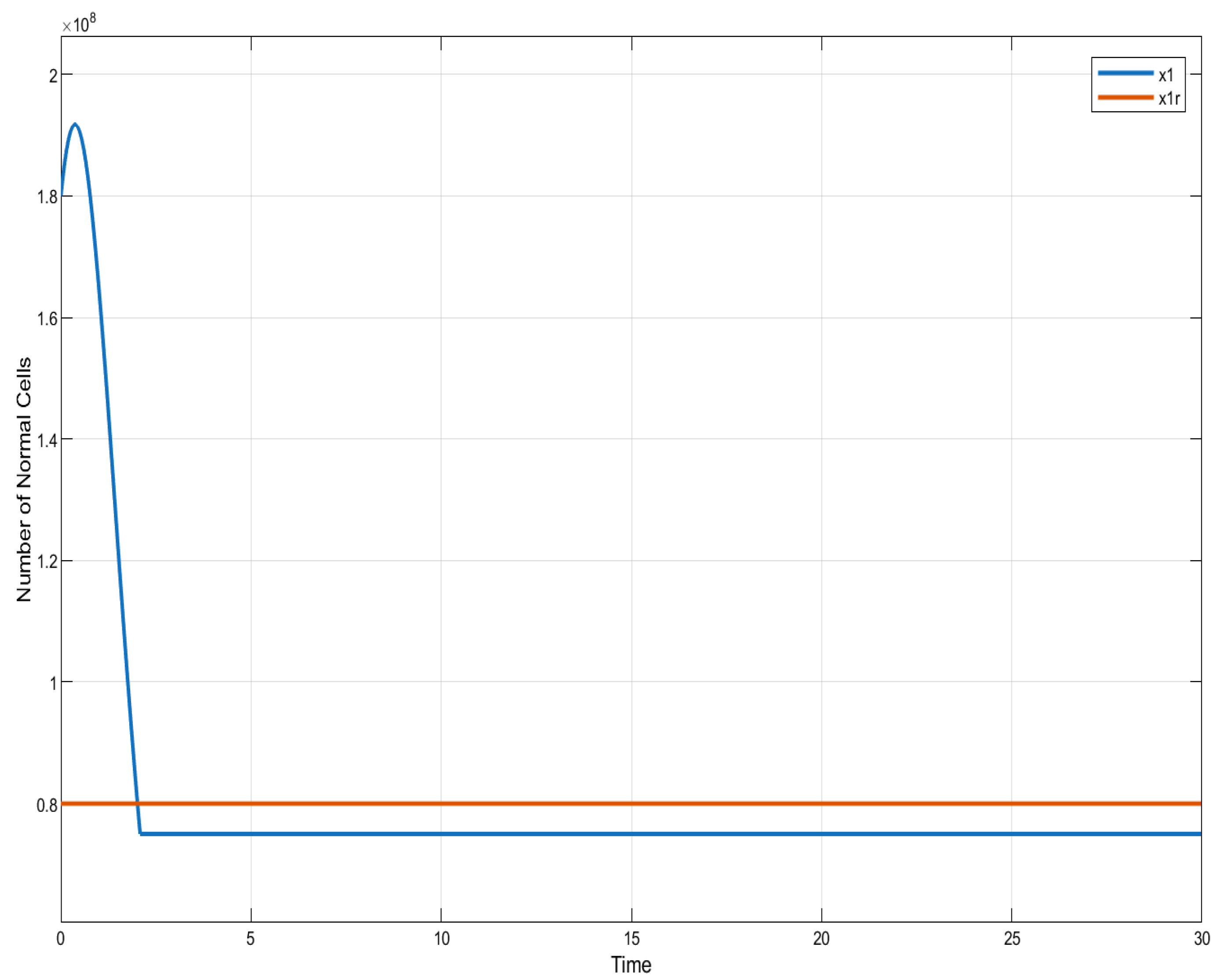
5.2. Non-Monotonic Therapy
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| ISTSMC | Integral Super-Twisting Sliding Mode Control |
| SMC | Sliding Mode Control |
| SC | Synergetic Control |
| PSO | Particle Swarm Optimization |
| GA | Genetic Algorithm |
| RFA | RedFox Algorithm |
| AML | Acute Myeloid Leukemia |
| ALL | Acute Lymphoblastic Leukemia |
| NCI | National Cancer Institute |
| CML | Chronic Myeloid Leukemia |
| Na | Maximum possible number of healthy cells |
| La | Maximum possible number of leukemic cells |
| Replication rate of normal cells | |
| Replication rate of leukemic cells | |
| Death rate of healthy cells | |
| Death rate of leukemic cells | |
| Drug dissipation rate | |
| Therapy function describing drug effect on normal cells | |
| Therapy function describing drug effect on leukemic cells | |
| Maximum amount of chemotherapy administered at a given time | |
| Total cumulative chemotherapy dosage | |
| State variables representing normal cells, leukemic cells, and drug concentration | |
| Control function representing drug dosage | |
| V | Lyapunov function |
| T | Convergence rate of states |
| S | Sliding surface |
References
- Afenya, E. Mathematical models of cancer and their relevant insights. In Handbook of Cancer Models with Applications; Series in Mathematical Biology and Medicine; World Scientific: Hackensack, NJ, USA, 2008; Volume 9, pp. 173–223. [Google Scholar]
- Araujo, R. A history of the study of solid tumor growth: The contribution of mathematical modelling. Bull. Math. Biol. 2004, 66, 1039–1091. [Google Scholar] [PubMed]
- Chakrabarty, A.; Pearce, S.M.; Nelson, R.P.; Rundell, A.E. Treating acute myeloid leukemia via HSC transplantation: A preliminary study of multi-objective personalization strategies. In Proceedings of the 2013 American Control Conference, Washington, DC, USA, 17–19 June 2013; pp. 3790–3795. [Google Scholar]
- Mayo Clinic Staff. Cancer. Mayo Clinic. Available online: https://www.mayoclinic.org/diseasesconditions/cancer/symptoms-causes/syc-20370588 (accessed on 5 February 2025).
- How Is Leukemia Diagnosed? Available online: https://www.health.com (accessed on 5 February 2025).
- Chulián, S.; Rubio, Á.M.; Rosa, M.; Pérez-García, V.M. Mathematical models of Leukaemia and its treatment: A review. SeMA J. 2022, 79, 441–486. [Google Scholar]
- Rădulescu, I.R.; Cândea, D.; Halanay, A. Optimal control analysis of a leukemia model under imatinib treatment. Math. Comput. Simul. 2016, 121, 1–11. [Google Scholar]
- Todorov, Y.; Fimmel, E.; Bratus, A.S.; Semenov, Y.S.; Nuernberg, F. An optimal strategy for leukemia therapy: A multi-objective approach. Russ. J. Numer. Anal. Math. Model. 2012, 26, 589–604. [Google Scholar]
