

On the Existence and Uniqueness of Solutions for Neutral-Type Caputo Fractional Differential Equations with Iterated Delays: Hyers–Ulam–Mittag–Leffler Stability


{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
- i.
- ii.
2. Fractional Calculus: Definitions
- (i)
- The fractional order integral α of a function f with a lower limit of integration a can be determined by the formulawhere is the gamma function.
- (ii)
- The Riemann–Liouville fractional derivative is given by
- (iii)
- The Caputo fractional derivative for all of fractional order α is expressed asIf f is absolutely continuous on , then, the next formula gives a direct definition of the Caputo left-sided derivative:
- (a)
- (b)
- (c)
- (d)
- and (Euler’s reflection formula).
3. Existence and Uniqueness of Solutions: Ulam–Hyers–Mittag–Leffler Stability of the Solutions
3.1. Case 1 of the Main Results: Unified Lipschitz Constants
- The function f is defined and continuous in the domain and for (or ) satisfies
- (a)
- (b)
- where is positive constant;
- (c)
- The functions are defined and continuous in the domain and and for satisfies
- (a)
- (b)
- (c)
- where
- (d)
- .
- The inequalityholds for
- The inequalities expressed asandhold for —defined as in condition
- By simple iteration,Inductively, it is easy to see thatAssume that the above inequality holds for i.e., Then, for , we have the initial condition and for we have Let we have Thus, for follows our statement. □
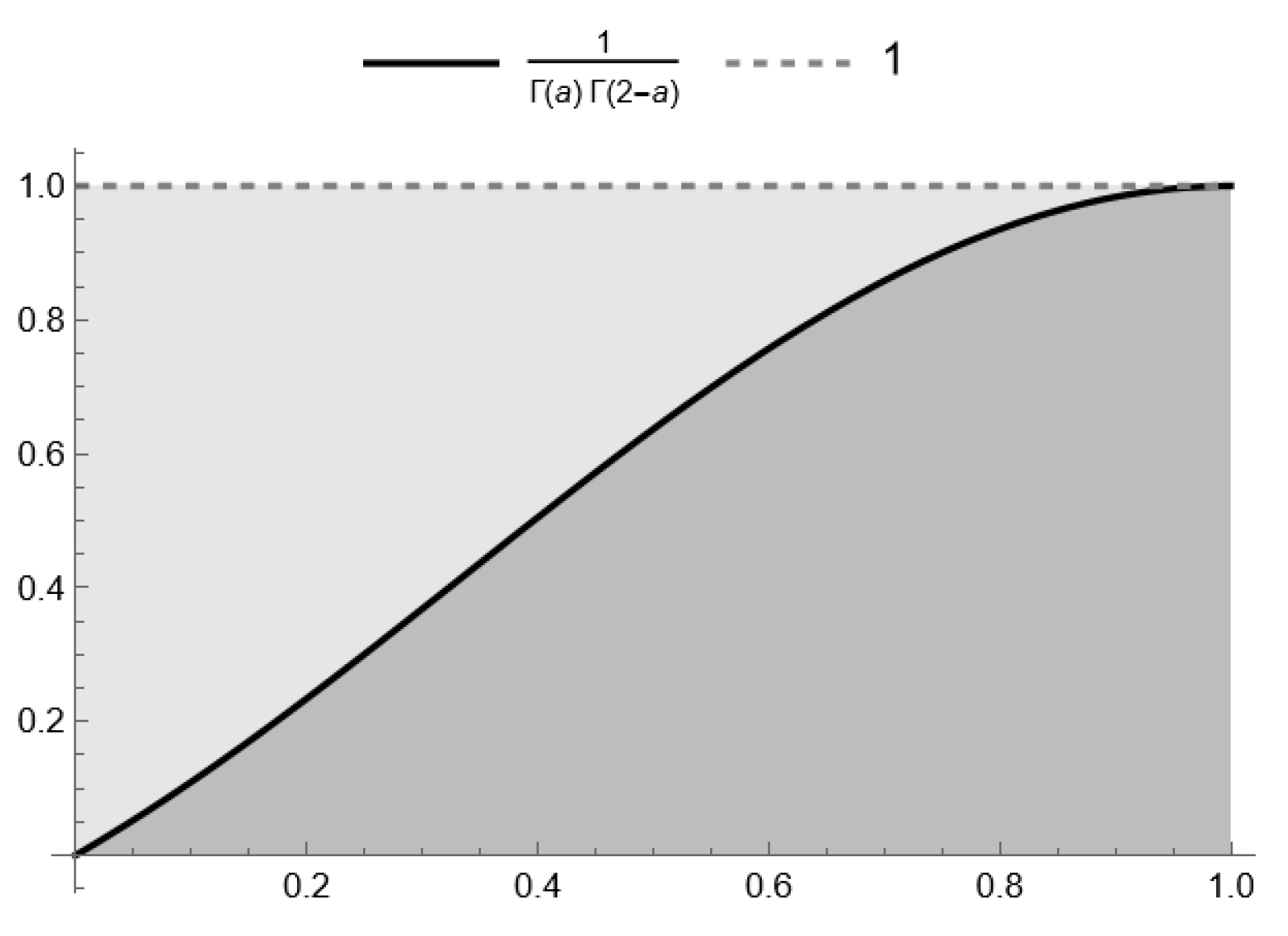
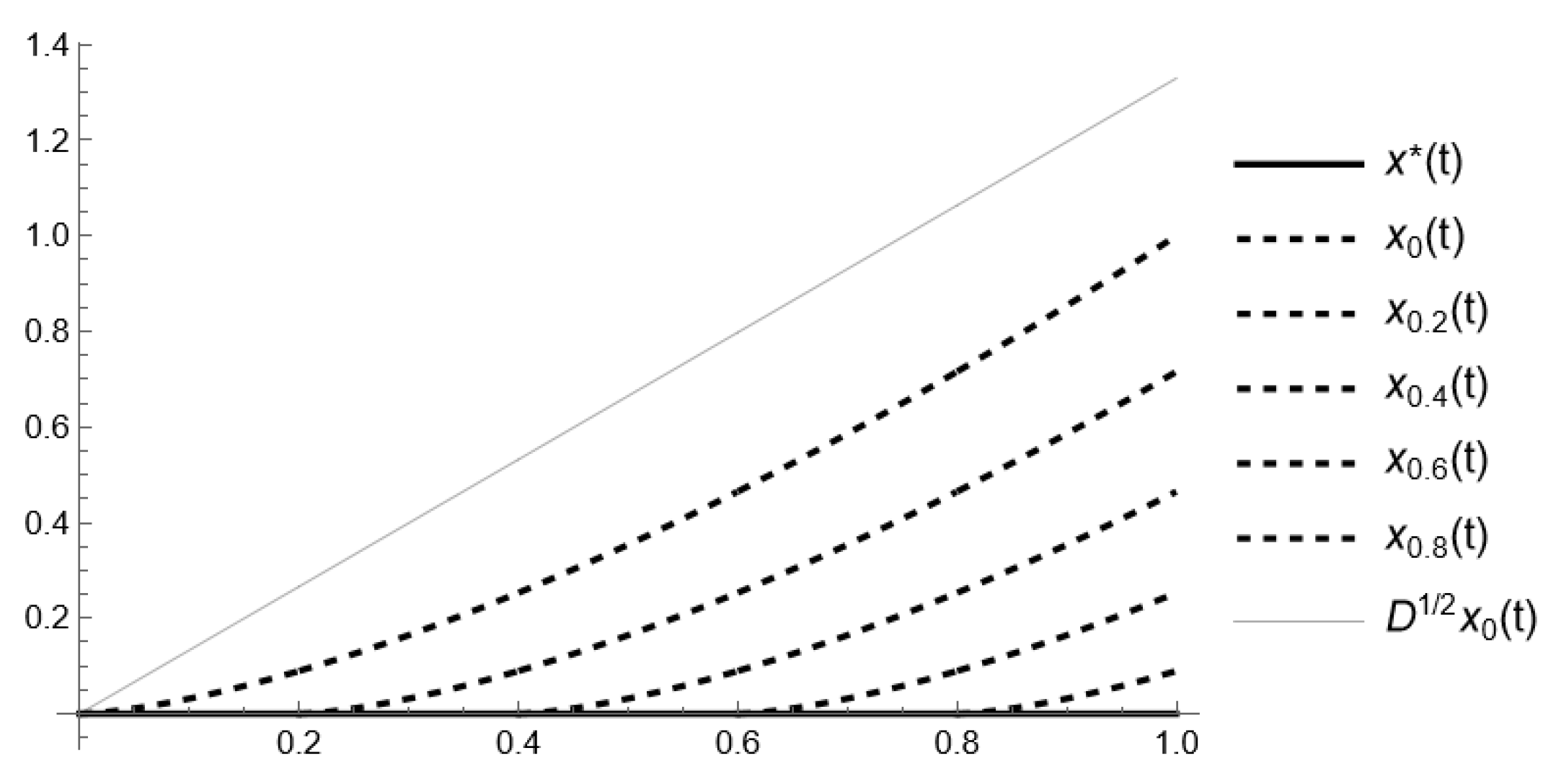
- Obviously, , and for , we haveIn addition, taking into account the first definition of Caputo-type fractional derivative (iii), presented in Definition 1, the assumption , and Euler’s reflection formula (d),Thus,The aforementioned inequality can be directly derived from the relation (c) of the Caputo fractional derivative (Section 2). Nevertheless, for stability analysis, we require the following inequality:Consequently,as the inequality , which confirms our estimation (see Figure 1 and Figure 2).
- (i)
- for all ;
- (ii)
- for all .
3.2. Case 2 of the Main Results: Distinct Lipschitz Constants
- The function f is defined and continuous in the domain and for (or ) satisfies
- (a)
- (b)
- where and are positive constants;
