Abstract
In this paper we present a detailed study of bonded knots and their related structures, integrating recent developments into a single framework. Bonded knots are classical knots endowed with embedded bonding arcs modeling physical or chemical bonds. We consider bonded knots in three categories (long, standard, and tight) according to the type of bonds, and in two categories, topological vertex and rigid vertex, according to the allowed isotopy moves, and we define invariants for each category. We then develop the theory of bonded braids, the algebraic counterpart of bonded knots. We define the bonded braid monoid, with its generators and relations, and formulate the analogues of the Alexander and Markov theorems for bonded braids in the form of L-equivalence for bonded braids. Next, we introduce enhanced bonded knots and braids, incorporating two types of bonds (attracting and repelling) corresponding to different interactions. We define the enhanced bonded braid group and show how the bonded braid monoid embeds into this group. These models capture the topology of chains with inter and intra-chain bonds and suggest new invariants for classifying biological macromolecules.
Keywords:
bonded links; long bonds; tight bonds; topological vertex equivalence; rigid vertex equivalence; unplugging; tangle insertion; bonded bracket polynomial; bonded braids; bonded braid monoid; enhanced bonds; bonded braid group; bonded L-moves; bonded Alexander theorem; bonded Markov theorem MSC:
57K10; 57K12; 20F36; 20F38
1. Introduction
In this paper, we develop the theory of bonded knots and bonded braids. For illustrations of these objects see Figure 1. These structures reflect different physical situations which can occur in applications, such as protein folding and molecular biology. We consider three types of bonds: long bonds which can be knotted or linked and are not local, standard bonds which are in the form of straight segments and do not cross between themselves, and tight bonds which occur locally and are nearly equivalent to graphical nodes in the mathematical formalism. We also discuss two kinds of isotopy for the three categories of bonded knots and links, long, standard, and tight, which reflect different physical assumptions about the flexibility of bonds: topological vertex isotopy, whereby the nodes of the bonds can move freely, and rigid vertex isotopy, whereby the nodes of the bonds move along with rigid 3-balls in which they are embedded.
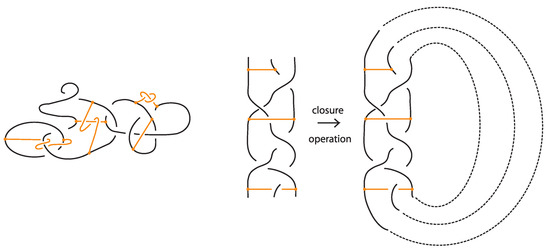
Figure 1.
On the left: a bonded link. On the right: a bonded braid and its closure.
Mathematically, a bond is an embedded arc whose endpoints lie on (distinct or possibly the same) components of the link diagram. It is a theme of this paper to compare long bonds, standard bonds, and tight bonds in the topological and rigid categories. We present the set of allowed moves for each category and highlight forbidden moves that distinguish bonded links from related concepts like tied links. We also recall and extend invariants for bonded knots: notably, the unplugging technique for the topological vertex category, the tangle insertion for the rigid vertex category, and a Kauffman bracket type polynomial (the bonded bracket) that is invariant under regular isotopy of rigid vertex bonded links. See [1,2].
Continuing this theme we introduce and study bonded braids as the algebraic counterpart of bonded links. We establish the bonded braid monoid, we point out its relation to the singular braid monoid [3], and we extend it to the bonded braid group. We further establish the interaction between oriented topological bonded links and bonded braids by means of a closure operation, a bonded braiding algorithm (bonded analogue of the classical Alexander theorem) and bonded L-move equivalences as bonded analogues of the classical Markov theorem. The classical Alexander and Markov theorems [4,5] relate knots and links to braids and the Artin braid groups, and translate their isotopy to an algebraic equivalence among braids. So, the algebraic structure of braids together with the two theorems above furnish the necessary basis for encoding knotted objects by words in braid generators and for the potential construction of knot invariants using algebraic tools. A great paradigm of this approach is the breakthrough work of V.F.R. Jones in the construction of the Jones polynomial (see [6] and references therein), the ambient isotopy equivalent to the Kauffman bracket polynomial. The L-move formulation [7] of the Markov theorem provides a geometric as well as algebraic approach to the classical braid equivalence.
Knotted structures in proteins and other biomolecules are now well documented, though only a small fraction of known proteins are knotted. While classical knot theory uses closed loops, knotoids and related braidoid formalisms allow one to study open curves without ad hoc closure. See [8,9] for the beginnings for knotoids and [10] for related braidoid formalisms. Knotoids have been applied to the topological analysis of proteins [11]. We recall these for context. Real biomolecules also possess intra-chain contacts—disulfide bridges, hydrogen bonds, salt bridges—that impose topological constraints (loops and lassos) even when the backbone is open. We refer the reader to [12,13,14,15] and references therein. To encode such interactions, bonded models have been adopted. The notion of bonded knotoid was introduced in [16] and applied to the study of proteins, and more recently bonded knots with distinguishable bonds were introduced in [17] for modeling different types of interactions. In these models, these bonds represent physical connections that are not part of the covalently linked backbone. For example, a disulfide bond in a protein can be modeled as a bond connecting two cysteine points on the chain [14,15]. See also [18]. The incorporation of bonds into knot diagrams gives rise to a rich extension of knot theory, with new moves and new invariants. A number of recent papers have studied invariants of bonded links and knotoids, with applications to protein structure classification, providing a novel way to distinguish different folding patterns of proteins; see for example [2,15,16,17,18].
In this paper we focus exclusively on bonded knots and bonded braids. Our motivation for exploring the diagrammatic settings and equivalences of bonded knots comes mainly from the remarkable applications so far and their interest as mathematical objects. Then, a new diagrammatic setting leads naturally to the fundamental questions about the existence of related braid structures. The algebraic structure of bonded braids can be used for encoding the objects that they model with words in the generators, after applying a braiding algorithm for turning them isotopically into closed bonded braids. Topological vertex isotopy translates into a bonded braid equivalence generated by moves between bonded braids. One can exploit algebraic tools for constructing topological invariants in order to distinguish our topological objects. The L-moves generating the classical braid equivalence are fundamental in that they provide an adaptive frame for formulating braid equivalences in other diagrammatic settings. For ensuring a sufficient set of moves for generating a braid equivalence one has to examine all algorithmic choices and moves in the diagrammatic setting, and finding all of them can be very subtle. See for example [7,19,20] for different diagrammatic settings. This is also the case here for pinning down the bonded L-moves, which augment the classical L-moves in generating the bonded braid equivalence. The definition and study of bonded braids and their relation to bonded links form the core of this work.
In regard to interdisciplinary connections, we note that the interaction lines in Feynman diagrams have the formal structure of bonds in our sense. Thus a Feynman diagram can be regarded as a bonded graph (possibly with a knotted embedding in three-space). In fact, just such ideas are behind Kreimer’s work in the book Knots and Feynman Diagrams [21] where the bonds in the Feynman diagrams undergo tangle insertion (in our sense) and are thereby associated with specific knots and links. Kreimer suggests that the topological types of these knots and links associated with the diagrams are significantly related to the physical evaluations of the diagrams.
In another direction, we note that current suggestions about knotted glueballs (closed loops of gluon flux related to the structure of protons) can be seen in our context as knotted structures consisting entirely of bonds. The strings of gluon field form highly attracting bonds between quarks in this model [22,23]. Finally, we point out that there is ongoing research in the interface of molecular biology and the construction of molecules with specified polyhedral shapes [24]. This research also involves bonds to which our modeling applies.
The paper is structured as follows. In Section 2, we develop the notion of long bonded links and we establish the allowed isotopy moves in both topological and rigid vertex categories. In Section 3, we introduce standard bonded links, namely, long bonded links with unknotted and unlinked bonds, and we establish that any long bonded link can be isotoped into standard form. We also give a full set of isotopy moves for standard bonded links in both topological and rigid vertex categories. We also identify some forbidden moves due to bonds. In Section 4, we introduce a stricter category of bonded links, called tight bonded links. Tight bonded links are standard bonded links whose bonds do not interact with link arcs. We also present a set of isotopy moves for this setting.
In Section 5, we construct invariants of long, standard, and tight bonded links via the unplugging operation for the topological category and the tangle insertion technique for the rigid vertex category. Furthermore, we extend the bracket polynomial for rigid tight bonded links. We note that all three categories of bonded links (long, standard, tight) and both isotopy types (topological and rigid vertex) extend naturally to bonded knotoids, providing a consistent framework at the level of open curves.
In Section 6, we turn to the algebraic counterpart of bonded links: bonded braids. We define bonded braids as braids with bonds connecting strands, and we introduce the bonded braid monoid on n strands, giving a complete presentation by generators and relations and two reduced ones. Moreover, we establish its isomorphism to the singular braid monoid. In Section 7, we prove an analogue of the Alexander theorem in the topological bonded setting: every topological bonded link can be obtained as the closure of a bonded braid.
In Section 8, we prove bonded braid equivalence theorems, showing that two bonded braids have topologically equivalent closures if and only if they are related by certain moves adapted to bonds and (tight) bonded braid isotopy. We begin with the adaptation of classical L-moves to (tight) bonded braids, which we further extend to the more subtle (tight) bonded L-moves. These moves provide a more fundamental understanding of how bonded isotopies translate into more algebraic moves analogous to the classical Markov theorem.
In Section 9, we introduce enhanced bonded links and braids. An enhanced bond comes in two types, representing, for example, an attractive vs. a repelling interaction. Mathematically, an attracting bond and a repelling bond may be thought of as mutual inverses. We show how allowing two bond types effectively turns the bonded braid monoid into a bonded braid group, and we define this enhanced bonded braid group with its extended generator set. The analogue of the Alexander theorem and the L-move approach to the Markov theorem are established for the enhanced setting as well.
We conclude with a discussion of further directions, including the further algebraic exploration of the bonded braid equivalences, the extension of the study to the plat closure of bonded braids, the formulation of a bonded Morse category and the extension of the braidoid–knotoid interaction to the bonded and enhanced bonded settings, which we plan to develop in future works.
2. Bonded Knots and Links
Knotted objects with bonds and their isotopy moves have been introduced for the first time in the context of bonded knotoids [16] and then as bonded knots with distinguishable bonds in [17]. In this section we consider bonded knots and links and their isotopy moves in full generality, in the sense that the bonds can be knotted and linked.
2.1. Definition of Bonded Knots and Links
An (oriented) link on c components is an embedding of c (oriented) circles in the three-sphere . For a link on a single component is a knot. Classical knots and links are considered up to isotopy of the ambient space , namely orientation-preserving homeomorphisms taking the one knot or link to the other. We usually study knots and links via their diagrams which are regular projections on the plane with over/under conventions at the double points, the crossings, and where isotopy is translated into planar isotopy (see left hand illustration of Figure 3) and the Reidemeister moves (see Figure 4).
Informally, a bonded link is a knot or link together with a set of auxiliary arcs (the bonds) connecting pairs of points on the knot or link, which can be thought of as connecting chords. By (bonded) “knots” or “links” we shall be referring invariably to both (bonded) knots and links. Formally, we have the following:
Definition 1.
A bonded link (or bonded knot, in case of a single component) is a pair , where L is a link in , and B is a set of k disjoint arcs properly embedded in the complement , such that each bond arc in B has its two endpoints, called nodes, attached on L. The nodes are attached transversely to L, with each node attaching at a distinct point on L. If , then is just a classical link. In this general setting, where bonds can be knotted and linked, they will be referred to as long bonds.
A bonded link diagram is a planar projection of a bonded link with the usual knot diagram over/under conventions at double points, the crossings, which may occur entirely between link arcs or bonded arcs, or may involve both a link arc and a bonded arc. A neighbourhood of a node, depicted as ⊢ or ⊣, shall be referred to as bonding site.
An oriented bonded link is obtained by assigning orientations to the link components of L (ignoring the bonds).
In figures we depict a bond as a slightly thick or colored arc (like orange); see the left hand illustration of Figure 2 for an example. So, a bond is an auxiliary structure that does not intersect L except at its endpoints, and it may connect two points on the same component of L or on different components. We may imagine L as a closed polymer chain (like a protein backbone) and the bonds are additional connections (like disulfide bridges or other interactions) that bind together parts of the chain.
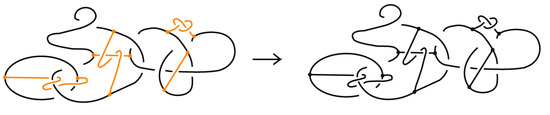
Figure 2.
On the left: a bonded link diagram, where the bonds (orange arcs) connect two points on the knot, with over/under-crossing information assigned at each bond crossing a link strand. On the right: the corresponding trivalent graph representation.
Remark 1.
Bonded knots/links can be viewed as special cases of embedded trivalent graphs [1], where there are two types of edges: ordinary edges and bonds (orange). Bonds always start and terminate at a classical edge and the nodes are the vertices.
