
Recent Progress in Ocean Intelligent Perception and Image Processing and the Impacts of Nonlinear Noise



Abstract
1. Introduction
2. Ocean Intelligent Perception Devices and Image Acquisition
2.1. Autonomous Underwater Vehicles with Multiple Sensors
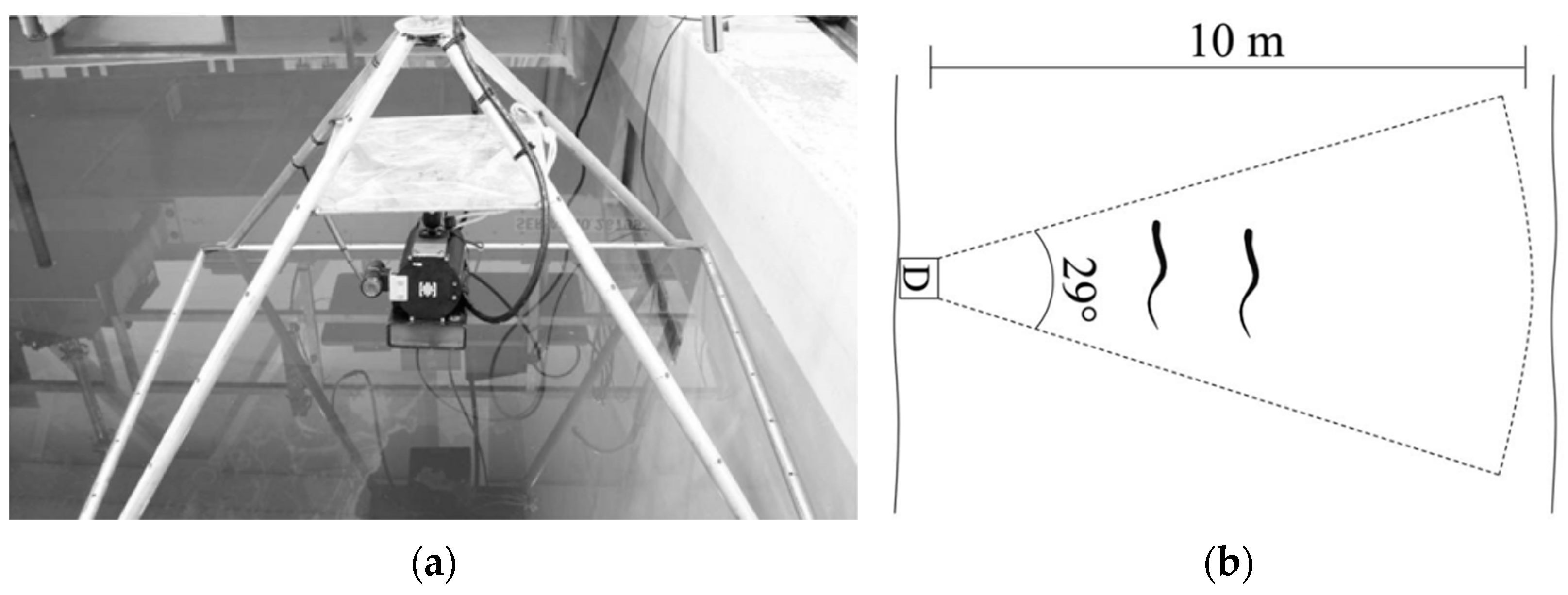
2.2. Sonar Detection Image Acquisition
2.3. Resource Limitations of Ocean Intelligent Perception Devices
3. Ocean Image Recognition and Detection Models
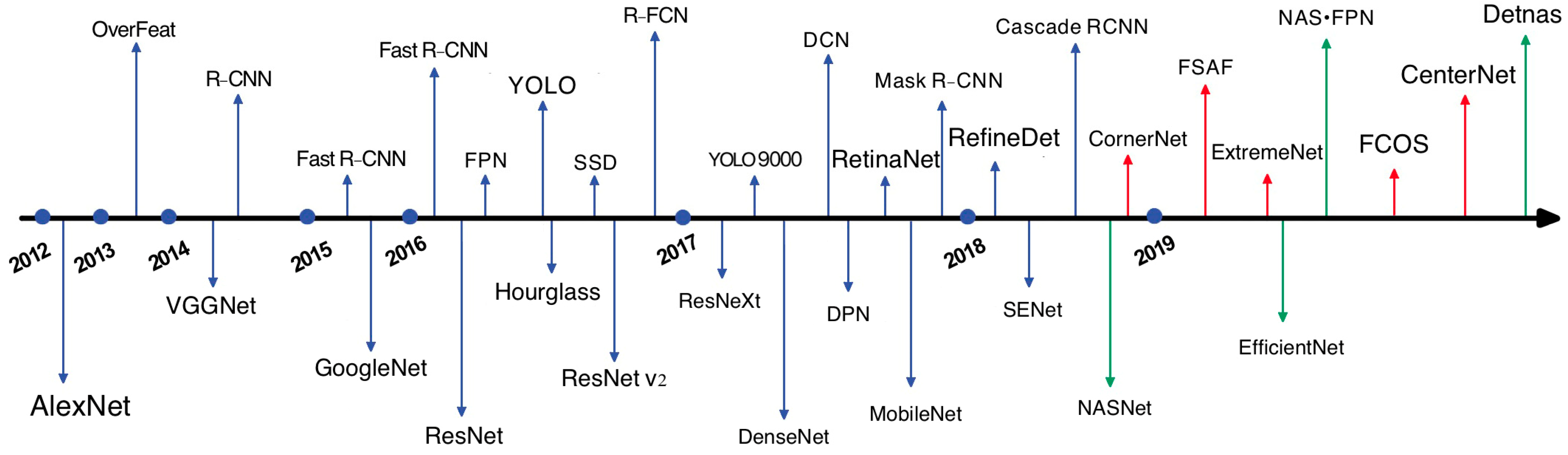
3.1. Deep Convolutional Neural Networks
3.2. Two-Stage Detection Network Model
3.3. Single-Stage Detection Network Model
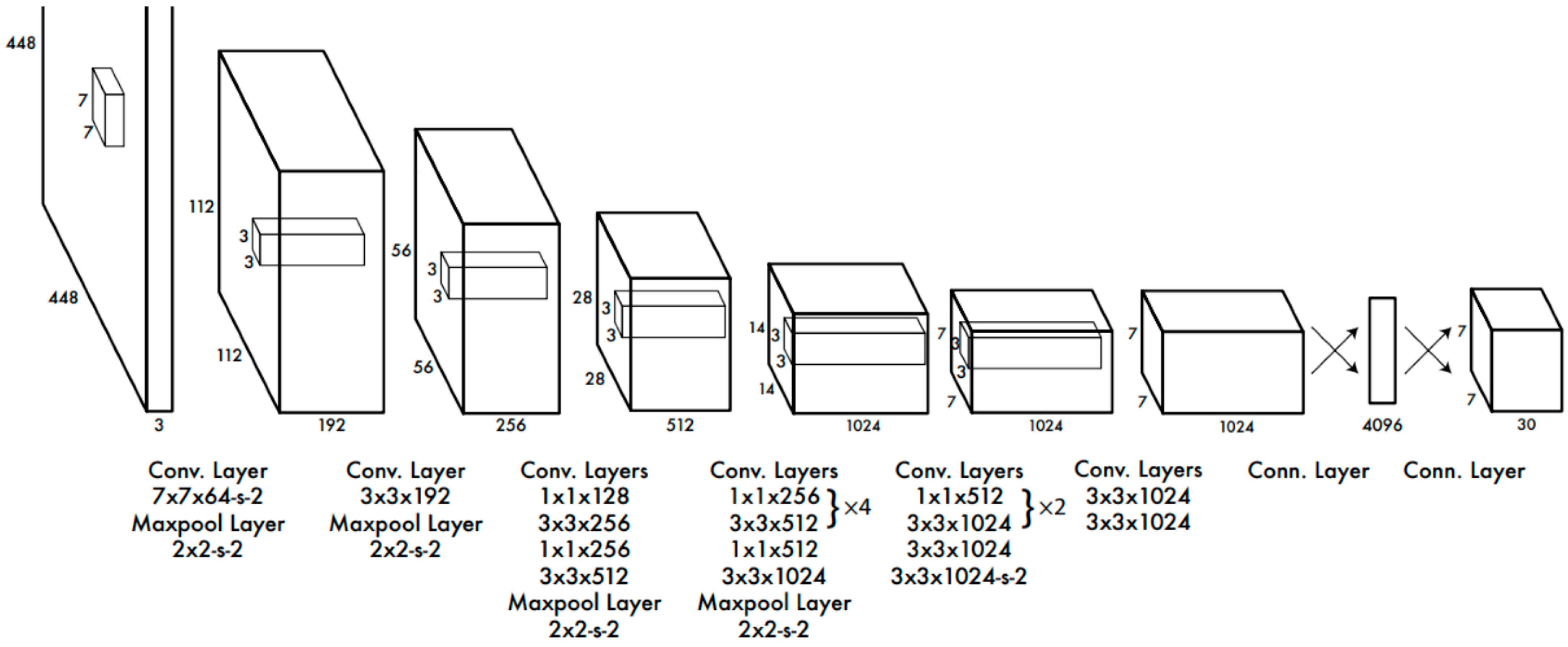
3.4. Mathematical Structures of YOLO Model
- 1.
- Lightweight backbone network
- 2.
- Multi-scale feature fusion and grid prediction
- Multi-scale prediction;
- Grid prediction;
- 3.