- (c)
- The functions are defined and continuous in the domain and and for satisfy
- (a)
- (b)
- (c)
- where and are positive constants;
- (d)
- The inequalityholds for where and for
- The inequalities expressed asfor andhold for —defined as in condition
4. Applications
5. Conclusions
- 1.
- Establishing sufficient conditions that guarantee the system is Ulam–Hyers–Mittag–Leffler stable over broader intervals for various initial functions;
- 2.
- Exploring classes of neutral-type fractional differential systems incorporating infinite iterative delays but subjected to less stringent constraints on their right-hand side components;
- 3.
- Investigating whether replacing traditional Lipschitz requirements with continuity matrices, such as [9], could lead to new insights in generalized norm applications within appropriate functional spaces.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| Iterated Delays | |
| Caputo Fractional Differential Equation of Neutral Type | |
| Initial Value Problem | |
| Ulam–Hyers–Mittag–Leffler |
References
- Kilbas, A.A.; Srivastava, H.M.; Trujillo, J.J. Theory and Applications of Fractional Differential Equations; Elsevier Science BV: Amsterdam, The Netherlands, 2006. [Google Scholar]
- Podlubny, I. Fractional Differential Equation; Academic Press: San Diego, CA, USA, 1999. [Google Scholar]
- Myshkis, A. Linear Differential Equations with Retarded Argument; Nauka: Moscow, Russia, 1972. (In Russian) [Google Scholar]
- Hale, J.; Lunel, S. Introduction to Functional Differential Equations; Springer Science & Business Media: New York, NY, USA, 1993. [Google Scholar]
- Diethelm, K. The Analysis of Fractional Differential Equations an Application-Oriented Exposition Using Differential Operators of Caputo Type; Lecture Notes in Mathematics; Springer: Berlin, Germany, 2010; Volume 2004. [Google Scholar]
- Phu, N.; Lupulescu, V.; Van Hoa, N. Neutral fuzzy fractional functional differential equations. Fuzzy Sets Syst. 2021, 419, 1–34. [Google Scholar] [CrossRef]
- Shah, R.; Irshad, N. Ulam–Hyers–Mittag–Leffler Stability for a Class of Nonlinear Fractional Reaction–Diffusion Equations with Delay. Int. J. Theor. Phys. 2025, 64, 20. [Google Scholar] [CrossRef]
