
One More Thing on the Subject: Generating Chaos via x|x|a−1, Melnikov’s Approach Using Simulations




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. The Model
3. Considerations in the Light of Melnikov’s Approach
4. Some Simulations
5. Concluding Remarks
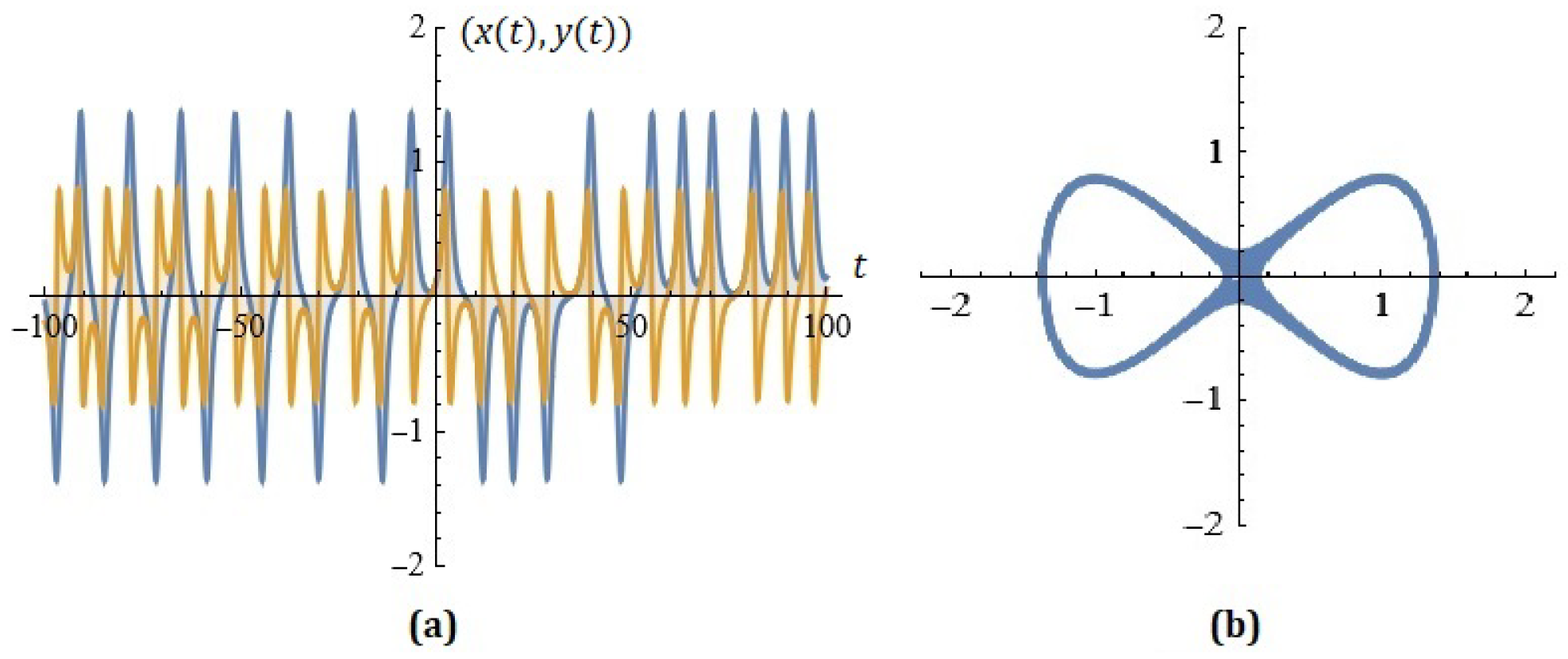
- Diverting homoclinic chaos in a class of piecewise smooth oscillators to stable periodic orbits using small parametrical perturbations is considered in [19]. The authors consider the modelwhere F is the amplitude, is the angular frequency, and is the phase position of the sinusoidal control signal. Other interesting results can be found in [20,21,22]. In a number of cases, in the process of calculating Melnikov’s functions, researchers find that their expressions cannot be solved analytically because homoclinic orbits are very complex. For this purpose, numerical algorithms are usually proposed and used in practice. Following the considerations in this article, the reader can successfully formulate and investigate the dynamics of the following new class of extended mixed oscillators:The detailed study of the dynamic model, as well as the role of the coefficients in generating a probabilistic construction for controlling oscillations, will be the subject of our future research.