- Composite loss function
- Positioning loss;
- Classification loss;
- Confidence loss;
3.5. Development and Comparative Study of YOLO Models
4. Adaptive Image Processing Processes Supporting Ocean Image Recognition and Detection
4.1. Adaptive Image Annotation
4.2. Adaptive Image Feature Enhancement
4.3. Adaptive Image Segmentation
- Instance segmentation
- Semantic segmentation
- Scene applicability of adaptive image segmentation models
5. Impact of Nonlinear Noise on Ocean Signal Detection and Countermeasures
5.1. Impact of Nonlinear Noise on Ocean Signal Detection
5.2. Coping Methods for Nonlinear Noise Impacts on Ocean Image Detection
5.2.1. Traditional Denoising Methods
5.2.2. Dl-Based Denoising Methods
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| DL | Deep learning |
| RUV | Remote underwater video |
| AUV | Autonomous underwater vehicle |
| DnCNN | denoising Convolutional Neural Network |
| DnGAN | denoising Generative Adversarial Network |
| YOLO | You Look Once |
| LiDAR | Light Detection and Ranging |
| Sonar | Sound Navigation and Ranging |
| FLS | Forward-looking sonar |
| SSS | Side-scan sonar |
| SAS | Synthetic aperture sonar |
| DIDSON | Dual Frequency Sonar |
| 1DCTN | End-to-end underwater acoustic target recognition model |
| DCNN | Deep convolutional neural network |
| APRCNN | Audio Perspective Region-based Convolutional Neural Network |
| SVM | Support vector machine |
| R-CNN | Region-based Convolutional Neural Network |
| SSD | Single Shot MultiBox Detector |
| FCN | Fully Convolutional Network |
| MSE | Mean Squared Error |
| BCE | Binary Cross Entropy |
| PAN | Path aggregation networks |
| FPN | Feature pyramid networks |
| GPA | Gated path aggregate |
| SNR | Signal-to-noise ratio |
References
- Lu, F.Q.; Gao, X.Y.; Ma, J.; Xu, J.F.; Xue, Q.S.; Cao, D.S.; Quan, X.Q. Intelligent marine detection based on spectral imaging and neural network modeling. Ocean. Eng. 2024, 310, 118640. [Google Scholar] [CrossRef]
- Yan, Y.J.; Liu, Y.D.; Fang, J.; Lu, Y.F.; Jiang, X.C. Application status and development trends for intelligent perception of distribution network. High Volt. 2021, 6, 938–954. [Google Scholar] [CrossRef]
- Torres, A.; Abril, A.M.; Clua, E.E.G. A Time-Extended (24 h) Baited Remote Underwater Video (BRUV) for monitoring pelagic and nocturnal marine species. J. Mar. Sci. Eng. 2020, 8, 208. [Google Scholar] [CrossRef]
- Wang, Y.Y.; Ma, X.R.; Wang, J.; Hou, S.L.; Dai, J.; Gu, D.B.; Wang, H.Y. Robust AUV visual loop-closure detection based on Variational Autoencoder Network. IEEE Trans. Ind. Inform. 2022, 18, 8829–8838. [Google Scholar]
- Lee, S.M.; Roh, M.I.; Jisang, H.; Lee, W. A method of estimating the locations of other ships from ocean images. Korean J. Comput. Des. Eng. 2020, 25, 320–328. [Google Scholar] [CrossRef]
- Cheng, S.J.; Shi, X.C.; Mao, W.J.; Alkhalifah, T.A.; Yang, T.; Liu, Y.Z.; Sun, H.P. Elastic seismic imaging enhancement of sparse 4C ocean-bottom node data using deep learning. IEEE Trans. Geosci. Remote Sens. 2023, 61, 5910214. [Google Scholar] [CrossRef]
- Wang, C.; Stopa, J.E.; Vandemark, D.; Foster, R.; Ayet, A.; Mouche, A.; Chapron, B.; Sadowski, P. A multi-tagged SAR ocean image dataset identifying atmospheric boundary layer structure in winter tradewind conditions. Geosci. Data J. 2025, 12, e282. [Google Scholar] [CrossRef]
- Dong, K.Y.; Liu, T.; Shi, Z.; Zhang, Y. Accurate and real-time visual detection algorithm for environmental perception of USVS under all-weather conditions. J. Real-Time Image Process. 2024, 21, 36. [Google Scholar] [CrossRef]
- Zha, Z.J.; Ping, X.B.; Wang, S.L.; Wang, D.L. Deblurring of beamformed images in the ocean acoustic waveguide using deep learning-based deconvolution. Remote Sens. 2024, 16, 2411. [Google Scholar] [CrossRef]
- Sattar, J.; Giguère, P.; Dudek, G. Sensor-based behavior control for an autonomous underwater vehicle. Int. J. Robot. Res. 2009, 28, 701–713. [Google Scholar]
- Di Ciaccio, F. The supporting role of artificial intelligence and machine/deep learning in monitoring the marine environment: A bibliometric analysis. Ecol. Quest. 2024, 35, 1–30. [Google Scholar]
- Xu, X.P.; Lin, X.X.; An, X.R. Introduction to image pro-processing subsystem of geostationary ocean color imager (GOCI). Korean J. Remote Sens. 2010, 26, 167–173. [Google Scholar]
- Chen, S.D.; Liu, Y. Migration learning based on computer vision and its application in ocean image processing. J. Coast. Res. 2020, S104, 281–285. [Google Scholar] [CrossRef]
- Xue, L.Z.; Zeng, X.Y.; Jin, A.Q. A novel deep-learning method with channel attention mechanism for underwater target recognition. Sensors 2022, 22, 5492. [Google Scholar] [CrossRef] [PubMed]
- Gong, W.J.; Tian, J.; Liu, J.Y. Underwater object classification method based on depthwise separable convolution feature fusion in sonar images. Appl. Sci. 2022, 12, 3268. [Google Scholar] [CrossRef]
- Huang, Y.; Li, W.; Yuan, F. Speckle noise reduction in sonar imagebased on adaptive redundant dictionary. J. Mar. Sci. Eng. 2020, 8, 761. [Google Scholar]
- Belcher, E.; Matsuyama, B.; Trimble, G. Object identification with acoustic lenses. In Proceedings of the Annual Conference of the Marine-Technology-Society, Honolulu, HI, USA, 5–8 November 2001. [Google Scholar]
- Shin, Y.S.; Cho, Y.G.; Choi, H.T.; Kim, A. Comparative study of sonar image processing for underwater navigation. J. Ocean. Eng. Technol. 2016, 30, 214–220. [Google Scholar]
- Chen, Y.H.; Liu, X.Y.; Jiang, J.Y.; Gao, S.Y.; Liu, Y.; Jiang, Y.Q. Reconstruction of degraded image transmitting through ocean turbulence via deep learning. J. Opt. Soc. Am. A Opt. Image Sci. Vis. 2023, 40, 2215–2222. [Google Scholar] [CrossRef]
- Yang, C.; Zhang, C.; Jiang, L.Y.; Zhang, X.W. Underwater image object detection based on multi-scale feature fusion. Mach. Vis. Appl. 2024, 35, 124. [Google Scholar] [CrossRef]
- Wang, Z.; Guo, J.X.; Zeng, L.Y.; Zhang, C.L.; Wang, B.H. MLFFNet: Multilevel feature fusion network for object detection in sonar images. IEEE Trans. Geosci. Remote Sens. 2022, 60, 5119119. [Google Scholar]
- Li, G.Y.; Liao, X.F.; Chao, B.H.; Jin, Y. Multi-scale feature fusion algorithm for underwater remote object detection in forward-looking sonar images. J. Electron. Imaging 2024, 33, 063031. [Google Scholar]
- Xu, T.; Zhou, J.Y.; Guo, W.T.; Cai, L.; Ma, Y.K. Fine reconstruction of underwater images for environmental feature fusion. Int. J. Adv. Robot. Syst. 2021, 18, 17298814211039687. [Google Scholar] [CrossRef]
- Gong, T.Y.; Zhang, M.M.; Zhou, Y.; Bai, H.H. Underwater image enhancement based on color feature fusion. Electronics 2023, 12, 4999. [Google Scholar] [CrossRef]
- Chen, D.; Kang, F.; Li, J.J.; Zhu, S.S.; Liang, X.W. Enhancement of underwater dam crack images using multi-feature fusion. Autom. Constr. 2024, 167, 105727. [Google Scholar]
- Zhu, Y.T.; Chao, X.P.; Wang, X.Q.; Chen, J.; Huang, H.F. An unsupervised ocean surface waves suppression algorithm based on sub-aperture SAR images. Int. J. Remote Sens. 2023, 44, 1460–1483. [Google Scholar]
- Chao, X.P.; Wang, Q.S.; Wang, X.Q.; Chen, J.; Zhu, Y.T. Ocean-wave suppression for synthetic aperture radar images by depth counteraction method. Remote Sens. Environ. 2024, 305, 114086. [Google Scholar]
- Jiang, Z.Y.; Gao, X.; Shi, L.; Li, N.; Zou, L. Detection of ocean internal waves based on modified deep convolutional generative adversarial network and WaveNet in moderate resolution imaging spectroradiometer images. Appl. Sci. 2023, 13, 11235. [Google Scholar] [CrossRef]
- Liu, F.; Song, Q.Z.; Jin, G.H. Expansion of restricted sample for underwater acoustic signal based on Generative Adversarial Networks. In Proceedings of the 10th International Conference on Graphics and Image Processing, Chengdu, China, 12–14 December 2018. [Google Scholar]
- Er, M.J.; Chen, M.J.; Zhang, Y.; Gao, W.X. Research challenges, recent advances, and popular datasets in deep learning-based underwater marine object detection: A review. Sensors 2023, 23, 1990. [Google Scholar] [CrossRef]
- Li, X.B.; Yan, L.; Qi, P.F.; Zhang, L.P.; Goudail, F.; Liu, T.G.; Zhai, J.S.; Hu, H.F. Polarimetric imaging via deep learning: A review. Remote Sens. 2023, 15, 1540. [Google Scholar] [CrossRef]
- Li, J.; Xu, W.K.; Deng, L.M.; Xiao, Y.; Han, Z.Z.; Zheng, H.Y. Deep learning for visual recognition and detection of aquatic animals: A review. Rev. Aquac. 2023, 15, 409–433. [Google Scholar]