- Ahmadian, A.; Ismail, F.; Salahshour, S.; Baleanu, D.; Ghaemi, F. Uncertain viscoelastic models with fractional order: A new spectral tau method to study the numerical simulations of the solution. Commun. Nonlinear Sci. Numer. Simul. 2017, 53, 44–64. [Google Scholar] [CrossRef]
- Konstantinov, M.; Bainov, D. Theorems for existence and uniqueness of the solution for systems of differential equations of superneutral type with iterated delay (in Russian). Bull. Math. Soc. Sci. Math. Roum. 1976, 20, 151–158. [Google Scholar]
- Cherepennikov, V.; Ermolaeva, V. Smooth solutions to some differential-difference equations of neutral type. J. Math. Sci. 2008, 149, 1648–1657. [Google Scholar] [CrossRef]
- Cherepennikov, V.; Kim, A. Smooth Solutions of Linear Functional Differential Equations of Neutral Type. In Springer Proceedings in Mathematics & Statistics; Springer: Cham, Switzerland, 2020; Volume 318. [Google Scholar] [CrossRef]
- Cheng, S. Smooth solutions of iterative functional differential equations. Dyn. Syst. and Appl. Proc. 2004, 226, 228–252. [Google Scholar]
- Cheng, S.; Si, J.; Wang, X. An existence theorem for iterative functional differential equations. Acta Math. Hung. 2002, 94, 1–17. [Google Scholar] [CrossRef]
- Si, J.; Zhang, W. Analytic solutions of a class of iterative functional differential equations. J. Comput. Appl. Math. 2004, 162, 467–481. [Google Scholar] [CrossRef]
- Si, J.; Zhang, W.; Cheng, S. Smooth solutions of an iterative functional equation. In Functional Equations and Inequalities; Mathematics and Its Applications; Springer: Dordrecht, The Netherlands, 2000; Volume 518, pp. 221–232. [Google Scholar] [CrossRef]
- Tunç, O. New Results on the Ulam–Hyers–Mittag–Leffler Stability of Caputo Fractional-Order Delay Differential Equations. Mathematics 2024, 12, 9. [Google Scholar] [CrossRef]
- Niazi, A.U.K.; Wei, J.; Rehman, M.; Denghao, P. Ulam-Hyers-Mittag-Leffler stability for nonlinear fractional neutral differential equations. Sb. Math. 2018, 209, 1337–1350. (In Russian) [Google Scholar] [CrossRef]
- Wang, J.; Zhang, Y. Ulam–Hyers–Mittag-Leffler stability of fractional-order delay differential equations. Optimization 2014, 63, 1181–1190. [Google Scholar] [CrossRef]