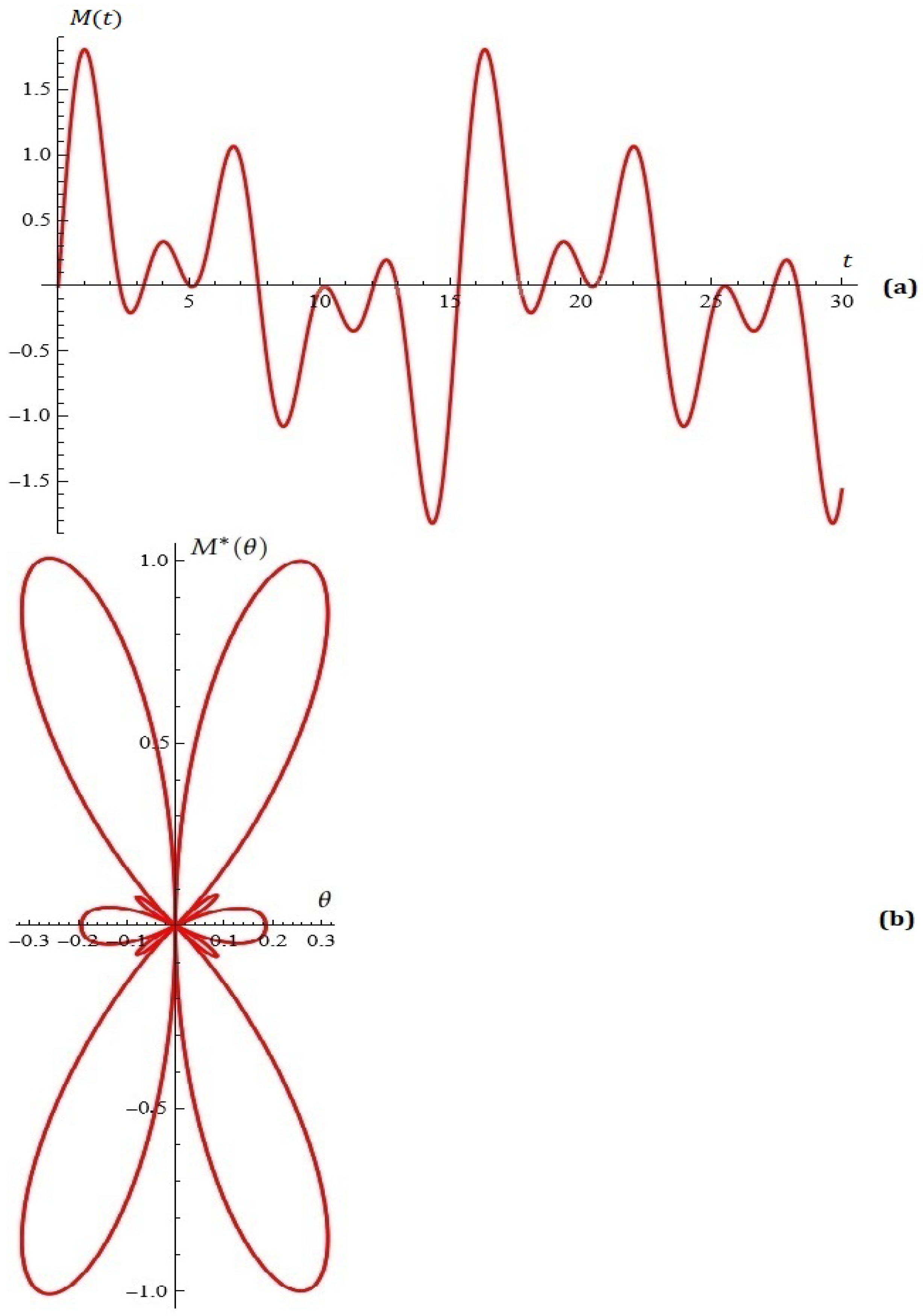
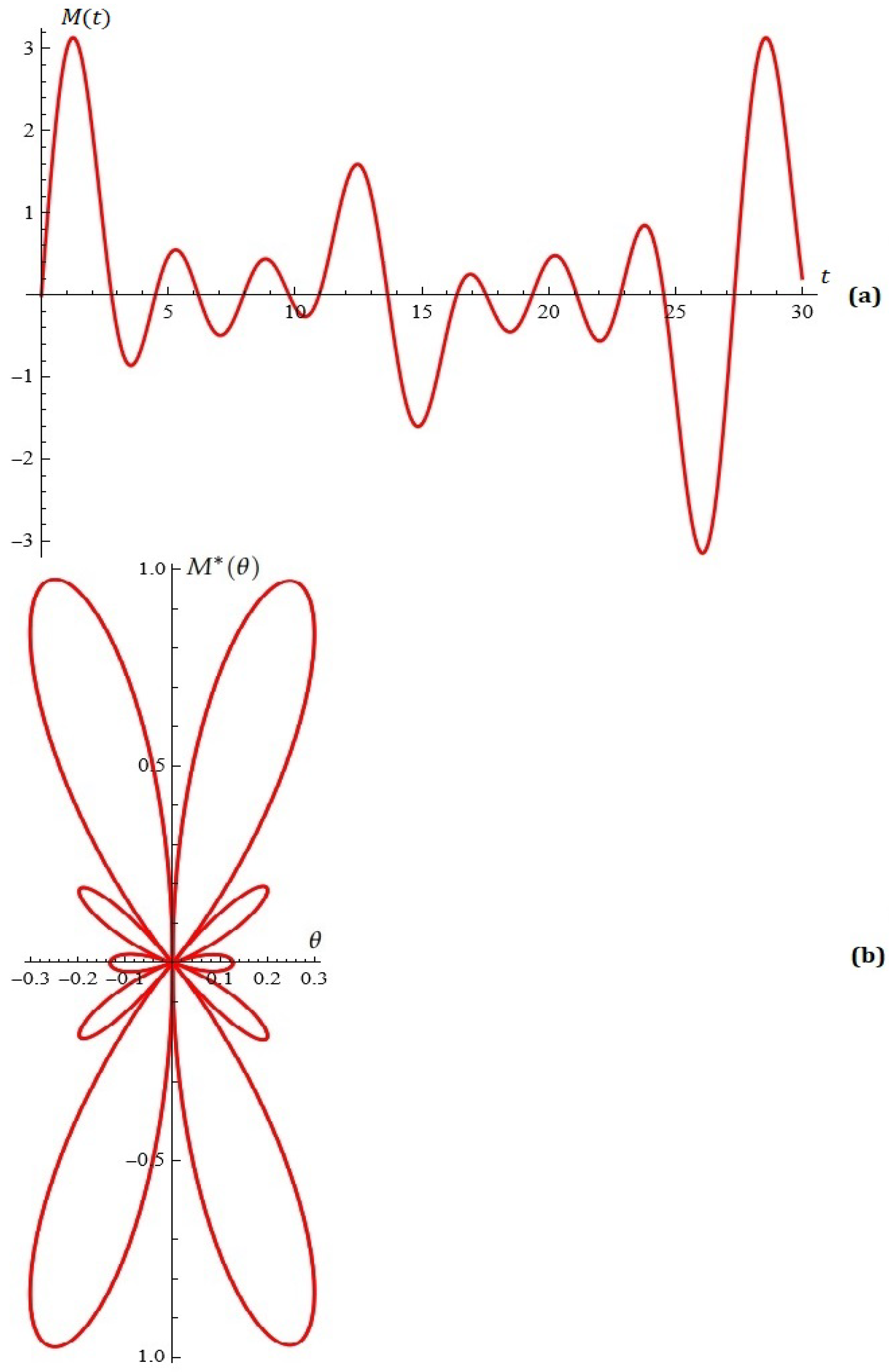
- Obviously, Melnikov polynomials can be used to approximate arbitrary point sets in the plane about a uniform metric. Such tasks are relevant to the general theory of synthesis and analysis of digital filters and radiation diagrams. The general N-element linear phased array factor used to find coefficients iswhere , d is element separation, is polar angle, and , where is a design parameter. This idea was borrowed from Soltis [23], where new Gegenbauer–like and Jacobi–like antenna arrays were generated. Of course, this relatively new idea of justification and right to exist is subject to serious research by specialists working in this scientific field. The issue related to noise minimization (in decibels) also remains to be investigated.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Sanjuan, M. The effect of nonlinear damping on the universal oscillator. Int. J. Bifurc. Chaos 1999, 9, 735–744. [Google Scholar] [CrossRef]