- Saleh, A.; Sheaves, M.; Azghadi, M.R. Computer vision and deep learning for fish classification in underwater habitats: A survey. Fish Fish. 2022, 23, 977–999. [Google Scholar] [CrossRef]
- Neupane, D.; Seok, J. A review on deep learning-based approaches for automatic sonar target recognition. Electronics 2020, 9, 1972. [Google Scholar] [CrossRef]
- Whitaker, S.; Barnard, A.; Anderson, G.D.; Havens, T.C. Through-ice acoustic source tracking using vision transformers with ordinal classification. Sensors 2022, 22, 4703. [Google Scholar] [CrossRef]
- Lei, Z.F.; Lei, X.F.; Na, W.; Zhang, Q.Y. Present status and challenges of underwater acoustic target recognition technology: A review. Front. Phys. 2022, 10, 1044890. [Google Scholar]
- Kim, H.G.; Seo, J.-M.; Kim, S.M. Comparison of GAN deep learning methods for underwater optical image enhancement. J. Ocean. Eng. Technol. 2022, 36, 32–40. [Google Scholar] [CrossRef]
- Chai, Y.Q.; Yu, H.H.; Xu, L.; Li, D.L.; Chen, Y.Y. Deep learning algorithms for sonar imagery analysis and its application in aquaculture: A review. IEEE Sens. J. 2023, 23, 28549–28563. [Google Scholar] [CrossRef]
- Wang, C.Y.; Liao, H.Y.M. YOLOv1 to YOLOv10: The fastest and most accurate real-time object detection systems. Apsipa Trans. Signal Inf. Process. 2024, 13, e29. [Google Scholar] [CrossRef]
- Hussain, M. YOLOv1 to v8: Unveiling Each Variant-A Comprehensive Review of YOLO. IEEE Access 2024, 12, 42816–42833. [Google Scholar] [CrossRef]
- Jiao, L.; Abdullah, M.I. YOLO series algorithms in object detection of unmanned aerial vehicles: A survey. Serv. Oriented Comput. Appl. 2024, 18, 269–298. [Google Scholar] [CrossRef]
- Liu, S.; Xu, H.L.; Lin, Y.; Gao, L. Visual navigation for recovering an AUV by another AUV in shallow water. Sensors 2019, 19, 1889. [Google Scholar] [CrossRef]
- Wang, X.M.; Zerr, B.; Thomas, H.; Clement, B.; Xie, Z.X. Pattern formation of multi-AUV systems with the optical sensor based on displacement-based formation control. Int. J. Syst. Sci. 2020, 51, 348–367. [Google Scholar]
- Auster, P.J.; Lindholm, J.; Plourde, M.; Barber, K.; Singh, H. Camera configuration and use of AUVs to census mobile fauna. Mar. Technol. Soc. J. 2007, 41, 49–52. [Google Scholar]
- Rao, J.J.; Xu, K.; Chen, J.B.; Lei, J.T.; Zhang, Z.; Zhang, Q.Y.; Giernacki, W.; Liu, M. Sea-surface target visual tracking with a multi-camera cooperation approach. Sensors 2022, 22, 693. [Google Scholar] [CrossRef]
- Yang, D.F.; Solihin, M.I.; Zhao, Y.W.; Yao, B.C.; Chen, C.R.; Cai, B.Y.; Machmudah, A. A review of intelligent ship marine object detection based on RGB camera. IET Image Process. 2024, 18, 281–297. [Google Scholar]
- Sahoo, A.; Dwivedy, S.K.; Robi, P. Advancements in the field of autonomous underwater vehicle. Ocean. Eng. 2019, 181, 145–160. [Google Scholar]
- Alaie, H.K.; Farsi, H. Passive sonar target detection using statistical classifier and adaptive threshold. Appl. Sci. 2018, 8, 61. [Google Scholar] [CrossRef]
- Abu, A.; Diamant, R. Enhanced fuzzy-based local informationalgorithm for sonar image segmentation. IEEE Trans. Image Process. 2020, 29, 445–460. [Google Scholar]
- Kim, S.H. A study on the position control system of the small ROV using sonar sensors. J. Soc. Nav. Archit. Korea 2008, 45, 579–589. [Google Scholar]
- Jiang, J.J.; Wang, X.Q.; Duan, F.J.; Fu, X.; Huang, T.T.; Li, C.Y.; Ma, L.; Bu, L.R.; Sun, Z.B. A sonar-embedded disguised communication strategy by combining sonar waveforms and whale call pulses for underwater sensor platforms. Appl. Acoust. 2019, 145, 255–266. [Google Scholar]
- Yuan, X.; Li, N.; Gong, X.B.; Yu, C.L.; Zhou, X.T.; Ortega, J.F.M. Underwater wireless sensor network-based delaunay triangulation (UWSN-DT) algorithm for sonar map fusion. Comput. J. 2023, 67, 1699–1709. [Google Scholar]
- Xi, M.; Wang, Z.J.; He, J.Y.; Wang, Y.B.; Wen, J.B.; Xiao, S.; Yang, J.C. High-Precision underwater perception and path planning of AUVs based on Quantum-Enhanced. IEEE Trans. Consum. Electron. 2024, 70, 5607–5617. [Google Scholar]
- Chen, G.J.; Cheng, D.G.; Chen, W.; Yang, X.; Guo, T.Z. Path planning for AUVs based on improved APF-AC algorithm. CMC Comput. Mater. Contin. 2024, 78, 3721–3741. [Google Scholar]
- Jangir, P.K.; Ewans, K.C.; Young, I.R. On the functionality of radar and laser ocean wave sensors. J. Mar. Sci. Eng. 2022, 10, 1260. [Google Scholar] [CrossRef]
- Kincade, K. Sensors and lasers map ebb and flow of ocean life. Laser Focus World 2003, 39, 91–96. [Google Scholar]
- Laux, A.; Mullen, L.; Perez, P.; Zege, E. Underwater laser range finder. In Ocean Sensing and Monitoring IV, Proceedings of the SPIE Defense, Security, and Sensing, Baltimore, MD, USA, 23–27 April 2012; SPIE: Bellingham, WA, USA, 2012; Volume 8732, p. 83721B. [Google Scholar]
- Fournier, G.R.; Bonnier, D.; Forand, J.L.; Pace, P.W. Range-gated underwater laser imaging-system. Opt. Eng. 1993, 32, 2185–2190. [Google Scholar]
- Klepsvik, J.O.; Bjarnar, M.L. Laser-radar technology for underwater inspection, mapping. Sea Technol. 1996, 37, 49–53. [Google Scholar]
- Long, H.; Shen, L.Q.; Wang, Z.Y.; Chen, J.B. Underwater forward-looking sonar images target detection via speckle reduction and scene prior. IEEE Trans. Geosci. Remote Sens. 2023, 61, 5604413. [Google Scholar]
- Franchi, M.; Ridolfi, A.; Allotta, B. Underwater navigation with 2D forward looking SONAR: An adaptive unscented Kalman filter-based strategy for AUVs. J. Field Robot. 2021, 38, 355–385. [Google Scholar]
- Greene, A.; Rahman, A.F.; Kline, R.; Rahman, M.S. Side scan sonar: A cost-efffcient alternative method for measuring seagrass cover in shallow environments. Estuar. Coast. Shelf Sci. 2018, 207, 250–258. [Google Scholar]
- Belcher, E.; Hanot, W.; Burch, J. Dual-frequency identification sonar (DIDSON). In Proceedings of the 2002 Interntional Symposium on Underwater Technology, Tokyo, Japan, 16–19 April 2002. [Google Scholar]
- Joe, H.; Cho, H.; Sung, M.; Kim, J.; Yu, S.-c. Sensor fusion of two sonar devices for underwater 3D mapping with an AUV. Auton. Robot. 2021, 45, 543–560. [Google Scholar]
- Christensen, J.H.; Mogensen, L.V.; Ravn, O. Side-Scan Sonar imaging: Real-time acoustic streaming. In Proceedings of the 13st IFAC Conference on Control Applications in Marine Systems, Robotics, and Vehicles, Oldenburg, Germany, 22–24 September 2021. [Google Scholar]
- Zacchini, L.; Franchi, M.; Ridolfi, A. Sensor-driven autonomous underwater inspections: A receding-horizon RRT-based view planning solution for AUVs. J. Field Robot. 2022, 39, 499–527. [Google Scholar]
- Li, X.H.; Li, Y.A.; Yu, J.; Chen, X.; Dai, M. PMHT approach for multi-target multi-sensor sonar tracking in clutter. Sensors 2015, 15, 28177–28192. [Google Scholar] [CrossRef]
- Moursund, R.A.; Carlson, T.J.; Peters, R.D. A fisheries application of a dual-frequency identification sonar acoustic camera. In Proceedings of the ICES Symposium on Acoustics in Fisheries and Aquatic Ecology, Montpellier, France, 10–14 June 2002. [Google Scholar]
- Able, K.W.; Grothues, T.M.; Rackovan, J.L.; Buderman, F.E. Application of Mobile Dual-frequency Identification Sonar (DIDSON) to Fish in Estuarine Habitats. Northeast. Nat. 2014, 21, 192–209. [Google Scholar]
- Handegard, N.O.; Williams, K. Automated tracking of fish in trawls using the DIDSON (Dual frequency IDentification SONar). ICES J. Mar. Sci. 2008, 65, 636–644. [Google Scholar]
- Nichols, O.C.; Eldredge, E.; Cadrin, S.X. Gray seal behavior in a fish weir observed using Dual-Frequency identification sonar. Mar. Technol. Soc. J. 2014, 48, 72–78. [Google Scholar]
- McCann, E.L.; Johnson, N.S.; Hrodey, P.J.; Pangle, K.L. Characterization of sea lamprey stream entry using Dual-Frequency identification sonar. Trans. Am. Fish. Soc. 2018, 147, 514–524. [Google Scholar]
- Zhao, W.; Li, X.; Pang, Z.Q.; Hao, C.P. A novel distributed bearing-only target tracking algorithm for underwater sensor networks with resource constraints. IET Radar Sonar Navig. 2024, 18, 1161–1177. [Google Scholar]
- Tang, M.Q.; Ren, C.J.; Xin, Y.L. Efficient resource allocation algorithm for underwater wireless sensor networks based on improved stochastic gradient descent method. AD HOC Sens. Wirel. Netw. 2021, 49, 207–222. [Google Scholar]
- Wu, H.J.; Wang, X.L.; Liao, H.B.; Jiao, X.B.; Liu, Y.Y.; Shu, X.J.; Wang, J.L.; Rao, Y.J. Signal processing in smart fiber-optic distributed acoustic sensor. Acta Opt. Sin. 2024, 44, 0106009. [Google Scholar]
- Zhao, D.D.; Mao, W.B.; Chen, P.; Dang, Y.J.; Liang, R.H. FPGA-based real-time synchronous parallel system for underwater acoustic positioning and navigation. IEEE Trans. Ind. Electron. 2024, 71, 3199–3207. [Google Scholar]