- Wang, J.; Li, X. Ulam type stability of fractional order ordinary differential equations. J. Appl. Math. Comput. 2014, 45, 449–459. [Google Scholar] [CrossRef]
- Madamlieva, E.; Konstantinov, M.; Milev, M.; Petkova, M. Integral Representation for the Solutions of Autonomous Linear Neutral Fractional Systems with Distributed Delay. Mathematics 2020, 364, 8. [Google Scholar] [CrossRef]
- Konstantinov, M.; Madamlieva, E.; Petkova, M.; Cholakov, S. Asymptotic stability of nonlinear perturbed neutral linear fractional system with distributed delay. Aip Conf. Proc. 2021, 2333, 1. [Google Scholar] [CrossRef]
- Kiskinov, H.; Madamlieva, E.; Zahariev, A. Hyers–Ulam and Hyers–Ulam–Rassias stability for Linear Fractional Systems with Riemann–Liouville Derivatives and Distributed Delays. Axioms 2023, 12, 637. [Google Scholar] [CrossRef]
- Etemad, S.; Stamova, I.; Ntouyas, S.K.; Tariboon, J. Quantum Laplace Transforms for the Ulam–Hyers Stability of Certain q-Difference Equations of the Caputo-like Type. Fractal Fract. 2024, 8, 443. [Google Scholar] [CrossRef]
- Tunç, O.; Tunç, C. Ulam stabilities of nonlinear iterative integro-differential equations. Rev. Real Acad. Cienc. Exactas Fis. Nat. Ser. A-Mat. 2023, 117, 118. [Google Scholar] [CrossRef]
- Krol, K. Asymptotic properties of fractional delay differential equations. Appl. Math. Comput. 2011, 218, 1515–1532. [Google Scholar] [CrossRef]
- Agarwal, R.; Hristova, S.; O’Regan, D. Stability concepts of Riemann-Liouville fractional-order delay nonlinear systems. Mathematics 2021, 9, 435. [Google Scholar] [CrossRef]
- Otrocol, D.; Ilea, V. Ulam stability for a delay differential equation. Cent. Eur. J. Math. 2013, 7, 1296–1303. [Google Scholar] [CrossRef]
- Tunç, C.; Biçer, E. Hyers-Ulam-Rassias stability for a first order functional differential equation. J. Math. Fund. Sci. 2015, 47, 143–153. [Google Scholar] [CrossRef]
- Konstantinov, M. Functional differential equations with iterated delay—A survey. IJPAM 2016, 109, 129–139. [Google Scholar] [CrossRef]
- Agarwal, R.P. Difference Equations and Inequalities: Theory, Methods, and Applications; CRC Press: Boca Raton, FL, USA, 2000. [Google Scholar] [CrossRef]
- Elaydi, S. An Introduction to Difference Equations; Springer: New York, NY, USA, 2005. [Google Scholar] [CrossRef]