2.2. Bonded Isotopy and Allowed Moves
Intuitively, two bonded links and in are equivalent if one can be continuously deformed into the other via an ambient isotopy of that carries L to and B to , i.e., an ambient isotopy that respects the bonds. However, in the theory of bonded links we distinguish two types of equivalence relations, which we call topological vertex isotopy and rigid vertex bonded isotopy.
Definition 2.
Two (oriented) bonded links and are equivalent as bonded links via topological vertex isotopy if there is an orientation-preserving homeomorphism taking to and to , such that f respects the attachment of bonds to link arcs (i.e., f carries each bond in to a bond in connecting a corresponding pair of points on ). In analogy, the (oriented) bonded links and are equivalent via rigid vertex isotopy if the nodes are considered to lie in local discs which are preserved by the isotopy. Bonded links subjected to topological vertex isotopy shall be called topological bonded links, while bonded links subjected to rigid vertex isotopy shall be called rigid bonded links.
We shall further define the notion of trivial bonded link, which in knot theory corresponds to the notion of unknot and unlinks.
Definition 3.
A bonded link is trivial as topological resp. rigid bonded link if it can be turned by topological vertex isotopy resp. rigid vertex isotopy into a planar graph.
It is easy to create examples of bonded knots which are trivial as topological but non-trivial as rigid bonded knots. Clearly, rigid vertex isotopy implies topological vertex isotopy. On the level of diagrams, this means that one can go from a diagram of to a diagram of by a finite sequence of planar isotopies and a set of local Reidemeister moves involving any types of arcs (link arcs or bonds or both) respecting or not rigid vertex isotopies. To see this, we adapt [1] (Theorem 2.1 and Section III) to the bonded link setting and we obtain the following:
Proposition 1.
Two (oriented) bonded links and are equivalent via topological vertex isotopy in if and only if any corresponding diagrams of theirs differ by a finite sequence of the following basic moves:
- i.
- Planar isotopies of link arcs, bonded arcs, or nodes, as shown in Figure 3.
 Figure 3. The planar isotopy moves.
Figure 3. The planar isotopy moves. - ii.
- Classical Reidemeister moves (R1, R2, R3) acting on link arcs away from nodes, as exemplified in Figure 4.
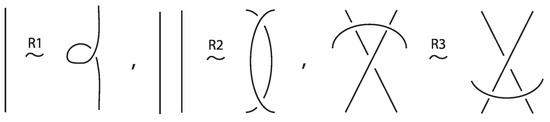 Figure 4. Reidemeister moves on link arcs.
Figure 4. Reidemeister moves on link arcs. - iii.
- Reidemeister-type moves acting only on bonded arcs, as shown in Figure 5.
 Figure 5. Reidemeister moves on bonded arcs.
Figure 5. Reidemeister moves on bonded arcs. - iv.
- Reidemeister-type moves involving both link arcs and bonded arcs, as exemplified in Figure 6.
 Figure 6. Reidemeister moves between link and bonded arcs.
Figure 6. Reidemeister moves between link and bonded arcs. - v.
- Vertex slide moves, allowing a bond endpoint to slide along the link to a new position, exemplified in Figure 7.
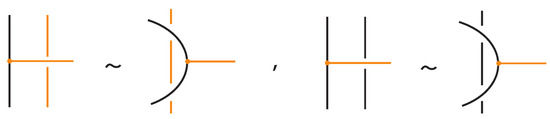 Figure 7. Vertex slide (VS) moves.
Figure 7. Vertex slide (VS) moves. - vi.
- Topological vertex twist moves (TVT), as exemplified in Figure 8.
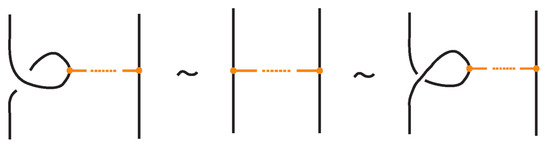 Figure 8. Topological vertex twists (TVT).
Figure 8. Topological vertex twists (TVT).
- Similarly, two (oriented) bonded links and are equivalent as bonded links via rigid vertex isotopy if corresponding diagrams of theirs differ by a finite sequence of the moves (i)–(v) above together with the rigid vertex twists (RVT) shown in Figure 9, excluding the TVT moves (Figure 8). Rigid vertex isotopy moves are illustrated in Figure 3, Figure 4, Figure 5, Figure 6, Figure 7 and Figure 9.
 Figure 9. Rigid vertex twists (RVT).
Figure 9. Rigid vertex twists (RVT).
We now present explicitly the moves listed in Proposition 1. Planar isotopy moves involving both link arcs and bonds are shown in Figure 3. Planar isotopy includes also sliding a node along its attaching arc.
We have all the classical Reidemeister moves (R1, R2, R3) acting on the link arcs of L (away from any nodes) (as in Figure 4 and their variants).
In addition, we have the moves R1, R2, R3 that only involve bonded arcs (as in Figure 5 and their variants).
We also allow Reidemeister moves between link and bonded arcs (see Figure 6).
Moreover, a bond can pass through an arc of the link or through another bond (or vice versa), analogous to the R2 move as illustrated in Figure 7. We call these moves vertex slide moves.
In the topological vertex isotopy, we allow moves analogous to the classical R1 moves involving link arcs and bonds as illustrated in Figure 8. We call these moves topological vertex twists (TVT).
Finally, Figure 9 illustrates the rigid vertex twists (RVT) moves, which replace the TVT moves in the rigid vertex isotopy setting, obtaining thus a stricter diagrammatic equivalence relation.
Proof of Proposition 1.

This is an adaptation of [1] (Theorem 2.1) to the case of trivalent topological graphs in the particular form of bonded links. The only differences are as follows. Kauffman’s original statement of the basic moves of topological vertex isotopy on embedded graphs includes the following moves (adapted to the bonded category) in place of TVT and VS, see Figure 10:
Figure 10.
A mixed topological vertex twist, mTVT, and the bonded slide moves, BS.
These moves, however, follow easily from the moves in Figure 4, Figure 7, and Figure 8, as explicitly demonstrated in Figure 11 and Figure 12.
Figure 11.
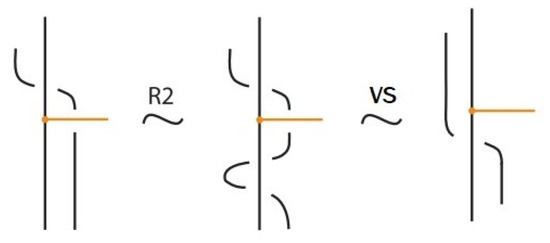
A bonded slide move follows from the R2 and VS moves. So it is valid in the topological and rigid vertex isotopy.
Figure 12.
An mTVT follows from the VS, R1 and the TVT moves. So it is valid (only) in the topological vertex isotopy.
The case of rigid vertex isotopy for bonded links is an adaptation of [1] (Section III) to the case of trivalent rigid vertex graphs in the particular form of bonded links and follows analogously. Hence the proof is complete. □
2.3. More Diagrammatic Moves for Bonded Links
We now present additional local diagrammatic moves in the setting of topological bonded links, and show that they all follow from the list of basic moves stated in Proposition 1 and exemplified in Figure 3, Figure 4, Figure 5, Figure 6, Figure 7 and Figure 8.
These additional moves fall into two main categories:
- Moves involving the interaction of a bonded arc with a link arc or another bond,
- Moves involving the interaction of a bonded arc with a crossing.
We analyze these cases below.
Bond–link arc interaction. When a bonded arc interacts with a link arc to which it is attached, we have the so-called min/max sliding moves (see Figure 13). These moves involve sliding a bonded arc along a link arc to which it is attached, creating or removing a crossing between the bond and the link arc. In Figure 13 we show that these moves follow from the basic topological moves listed in Proposition 1.

Figure 13.
The min/max sliding moves.
In addition to the min/max sliding moves, we also have the arc slide moves. An arc can also slide across a bond: entirely within the region between the nodes (internal arc slide) (see Figure 14), outside the region (external arc slide) (see Figure 15), or partially within (bonded slide) (see Figure 11).
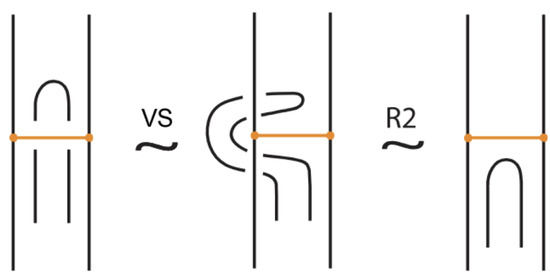
Figure 14.
An internal arc slide move expressed in terms of the basic moves.
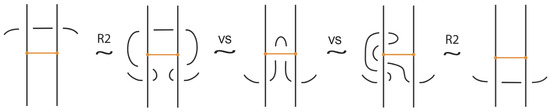
Figure 15.
An external arc slide move expressed in terms of the basic moves.
Bond–crossing interaction. Next, we consider moves involving the interaction of a bond with a crossing. Three scenarios arise: (i) both arcs of the crossing lie within the region of a bond, (ii) one arc provides a bonding site, (iii) both arcs provide a bonding site. The first two comprise the crossing slide moves (Figure 16 and Figure 17); the latter gives rise to the bonded flype and bonded double flype moves (Figure 18 and Figure 19). In Figure 16, Figure 17, Figure 18 and Figure 19 we show that these moves follow from the basic topological moves listed in Proposition 1.

Figure 16.
The interior crossing slide moves follow from the basic topological moves.
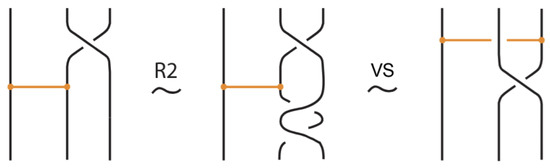
Figure 17.
A crossing slide move expressed in terms of the basic moves.

Figure 18.
The bonded flype move follows from the bond rotation and the crossing slide move.
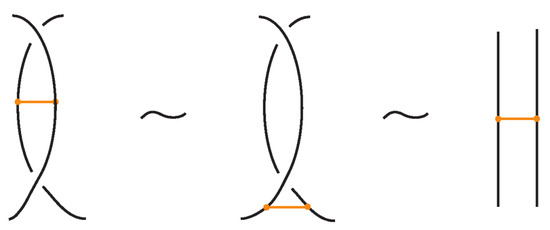
Figure 19.
The bonded double flype move follows from the bonded flype and an R2 move.
The bonded flype move follows from the TVT move (manifested as bond rotation, that is, mTVT moves) and crossing slide moves, as demonstrated in Figure 18. The bonded double flype move is obtained by combining a bonded flype with an R2 move. The bonded double flype move, so also the bonded flype move, follows easily also in the rigid vertex isotopy by the basic moves.
2.4. Some Restrictions and Forbidden Moves
There are some important restrictions (forbidden moves) in bonded link theory that do not appear in classical knot theory. Notably, because bonds are embedded arcs, one cannot slide a bond around a strand in such a way that the bond passes through two consecutive crossings of different type (over then under, or vice versa). In effect, a bond cannot be pulled through a zig-zag in the link that would cause its endpoint to swap the side of the link it is on. Such a move would entail the bond endpoint going through a crossing, which in the topological model is not allowed unless it follows the allowed moves described above. Figure 20 illustrates these forbidden moves.
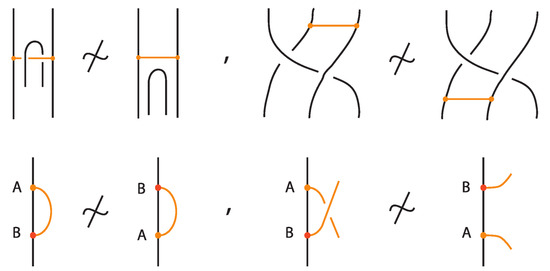
Figure 20.
Some forbidden moves in the theory of bonded links.
Another related diagrammatic setting is the theory of tied links [25,26], links equipped with ties. A tie is a non-embedded simple arc connecting different points of a link, whose ends can slide along the arcs they are attached but remain on the link. Ties are like phantom bonds: they can pass freely through one another and through the arcs of the link. Two ties can even merge into one if they connect the same arcs. Bonded links differ crucially: bonds are embedded arcs and cannot be created or destroyed by isotopy, nor can they pass through link arcs or through themselves arbitrarily.
3. Standard Bonded Links
Given a bonded link diagram, it is possible to simplify the diagram by applying isotopy moves so that the bonds themselves become unknotted and are presented in a “standard” form. Knotted objects with bonds in standard form and their isotopy moves have been first introduced in the theory of bonded knotoids [16] and later as bonded knots with distinguishable bonds in [17].
Recall that in a bonded link diagram, bonds may initially be knotted or entangled on their own, forming non-trivial configurations in space. However, by performing appropriate isotopies, one can eliminate such knotting in the bonds and arrange them in a simple configuration where each bond is unknotted. In particular, it is useful to isotope the diagram so that each bond connects two link segments in a simple H-shaped configuration. See Figure 21 for an example. Consider a small neighborhood around each node on the link: the diagram can be isotoped so that near each bond endpoint, the link segment appears roughly vertical, and the bond itself attaches like a horizontal rung, together forming a shape reminiscent of the letter “H”, with the bond as the horizontal bar and the link segments as the vertical bars. We refer to such a local configuration as an H-neighborhood of a bond (see Figure 22).