- Li, C.Y.; Guo, S.X. Characteristic evaluation via multi-sensor information fusion strategy for spherical underwater robots. Inf. Fusion 2023, 95, 199–214. [Google Scholar]
- Periola, A.A.; Alonge, A.A.; Ogudo, K.A. Edge computing for big data processing in underwater applications. Wirel. Netw. 2022, 28, 2255–2271. [Google Scholar]
- Fuentes, A.J.; Suchy, M.; Palomo, P.B. The greatest challenge for URN reduction in the oceans by means of engineering. In Proceedings of the MTS/IEEE Oceans Seattle Conference, Seattle, WA, USA, 27–31 October 2019. [Google Scholar]
- Zheng, L.Y.; Liu, M.Q.; Zhang, S.L.; Liu, Z.A.; Dong, S.L. End-to-end multi-sensor fusion method based on deep reinforcement learning in UASNs. Ocean. Eng. 2024, 305, 117904. [Google Scholar]
- Bhattacharjee, S.; Shanmugam, P.; Das, S. A deep-learning-based lightweight model for ship localizations in SAR Images. IEEE Access 2023, 11, 94415–94427. [Google Scholar]
- Huang, J.F.; Zhang, T.J.; Zhao, S.J.; Zhang, L.; Zhou, Y.C. An underwater organism image dataset and a lightweight module designed for object detection networks. ACM Trans. Multimed. Comput. Commun. Appl. 2024, 20, 147. [Google Scholar]
- Lu, Y.; Yang, M.; Liu, R.W. DSPNet: Deep learning-enabled blind reduction of speckle noise. In Proceedings of the 25th International Conference on Pattern Recognition, Electronic Network, Milan, Italy, 10–15 January 2021. [Google Scholar]
- Wang, H.; Gao, N.; Xiao, Y.; Tang, Y. Image feature extraction based on improved FCN for UUV side-scan sonar. Mar. Geophys. Res. 2020, 41, 18. [Google Scholar]
- Cheng, Z.; Huo, G.; Li, H. A multi-domain collaborative transfer learning method with multi-scale repeated attention mechanism for underwater side-scan sonar image classification. Remote Sens. 2022, 14, 355. [Google Scholar] [CrossRef]
- Ribeiro, P.O.C.S.; dos Santos, M.M.; Drews, P.L.J.; Botelho, S.S.C.; Longaray, L.M.; Giacomo, G.G.; Pias, M.R. Underwater place recognition in unknown environments with triplet based acoustic image retrieval. In Proceedings of the 17th IEEE International Conference on Machine Learning and Applications, Orlando, FL, USA, 17–20 December 2018. [Google Scholar]
- Wang, Z.; Guo, J.; Huang, W.; Zhang, S. Side-scan sonar image segmentation based on multi-channel fusion convolution neural networks. IEEE Sens. J. 2022, 22, 5911–5928. [Google Scholar]
- Yu, S.B. Sonar image target detection based on deep learning. Math. Probl. Eng. 2022, 2022, 5294151. [Google Scholar]
- Dai, Z.Z.; Liang, H.; Duan, T. Small-sample sonar image classification based on deep learning. J. Mar. Sci. Eng. 2022, 10, 1820. [Google Scholar] [CrossRef]
- Ge, H.L.; Dai, Y.W.; Zhu, Z.Y.; Liu, R.B. A deep learning model applied to optical image target detection and recognition for the identification of underwater biostructures. Machines 2022, 10, 809. [Google Scholar] [CrossRef]
- Zhang, Y.; Wang, X.W.; Sun, L.; Lei, P.S.; Chen, J.N.; He, J.; Zhou, Y.; Liu, Y.L. Mask-guided deep learning fishing net detection and recognition based on underwater range gated laser imaging. Opt. Laser Technol. 2024, 171, 110402. [Google Scholar] [CrossRef]
- Yang, K.; Wang, B.; Fang, Z.D.; Cai, B.G. An end-to-end underwater acoustic target recognition model based on One-Dimensional Convolution and transformer. J. Mar. Sci. Eng. 2024, 12, 1793. [Google Scholar] [CrossRef]
- Dong, K.Y.; Liu, T.; Shi, Z.; Zhang, Y. Visual detection algorithm for enhanced environmental perception of unmanned surface vehicles in complex marine environments. J. Intell. Robot. Syst. 2024, 110, 1. [Google Scholar] [CrossRef]
- Li, L.L.; Zhang, S.J.; Wang, B. Plant disease detection and classification by deep learning—A review. IEEE Access 2021, 9, 56683–56698. [Google Scholar] [CrossRef]
- Li, Y.; Tang, Y. Design on intelligent feature graphics based on convolution operation. Mathematics 2022, 10, 384. [Google Scholar] [CrossRef]
- Singh, O.D.; Malik, A.; Yadav, V.; Gupta, S.; Dora, S. Deep segmenter system for recognition of micro cracks in solar cell. Multimed. Tools Appl. 2021, 80, 6509–6533. [Google Scholar] [CrossRef]
- Liu, H.Y.; Li, Y. Interaction of Asymmetric Adaptive Network Structures and Parameter Balance in Image Feature Extraction and Recognition. Symmetry 2024, 16, 1651. [Google Scholar] [CrossRef]
- Ma, Y.X.; Zhang, X.B.; Jiang, F.K.; Wei, Z.R.; Liu, C.G. Near-field geoacoustic inversion using bottom reflection signals via self-attention mechanism. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2024, 17, 10545–10558. [Google Scholar] [CrossRef]
- Liu, Y.F.; Zhao, Y.J.; Gerstoft, P.; Zhou, F.; Qiao, G.; Yin, J.W. Deep transfer learning-based variable Doppler underwater acoustic communications. J. Acoust. Soc. Am. 2023, 154, 232–244. [Google Scholar] [CrossRef]
- Scaradozzi, D.; de Marco, R.; Li Veli, D.; Lucchetti, A.; Screpanti, L.; Di Nardo, F. Convolutional Neural Networks for enhancing detection of Dolphin whistles in a dense acoustic environment. IEEE Access 2024, 12, 127141–127148. [Google Scholar]
- Li, X.W.; Huang, W.M.; Peters, D.K.; Power, D. Assessment of synthetic aperture radar image preprocessing methods for iceberg and ship recognition with Convolutional Neural Networks. In Proceedings of the IEEE Radar Conference, Boston, MA, USA, 22–26 April 2019. [Google Scholar]
- Ashok, P.; Latha, B. Feature extraction of underwater acoustic signal target using machine learning technique. Trait. Du Signal 2024, 41, 1303–1314. [Google Scholar]
- Wang, H.Y.; Li, X.F. DeepBlue: Advanced convolutional neural network applications for ocean remote sensing. IEEE Geosci. Remote Sens. Mag. 2024, 12, 138–161. [Google Scholar] [CrossRef]
- Uijlings, J.R.; van de Sande, K.E.; Gevers, T.; Smeulders, A.W. Selective search for object recognition. Int. J. Comput. Vis. 2013, 104, 154–171. [Google Scholar]
- Yuan, Z.W.; Zhang, J. Feature extraction and image retrieval based on AlexNet. In Proceedings of the 8th International Conference on Digital Image Processing, Chengdu, China, 20–23 May 2016. [Google Scholar]
- Liu, X.; Zhu, H.H.; Song, W.H.; Wang, J.H.; Yan, L.L.; Wang, K.L. Research on improved VGG-16 model based on transfer learning for acoustic image recognition of underwater search and rescue targets. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2024, 17, 18112–18128. [Google Scholar] [CrossRef]
- Huang, X.; Li, N.; Pu, Y.Q.; Zhang, T.; Wang, B. Neuroprotective effects of ginseng phytochemicals: Recent perspectives. Molecules 2019, 24, 2939. [Google Scholar] [CrossRef]
- Song, P.H.; Li, P.T.; Dai, L.H.; Wang, T.; Chen, Z. Boosting R-CNN: Reweighting R-CNN samples by RPN?s error for underwater object detection. Neurocomputing 2023, 530, 150–164. [Google Scholar] [CrossRef]
- Bao, S.D.; Meng, J.M.; Sun, L.N.; Liu, Y.X. Detection of ocean internal waves based on Faster R-CNN in SAR images. J. Oceanol. Limnol. 2020, 38, 55–63. [Google Scholar]
- Zeng, L.C.; Sun, B.; Zhu, D.Q. Underwater target detection based on Faster R-CNN and adversarial occlusion network. Eng. Appl. Artif. Intell. 2021, 100, 104190. [Google Scholar]
- Byeon, Y.; Kim, E.; Lim, H.J.; Kim, H.S. Development of a Faster R-CNN-based marine debris detection model for an embedded system. J. Inst. Control. Robot. Syst. 2021, 27, 1038–1043. [Google Scholar]
- Faisal, M.; Chaudhury, S.; Sankaran, K.S.; Raghavendra, S.; Chitra, R.J.; Eswaran, M.; Boddu, R. Faster R-CNN algorithm for detection of plastic garbage in the ocean: A case for turtle preservation. Math. Probl. Eng. 2022, 2022, 3639222. [Google Scholar] [CrossRef]
- Bi, W.H.; Jin, Y.; Li, J.X.; Sun, L.L.; Fu, G.W.; Jin, W. In-Situ detection method of Jellyfish based on improved Faster R-CNN and FP16. IEEE Access 2023, 11, 81803–81814. [Google Scholar]
- He, K.M.; Gkioxari, G.; Dollár, P.; Girshick, R. Mask R-CNN. In Proceedings of the IEEE International Conference on Computer Vision, Venice, Italy, 22–29 October 2017. [Google Scholar]
- He, K.M.; Gkioxari, G.; Dollár, P.; Girshick, R. Mask R-CNN. IEEE Trans. Pattern Anal. Mach. Intell. 2020, 42, 386–397. [Google Scholar] [CrossRef]
- Zheng, Y.G.; Qi, K.T.; Zhang, H.S. Stripe segmentation of oceanic internal waves in synthetic aperture radar images based on Mask R-CNN. Geocarto Int. 2022, 37, 14480–14494. [Google Scholar] [CrossRef]
- Qian, Y.; Liu, Q.; Zhu, H.M.; Fan, H.F.; Du, B.W.; Liu, S.C. Mask R-CNN for object detection in multitemporal SAR images. In Proceedings of the 10th International Workshop on the Analysis of Multitemporal Remote Sensing Images, Shanghai, China, 5–7 August 2019. [Google Scholar]