- Sharp, J.A.; Browning, A.P.; Mapder, T.; Burrage, K.; Simpson, M.J. Optimal control of acute myeloid leukaemia. J. Theoret. Biol. 2019, 470, 30–42. [Google Scholar]
- Nanda, S.; Moore, H.; Lenhart, S. Optimal control of treatment in a mathematical model of chronic myelogenous leukemia. Math. Biosci. 2007, 210, 143–156. [Google Scholar] [PubMed]
- Ahmad, S.; NasimUllah; Ahmed, N.; Ilyas, M.; Khan, W. Super twisting sliding mode control algorithm for developing artificial pancreas in type 1 diabetes patients. Biomed. Signal Process. Control 2017, 38, 200–211. [Google Scholar]
- Dey, B.S.; Bera, M.K.; Roy, B.K. Super twisting sliding mode control of cancer chemotherapy. In Proceedings of the 2018 15th International Workshop on Variable Structure Systems (VSS), Graz, Austria, 9–11 July 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 343–348. [Google Scholar]
- Hernández, A.G.G.; Fridman, L.; Levant, A.; Shtessel, Y.; Leder, R.; Monsalve, C.R.; Andrade, S.I. High-order sliding-mode control for blood glucose: Practical relative degree approach. Control Eng. Pract. 2013, 21, 747–758. [Google Scholar] [CrossRef]
- Firouzi, M.; Nasiri, M.; Mobayen, S.; Gharehpetian, G.B. Sliding Mode Controller-Based BFCL for Fault Ride-Through Performance Enhancement of DFIG-Based Wind Turbines. Complexity 2020, 2020, 1259539. [Google Scholar] [CrossRef]
- Zubair, M.; Rana, I.A.; Islam, Y.; Khan, S.A. Variable Structure Based Control for the Chemotherapy of Brain Tumor. IEEE Access 2021, 9, 107333–107346. [Google Scholar] [CrossRef]
- Jafari, M.; Mobayen, S. Second-order sliding set design for a class of uncertain nonlinear systems with disturbances: An LMI approach. Math. Comput. Simul. 2019, 156, 110–125. [Google Scholar]
- Ghazali, R.; Sam, Y.M.; Rahmat, M.F.; Hashim, A.W.I.M.; Zulfatman. Performance comparison between sliding mode control with PID sliding surface and PID controller for an electro-hydraulic positioning system. Int. J. Adv. Sci. Eng. Inform. Technol. 2011, 1, 447–452. [Google Scholar]
- Islam, Y.; Ahmad, I.; Zubair, M.; Shahzad, K. Double Integral sliding mode control of Leukemia Therapy. Biomed. Signal Process. Control 2020, 61, 102046. [Google Scholar] [CrossRef]
- Venkataraman, S.T.; Gulati, S. Control of Nonlinear Systems Using Terminal Sliding Modes. In Proceedings of the 1992 American Control Conference, Chicago, IL, USA, 24–26 June 1992; IEEE: Piscataway, NJ, USA, 1992; pp. 891–893. [Google Scholar]
- Utkin, V.I.; Guldner, J.; Shi, J. Sliding Mode Control in Electro-Mechanical Systems, 2nd ed.; CRC Press: Boca Raton, FL, USA, 2009. [Google Scholar]
- Polap, D.; Woźniak, M. Red fox optimization algorithm. Expert Syst. Appl. 2021, 166, 114107. [Google Scholar]