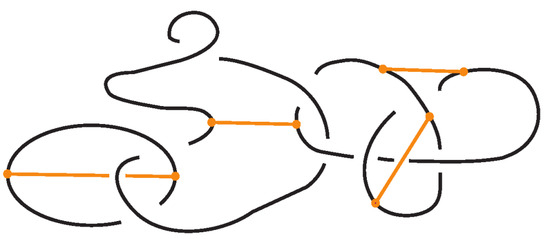
Figure 21.
A standard bonded link.
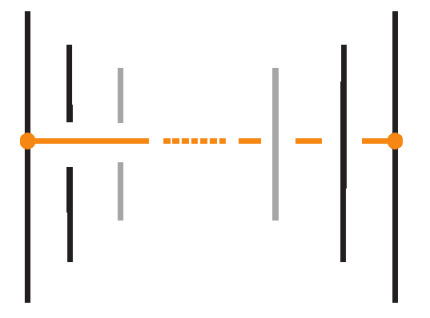
Figure 22.
An H-neighborhood of a bond in standard form. The bond (horizontal) connects two link arcs.
Definition 4.
A standard bonded link diagram is a bonded link diagram that contains no crossings or self-crossings of bonded arcs.
We now show that any bonded link diagram can be transformed into a standard form by a sequence of bonded isotopy moves:
Proposition 2.
A (topological or rigid) bonded link diagram can be transformed isotopically into a standard bonded link diagram.
Proof.
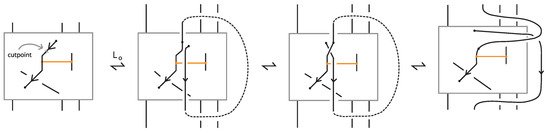
Consider a bond that is not in standard form, and let and denote its two nodes. Let D be a disc containing only and the three arcs emanating from it, one belonging to the bond and the other two to the link. Using the vertex slide moves (recall Figure 7), we can slide D along the bond toward , progressively eliminating any self-crossings of bonded arcs. During this process, new crossings may appear, but only between link arcs, and never between arcs of the bonds themselves (see Figure 23). The procedure is then completed by induction on the number of bonds initially not in the standard form, successively applying this process to each bond until all are brought into the standard form. □
Figure 23.
An example of bond contraction.
Proposition 3.
Given a long bond between two nodes, as exemplified in Figure 23, we can keep one node fixed and contract the bond into a neighborhood of that node. This gives rise to two contractions, one for each node. Call these contracted diagrams and . Then and are topologically isotopic or rigid vertex isotopic (depending on context) as standard bonded diagrams.
Proof.
Indeed, the long arc of the original bond provides a track along which to move the contracted bond from the one side to the other, as shown in Figure 23. □
We now state the following theorem describing topological and rigid equivalence diagrammatically for standard bonded links.
Theorem 1.
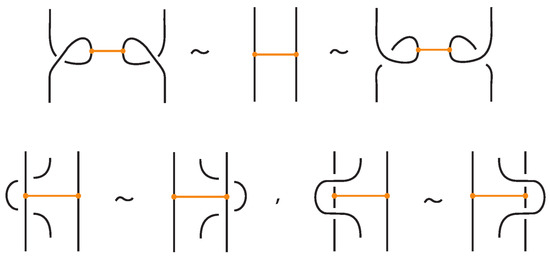
Two (oriented) standard bonded links are topologically isotopic if and only if any corresponding diagrams of theirs differ by a finite sequence of the moves illustrated in Figure 3, Figure 4 and Figure 24 with all variants.
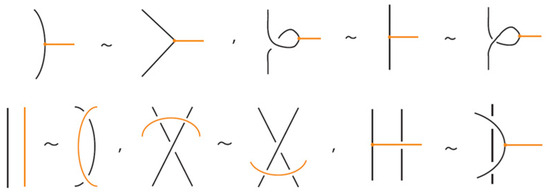
Figure 24.
Topological isotopy moves between standard bonded links.
Similarly, two (oriented) standard bonded links are rigid vertex isotopic if and only if any corresponding diagrams of theirs differ by a finite sequence of the moves illustrated in Figure 3, Figure 4 and Figure 25 with all variants.
Figure 25.
Rigid vertex isotopy moves between standard bonded links.
4. Tight Bonded Links
We now consider a stricter category of bonded links, called tight bonded links. While standard bonded links allow bonds to cross over or under link strands (provided the bonds themselves remain unknotted), tight bonded links forbid such crossings entirely. See Figure 26 for an example. In a tight bonded link, each bond sits in an H-neighborhood that is free of arcs, as illustrated in Figure 27. We have the following definition (compare with [16,17]):
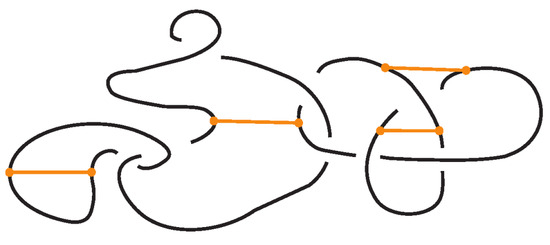
Figure 26.
A tight bonded link.
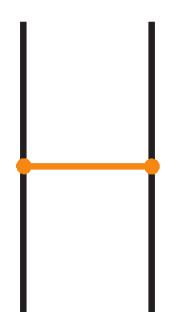
Figure 27.
The H-neighborhood of a tight bond.
Definition 5.
A tight bonded link diagram is a bonded link diagram in which each bond is presented in standard form and, additionally, no bond crosses any link arc.
Proposition 4.
A standard bonded link diagram can be transformed isotopically (topologically and rigidly) into a tight bonded link.
Proof.

Starting from a standard bonded link diagram, we apply the isotopy illustrated in Figure 28 to each bond individually. This isotopy removes any crossings between the bond and the link in the region between its two nodes, while preserving the standard H-neighborhood configuration of the bond. Repeating this process for all bonds in the diagram yields a tight bonded link diagram. □
Figure 28.
A standard bond can be brought to tight form by vertex slide moves.
We now state the following theorem describing topological and rigid equivalence in the tight category through diagrammatic moves.
Theorem 2.
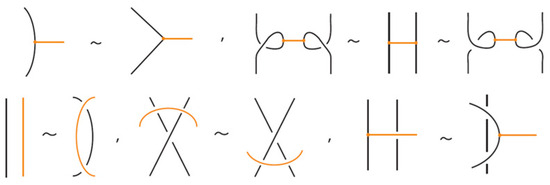
Two (oriented) tight bonded links are topological vertex isotopic in the tight category if and only if any corresponding diagrams of theirs differ by a finite sequence of planar isotopies and the Reidemeister moves for the link arcs (recall Figure 3, Figure 4), and the moves illustrated in Figure 29. Similarly, two (oriented) tight bonded links are rigid vertex isotopic in the tight category if and only if any corresponding diagrams of theirs differ by a finite sequence of planar isotopies and the Reidemeister moves for the link arcs, and the moves illustrated in Figure 30.
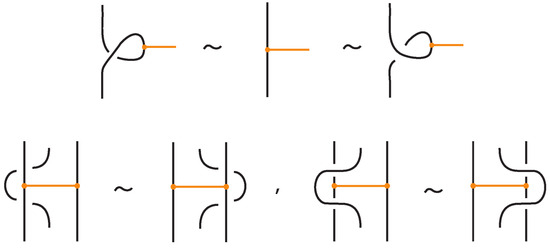
Figure 29.
Basic topological isotopy moves between tight bonded links.
Figure 30.
Basic rigid vertex isotopy moves between tight bonded links.
5. Invariants of Topological and Rigid Vertex Bonded Links
In this section we briefly describe two general techniques for obtaining invariants for bonded links, corresponding to the two types of isotopy—topological vertex isotopy and rigid vertex isotopy—which are both due to Kauffman, adapted to the category of bonded links. We further construct the bonded bracket polynomial.
5.1. Topological Bonded Links: Unplugging Operations
For a bonded link , we view the link together with the bonds as a trivalent embedded graph. At each node (vertex) where a bond attaches, we may perform an unplugging operation: removing one of the edges incident to the vertex, as shown in the top row of Figure 32. At a 3-valent vertex there are three such choices. This yields a collection of unknotted (redundant) arcs and classical links corresponding to the various choices of unpluggings. A classical result due to Kauffman [1] asserts, in the language of bonded links:
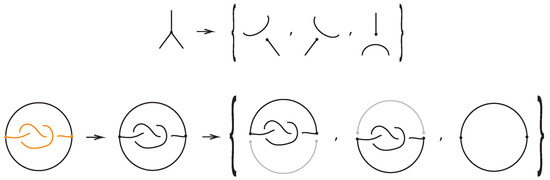
Figure 32.
Unplugging edges from an embedded graph.
Theorem 3.
Let be a bonded link. Then, considering the bonds and the link arcs as graph edges invariantly, we obtain the following:
- The set of classical links derived from all possible vertex unpluggings is a topological vertex isotopy invariant of .
- Consequently, any ambient isotopy invariant applied to is also a topological vertex isotopy invariant of .
Figure 32 bottom row shows the set of three knots derived by the unplugging of the given bonded knot, seen as an embedded graph.
We note that we can create finer unplugging invariants for bonded links by restricting unplugging in relation to the bonds. There are two types, the bonded unplugging and the strict unplugging, which are complementary:
Definition 6.
The bonded unplugging of a bonded link is the unplugging where we unplug only the bonds, so we are left with the underlying link K.
It now follows immediately from Theorem 3 that the following is true:
Proposition 5.
The underlying link K of a bonded link is a topological vertex isotopy invariant of .
The bonded unplugging can distinguish bonded knots. In Figure 33 the bonded unplugging yields an unknot in the one case and a trefoil knot in the other case. Hence the two bonded knots are distinguished. In this example with the knotted bond, we have an embedding of a -graph. This knotted graph is the Turaev closure of the knotoid depicted by the knotted bond as a diagram in the surface of the 2-dimensional sphere. The fact that we have proved that the -graph has a non-trivial embedding implies that this knotoid is non-trivial.
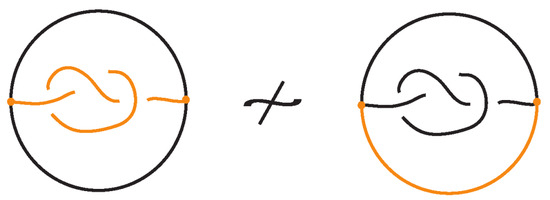
Figure 33.
The bonded unplugging distinguishes the two bonded knots.
Definition 7.
The strict unplugging of a bonded link is the unplugging where at a given node only the arcs from the link are allowed to be unplugged.
At a three-valent vertex there are two such choices. This also follows immediately from Theorem 3:
Proposition 6.
The resulting collection of knots and links (ignoring the unknotted arcs) from the strict unplugging of a bonded link is a topological vertex isotopy invariant of the bonded link.
Figure 34 illustrates an example of a bonded knot G, which is trivialized by the bonded unplugging. However, via the strict unplugging, we obtain an unknot and a trefoil knot. This proves that the given bonded knot is non-trivial and that the -graph where one considers the bond as another edge is non-trivial. Let further be the same graph where now the upper arc in G is a bond (see left illustration in Figure 34). If we perform bonded unplugging to we obtain a trefoil knot; therefore, is not isotopic to G.
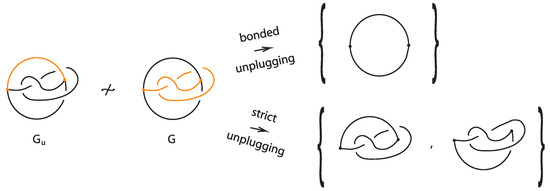
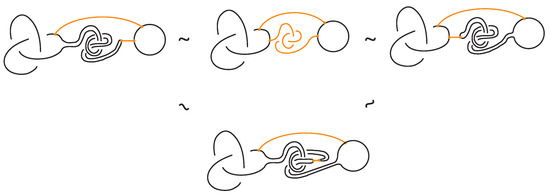
Figure 34.
Unplugging edges from an embedded graph.
In the case of where the bond is the lower arc of G, the unplugging invariants do not distinguish and G. In fact, and G are isotopic as demonstrated in Figure 35.
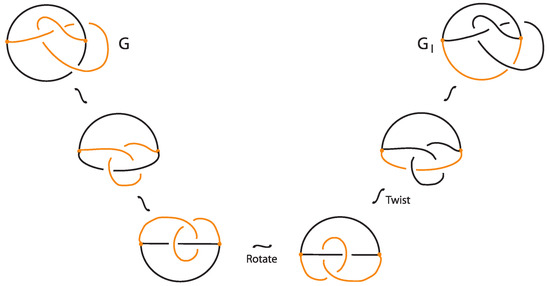
Figure 35.