- Hartman, P. Ordinary Differential Equations; SIAM: Philadelphia, PA, USA, 2002. [Google Scholar] [CrossRef]
- El-Sayed, A.; El-Mesiry, A.; El-Saka, A. On the fractional-order logistic equation. Appl. Math. Lett. 2007, 20, 817–823. [Google Scholar] [CrossRef]
- Hallam, T.; Clark, C. Non-autonomous logistic equations as models of populations in a deteriorating environment. J. Theor. Biol. 1981, 93, 303–311. [Google Scholar] [CrossRef]
- Lisena, B. Global attractivity in nonautonomous logistic equations with delay. Nonlinear Anal. Real World Appl. 2008, 9, 53–63. [Google Scholar] [CrossRef]
- El-Saka, H.; El-Sherbeny, D.; El-Sayed, A. Dynamic analysis of the fractional-order logistic equation with two different delays. Comput. Appl. Math. 2024, 43, 369. [Google Scholar] [CrossRef]
- Chauhan, J.; Jana, R.; Nieto, J.; Shah, P.; Shukla, A. Fractional Calculus Approach to Logistic Equation and its Application. In Fixed Point Theory and Fractional Calculus. Forum for Interdisciplinary Mathematics; Debnath, P., Srivastava, H.M., Kumam, P., Hazarika, B., Eds.; Springer: Singapore, 2022; pp. 261–274. [Google Scholar] [CrossRef]

Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Madamlieva, E.; Konstantinov, M. On the Existence and Uniqueness of Solutions for Neutral-Type Caputo Fractional Differential Equations with Iterated Delays: Hyers–Ulam–Mittag–Leffler Stability. Mathematics 2025, 13, 484. https://doi.org/10.3390/math13030484
Madamlieva E, Konstantinov M. On the Existence and Uniqueness of Solutions for Neutral-Type Caputo Fractional Differential Equations with Iterated Delays: Hyers–Ulam–Mittag–Leffler Stability. Mathematics. 2025; 13(3):484. https://doi.org/10.3390/math13030484
Chicago/Turabian StyleMadamlieva, Ekaterina, and Mihail Konstantinov. 2025. "On the Existence and Uniqueness of Solutions for Neutral-Type Caputo Fractional Differential Equations with Iterated Delays: Hyers–Ulam–Mittag–Leffler Stability" Mathematics 13, no. 3: 484. https://doi.org/10.3390/math13030484
APA StyleMadamlieva, E., & Konstantinov, M. (2025). On the Existence and Uniqueness of Solutions for Neutral-Type Caputo Fractional Differential Equations with Iterated Delays: Hyers–Ulam–Mittag–Leffler Stability. Mathematics, 13(3), 484. https://doi.org/10.3390/math13030484