- Jain, R.; Zaware, S.; Kacholia, N.; Bhalala, H.; Jagtap, O. Advancing underwater trash detection: Harnessing Mask R-CNN, YOLOv8, EfficientDet-D0 and YOLACT. In Proceedings of the 2nd International Conference on Sustainable Computing and Smart Systems, Coimbatore, India, 10–12 July 2024. [Google Scholar]
- Conrady, C.R.; Er, S.; Attwood, C.G.; Roberson, L.A.; de Vos, L. Automated detection and classification of southern African Roman seabream using mask R-CNN. Ecol. Inform. 2022, 69, 101593. [Google Scholar] [CrossRef]
- Lu, C.H.; Kong, Y.; Guan, Z.Y. A mask R-CNN model for reidentifying extratropical cyclones based on quasi-supervised thought. Sci. Rep. 2020, 10, 15011. [Google Scholar] [CrossRef] [PubMed]
- Liu, C.; Wang, Z.; Wang, S.; Tang, T.; Tao, Y.; Yang, C.; Li, H.; Liu, X.; Fan, X. A new dataset, poisson GAN and AquaNet for underwater object grabbing. IEEE Trans. Circuits Syst. Video Technol. 2021, 32, 2831–2844. [Google Scholar] [CrossRef]
- Mana, S.C.; Sasipraba, T. An intelligent deep learning enabled marine fish species detection and classification model. Int. J. Artif. Intell. Tools 2022, 31, 2250017. [Google Scholar] [CrossRef]
- Bi, X.L.; Xiao, B.; Li, W.S.; Gao, X.B. IEMask R-CNN: Information-Enhanced Mask R-CNN. IEEE Trans. Big Data 2023, 9, 688–700. [Google Scholar] [CrossRef]
- Lee, H.; Eum, S.; Kwon, H. ME R-CNN: Multi-Expert R-CNN for object detection. IEEE Trans. Image Process. 2020, 29, 1030–1044. [Google Scholar] [CrossRef]
- Liu, Y.K.; Huang, Y.W.; Yin, Y.L. SE-Mask R-CNN: An improved Mask R-CNN for apple detection and segmentation. J. Intell. Fuzzy Syst. 2021, 41, 6715–6725. [Google Scholar] [CrossRef]
- Xu, F.J.; Huang, J.X.; Wu, J.; Jiang, L.Y. Active Mask-Box Scoring R-CNN for sonar image instance segmentation. Electronics 2022, 11, 2048. [Google Scholar] [CrossRef]
- Yi, D.W.; Ahmedov, H.B.; Jiang, S.Y.; Li, Y.R.; Flinn, S.J.; Fernandes, P.G. Coordinate-Aware Mask R-CNN with Group Normalization: A underwater marine animal instance segmentation framework. Neurocomputing 2024, 583, 127488. [Google Scholar]
- Liu, W.; Anguelov, D.; Erhan, D.; Szegedy, C.; Reed, S.; Fu, C.Y.; Berg, A.C. Ssd: Single shot multibox detector. In Proceedings of the 14th European Conference on Computer Vision, Amsterdam, The Netherlands, 8–16 October 2016. [Google Scholar]
- Yan, C.Q.; Zhang, H.; Li, X.L.; Yuan, D. R-SSD: Refined single shot multibox detector for pedestrian detection. Appl. Intell. 2022, 52, 10430–10447. [Google Scholar]
- Wang, Z.H.; Yang, S.; Shi, M.J.; Qin, K.Y. FDA-SSD: Fast Depth-Assisted Single-Shot MultiBox Detector for 3D tracking based on monocular vision. Appl. Sci. 2022, 12, 1164. [Google Scholar] [CrossRef]
- Wang, L.Y.; Wang, X.W.; Li, B. Data-driven model SSD-BSP for multi-target coal-gangue detection. Measurement 2023, 219, 113244. [Google Scholar]
- Redmon, J.; Divvala, S.; Girshick, R.; Farhadi, A. You Only Look Once: Unified, Real-Time Object Detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27 June–2 July 2016. [Google Scholar]
- Chen, X.Q.; Wang, M.L.; Ling, J.; Wu, H.F.; Wu, B.; Li, C.F. Ship imaging trajectory extraction via an aggregated you only look once (YOLO) model. Eng. Appl. Artif. Intell. 2024, 130, 107742. [Google Scholar] [CrossRef]
- Shi, Y.G.; Li, S.K.; Liu, Z.Y.; Zhou, Z.G.; Zhou, X.H. MTP-YOLO: You only look once based maritime tiny person detector for emergency rescue. J. Mar. Sci. Eng. 2024, 12, 669. [Google Scholar] [CrossRef]
- Altarez, R.D. Faster R-CNN, RetinaNet and Single Shot Detector in different ResNet backbones for marine vessel detection using cross polarization C-band SAR imagery. Remote Sens. Appl. -Soc. Environ. 2024, 36, 101297. [Google Scholar]
- Lin, T.Y.; Dollár, P.; Girshick, R.; He, K.; Hariharan, B.; Belongie, S. Feature pyramid networks for object detection. In Proceedings of the 30th IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017. [Google Scholar]
- Zhou, L.M.; Rao, X.H.; Li, Y.H.; Zuo, X.Y.; Qiao, B.J.; Lin, Y.H. A Lightweight object detection method in aerial images based on dense feature fusion path aggregation network. ISPRS Int. J. Geo Inf. 2022, 11, 189. [Google Scholar]
- Han, M. E-Bayesian estimation and its E-MSE under the scaled squared error loss function, for exponential distribution as example. Commun. Statics-Simul. Comput. 2019, 48, 1880–1890. [Google Scholar]
- Ting, A.; Santos, J.; Guiltinan, E.; Guiltinan, E. Using machine learning to predict multiphase flow through complex fractures. Energies 2022, 15, 8871. [Google Scholar] [CrossRef]
- Wang, C.Y.; Yeh, I.H.; Liao, H.Y.M. YOLOv9: Learning what you want to learn using programmable gradient information. In Proceedings of the 18th European Conference on Computer Vision, Milan, Italy, 29 September–4 October 2024. [Google Scholar]
- Wang, A.; Chen, H.; Liu, L.; Chen, K.; Lin, Z.; Han, J.; Ding, G. YOLOv10: Real-time end-to-end object detection. arXiv 2024, arXiv:2405.14458. [Google Scholar]
- Redmon, J.; Farhadi, A. Yolo9000: Better, faster, stronger. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017. [Google Scholar]
- Shafiee, M.J.; Chywl, B.; Li, F.; Wong, A. Fast YOLO: A fast You Only Look Once system for real-time embedded object detection in video. arXiv 2017, arXiv:1709.05943. [Google Scholar]
- Panchal, V.; Sankla, H.; Sharma, A.C.S.S. FPGA implementation of proposed number plate localization algorithm based on YOLOv2 (You Only Look Once). Microsyst. Technol. 2023, 10, 1501–1513. [Google Scholar]
- Redmon, J.; Farhadi, A. Yolov3: An incremental improvement. arXiv 2018, arXiv:1804.02767. [Google Scholar]
- Gunawan, C.R.; Nurdin, N.; Fajriana, F. Design of a real-time object detection prototype system with YOLOv3 (You Only Look Once). Int. J. Eng. Sci. Inf. Technol. 2022, 2, 96–99. [Google Scholar]
- Choi, J.; Chun, D.; Kim, H.; Lee, H.J. Gaussian YOLOv3: An accurate and fast object detector using localization uncertainty for autonomous driving. In Proceedings of the IEEE International Conference on Computer Vision, Seoul, Republic of Korea, 27 October–2 November 2019. [Google Scholar]
- Bochkovskiy, A.; Wang, C.-Y.; Liao, H. Yolov4: Optimal speed and accuracy of object detection. arXiv 2020, arXiv:2004.10934. [Google Scholar]
- Liu, P.; Wang, Q. SCA-YOLOv4: You only look once with squeeze-and-excitation, coordinate attention and adaptively spatial feature fusion. Signal Image Video Process. 2024, 18, 7093–7106. [Google Scholar]
- Wang, C.Y.; Bochkovskiy, A.; Liao, H.Y.M. Scaled-YOLOv4: Scaling cross stage partial network. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Los Angeles, CA, USA, 19–25 June 2021. [Google Scholar]
- Ge, Z.; Liu, S.; Wang, F.; Li, Z.; Sun, J. Yolox: Exceeding yolo series in 2021. arXiv 2021, arXiv:2107.08430. [Google Scholar]
- Zendehdel, N.; Chen, H.; Leu, M.C. Real-time tool detection in smart manufacturing using You-Only-Look Once (YOLO)v5. Manuf. Lett. 2023, 35, 1052–1059. [Google Scholar]
- Gupta, C.; Gill, N.S.; Gulia, P.; Chatterjee, J.M. A novel finetuned YOLOv6 transfer learning model for real-time object detection. J. Real-Time Image Process. 2023, 20, 42. [Google Scholar]
- Li, N.; Wang, M.L.; Yang, G.C.; Li, B.; Yuan, B.H.; Xu, S.K. DENS-YOLOv6: A small object detection model for garbage detection on water surface. Multimed. Tools Appl. 2023, 83, 55751–55771. [Google Scholar] [CrossRef]
- Wang, J.; Li, Q.Q.; Fang, Z.Q.; Zhou, X.L.; Tang, Z.W.; Han, Y.L.; Ma, Z.L. YOLOv6-ESG: A lightweight seafood detection method. J. Mar. Sci. Eng. 2023, 11, 1623. [Google Scholar] [CrossRef]
- Cai, L.M.; Zha, G.Z.; Lin, M.S.; Wang, X.; Zhang, H.H. Ocean internal wave detection in SAR images based on improved YOLOv7. IEEE Access 2024, 12, 146852–146865. [Google Scholar]
- Jiang, Z.K.; Su, L.; Sun, Y.X. YOLOv7-Ship: A lightweight algorithm for ship object detection in complex marine environments. J. Mar. Sci. Eng. 2024, 12, 190. [Google Scholar] [CrossRef]
- Patel, K.; Bhatt, C.; Mazzeo, P.L. Improved ship detection algorithm from satellite images using YOLOv7 and Graph Neural Network. Algorithms 2022, 15, 473. [Google Scholar] [CrossRef]
- Song, G.W.; Chen, W.; Zhou, Q.L.; Guo, C.K. Underwater robot target detection algorithm based on YOLOv8. Electronics 2024, 13, 3374. [Google Scholar] [CrossRef]
- Zhang, F.B.; Cao, W.Y.; Gao, J.; Liu, S.B.; Li, C.Y.; Song, K.; Wang, H.W. Underwater object detection algorithm based on an improved YOLOv8. J. Mar. Sci. Eng. 2024, 12, 1991. [Google Scholar] [CrossRef]