Two isotopic bonded knots.
5.2. Rigid Standard Bonded Links: Tangle Insertions
Given a standard bonded link , one may replace each bond by a properly embedded band. Then, at each band we insert any classical two-tangle. This process is illustrated in Figure 36. The resulting set of classical links for all possible choices of inserted two-tangles, depends only on the rigid vertex isotopy class of .
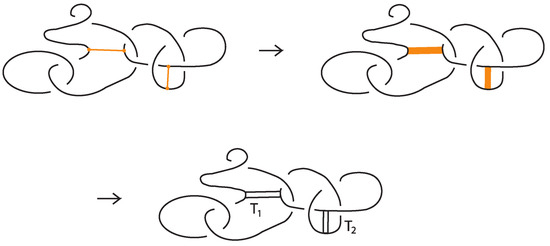
Figure 36.
Band replacements and tangle insertions.
More precisely, given a rigid standard bonded link diagram , we proceed as follows:
- Replace each bond by a properly embedded band connecting its two nodes.
- Into each band, insert a properly embedded two-tangle chosen from a fixed family of tangles.
- The result is a classical link diagram whose isotopy class depends only on the rigid isotopy class of and the choice of tangles.
We now state the following result about tangle insertion, also due to Kauffman [1] but adapted to the setting of rigid bonded links. Originally the tangle insertion would take place in the disc of a rigid vertex. Here the rigid vertex is replaced by a bond. The earliest example of tangle insertion is the replacement of a singular crossing by classical crossings in the theory of Vassiliev invariants.
Theorem 4.
Let be a standard bonded link. Replace the bonds with properly embedded discs in the form of bands. Then, the following is true:
- The set of classical links obtained from all possible tangle insertions is a rigid vertex isotopy (resp. rigid vertex regular isotopy) invariant of .
- For any fixed choice of tangles, the ambient (resp. regular) isotopy class of the resulting classical link is a rigid vertex (resp. rigid vertex regular) isotopy invariant of .
Remark 3.
Evaluating the resulting classical link diagram using any ambient or regular isotopy invariant (such as the Jones polynomial, the HOMFLY polynomial, the bracket polynomial, etc.) yields an invariant of the original rigid tight bonded link. Since the choice of tangles is arbitrary, and the choice of classical invariants is also arbitrary, this method generates infinitely many distinct invariants of rigid bonded links. In practice, one typically fixes a family of tangles and a preferred classical invariant to construct an invariant adapted to the application at hand.
Remark 4.
The tangle insertion technique is specific to the rigid vertex category, since in the topological category the nodes are allowed to rotate, making the inserted tangles ill-defined under isotopy. Thus, tangle insertion is a natural tool for studying rigid bonded links.
5.3. Rigid Tight Bonded Links: The Bonded Bracket Polynomial
In this subsection we present the bonded bracket polynomial, which extends the Kauffman bracket polynomial to rigid tight bonded links by assigning specific skein-theoretic relations at bonds. This invariant arises by choosing a particular two-tangle insertion at each bond, corresponding to a fixed linear combination of possible two-tangle states, weighted by formal coefficients. The resulting classical diagram (obtained after resolving all bonds via this prescribed two-tangle insertion) is then evaluated using the usual Kauffman bracket polynomial.
We emphasize that the construction described below uses one specific choice of a two-tangle insertion at each bond. In principle, different choices of two-tangle insertions give rise to different invariants. Indeed, one can think of this invariant as a representative example of a much broader class of invariants defined by varying the two-tangle substitutions at bonds. Exploring how powerful this family of invariants is remains an open problem.
Definition 8.
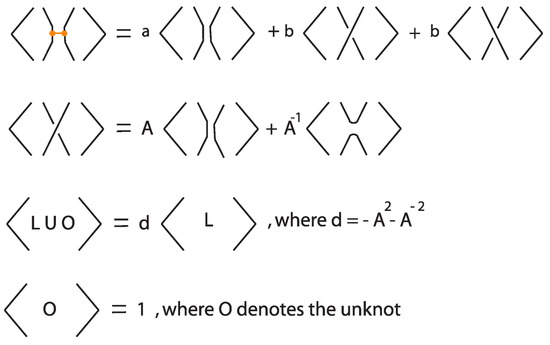
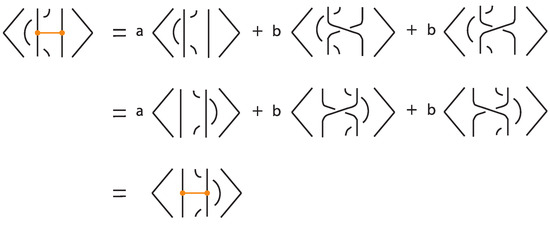
Let L be a tight bonded link diagram. The bonded bracket polynomial of L, denoted , is defined inductively via the skein relations illustrated in Figure 37, where a and b are formal coefficients.
Figure 37.
Skein relations defining the bonded bracket polynomial.
We now show that this polynomial is invariant under regular isotopy (excluding move R1) for tight rigid bonded links.
Proposition 7.
The bonded bracket polynomial is an invariant of regular isotopy in the category of tight rigid bonded links.
Proof.
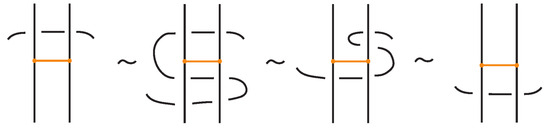
In the absence of bonds, the bonded bracket polynomial coincides with the classical Kauffman bracket polynomial, and thus is invariant under the classical Reidemeister moves R2 and R3. For the moves involving bonds, invariance under the local moves analogous to R2 at the nodes is verified directly using the skein relations, as illustrated in Figure 38.
Figure 38.
Invariance under a vertex slide move.
For justifying rigid vertex isotopy invariance, we argue as follows. The bonded skein relation replaces each bond by a trivial two-tangle or a positive or a negative type of crossing. In the end we obtain a set of link diagrams for k bonds. According to Theorem 4, this set of links and each one separately is a rigid vertex isotopy (resp. regular rigid vertex isotopy) invariant of the original tight bonded link diagram L. Therefore, applying the Kauffman bracket polynomial to each one will retain the regular rigid vertex isotopy invariance. □
To illustrate the bonded bracket polynomial, we explicitly compute it for three examples where, for simplicity, we set .
Example 1.
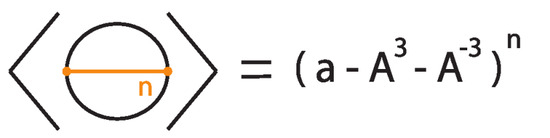
Consider the unknot equipped with n bonds, denoted .
Then
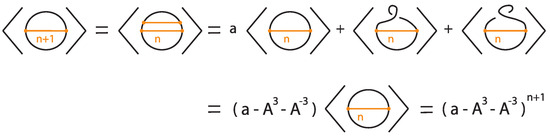
The proof follows by induction, as illustrated in Figure 39 and Figure 40, taking into account that the addition of a local curl to a bonded diagram by an R1 move multiplies the bracket polynomial of the diagram by a factor of if the curl is right-handed and if the curl is left-handed.
Figure 39.
The unknot with n bonds, denoted .
Figure 40.
Induction step for computing .
Example 2.
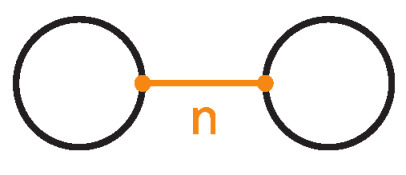
Let denote the two–component unlink with n bonds between the components (Figure 41).
Figure 41.
The 2-component unlink with n-bonds between the two components, denoted .
Then we have the following:
where .
We prove relations (1) by induction on . For we have that:
Hence, . Assume that relations (1) hold for n. Then, for we have:
Example 3.
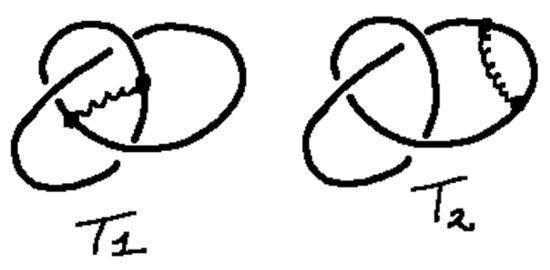
In this example in Figure 42, we consider two versions of bonded trefoil knots and . In the figure the bonds are represented by curly black arcs.
Figure 42.
Two bonded trefoils.
By expanding the crossings in these examples via the Kauffman bracket identity, we find that
and
Here we use and . One can then see that and are sufficiently different to verify that and are distinct rigid vertex bonded knots. In fact, we specifically calculate that
and that
This shows explicitly that the two bonded knots are not rigid vertex isotopic.
We note that the highest power of a appearing among all monomials in the expansion of the bonded bracket polynomial of a bonded link diagram equals the total number of bonds. Finally, we note that invariants defined for standard bonded links extend to tight bonded links, and, in some cases, they become simpler to compute due to the absence of crossings between bonds and link arcs.
6. Bonded Braids
In this section we develop the theory of bonded braids, an algebraic framework that extends classical braids by including bonds. Note that we restrict our attention to the standard and tight categories of bonded links, undergoing topological vertex isotopy. Combined with the braiding result of the next section, this algebraic structure could be used in encoding the topological structures of bonded links and of objects that they model.
We recall that a geometric braid on n strands is a homeomorphic image of n arcs in the interior of , , such that it is monotonous, that is, there are no local maxima or minima, and the boundary of the image consists in n numbered points in and n corresponding numbered points in . We study braids through their diagrams in the plane , which are also called braids. Formally, a braid is described by its braid word in the braid group , which has generators and relations:
The relationship between knots and braids is established through the Alexander theorem [4], which states that every oriented knot or link can be represented isotopically as the closure of some braid. The (standard) closure of a geometric braid comprises in joining with simple arcs the corresponding endpoints, and it gives rise to an oriented knot or link. Figure 43 illustrates an example of a braid on the left and its closure on the right. The braid on the left is represented by the braid word , where the generators and their inverses correspond to single crossings of adjacent strands.
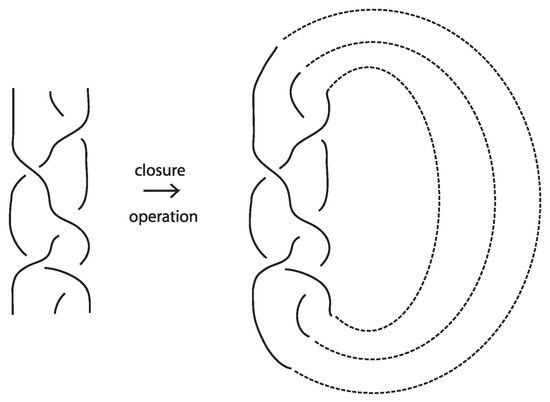
Figure 43.
A braid and its closure.
6.1. Bonded Braid Definition
In this subsection, we introduce the notion of bonded braids, which are classical braids equipped with bonds. Bonded braids extend the classical braid framework and provide an algebraic structure for studying bonded links. To establish this correspondence, we define bonded braid isotopy, which preserves the bond structure under standard braid moves. Using this framework, we prove an analogue of the Alexander theorem for bonded links.
We begin with the formal definition of bonded braids and their isotopy before presenting the braiding algorithm and proof of the Alexander theorem.
Definition 9.
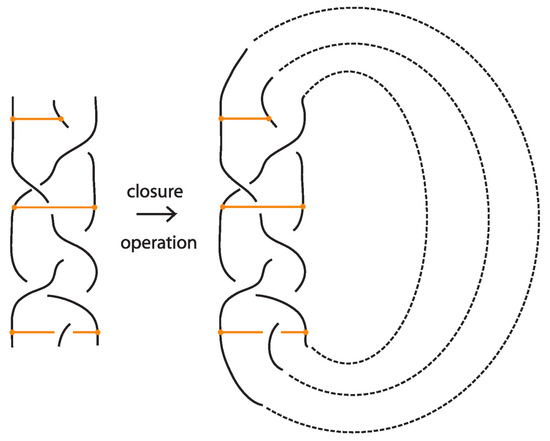
A bonded braid on n strands is a pair of a classical braid β on n strands, and a set of k disjoint, embedded horizontal simple arcs, called bonds. The boundary points of a bond, called nodes, cannot coincide with endpoints of the braid or with other nodes, and they have local neighborhoods that are three-valent graphs with the attaching arcs, like ⊢, forming together an H-neighborhood, as depicted in Figure 22. A bond joining the and strands with is denoted and it threads transversely through the strands in between. By abuse of notation, we denote by a bond joining the and strands with any sequence of overpasses or underpasses. A bond joining two consecutive strands i and shall be called elementary bond, and will be denoted by . If , then is just a classical braid. Moreover, a bonded braid diagram (also referred to as bonded braid) is a regular projection of a bonded braid in the plane with over/under information at every crossing, and such that no crossing is horizontally aligned with a bond. So, can be encoded unambiguously by a sequence of o’s and u’s indicating the types of crossings formed between the bond and any strand in between. For an example, see left-hand side illustration of Figure 44. A configuration of a bond which passes either over or under all its intermediate strands, such that all crossings are marked ‘over’/‘under’, is a uniform over/under.