- Zhang, Z.; Wang, X.; Cao, L. FOX Optimization Algorithm Based on Adaptive Spiral Flight and Multi-Strategy Fusion. Biomimetics 2024, 9, 524. [Google Scholar] [CrossRef] [PubMed]
- Bratus, A.; Yegorov, I.; Yurchenko, D. Dynamic mathematical models of therapy processes against glioma and leukemia under stochastic uncertainties. Mecc. Mater. Strutt. 2016, 6, 131–138. [Google Scholar]
- Islam, Y.; Ahmad, I.; Zubair, M.; Islam, A. Adaptive terminal and supertwisting sliding mode controllers for acute Leukemia therapy. Biomed. Signal Process. Control 2022, 71, 103121. [Google Scholar]
- Bratus, A.; Fimmel, E.; Todorov, Y.; Semenov, Y.; Nürnberg, F. On strategies on a mathematical model for leukemia therapy. Nonlinear Anal. Real World Appl. 2012, 13, 1044–1059. [Google Scholar]
- Mughees, A.; Ahmad, I.; Jadoon, A.N. Enhanced Nonlinear Control for Trajectory Tracking Control of a Quad-Copter System Using Redfox Algorithm. IEEE Access 2024, 12, 86618–86630. [Google Scholar]
- Mohammed, H.; Rashid, T. FOX: A FOX-inspired optimization algorithm. Appl. Intell. 2023, 53, 1030–1050. [Google Scholar] [CrossRef]
- Tan, W.Y.; Hanin, L.G. (Eds.) Handbook of Cancer Models with Applications; Series in Mathematical Biology and Medicine; World Scientific: Singapore; Hackensack, NJ, USA, 2008; Volume 9. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Value | Name | Value |
|---|---|---|---|
| 0.1 | |||
| c | |||
| 1 | D | 75 | |
| 0 |
| Controller Method | Name | Values |
|---|---|---|
| Integral Super-Twisting Sliding Mode Control | ||
| Controller Method | Name | Values |
|---|---|---|
| Integral Super-Twisting Sliding Mode Control | ||
| Controller | Steady State Error | Settling Time | Transient Time | Peak Value | Peak Time |
|---|---|---|---|---|---|
| SC | |||||
| SMC | |||||
| ISTSMC |
| Controller | Steady State Error | Settling Time | Transient Time | Peak Value | Peak Time |
|---|---|---|---|---|---|
| SC | |||||
| SMC | |||||
| ISTSMC |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Butt, M.M.; Butt, A.I.K. Optimized Integral Super-Twisting Sliding Mode Control for Acute Leukemia Therapy. Mathematics 2025, 13, 1077. https://doi.org/10.3390/math13071077
Butt MM, Butt AIK. Optimized Integral Super-Twisting Sliding Mode Control for Acute Leukemia Therapy. Mathematics. 2025; 13(7):1077. https://doi.org/10.3390/math13071077
Chicago/Turabian StyleButt, Muhammad Munir, and Azhar Iqbal Kashif Butt. 2025. "Optimized Integral Super-Twisting Sliding Mode Control for Acute Leukemia Therapy" Mathematics 13, no. 7: 1077. https://doi.org/10.3390/math13071077
APA StyleButt, M. M., & Butt, A. I. K. (2025). Optimized Integral Super-Twisting Sliding Mode Control for Acute Leukemia Therapy. Mathematics, 13(7), 1077. https://doi.org/10.3390/math13071077