- Qu, S.M.; Cui, C.; Duan, J.L.; Lu, Y.Y.; Pang, Z.L. Underwater small target detection under YOLOv8-LA model. Sci. Rep. 2024, 14, 16108. [Google Scholar] [CrossRef]
- Sharma, A.; Kumar, V.; Longchamps, L. Comparative performance of YOLOv8, YOLOv9, YOLOv10, YOLOv11 and Faster R-CNN models for detection of multiple weed species. Smart Agric. Technol. 2024, 9, 100648. [Google Scholar]
- Yuan, X.; Li, J.P.; Wang, W.W.; Zhou, X.T.; Li, N.; Yu, C.L. Improved YOLOv9 for underwater side scan sonar target detection. Comput. J. 2024, 2024, bxae134. [Google Scholar] [CrossRef]
- Tu, W.; Yu, H.; Wu, Z.J.; Li, J.; Cui, Z.B.; Yang, Z.Y.; Zhang, X.; Wang, Y. YOLOv10-UDFishNet: Detection of diseased Takifugu rubripes juveniles in turbid underwater environments. Aquac. Int. 2025, 33, 125. [Google Scholar]
- Gomes-Pereira, J.N.; Auger, V.; Beisiegel, K.; Benjamin, R.; Bergmann, M.; Bowden, D.; Buhl-Mortensen, P.; De Leo, F.C.; Dionísio, G.; Durden, J.M.; et al. Current and future trends in marine image annotation software. Prog. Oceanogr. 2016, 149, 106–120. [Google Scholar] [CrossRef]
- Schoening, T.; Osterloff, J.; Nattkemper, T.W. RecoMIA-recommendations for marine image annotation: Lessons learned and future directions. Front. Mar. Sci. 2016, 3, 59. [Google Scholar] [CrossRef]
- Giordano, D.; Palazzo, S.; Spampinato, C. A diversity-based search approach to support annotation of a large fish image dataset. Multimed. Syst. 2016, 22, 725–736. [Google Scholar]
- Sánchez, J.S.; Lisani, J.L.; Catalán, I.A.; Alvarez-Ellacuría, A. Leveraging bounding box annotations for fish segmentation in underwater images. IEEE Access 2023, 11, 125984–125994. [Google Scholar]
- Jeon, M.H.; Lee, Y.; Shin, Y.S.; Jang, H.; Yeu, T.K.; Kim, A. Synthesizing image and automated annotation tool for CNN based under water object detection. J. Korea Robot. Soc. 2019, 14, 139–149. [Google Scholar]
- Zurowietz, M.; Langenkämper, D.; Hosking, B.; Ruhl, H.A.; Nattkemper, T.W. MAIA-A machine learning assisted image annotation method for environmental monitoring and exploration. PLoS ONE 2018, 13, e0207498. [Google Scholar]
- Wu, Q.H.; Liu, Y.; Zhang, J.Y.; Wang, Y.P. Intelligent annotation algorithm based on deep-sea macrobenthic images. Comput. Inform. 2022, 41, 739–756. [Google Scholar]
- Lisani, J.L.; Petro, A.B.; Sbert, C.; Alvarez-Ellacuria, A.; Catalan, I.A.; Palmer, M. Analysis of underwater image processing methods for annotation in deep learning based fish detection. IEEE Access 2022, 10, 130359–130372. [Google Scholar]
- Li, Z.C.; Xie, H.J.; Feng, J.Y.; Wang, Z.B.; Yuan, Z.Z. YOLOv7-PE: A Precise and Efficient Enhancement of YOLOv7 for Underwater Target Detection. IEEE Access 2024, 12, 133937–133951. [Google Scholar]
- Ren, L.Q.; Li, Z.Y.; He, X.Y.; Kong, L.Y.; Zhang, Y.H. An underwater target detection algorithm based on attention mechanism and improved YOLOv7. CMC Comput. Mater. Contin. 2024, 78, 2829–2845. [Google Scholar]
- Chen, X.; Yuan, M.J.H.; Yang, Q.; Yao, H.Y.; Wang, H.Y. Underwater-YCC: Underwater target detection optimization algorithm based on YOLOv7. J. Mar. Sci. Eng. 2023, 11, 995. [Google Scholar] [CrossRef]
- Yang, Q.; Meng, H.J.; Gao, Y.C.; Gao, D.X. A real-time object detection method for underwater complex environments based on FasterNet-YOLOv7. J. Real Time Image Process. 2023, 21, 8. [Google Scholar]
- Liu, K.Y.; Sun, Q.; Sun, D.M.; Peng, L.; Yang, M.D.; Wang, N.Z. Underwater target detection based on improved YOLOv7. J. Mar. Sci. Eng. 2023, 11, 677. [Google Scholar] [CrossRef]
- Qin, J.H.; Zhou, H.L.; Yi, H.; Ma, L.Y.; Nie, J.H.; Huang, T.T. YOLOv7-GCM: A detection algorithm for creek waste based on improved YOLOv7 model. Pattern Anal. Appl. 2024, 27, 116. [Google Scholar]
- Yu, G.Y.; Cai, R.L.; Su, J.P.; Hou, M.X.; Deng, R.L. U-YOLOv7: A network for underwater organism detection. Ecol. Inform. 2023, 75, 102108. [Google Scholar]
- Fu, J.S.; Tian, Y. Improved YOLOv7 underwater object detection based on attention mechanism. Eng. Lett. 2024, 32, 1377–1384. [Google Scholar]
- Gao, Y.; Li, Z.Y.; Zhang, K.Y.; Kong, L.Y. GCP-YOLO: A lightweight underwater object detection model based on YOLOv7. J. Real-Time Image Process. 2024, 22, 3. [Google Scholar]
- Zhao, L.; Yun, Q.; Yuan, F.C.; Ren, X.; Jin, J.W.; Zhu, X.C. YOLOv7-CHS: An emerging model for underwater object detection. J. Mar. Sci. Eng. 2023, 11, 1949. [Google Scholar] [CrossRef]
- Yi, W.G.; Wang, B. Research on underwater small target detection algorithm based on improved YOLOv7. IEEE Access 2023, 11, 66818–66827. [Google Scholar] [CrossRef]
- Lu, D.H.; Yi, J.X.; Wang, J. Enhanced YOLOv7 for improved underwater target detection. J. Mar. Sci. Eng. 2024, 12, 1127. [Google Scholar] [CrossRef]
- Zhao, M.; Zhou, H.B.; Li, X. YOLOv7-SN: Underwater target detection algorithm based on improved YOLOv7. Symmetry 2024, 16, 514. [Google Scholar] [CrossRef]
- Chen, Z.; Xie, G.H.; Chen, M.S.; Qiu, H.B. Model for underwater acoustic target recognition with attention mechanism based on residual concatenate. J. Mar. Sci. Eng. 2024, 12, 24. [Google Scholar] [CrossRef]
- Ou, J.Y.; Shen, Y.J. Underwater target detection based on improved YOLOv7 algorithm with BiFusion neck structure and MPDIoU loss function. IEEE Access 2024, 12, 105165–105177. [Google Scholar] [CrossRef]
- Yuan, M.; Meng, H.; Wu, J.B.; Cai, S.W. Global Recurrent Mask R-CNN: Marine ship instance segmentation. Comput. Graph. 2025, 126, 104112. [Google Scholar] [CrossRef]
- Zeng, J.X.; Ouyang, H.; Liu, M.; Leng, L.; Fu, X. Multi-scale YOLACT for instance segmentation. J. King Saud Univ.—Comput. Inf. Sci. 2022, 34, 9419–9427. [Google Scholar] [CrossRef]
- Huang, H.H.; Zuo, Z.; Sun, B.; Wu, P.; Zhang, J.J. DSA-SOLO: Double Split Attention SOLO for side-scan sonar target segmentation. Appl. Sci. 2022, 12, 9365. [Google Scholar] [CrossRef]
- Song, Y.; Zhu, Y.; Li, G.; Feng, C.; He, B.; Yan, T. Side scan sonar segmentation using deep convolutional neural network. In Proceedings of the Oceans, Anchorage, AK, USA, 18–21 September 2017. [Google Scholar]
- Liu, S.; Qi, L.; Qin, H.; Shi, J.; Jia, J. Path aggregation network for instance segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018. [Google Scholar]
- Chaurasia, K.; Nandy, R.; Pawar, O.; Singh, R.R.; Ahire, M. Semantic segmentation of high-resolution satellite images using deep learning. Earth Sci. Inform. 2021, 14, 2161–2170. [Google Scholar] [CrossRef]
- Zheng, Y.G.; Zhang, H.S.; Qi, K.T.; Ding, L.Y. Stripe segmentation of oceanic internal waves in SAR images based on SegNet. Geocarto Int. 2022, 37, 8567–8578. [Google Scholar] [CrossRef]
- Yu, H.F.; Li, X.B.; Feng, Y.K.; Han, S. Multiple attentional path aggregation network for marine object detection. Appl. Intell. 2022, 53, 2434–2451. [Google Scholar] [CrossRef]
- Li, B.; Xu, J.; Chu, L.L.; Yang, Y.Q.; Huang, X.L.; Liu, P. Oil film semantic segmentation method in X-band marine radar remote sensing images. IEEE Geosci. Remote Sens. Lett. 2023, 20, 1503205. [Google Scholar] [CrossRef]
- Han, K.B.; Chen, M.J.; Gao, C.Z.; Qing, C.M. DCA-Unet: Enhancing small object segmentation in hyperspectral images with Dual Channel Attention Unet. J. Frankl. Inst. 2025, 362, 107532. [Google Scholar] [CrossRef]
- Li, J.J.; Wang, H.F.; Zhang, A.B.; Liu, Y.L. Semantic segmentation of hyperspectral remote sensing images based on PSE-UNet model. Sensors 2022, 22, 9678. [Google Scholar] [CrossRef]
- Hasimoto-Beltran, R.; Canul-Ku, M.; Mendez, G.M.D.; Ocampo-Torres, F.J.; Esquivel-Trava, B. Ocean oil spill detection from SAR images based on multi-channel deep learning semantic segmentation. Mar. Pollut. Bull. 2023, 188, 114651. [Google Scholar] [CrossRef]
- Miao, J.; Xu, S.W.; Zou, B.X.; Qiao, Y.H. ResNet based on feature-inspired gating strategy. Multimed. Tools Appl. 2022, 81, 19283–19300. [Google Scholar] [CrossRef]
- Chen, H.T.; Lee, S.; Yao, D.; Jeong, D. Sea clutter image segmentation method of high frequency surface wave radar based on the improved Deeplab network. IEICE Trans. Fundam. Electron. Commun. Comput. Sci. 2022, E105A, 730–733. [Google Scholar] [CrossRef]
- Liu, F.F.; Fang, M. Semantic segmentation of underwater images based on improved Deeplab. J. Mar. Sci. Eng. 2020, 8, 188. [Google Scholar] [CrossRef]
- Cheng, L.X.; Li, Y.; Zhao, K.J.; Liu, B.X.; Sun, Y.H. A two-stage oil spill detection method based on an improved superpixel module and DeepLab V3+ using SAR images. IEEE Geosci. Remote Sens. Lett. 2024, 22, 3508020. [Google Scholar] [CrossRef]