Figure 44.
A bonded braid and its closure.
The standard closure operation for bonded braids gives rise to bonded links (see Figure 44).
6.2. Bonded Braid Isotopy
To define bonded braid isotopy, we extend the classical braid isotopy by introducing additional moves that account for the presence of bonds. These moves reflect the topological nature of bonds and their interactions with each other and with crossings and other strands in the braid. The first such move is bonded planar isotopy, induced by the bonded braided Δ-moves illustrated in Figure 45, where the downward orientation of the strands is preserved.
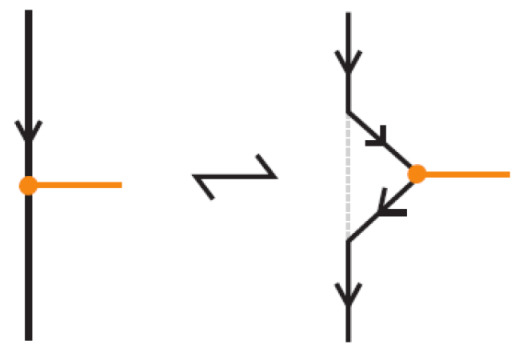
Figure 45.
A bonded braid planar isotopy move.
The interaction between two bonds depends on their relative positions and the sequence of crossings they form with the strands in between. More precisely:
- If two bonds and are sufficiently far apart so that their threading paths do not overlap or interact, that is , they commute freely. For an example see Figure 46.
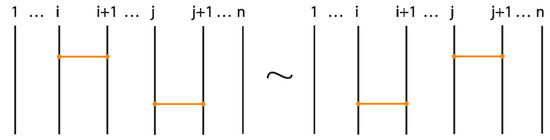 Figure 46. Interactions between two distant bonds.
Figure 46. Interactions between two distant bonds. - Two bonds and also commute if and is a uniform over/under, that is, it passes either over or under all its intermediate strands, which include the set of intermediate strands of . In this case, the configuration of the sequence of u’s and o’s of the bond does not matter. For an example, see Figure 47.
 Figure 47. Interactions between two bonds: uniform over configurations.
Figure 47. Interactions between two bonds: uniform over configurations. - Furthermore, the two bonds and commute if , the sequence of crossings of coincides with a subsequence of the sequence of crossings of for the strands and the markings in the bigger sequence before and after the subsequence agree, i.e., they are both ‘over’ or both ‘under’. For example, if forms the sequence with its intermediate strands, the bond must contain either the subsequence or the subsequence for the bonds to commute. We call this configuration the matching crossing sequences. For an illustration see Figure 48.
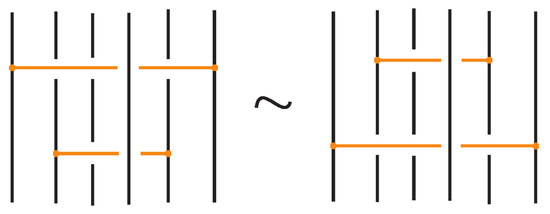 Figure 48. Interactions between two bonds: matching crossing sequences.
Figure 48. Interactions between two bonds: matching crossing sequences.
Any interaction between a bond and an arc is a result of the braided vertex slide moves exemplified in Figure 49.

Figure 49.
Braided vertex slide moves.
An interaction between a bond and a crossing depends on the relative positions of the bond and the strands forming the crossing. More precisely,
- If the strands forming the crossing do not interact with the bond , i.e., or , then the bond and the crossing commute freely (see Figure 50 for an example).
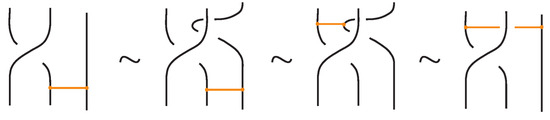
- If the nodes of the bond lie on two strands that form a crossing, the bond and the crossing commute, i.e., commutes with (see Figure 51). This is the bonded flype move.
- A bond and a crossing commute if the bond passes entirely over or entirely under both strands that form the crossing. We call this configuration, the uniform position of the bond. For an illustration of this case, see the left-hand side of Figure 52.
- A bond and a crossing also commute if the over-strand of the crossing lies above the bond and the under-strand lies below it. In this case, the bond effectively ‘threads through’ the crossing without disrupting its configuration. We refer to this move as the bonded R3 move. For an illustration of this case, see the right-hand side of Figure 52.

Figure 50.
A crossing commuting with a bond.
Figure 50.
A crossing commuting with a bond.


Figure 51.
A crossing between strands that contain the nodes of a bond.
Figure 51.
A crossing between strands that contain the nodes of a bond.


Figure 52.
A bond passing over a crossing and a bonded R3 move.
Figure 52.
A bond passing over a crossing and a bonded R3 move.


Figure 53.
Interactions between a crossing and a bond with one node on a strand of the crossing.
Figure 53.
Interactions between a crossing and a bond with one node on a strand of the crossing.


Figure 54.
A braid strand passing over a bond.
Figure 54.
A braid strand passing over a bond.

Lemma 1.
A move between a crossing and a bond with one node on a strand of the crossing follows from a move where a braid strand passes over or under a bond, together with the other moves, and vice versa.
Proof.
The proof of the Lemma is adequately described in Figure 55. □
Figure 55.
The proof of Lemma 1.
Finally, in Figure 56, we illustrate some examples of configurations that are not allowed under bonded braid equivalence.
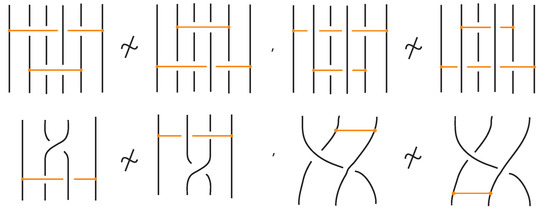
Figure 56.
Examples of moves that are not allowed in bonded braid equivalence. These configurations violate the topological constraints of the bonded braid model.
The additional moves depicted in Figure 47, Figure 48 and Figure 52 are essential to define bonded braid equivalence. These moves account for the interactions specific to bonds, ensuring that the topological properties of the bonded braid are preserved. Using these moves, we extend classical braid isotopy to include bonded braid isotopy, leading to the following formal definition.
Definition 10.
Two bonded braids are isotopic if and only if they differ by classical braid isotopy that takes place away from the bonds, together with moves depicted in Figure 47, Figure 48, Figure 49, Figure 50, Figure 51 and Figure 52. An equivalence class of isotopic bonded braid diagrams is called a bonded braid.
6.3. The Bonded Braid Monoid
Let now be the set of bonded braids on n-strands. In we define as operation the usual concatenation of classical braids. Then, the set of bonded braids forms a monoid, called the bonded braid monoid. We denote by any bond whose nodes lie on the and strand of the braid, and by we denote the bond whose nodes lie on the and strands, which we shall call elementary bond, in contrast to the long bonds for . We are now ready to give a presentation of .
Theorem 5.
The set of bonded braids on n strands forms a monoid under braid concatenation. The bonded braid monoid has a presentation with generators:
subject to the following relations:
Proof.
The proof of the Theorem is an immediate consequence of the exhaustive listing above of all possible interactions of bonds among themselves as well as with other arcs or crossings in the bonded braid. □
We further have the following:
Lemma 2.
A standard bond is a word of the classical braid generators and an elementary bond.
Proof.
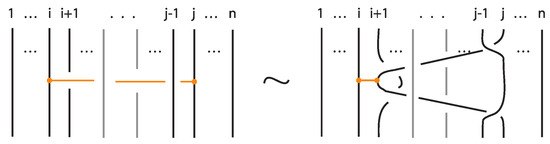
Figure 57 illustrates a bonded braid isotopy for contracting the bond or equivalently for pulling to the side strands crossing over or under the bond, using braided vertex slide moves (recall Figure 49). □
Figure 57.
The bond expressed as a combination of classical braid generators and an elementary bond.
Using now Lemma 2 and standard Tietze transformations on the presentation of of Theorem 5, one can obtain a reduced presentation for that uses only the classical braid generators and the elementary bonds . Namely, we have the following:
Theorem 6.
The bonded braid monoid, , on n strands admits the following reduced presentation: it is generated by the classical braid generators and their inverses and the elementary bonds , subject to the relations:
When considering with its reduced presentation, we shall refer to it as the tight bonded braid monoid.
We now observe that the algebraic structure of the bonded braid monoid is closely related to the well-studied singular braid monoid [3,27]. In particular, one can interpret each bond between two strands as a kind of singular crossing, where the two arcs are tangential instead of forming a crossing, as illustrated in Figure 58.
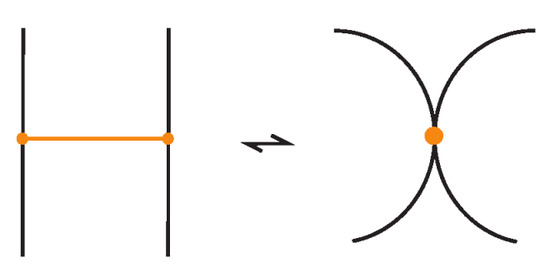
Figure 58.
Bonds as singular crossings.
For reference, the singular braid monoid is generated by the usual braid generators together with singular crossing generators , subject to the following relations:
Comparing the above presentation of with the reduced presentation of in Theorem 6 leads to the following result:
Theorem 7.
The bonded braid monoid is isomorphic to the singular braid monoid .
Proof.
By identifying each bond generator with the singular crossing generator as illustrated in Figure 58, we see that the defining relations of coincide with those of . Hence, the assignment and extends to a monoid isomorphism . □
The above leads also to the following remark:
Remark 5.
A singular knot or braid can be realized geometrically with tangential singularities in place of singular crossings, giving rise to a new theory. Regarding the singularities as tangentialities of lines, one can analyze the dynamics of the birth and death of such interactions in a generalization of the present work.
Remark 6.
We observe that the first two relations in Theorem 6 are the relations of the classical braid group . So we have that the classical braid group injects in the tight bonded braid monoid . This follows from Theorem 7 and from the analogous result about the singular braid monoid . In general, by virtue of Theorem 7, any result on the singular braid monoid transfers intact to the tight bonded braid monoid . And vice versa, like Theorem 8 that follows, which is also valid for . We further observe that the relations satisfied by the ’s are compatible with the braid relations. Therefore, there is a surjection from to by assigning and and another one by assigning and .
We can further reduce the presentation of using only the classical braid generators and a single bond generator . Indeed, by any of the two last relations in Theorem 6 all elementary bonds for can be expressed as conjugates of by the appropriate braid words. Suppose we fix the first ones: . Then we obtain
On the other hand, by the last relations in Theorem 6, we obtain: . So, substituting in the first of the above relations, we extract the following relation:
Therefore, using the above and applying Tietze transformations on the relations of Theorem 6, we obtain the following irredundant presentation:
Theorem 8.
The tight bonded braid monoid admits the following irredundant presentation: it is generated by the classical braid generators and their inverses and a single bond generator , subject to the following relations:
7. An Analogue of the Alexander Theorem for Bonded Links
As noted in Section 6, one can apply to a bonded braid the usual closure operation and obtain a bonded link (recall Figure 44). In this section we focus on the theory of topological standard bonded links and we present a braiding algorithm for oriented standard bonded links. Namely, we prove the following bonded analogue of the Alexander Theorem for classical links:
Theorem 9
(Braiding theorem for bonded links). Every oriented topological standard bonded link can be represented topological vertex isotopically as the closure of a standard resp. tight bonded braid.
Proof.
For proving the theorem we adapt to the bonded setting the braiding algorithm used in [7] for braiding classical oriented link diagrams. The main idea was to keep the downward arcs (with respect to the top-to-bottom direction of the plane) of the oriented link diagrams fixed and to replace upward arcs with braid strands. Upward arcs may need to be further subdivided into smaller arcs, each passing either over or under other arcs, as shown in Figure 59, which we label with an ‘o’ or a ‘u’ accordingly. These final upward arcs are called up-arcs. If an up-arc contains no crossings, then the choice is arbitrary.
Figure 59.
Upward-oriented arcs are further subdivided to up-arcs, entirely ‘over’ or ‘under’.
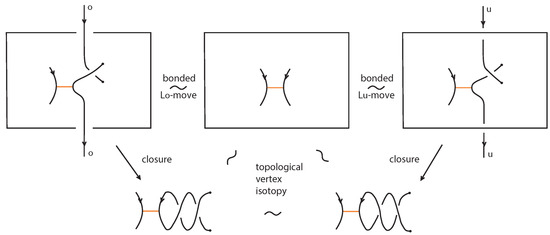
We assume, by general position, that there are no horizontal or vertical link arcs and that no two subdividing points or local maxima and minima or crossings are vertically aligned and no crossing is horizontally aligned with a bond. We then proceed with applying the braiding moves, as illustrated abstractly in Figure 60. We perform an o-braiding move on an up-arc with an ‘o’ label, whereby the new pair of corresponding braid strands replacing the up-arc run both entirely over the rest of the diagram (see Figure 60), and analogous u-braiding moves on the up-arcs with a ‘u’ label.
Figure 60.
Braiding moves for up-arcs.
In order to use this classical braiding algorithm on standard/tight bonded links we need to deal further with situations containing bonds. In the bonded general position, we also require that a node is not vertically aligned with subdividing points or local maxima and minima.
- Step 1:
- We first bring all bonds to horizontal position using (bonded) planar isotopy, observing the general position rules. See Figure 61.
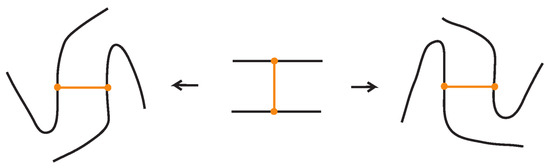 Figure 61. Bringing bonds to horizontal position.
Figure 61. Bringing bonds to horizontal position.
- Step 2:
- We next deal with up-arcs in the diagram that contain at least one node of a bond, standard or tight. For this we apply the isotopy moves TVT or RVT as exemplified in Figure 62 and Figure 63, according to whether the two joining arcs are antiparallel or parallel upward arcs. Note that the braiding preparation of a bonded region with two parallel upward arcs can also be achieved with planar isotopy, by performing a 180-degree rotation on the plane. Then the bonds will only lie on down-arcs, so that the braiding algorithm will not affect them.
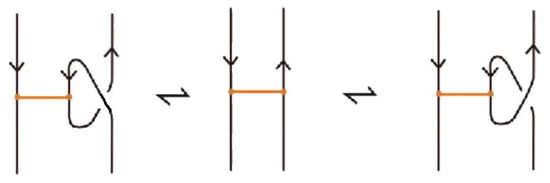 Figure 62. Braiding preparation for two antiparallel bonded arcs using TVT-moves.
Figure 62. Braiding preparation for two antiparallel bonded arcs using TVT-moves.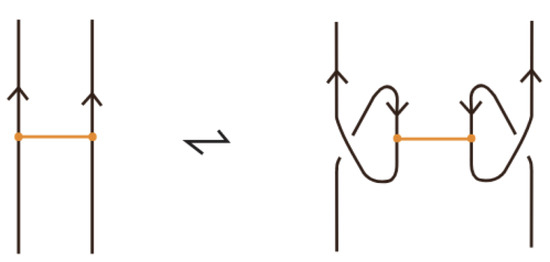 Figure 63. Braiding preparation for two parallel bonded arcs oriented upward using RVT-moves.
Figure 63. Braiding preparation for two parallel bonded arcs oriented upward using RVT-moves.
- Step 3:
- Finally, we apply the braiding algorithm of [7] for the link diagram, ignoring the bonds. After eliminating all up-arcs, we obtain a standard bonded braid, the closure of which is—by construction—isotopic to the original oriented bonded link diagram.
- Step 4:
- In the end of the process some braid strands may cross over or under some bonds. Using the braided vertex slide moves (recall Figure 57) we bring them to tight form. The algorithm above provides a proof of Theorem 9.
□
Remark 7.
- (a)
- Note that in the rigid vertex category it is not possible to braid two antiparallel strands that are connected by a bond. This is because braiding such strands necessarily requires the use of a topological vertex twist at one of the nodes, a move that is forbidden in the rigid vertex category. For this reason we restricted our focus to the topological vertex category.
- (b)
- The vertex slide moves for bringing the bonds to tight form (recall Figure 28) could have been already applied after Step 1 or Step 2. In the end we might still need to apply the braided vertex slide moves for new braid strands.
8. Bonded Braid Equivalences
To determine whether two classical braids yield isotopic knots or links via their closures, the Markov theorem provides the necessary and sufficient conditions [5]. It states that two braids have equivalent closures if and only if they are related by a finite sequence of
- Conjugation: ;
- Stabilization move: .
In [7] a one-move analogue of the Markov theorem is formulated using the L-moves, which generalize the stabilization moves and also generate conjugation.
In this section we formulate and prove two bonded braid equivalences for topological bonded braids: the bonded L-equivalence for standard bonded braids and the tight bonded L-equivalence for tight bonded braids. For proving a braid equivalence we need to have the diagrams in general position, as described in the proof of the bonded braiding algorithm, to which we now add the triangle condition, whereby any two sliding triangles of up-arcs do not intersect. This is achieved by further subdivision of up-arcs, if needed, and it allows any order in the sequence of the braiding moves. We note here that the interior of a sliding triangle may intersect a bond.
We proceed with introducing the notion of L-moves in the bonded setting. In the classical setting, the L-moves naturally generalize the stabilization moves in the Markov theorem for classical braids, since an L–move is equivalent to adding in a braid a positive or a negative crossing, so that two braids that differ by an L-move have isotopic closures. Moreover, as shown in [7], the L-moves can also realize conjugation for classical braids. On the other hand, an L–move can be created by braid isotopy, stabilization and conjugation [7]. The L–move approach to Markov-type theorems is flexible and powerful for formulating braid equivalences in practically any topological setting. They prove to be particularly useful in settings where the braid analogues do not have an apparent algebraic structure. In [7,19,20]L-moves and braid equivalence theorems are presented for different knot theories.
Definition 11.
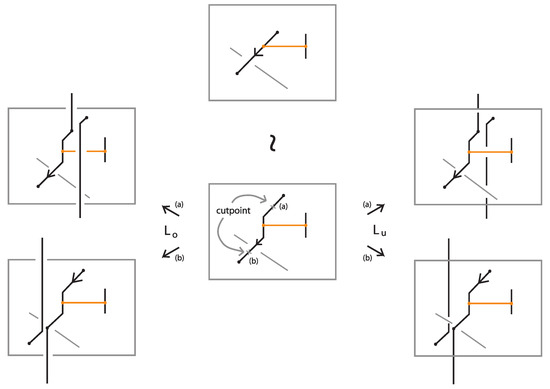
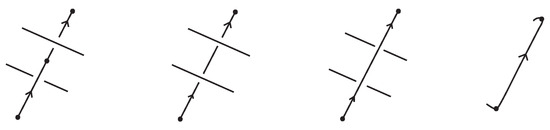
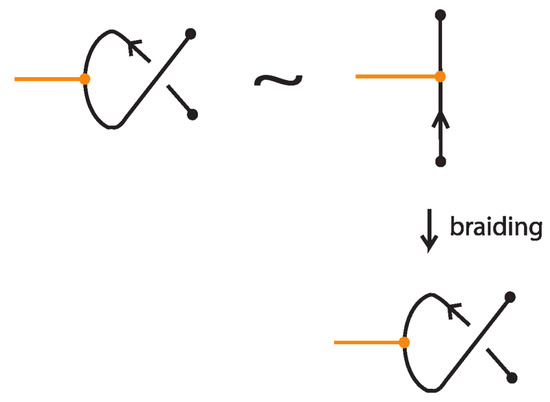
A classical L-move or simply L-move on a bonded braid β, consists in the following operation or its inverse: we cut an arc of β open and we pull the upper cutpoint downward and the lower upward, so as to create a new pair of distinct braid strands with corresponding endpoints (on the vertical line of the cutpoint), and such that both strands run entirely over or entirely under the rest of the braid (including the bonds). Pulling the new strands over will give rise to an -move and pulling under to an -move. By definition, an L-move cannot occur in a bond or at a node. By a general position argument, the new pair of strands does not pass by a crossing or a node. Figure 64 shows and moves taking place above or below a bond, on its attaching strand.
Figure 64.
L-moves on a strand with a bond.
Furthermore, a tight L-move on a tight bonded braid is defined as above, with the addition that, if the new strands are vertically aligned with a bond, the strands can be pulled to the side, right or left, using the braided vertex slide moves as described in Figure 57, see also Figure 65, so as to remain in the tight category. A pulled away L-move in the tight category shall be called tight L-move. Tight L-moves include the L-moves that do not cross bonds.
Figure 65.
A crossing formed after an L-move is performed, pulling the strands of an L-move away from the bond.
Note 1.
The closures of two bonded braids that differ by an L-move are rigid vertex isotopic. See second illustration of Figure 65, where the closure of the L-move contracts to the original arc.
Note 2.
Like in the classical setting, an L-move is equivalent to introducing a crossing in the bonded braid formed by the new pair of strands. Note that in the closure, the L-move in this form contracts to an R1 move. This formation can be further pulled away from the bond to the (far) right (or left) of the bonded braid using bonded braid isotopy. In Figure 65 the new pair of strands is pulled to the far right of the bonded braid.
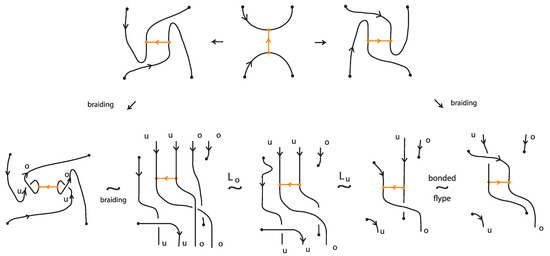
We consider now the left-hand and the right-hand side bonded diagrams in Figure 62, which differ only by the one crossing which can be positive or negative. We braid the two bonded diagrams using the braiding moves described in the proof of Theorem 9. Examining carefully the resulting bonded braids leads to the following definition.
Definition 12.
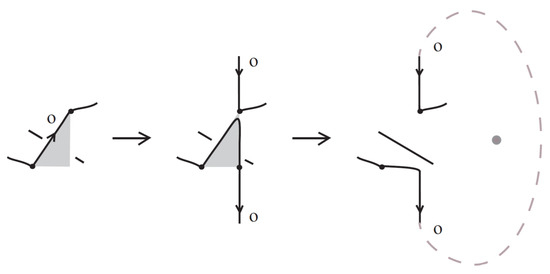
A bonded L-move between two bonded braids resembles an L-move with an in-box crossing. More precisely, a bonded -move (resp. a bonded -move) consists in the following operation or its inverse: we cut an arc adjacent to a bond node and create with the two cutpoints a crossing of specific type. We then pull the two ends, the upper upward and the lower downward, so as to create a new pair of vertically aligned braid strands, such that both strands run entirely over (resp. entirely under) the rest of the bonded braid (including the bonds). The choice of the crossing is determined by the following property: a vertex slide move with the arc of the crossing not adjacent to the bond node cannot give rise to a classical -move with a crossing (resp. a classical -move with a crossing). More precisely, if the two cutpoints lie in the upper right arc of the H-region of a bond, the crossing is positive, while if they lie in the lower right arc of the H-region, the crossing is negative. See Figure 66. If the two cutpoints lie in the upper left arc of the H-region of a bond, the crossing is negative, while if they lie in the lower left arc, the crossing is positive.
Figure 66.
Bonded L-moves.
Furthermore, a tight bonded L-move is a bonded L-move defined in analogy to a tight L-move.
Note 3.
As indcated in Figure 66, the closures of two bonded braids that differ by a bonded L-move are topologically vertex equivalent.
Definition 13.
L-moves (resp. tight L-moves) together with bonded L-moves (resp. tight bonded L-moves) and bonded braid isotopy generate an equivalence relation in the set of all bonded braids (resp. tight bonded braids), the bonded L-equivalence (resp. tight bonded L-equivalence).
We are now in a position to state one of the main results of our paper.
Theorem 10
(Bonded L-equivalence for topological bonded braids). Two bonded braids upon closure give rise to topologically vertex isotopic oriented standard bonded links if and only if they can be obtained one from the other by a finite sequence of bonded braid isotopy and the following moves:
- 1.
- L-moves,
- 2.
- Bonded L-moves,
- 3.
- Bond Commuting: .
Furthermore, two tight bonded braids upon closure give rise to topologically vertex isotopic oriented tight bonded links if and only if they can be obtained one from the other by a finite sequence of tight bonded braid isotopy and the following moves:
- 1.
- Tight L-moves,
- 2.
- Tight bonded L-moves,
- 3.
- Elementary Bond Commuting: .
The bond commuting is illustrated in Figure 67.
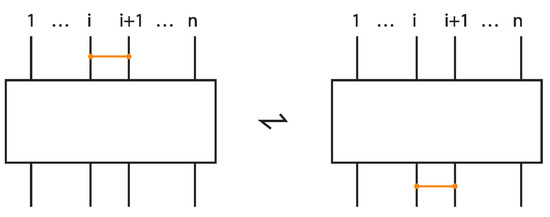
Figure 67.
Tight bond commuting.
Proof.


For the one direction, the closures of two standard/tight bonded braids that differ by the moves of either statement are clearly topologically vertex equivalent. Indeed, the closures of L-moves are discussed in Notes 1 and 2 (recall Figure 65)—for the closures of bonded L-moves see Figure 66 and Note 3— while bonded commuting is realized via planar isotopy.