- Yu, Z.M.; Wan, F.; Lei, G.B.; Xiong, Y.; Xu, L.; Ye, Z.W.; Liu, W.; Zhou, W.; Xu, C.Z. RSLC-Deeplab: A ground object classification method for high-resolution remote sensing images. Electronics 2023, 12, 3653. [Google Scholar] [CrossRef]
- Chen, Y.T.; Li, Y.Y.; Wang, J.S. An end-to-end oil-spill monitoring method for multisensory satellite images based on deep semantic segmentation. Sensors 2020, 20, 725. [Google Scholar] [CrossRef] [PubMed]
- Wang, Q.; Zhang, Y.X.; He, B. Intelligent marine survey: Lightweight multi-scale attention adaptive segmentation framework for underwater target detection of AUV. IEEE Trans. Autom. Sci. Eng. 2024, 22, 1913–1927. [Google Scholar] [CrossRef]
- Brockett, P.L.; Hinich, M.; Wilson, G.R. Nonlinear and non-Gaussian ocean noise. J. Acoust. Soc. Am. 1987, 82, 1386–1394. [Google Scholar] [CrossRef]
- Williams, R.; Veirs, S.; Veirs, V.; Ashe, E.; Mastick, N. Approaches to reduce noise from ships operating in important killer whale habitats. Mar. Pollut. Bull. 2019, 139, 459–469. [Google Scholar]
- Qian, T.; Li, Y. Nonlinear perception characteristics analysis of ocean white noise based on deep learning algorithms. Mathematics 2024, 12, 2892. [Google Scholar] [CrossRef]
- Matthews, L.P.; Parks, S.E. An overview of North Atlantic right whale acoustic behavior, hearing capabilities, and responses to sound. Mar. Pollut. Bull. 2021, 173, 113043. [Google Scholar] [PubMed]
- Traverso, F.; Vernazza, G.; Trucco, A. Simulation of non-White and non-Gaussian underwater ambient noise. In Proceedings of the Oceans MTS/IEEE, Yeosu, Republic of Korea, 21–24 May 2012. [Google Scholar]
- Ainslie, M.A.; McColm, A.C.E. Underwater Acoustics: Principles and Techniques; Springer: Berlin/Heidelberg, Germany, 2018; pp. 1–10. [Google Scholar]
- Rogers, J.S.; Wales, S.C.; Means, S.L. Ambient noise forecasting with a large acoustic array in a complex shallow water environment. J. Acoust. Soc. Am. 2017, 142, EL473–EL477. [Google Scholar]
- Wilson, J.D.; Makris, N.C. Quantifying hurricane destructive power, wind speed, and air-sea material exchange with natural undersea sound. Geophys. Res. Lett. 2008, 35, L10603. [Google Scholar]
- Da, L.L.; Wang, C.; Han, M.; Zhang, L. Ambient noise spectral properties in the north area of Xisha. Acta Oceanol. Sin. 2014, 33, 206–211. [Google Scholar]
- Audoly, C.; Lantéri, F. Modeling of the influence of the self noise on the array gain of a sonar system. Appl. Acoust. 2001, 62, 1095–1105. [Google Scholar]
- Zang, X.; Yin, T.; Hou, Z.; Mueller, R.P.; Deng, Z.D.; Jacobson, P.T. Deep learning for automated detection and identification of migrating American eel Anguilla rostrata from imaging sonar data. Remote Sens. 2021, 13, 2671. [Google Scholar] [CrossRef]
- Xiao, J.; Zou, W.; Zhang, S.; Lei, J.; Wang, W.; Wang, Y. Video denoising algorithm based on improved dual-domain filtering and 3D block matching. IET Image Process. 2018, 12, 2250–2257. [Google Scholar]
- Jantzi, A.; Rumbaugh, L.; Jemison, W. Spatial optical coherence filtering for scatter rejection in underwater laser systems. In Proceedings of the Ocean Sensing and Monitoring XI, Baltimore, MD, USA, 16–17 April 2019. [Google Scholar]
- Zhang, Y.Y.; Yang, Z.X.; Du, X.L.; Luo, X.Y. A new method for denoising underwater acoustic signals based on EEMD, correlation coefficient, permutation entropy, and wavelet threshold denoising. J. Mar. Sci. Appl. 2024, 23, 101–112. [Google Scholar]
- Fan, C.Y.; Li, C.F.; Yang, S.H.; Liu, X.Y.; Liao, Y.Q. Application of CEEMDAN combined wavelet threshold denoising algorithm to suppressing scattering cluster in underwater lidar. Acta Physic Sin. 2023, 72, 224203. [Google Scholar]
- Yan, L.; Piao, S.C.; Xu, F. Orthogonal waveform separation in multiple-input and multiple-output imaging sonar with fractional Fourier filtering. Iet Radar Sonar Navig. 2021, 15, 471–484. [Google Scholar]
- Hong, J.; Bae, I.; Seok, J. Wiener filtering-based ambient noise reduction technique for improved acoustic target detection of directional frequency analysis and recording sonobuoy. J. Acoust. Soc. Korea 2022, 41, 192–198. [Google Scholar]
- Hubert, P.; Padovese, L.; Martins, F. Bayesian estimation of the size distribution of air bubbles in water. J. Braz. Soc. Mech. Sci. Eng. 2021, 43, 527. [Google Scholar]
- Yang, W.Y.; Chang, W.L.; Song, Z.C.; Niu, F.Q.; Wang, X.Y.; Zhang, Y. denoising odontocete echolocation clicks using a hybrid model with convolutional neural network and long short-term memory network. J. Acoust. Soc. Am. 2023, 154, 938–947. [Google Scholar]
- Wang, S.W.; Song, P.; Tan, J.; He, B.S.; Xia, D.M.; Wang, Q.Q.; Du, G.N. Deep learning-based attenuation for shear-wave leakage from ocean-bottom node data. Geophysics 2023, 88, V127–V137. [Google Scholar]
- Sorkhabi, O.M.; Asgari, J.; Amiri-Simkooei, A. Monitoring of Caspian Sea-level changes using deep learning-based 3D reconstruction of GRACE signal. Measurement 2021, 174, 109004. [Google Scholar] [CrossRef]
- Amiri, A.; Kimiaghalam, B. Robust watermarking with PSO and DnCNN. Signal Image Video Process. 2024, 18 (Suppl. S1), 663–676. [Google Scholar] [CrossRef]
- Lu, S.Q.; Guan, F.X.; Zhang, H.Y.; Lai, H.T. Underwater image enhancement method based on denoising diffusion probabilistic model. J. Vis. Commun. Image Represent. 2023, 96, 103926. [Google Scholar] [CrossRef]
- Guan, M.S.; Xu, H.Y.; Jiang, G.Y.; Yu, M.; Chen, Y.Y.; Luo, T.; Zhang, X.B. DiffWater: Underwater image enhancement based on conditional denoising diffusion probabilistic model. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2024, 17, 2319–2335. [Google Scholar] [CrossRef]
- Zheng, Z.Q.; Wang, C.; Yu, Z.B.; Zheng, H.Y.; Zheng, B. Instance map based image synthesis with a denoising generative adversarial network. IEEE Access 2018, 6, 33654–33665. [Google Scholar] [CrossRef]
- Saranya, S.; Vellaturi, P.K.; Velichala, V.R.; Vemule, C.K. Analyzing image denoising using generative adversarial network. J. Pharm. Negat. Results 2022, 13 (Suppl. S3), 307–310. [Google Scholar]
- Li, Z.Y.; Wang, Z.S.; Chen, D.S.; Yip, T.L.; Teixeira, A.P. RepDNet: A re-parameterization despeckling network for autonomous underwater side-scan sonar imaging with prior-knowledge customized convolution. Def. Technol. 2024, 35, 259–274. [Google Scholar] [CrossRef]
- Zhou, A.L.; Zhang, W.; Li, X.Y.; Xu, G.J.; Zhang, B.B.; Ma, Y.X.; Song, J.Q. A novel noise-aware deep learning model for underwater acoustic denoising. IEEE Trans. Geosci. Remote Sens. 2023, 61, 4202813. [Google Scholar] [CrossRef]
- Madhusudhanarao, K.; Krishna, K.M.; Krishna, B.T. An efficient noise reduction technique in underwater acoustic signals using enhanced optimization-based residual recurrent neural network with novel loss function. Int. J. Wavelets Multiresolution Inf. Process. 2024, 23, 2450048. [Google Scholar] [CrossRef]
- Domingos, L.C.F.; Santos, P.E.; Skelton, P.S.M.; Brinkworth, R.S.A.; Sammut, K. An investigation of preprocessing filters and deep learning methods for vessel type classification with underwater acoustic data. IEEE Access 2022, 10, 117582–117596. [Google Scholar] [CrossRef]
- Lu, Y.; Liu, R.W.; Chen, F.; Xie, L. Learning a deep convolutional network for speckle noise reduction in underwater sonar images. In Proceedings of the 11th International Conference on Machine Learning and Computing, Zhuhai, China, 22–24 February 2019. [Google Scholar]
- Ji, S.; Xu, S.; Xu, S.; Cheng, Q.; Xiao, N.; Zhou, C.; Xiong, M. A masked-pre-training-based fast deep image prior denoising model. Appl. Sci. 2024, 14, 5125. [Google Scholar] [CrossRef]
- Huo, C.L.; Zhang, D.; Yang, H.Y. An underwater image denoising method based on high-frequency abrupt signal separation and hybrid attention mechanism. Sensors 2024, 24, 4578. [Google Scholar] [CrossRef] [PubMed]
- Chen, J.; Liu, C.; Xie, J.W.; An, J.; Huang, N. Time-Frequency Mask-Aware Bidirectional LSTM: A deep learning approach for underwater acoustic signal separation. Sensors 2022, 22, 5598. [Google Scholar] [CrossRef] [PubMed]
- Yao, X.H.; Yang, H.H.; Sheng, M.P. Feature fusion based on Graph Convolution Network for modulation classification in underwater communication. Entropy 2023, 25, 1096. [Google Scholar] [CrossRef]
- Song, Y.Q.; Liu, F.; Shen, T.S. Method of underwater acoustic signal denoising based on dual-path transformer network. IEEE Access 2024, 12, 81483–81494. [Google Scholar]

 represents the image compression process.
represents the image compression process.
represents the image compression process.