For the converse, in order to ensure that the stated moves are sufficient, we need to examine any choices made for bringing a bonded diagram to general position and during the braiding algorithm, and show that they result in bonded L-equivalent bonded braids, as well as that any bonded isotopy moves on a bonded diagram correspond to bonded L-equivalent bonded braids. We shall only examine choices involving bonds. All others are proved as in the classical case [7].
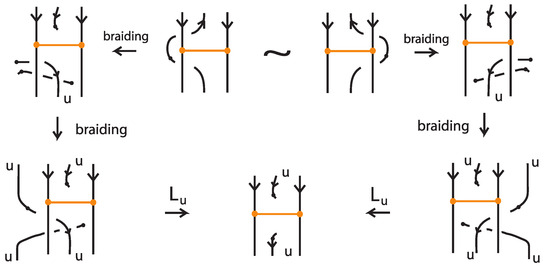
The first choice made for bringing a bonded diagram to general position is when bringing a vertical bond to the horizontal position; see Figure 61. Let be two oriented bonded diagrams that differ by one such move, from the one horizontal position to the other. Figure 68 demonstrates the L-equivalence of the corresponding bonded braids for the case of parallel attaching arcs at the nodes, after braiding the regions of the two nodes. The other cases are proved likewise. The arrow indication on the bond is placed for facilitating the reader in following the different directions. Note that, if some arcs cross the bonds, these can be pulled away in both diagrams using the same vertex slide moves, so they will be braided identically. Therefore, the moves can be assumed to be local, and that all other up-arcs in both diagrams are braided, so that we can compare in the figure the final braids.
Figure 68.
The choice of bringing a vertical bond to horizontal gives rise to L-equivalent bonded braids.
Another choice made during the braiding algorithm is when applying a TVT-move, as exemplified in Figure 62, so as to prepare our diagram for braiding. The crossing involved in the move can be positive or negative. One can then easily verify that the resulting braids are bonded L-equivalent.
Let now be two bonded diagrams that differ by a topological bonded isotopy move. For classical planar isotopies and the classical Reidemeister moves, the reader is referred to [7], as the proofs pass intact in this setting. Note that the bond commuting move as well as the move we examined above, with tight bonds, comprise bonded planar isotopy moves. The moves of type Reidemeister 2 and 3 of Theorem 1 with one bond, all end up being invisible in the bonded braid after completing the braiding. Suppose next that differ by a topological vertex twist (TVT) move. We have two cases (if we overlook the signs of the crossings), illustrated in Figure 69.
Figure 69.
The two types of oriented TVT moves.
The first type of oriented TVT (left hand side of Figure 69) is treated in Figure 70, where we first braid the region of the node in the one diagram. According to the triangle condition we may assume that the rest of the diagrams are braided, so that in the figure we compare the final bonded braids.
Figure 70.
L-equivalence of one type of an oriented TVT move.
The second type of oriented TVT (right hand side of Figure 69) is straightforward, as shown in Figure 71, where we braid the region of the node in the one diagram using the same crossing as in the other diagram.
Figure 71.
Braiding consistently the node in the oriented TVT move results in identical diagrams.
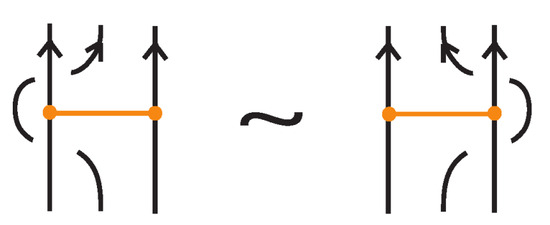
We finally check the vertex slide (VS) moves. The three representing cases of oriented VS moves with the middle arc being an up-arc are illustrated in Figure 72, Figure 73 and Figure 74. The moves are considered local so that all other braiding is done and we can compare the final braids. Figure 72 shows the case of parallel down-arcs at the bonding sites. After the performance of the L-moves, we see that the move is invisible on the bonded braid level.
Figure 72.
An oriented VS move with parallel down-arcs and its braiding analysis.
Figure 73.
An oriented VS move with antiparallel down-arcs and its braiding analysis.
Figure 74.
The braiding analysis of an oriented VS move with parallel up-arcs reduces to the previous cases.
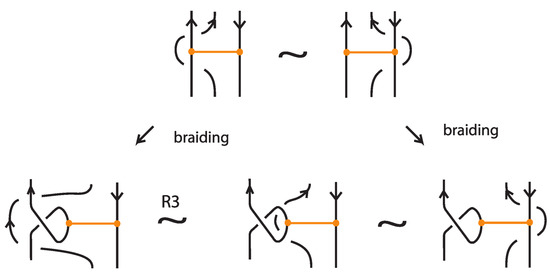
Figure 73 shows the case of antiparallel arcs at the bonding sites. After braiding the up-arc with a TVT move, we perform a classical R3 move, which ensures L-equivalent bonded braids, and we arrive at the formation of the previous case.
Finally, Figure 74 shows the case of parallel up-arcs at the bonding sites. Clearly this move rests also on the previous cases after braiding up-arcs at the nodes with TVT moves and performing R3 moves.
Note that, if some arcs cross the bonds in either one of the three cases, these can be pulled away in both diagrams involved in the move, using the same vertex slide moves, so they will be braided identically. In the course of proving this Theorem, it becomes apparent that it suffices to assume that all bonds are contracted to tight bonds. Likewise all L-moves can be assumed to be tight L-moves by bonded braid isotopy. From the proof above it follows that, eventually, we only need to check the moves of Theorem 2.
We have checked all moves of Theorems 1 and 2, so the proof of both statements is completed. □
Note 4.
It is important to emphasize on the fact that bond commuting (in the closure of bonded braids) constitute equivalence moves for bonded braids, since these moves are not captured by the L-moves. The situation is in direct comparison with the L-move equivalence for singular braids, where the commuting of a singular crossing is imposed in the equivalence (see [19]).
The L-moves naturally generalize the stabilization moves for classical braids, since an L–move is equivalent to adding a positive or a negative crossing (see Note 2 and Figure 65). Moreover, as shown in [7], the L-moves can also realize conjugation for classical braids and this carries through also to bonded braids. On the other hand, as demonstrated in Figure 65, an L–move can be created by braid isotopy, stabilization and conjugation. Hence, we may replace moves (1) of Theorem 10 and, along with the algebraization of the bonded L-moves, we can obtain the analogue of the Markov theorem for bonded braids. This will be discussed in a future paper.
9. The Theory of Enhanced Bonded Links and Braids
We now extend the bonded knot theory by introducing enhanced bonds. In an enhanced bonded link, each bond is assigned one of two types, conventionally termed attracting vs. repelling bonds (see Figure 75). These types are meant to model different physical interactions: for example, an attracting bond might represent a bond arising from an attractive force (like a disulfide bond pulling two parts of a protein together), whereas a repelling bond may model an effective constraint that prevents two regions from approaching too closely, for example due to steric hindrance or electrostatic repulsion. Topologically, we can regard an attracting or a repelling bond as the same kind of embedded arc as before, but we treat them as ‘inverses’ of one another in an algebraic sense. We will formalize this by allowing bonds to be cancelling inverses on the level of enhanced bonded braids.
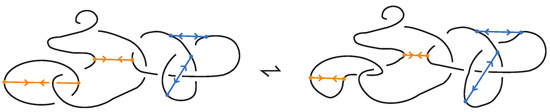
Figure 75.
Interpretation of enhanced bonds as ‘attracting’ and ‘repelling’.
In this section, we first define enhanced bonded links and the moves that relate them. Then we introduce the enhanced bonded braid group, denoted , which extends the bonded braid monoid by adding inverses for the bond generators. We then describe analogues of the Alexander and Markov theorems and L-equivalence in the enhanced context. We believe that the theory of enhanced bonded links can serve as a better model for biological knotted objects, as well as in other physical situations.
9.1. Enhanced Bonds: Attracting vs. Repelling
Definition 14.
An (oriented) enhanced bonded knot/link is a pair , where L is an (oriented) link in , and is a finite set of bonds, as defined in Definition 1, and such that each element of the subset is equipped with two arrows pointing toward one another, and each element of the subset is equipped with two arrows pointing away from one another. Call elements of attracting bonds and elements of repelling bonds. For an example see Figure 75 where the enhanced bonds are standard. Moreover, two adjacent bonds are called parallel if together they form two opposite sides of a standardly embedded rectangular band, so that the other two sides are link arcs, and such the band can be contracted by isotopy to a regularly projected planar tight rectangle (in the sense that its interior does not intersect other arcs or bonded arcs). Further, if we have two adjacent parallel bonds of opposite type, then they cancel, meaning that the pair of bonds can be removed. An enhanced bonded link diagram is a diagram of an (oriented) enhanced bonded knot/link.
Regarding isotopy, the moves we introduced for bonded links do not alter the types assigned to the bonds in enhanced bonded links. So, enhanced bonded isotopy is defined in the same way as bonded isotopy, with the additional requirements that the bond type (attracting or repelling) assigned to each bond remains fixed throughout the isotopy, and that parallel bonds of opposite type cancel; see Figure 76. Both isotopy categories, topological and rigid vertex, continue to apply in this setting, as do the three diagrammatic forms: long, standard, and tight enhanced bonded links.
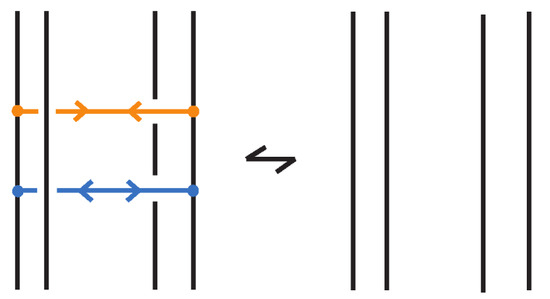
Figure 76.
Cancellation of parallel bonds of opposite type.
Remark 8.
Note that it is possible to generalize the definition of enhanced bonded link diagrams to include bonds that are without the above form of enhancement (so that they do not have inverses) and also, one can include many types of bonds, with or without inverses, if these are needed. We retain the above definition in our discussion for the sake of simplicity.
9.2. The Enhanced Bonded Braid Group
Recall that bonded braids are defined as classical braids equipped with embedded horizontal simple arcs, the bonds. Similarly, enhanced bonded braids are classical braids equipped with two different types of bonds, the attracting and the repelling bonds. By abuse of notation, we shall denote by an attracting elementary enhanced bond and by we shall denote the corresponding repelling bond. Moreover, we will denote by an attracting bond between the and strands of an enhanced bonded braid, and by the corresponding repelling bond, such that when we have two consecutive bonds of different types between the same strands of an enhanced bonded braid, they cancel out (see Figure 76 and 79).
Recall that the singular braid monoid is isomorphic to the bonded braid monoid, (Theorem 7). Also that, as shown in [28], embeds into a group, called the singular braid group. This proves that the argument in [28] extends to the bonded braid context, so that the bonded braid monoid also embeds into a group isomorphic to the the singular braid group, corresponding the two distinct types of enhanced bonds, attracting and repelling, to the two distinct types of marked singular crossings, as illustrated in Figure 77.
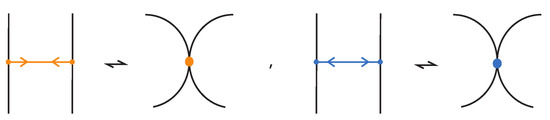
Figure 77.
The bonds as marked singular crossings.
Hence, we have shown the following:
Theorem 11.
The bonded braid monoid embeds into a group, the enhanced bonded braid group.
The above results lead to the definition of the enhanced bonded braid group with operation the concatenation of bonded braids in the set of enhanced bonded braids on n-strand. Note that as in the case of bonded braids, we will denote by all possible sequences of o’s and u’s, that indicate the type of the crossings formed between the enhanced bond and the strands of the braid, and by its corresponding inverse in the enhanced bonded braid group. Finally, isotopy between two enhanced bonded braids is defined in the same way as isotopy between bonded braids, since these isotopy moves do not alter the type on the enhanced bonds. Then with the same reasoning as earlier we obtain the following:
Theorem 12.
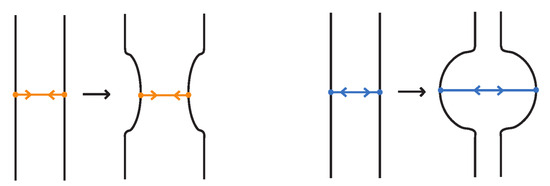
The enhanced tight bonded braid group is the group generated by , the attracting bonds and the repelling bonds , collectively called enhanced bonds (see Figure 78), with operation the usual braid concatenation. The generators satisfy the same relations as the generators of the tight bonded braid monoid, , together with the following relations:
Figure 78.
The enhanced bonds and .
In Figure 79 we demonstrate the relations .
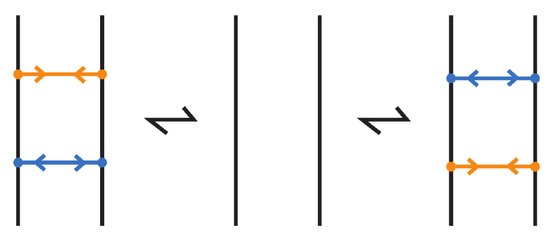
Figure 79.
The relations .
Note that when two enhanced bonds cancel, the underlying knot is not affected by the cancellation.
We further note that, as in the tight bonded braid monoid (recall Theorem 8), the enhanced tight bonded braid group also admits an irredundant presentation:
Theorem 13.
The enhanced tight bonded braid group admits an irredundant presentation with generators the classical invertible braid generators together with a single attracting bond generator and its inverse , subject to the following relations:
9.3. Analogues of the Alexander and Markov Theorems for Enhanced Bonded Braids
In this subsection we present analogues of the Alexander theorem and the Markov theorem in the form of L-equivalences for enhanced bonded braids. The main idea is that the bonded isotopy moves remain the same as for usual bonds, so enhanced bonds respect the braiding algorithm presented in Section 7, and the results we obtained for the bonded L-equivalences in Section 8 also carry through. We have the following analogue of the classical Alexander theorem:
Theorem 14
(Braiding theorem for enhanced bonded links). Every oriented topological standard enhanced bonded link can be represented isotopically as the closure of a standard resp. tight enhanced bonded braid.
Before moving toward a braid equivalence theorem for enhanced bonded braids, we first generalize the notion of the classical L-moves and the bonded L-moves to this setting. We define an L-move and a bonded L-move on an enhanced bonded braid as in Definitions 11 and 12, by ignoring the types of the bonds (recall Figure 64). It follows from the results Section 8 that with the use of the classical/bonded L-moves on enhanced bonded braids, we obtain the enhanced bonded L-equivalence for enhanced bonded braids, by treating enhanced bonds as simple bonds. Namely, we obtain the following:
Theorem 15
(Bonded L-equivalence for enhanced bonded braids). Two enhanced bonded braids upon closure give rise to topologically vertex isotopic oriented enhanced standard bonded links if and only if they can be obtained one from the other by a finite sequence of enhanced bonded braid isotopy and the following moves:
- 1.
- L-moves,
- 2.
- Bonded L-moves,
- 3.
- Enhanced Bond Conjugation: .
Furthermore, two enhanced tight bonded braids upon closure give rise to topologically vertex isotopic oriented enhanced tight bonded links if and only if they can be obtained one from the other by a finite sequence of tight bonded braid isotopy and the following moves:
- 1.
- Tight L-moves,
- 2.
- Tight Bonded L-moves,
- 3.
- Enhanced Elementary Bond Conjugation: .
We can replace moves (1) of Theorem 15 by considering stabilization moves and conjugation for classical braids and, along with the algebraization of the bonded L-moves, we obtain the analogue of the Markov theorem for enhanced bonded braids. This is the subject of a sequel work.
10. Conclusions and Further Work
In this paper we have used topological, diagrammatic, and algebraic methods to define and analyze bonded structures. This means that it is assumed that the reader understands how to translate such language into three dimensions. Diagrams can be regarded as schemata for producing specific three dimensional structures and embeddings, just as a weaving pattern is an instruction for producing a given weave. Our topological argumentation is fully rigorous because the diagrammatics are a formal system for these topological and combinatorial structures. Thus the diagrammatics have a pivotal place where one has formality on the one hand and interpretability on the other.
This topologists’ stance may be new to some scientists who look directly at the three-dimensional structure. Our approach is particularly useful for the formulation of algebraic invariants and for the formulation of algorithms for computation of invariants. To understand the full story of subjects like protein folding, one needs three three-dimensional structure and here the diagrams provided a basis for further articulation. If we wish to further study physical interactions (beyond the present paper), then one can add more structure to the combinatorial models given here and work with them three-dimensionally. This is a project for further research, and it promises deeper relationships between our invariants and the physical behaviours of molecules.
The combinatorial and algebraic coding of structures that we use in this paper has many potentials for applications. The standard diagramming can be used to produce embeddings in three dimensional space directly. The braid representations are concise algebraic methods to encode bonded structures and they are new and need to be studied further for their potential. Each method of formalizing a three-dimensional topological structure has its own properties that deserve further research.
In a paper to follow the present work, we will investigate more deeply the invariants described here. These include the unplugging invariants, the invariants using insertion and the Kauffman Bracket and Jones polynomials, and the new invariants that arise from the L-move braiding formulations for bonded knots and links. In the case of the L-moves, we will continue the formulation in terms of generalizations of the algebraic Markov theorem for bonded braids and consequent invariants defined in these terms.
Computational approaches to our work include the use of molecular databases (we refer to Sulkowska’s works in KnotProt and the Protein Data Base [15]) where one can translate three-dimensional data into the combinatorics, allowing one to compute invariants and analyse the bonding structure of proteins. In the other direction one can translate diagrammatic encoding into chosen three-dimensional embeddings and then work with these models in three dimensional space, including comparison with molecules from the database. This relationship with experimental and three-dimensional information is ongoing. We have used these methods in our previous work and will continue to use them in applications of the present research.
In the case of the ideas we have suggested for Feynman diagrams, the ideas are in a state of flux in that it is not yet clear that adding knotted structure to Feynman diagrams will advance the understanding of the quantum field theory. On the other hand, field theoretic approaches to protein folding are clearly needed (and under investigation [22]) and we need to see how such approaches are related to the three-dimensional combinatorial and topological structure of molecules. The Feynman diagrams are an intermediation between the field theory and the combinatorics. For all these reasons we regard the present work as constructing a foundation for much-needed further research.
Bonded knotoids are especially relevant for modeling open chains such as proteins. We will revisit bonded knotoids [16], their closure operations (introducing the bonded closure), and we will introduce the theory of (enhanced) bonded braidoids and their topological interaction with bonded knotoids.
In another direction we will define the plat closure for bonded braids and braidoids and formulate Hilden and Birman type theorems for turning an unoriented bonded knot/knotoid to bonded plat/platoid and for their equivalences.
We will explore a bonded Morse category, a natural next step for multi-knotoids and linkoids: a Morse-theoretic diagrammatics that admits cups/caps and incorporates bonds. This framework will carry a corresponding move calculus and normal-form results, enabling functorial invariants via monoidal functors to module categories (with trace constructions).
Author Contributions
Conceptualization, I.D., L.H.K. and S.L.; methodology, I.D., L.H.K. and S.L.; formal analysis, I.D., L.H.K. and S.L.; investigation, I.D., L.H.K. and S.L.; writing—original draft preparation, I.D., L.H.K. and S.L.; writing—review and editing, I.D., L.H.K. and S.L.; visualization, I.D., L.H.K. and S.L. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Data Availability Statement
No new data were created or analyzed in this study. Data sharing is not applicable to this article.
Acknowledgments
Much of this work has been presented in conferences in a number of places, such as University of Ljubljana, Banff International Research Station, SKCM2 WPI Hiroshima University, Vrije Universiteit Amsterdam, Odessa National University of Technology. We wish to thank each Reviewer for their succinct comments, which helped improve the quality of this paper.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Kauffman, L.H. Invariants of graphs in three-space. Trans. Am. Math. Soc. 1989, 311, 697–710. [Google Scholar] [CrossRef]
- Kauffman, L.H.; Magarshak, Y. Vassiliev knot invariants and the structure of RNA foldings. In Knots and Applications; Kauffman, L.H., Ed.; World Scientific: Singapore, 1995; pp. 343–394. [Google Scholar]
- Baez, J.C. Link invariants of finite type and perturbation theory. Lett. Math. Phys. 1992, 26, 43–51. [Google Scholar] [CrossRef]
- Alexander, J.W. A lemma on systems of knotted curves. Proc. Natl. Acad. Sci. USA 1923, 9, 93–95. [Google Scholar] [CrossRef] [PubMed]
- Markov, A.A. Über die freie Äquivalenz geschlossener Zöpfe. Recl. Math. Moscou 1935, 1, 73–78. [Google Scholar]
- Jones, V.F.R. Hecke algebra representations of braid groups and link polynomials. Ann. Math. 1987, 126, 335–388. [Google Scholar] [CrossRef]
- Lambropoulou, S.; Rourke, C.P. Markov’s theorem in 3-manifolds. Topol. Its Appl. 1997, 78, 95–122. [Google Scholar] [CrossRef]
- Turaev, V. Knotoids. Osaka J. Math. 2012, 49, 195–223. [Google Scholar]
- Gügümcü, N.; Kauffman, L.H. New invariants of knotoids. Eur. J. Combin. 2017, 65, 186–229. [Google Scholar] [CrossRef]
- Gügümcü, N.; Lambropoulou, S. Braidoids. Isr. J. Math. 2021, 242, 955–995. [Google Scholar] [CrossRef]
- Goundaroulis, D.; Dorier, J.; Benedetti, F.; Stasiak, A. Studies of global and local entanglements of individual protein chains using the concept of knotoids. Sci. Rep. 2017, 7, 6309. [Google Scholar] [CrossRef]
- Skolnick, J.; Gao, M. The role of local versus nonlocal physicochemical restraints in determining protein native structure. Curr. Opin. Struct. Biol. 2021, 68, 1–8. [Google Scholar] [CrossRef]
- Mugler, A.; Tans, S.; Mashaghi, A. Circuit topology of self-interacting chains: Implications for folding and unfolding dynamics. Phys. Chem. Chem. Phys. R. Soc. Chem. 2014, 16, 22537–22544. [Google Scholar] [CrossRef]
- Dombkowski, A.A.; Sultana, K.Z.; Craig, D.B. Protein disulfide engineering. FEBS Lett. 2014, 588, 206–212. [Google Scholar] [CrossRef]
- Dabrowski-Tumanski, P.; Rubach, P.; Goundaroulis, D.; Dorier, J.; Sułkowski, P.; Millett, K.C.; Rawdon, E.J.; Stasiak, A.; Sulkowska, J.I. KnotProt 2.0: A database of proteins with knots and other entangled structures. Nucleic Acids Res. 2018, 47, D367–D375. [Google Scholar] [CrossRef]
- Goundaroulis, D.; Gügümcü, N.; Lambropoulou, S.; Dorier, J.; Stasiak, A.; Kauffman, L.H. Topological models for open-knotted protein chains using the concepts of knotoids and bonded knotoids. Polymers 2017, 9, 444. [Google Scholar] [CrossRef]
- Gabrovšek, B. An invariant for colored bonded knots. Stud. Appl. Math. 2021, 146, 586–604. [Google Scholar] [CrossRef]
- Adams, C.; Devadoss, J.; Elhamdadi, M.; Mashaghi, A. Knot theory for proteins: Gauss codes, quandles and bondles. J. Math. Chem. 2020, 58, 1711–1736. [Google Scholar] [CrossRef]
- Lambropoulou, S. L-moves and Markov theorems. J. Knot Theory Its Ramif. 2007, 16, 1459–1468. [Google Scholar] [CrossRef]
- Kauffman, L.H.; Lambropoulou, S. Virtual braids and the L-moves. J. Knot Theory Ramif. 2006, 15, 773–811. [Google Scholar] [CrossRef]
- Kreimer, D. Knots and Feynman Diagrams; Cambridge University Press: Cambridge, UK, 2000. [Google Scholar]
- Niemi, A. Are glueballs knotted closed strings? In Proceedings of the International Conference on Color Confinement and Hadrons in Quantum Chromodynamics (Confinement 2003), Wako, Japan, 21–24 July 2003; pp. 127–139. [Google Scholar]
- Buniy, R.; Kephart, T. Universal energy spectrum of tight knots and links in physics. In Physical and Numerical Models in Knot Theory Including Applications to the Life Sciences; Calvo, J., Millett, K.C., Rawdon, E.J., Stasiak, A., Eds.; World Scientific: Singapore, 2005; pp. 45–63. [Google Scholar]
- Jonoska, N.; Winfree, E. (Eds.) Visions of DNA Nanotechnology at 40 for the Next 40: A Tribute to Nadrian C. Seeman; Natural Computing Series; Springer: Berlin/Heidelberg, Germany, 2023. [Google Scholar]
- Aicardi, F.; Juyumaya, J. Tied links. J. Knot Theory Ramif. 2016, 25, 1641001. [Google Scholar] [CrossRef]
- Diamantis, I. Tied pseudo links & pseudo knotoids. Mediterr. J. Math. 2021, 18, 201. [Google Scholar] [CrossRef]
- Birman, J.S. New points of view in knot theory. Bull. Amer. Math. Soc. (New Ser.) 1993, 28, 253–287. [Google Scholar] [CrossRef]
- Fenn, R.; Keyman, E.; Rourke, C.P. The singular braid monoid embeds in a group. J. Knot Theory Ramif. 1998, 7, 881–892. [Google Scholar] [CrossRef]










































































Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).