represents the image compression process.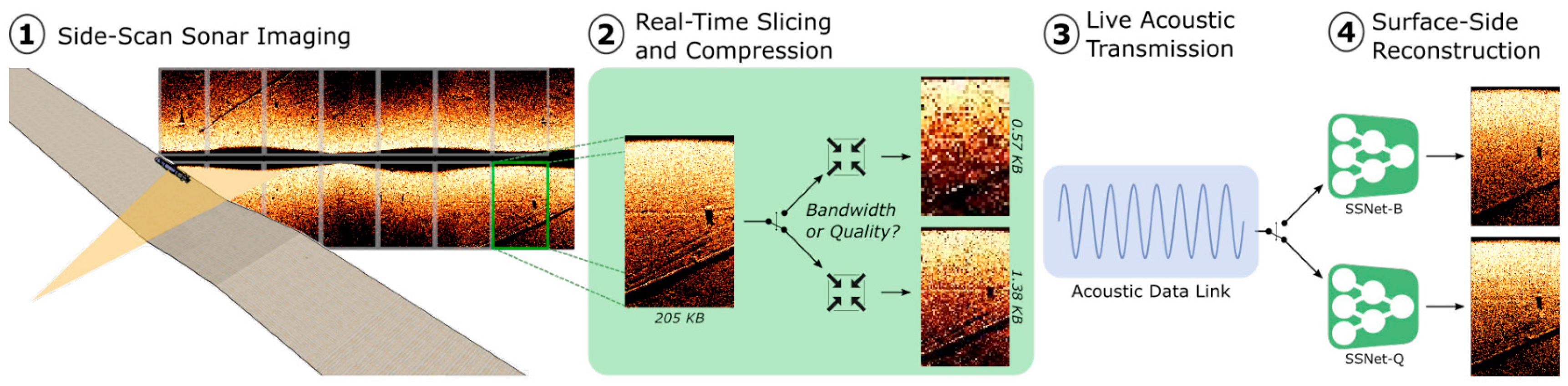


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Network Model | Inference Method | Advantage | Limitation | Adaptation Scenarios |
|---|---|---|---|---|
| Faster R-CNN | Generate candidate regions and then classify and regress them | High precision and excellent performance in complex scenes | Slow speed, difficult to meet real-time requirements | Scenarios that require high precision but not strict speed requirements |
| SSD | Directly output target’s category and location, using multi-scale feature maps | Fast speed, suitable for real-time applications | Poor performance in detecting small targets | Real-time detection with moderate precision requirements |
| YOLO | Divide the image into grids, and each grid predicts multiple bounding boxes and category probabilities | Extremely fast, suitable for high real-time requirements | Relatively low accuracy, poor performance in detection of small and dense targets | Scenarios with extremely high speed requirements |
| Model Version | References | Network Architecture | Multi-Scale Prediction | Activation Function | Loss Function |
|---|---|---|---|---|---|
| YOLOv1 | Redmon et al. [132] | FCN | Anchor-Free | Leaky ReLU | MSE for location, classification, and confidence |
| YOLOv2 | Redmon et al. [142] Shafiee et al. [143] Panchal et al. [144] | Darknet-19 | Anchor-box | Leaky ReLU | MSE for location; BCE for classification |
| YOLOv3 | Redmon et al. [145] Gunawan et al. [146] Gaussian YOLOv3 [147] | Darknet-53 | Anchor-box+ FPN | Leaky ReLU | MSE for location; BCE for classification and confidence |
| YOLOv4 | Bochkovskiy et al. [148] Liu et al. [149] Scaled YOLOv4 [150] | CSPDarknet-53 | Anchor-box+ PAN | Mish | CIoU for location; BCE for classification and confidence |
| YOLOv5 | Ge et al. [151] Zendehdel et al. [152] | CSPDarknet-53 | Anchor-box+ PAN + FPN | SiLU | CIoU for location; Focal loss for classification and confidence |
| YOLOv6 | Gupta et al. [153] Li et al. [154] YOLOv6-ESG [155] | CSPDarknet-53 | Anchor-Free+ PAN + FPN | ReLU | CIoU/GIoU for location; Focal loss for classification; BCE for confidence |
| YOLOv7 | Cai et al. [156] Jiang et al. [157] Patel et al. [158] | Extended CSPDarknet-53 | Anchor-box+ PAN + FPN; Introducing more cross-scale connections | SiLU | CIoU for location; BCE for classification and confidence |
| YOLOv8 | Song et al. [159] Zhang et al. [160] Qu et al. [161] | Extended CSPDarknet-53 (optimized version) | Anchor-Free+ PAN + FPN; Further optimization of cross-scale connectivity and feature transfer | SiLU | CIoU for location; BCE for classification and confidence; DFL for classification optimization |
| Model Version | Detection Accuracy (mAP) | Inference Speed (FPS) | Resource Consumption (Parameter Quantity/Model Size) | Detection Ability Performance | Ocean Perception Scene Adaptability |
|---|---|---|---|---|---|
| YOLOv1 | 63.4% (VOC 2007 test) | 45 | About 7.5 M/25 MB | Moderate positioning ability, basic classification (only 20 categories), high real-time performance, but low accuracy | Simple static target detection (large sunken ship) |
| YOLOv2 | 76.8% (VOC 2007 test) | 67 | About 50 M/67 MB | High positioning ability, supporting more categories, balance between speed and accuracy | Medium-scale target detection (submersibles, buoys) |
| YOLOv3 | 55.3% (COCO AP50-95) | 30–50 | About 62 M/236 MB | High positioning ability, enhanced classification ability (80 categories), strong robustness in complex scenes | Multi-scale targets (fish schools, floating objects) |
| YOLOv4 | 65.7% (COCO AP50-95) | 50–80 | About 64 M/244 MB | Extremely high positioning ability, multi category classification optimization, suitable for high-resolution ocean images | High-precision underwater terrain mapping |
| YOLOv5 | 68.9% (COCO AP50-95) | 100–140 | About 7.0 M/27 MB (YOLOv5s) | Extremely high positioning ability, supporting custom categories, lightweight model suitable for edge devices | Underwater fuzzy targets and real-time ocean monitoring |
| YOLOv6 | 69.5% (COCO AP50-95) | 300–500 | About 12 M/38 MB (YOLOv6n) | High positioning ability, improved classification efficiency, suitable for low computing power scenarios | Real-time detection optimization and dynamic ocean target tracking |
| YOLOv7 | 71.3% (COCO AP50-95) | 160–200 | About 37 M/71 MB | Extremely high positioning ability, fine-grained classification capability, excellent in handling occluded targets | High-density object detection (fish schools, coral reefs) |
| YOLOv8 | 72.5% (COCO AP50-95) | 180–220 | About 3.2 M/6.2 MB (YOLOv8n) | High positioning ability, classification-independent optimization, balanced speed, and accuracy | Strong universality and adaptability to the diversity of marine targets |
| References | Attention Mechanism | Enhancement Effect |
|---|---|---|
| Li et al. [173] Ren et al. [174] Chen et al. [175] | Convolutional block attention module (CBAM) | Enhanced channel and spatial dimension features |
| Yang et al. [176] | Cross-modal Transformer attention | |
| Liu et al. [177] Qin et al. [178] | Global attention mechanism | Multi-scale feature fusion and enhancement |
| Yu et al. [179] | 3D attention mechanism | Improved anti-interference abilities in underwater recognition |
| Fu et al. [180] Gao et al. [181] | Coordinate attention (CA) | Enhanced spatial information and prevention of feature loss |
| Zhao et al. [182] | Simple parameter-free attention | Combination of channel domain and spatial domain |
| Yi et al. [183] | SENet attention mechanism | Enhanced feature expression and small-target feature information extraction capabilities |
| Lu et al. [184] | SimAM attention mechanism | |
| Zhao et al. [185] Chen et al. [186] | Channel attention module (SE) | Enhanced adaptive feature extraction capabilities |
| Ou et al. [187] | LSKA attention mechanism | Enhanced multi-scale feature extraction capabilities |
| Method | Core Innovations | Denoising Strategies | Applicable Scenarios | Limitations |
|---|---|---|---|---|
| DnCNN | Residual Learning +Deep CNN | Directly learning noise distribution through residual mapping | Annotating static noise scenes with sufficient data | Weak dynamic noise processing and poor real-time performance |
| DDPM | Diffusion process +noise prediction | Modeling data distribution through Markov chain with progressive addition | Complex noise (pulse/biological noise) and unsupervised scenarios | High computational cost and insufficient physical consistency |
| DnGAN | Generator residual learning +multi-scale discriminator | Dynamic complex noise modeling and noise-clean image mapping | Multi-modal and dynamic noise (underwater optical, sonar, and remote noise) | High computational cost, insufficient data and physical consistency |
| References | Network Structures | Denoising Method |
|---|---|---|
| Li et al. [233] | Re-parameterization despeckling convolutional neural network (RepDNet) | Introduced pixel smoothing blocks (PSB) and edge enhancement blocks (EEB) |
| Zhou et al. [234] | Noise-aware deep learning model with fullband–subband attention network (NAFSA-Net) | Designing different subnetworks to estimate noise and signal components and extract signal features |
| Madhusudhanarao et al. [235] | Advanced recurrent neural network with novel loss function (ARRNN-NLF) | Enhanced Osprey Optimization Algorithm (EOOA) to enhance the denoising model |
| Domingos et al. [236] | VGGNet | Extracting multi-level features through deep convolutional stacking to identify noise |
| Lu et al. [237] | Deep blind despeckling network (DSPNet) | Introducing a feature pyramid network (FPN) and the atrous spatial pyramid pool (ASPP) to estimate and reduce random noise |
| Ji et al. [238] | Masked-Pre-training-Based Fast DIP (MPFDIP) | Improving denoising and performance by learning the intrinsic structural priors of images during the pre-training phase |
| Huo et al. [239] | High-Frequency Abrupt Signal Separation and Hybrid Attention Mechanism (HHDNet) | Utilizing a dual branch network architecture to handle high and low frequencies, and combines a hybrid attention module to remove high-frequency burst noise |
| Chen et al. [240] | Recurrent neural networks (RNNs) | Using a T-F-mask-aware bidirectional long short-term memory (Bi-LSTM) approach |
| Yao et al. [241] | Graph convolution networks (GCNs) | Extracting multi-domain features and deep features |
| Song and Shen [242]. Boosting R-CNN | Dual-Path Transformation Network (DPTN) | Constructing a neural network transformer based on feed-forward network to extract nonlinear noise features |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, H.; Li, Y.; Qian, T.; Tang, Y. Recent Progress in Ocean Intelligent Perception and Image Processing and the Impacts of Nonlinear Noise. Mathematics 2025, 13, 1043. https://doi.org/10.3390/math13071043
Liu H, Li Y, Qian T, Tang Y. Recent Progress in Ocean Intelligent Perception and Image Processing and the Impacts of Nonlinear Noise. Mathematics. 2025; 13(7):1043. https://doi.org/10.3390/math13071043
Chicago/Turabian StyleLiu, Huayu, Ying Li, Tao Qian, and Ye Tang. 2025. "Recent Progress in Ocean Intelligent Perception and Image Processing and the Impacts of Nonlinear Noise" Mathematics 13, no. 7: 1043. https://doi.org/10.3390/math13071043
APA StyleLiu, H., Li, Y., Qian, T., & Tang, Y. (2025). Recent Progress in Ocean Intelligent Perception and Image Processing and the Impacts of Nonlinear Noise. Mathematics, 13(7), 1043. https://doi.org/10.3390/math13071043