- Soliman, M.; Thompson, J. The effect of nonlinear damping on the steady state and basin bifurcation patterns of a nonlinear mechanical oscillator. Int. J. Bifurc. Chaos 1992, 2, 81–91. [Google Scholar] [CrossRef]
- Fangnon, R.; Ainamon, C.; Monwanou, A.; Mowadinou, C.; Orou, J. Nonlinear dynamics of the quadratic damping Helmholtz oscillator. Complexity 2020, 2020, 8822534. [Google Scholar] [CrossRef]
- Bikdash, M.; Balachandran, B.; Nayfeh, A. Melnikov analysis for a ship with a general roll-damping model. Nonl. Dyn. 1994, 6, 101–124. [Google Scholar] [CrossRef]
- Ravindra, B.; Mallik, A. Stability analysis of a non–linearly clamped Duffing oscillator. J. Sound Vib. 1999, 171, 708–716. [Google Scholar] [CrossRef]
- Ravindra, B.; Mallik, A. Role of nonlinear dissipation in soft Duffing oscillators. Phys. Rev. E 1984, 49, 4950–4954. [Google Scholar] [CrossRef]
- Sanjuan, M. Monoclinic bifurcation sets of driven nonlinear oscillators. Int. J. Theor. Physics 1996, 35, 1745–1752. [Google Scholar] [CrossRef]
- Kyurkchiev, N.; Zaevski, T.; Iliev, A.; Kyurkchiev, V.; Rahnev, A. Generating Chaos in Dynamical Systems: Applications, Symmetry Results, and Stimulating Examples. Symmetry 2024, 16, 938. [Google Scholar] [CrossRef]
- Kyurkchiev, N.; Zaevski, T.; Iliev, A.; Kyurkchiev, V.; Rahnev, A. Dynamics of a new class of oscillators: Melnikov’s approach, possible application to antenna array theory. Math. Inf. 2024, 67, 1–15. [Google Scholar]
- Tang, K.; Man, K.; Zhong, G.; Chen, G. Generating chaos via x|x|. IEEE Trans. Circuit Syst. Fundam. Theory Appl. 2001, 48, 636–640. [Google Scholar] [CrossRef]
- Cveticanin, L.; Zukovic, M. Melnikov’s criteria and chaos in systems with fractional order deflection. J. Sound Vib. 2009, 326, 768–779. [Google Scholar] [CrossRef]
- Tsend, W.; Dugungji, J. Nonlinear vibration of a buckled beam under excitation. J. Appl. Math. 1971, 38, 467–476. [Google Scholar]
- Holmes, P.; Marsden, J. A partial differential equation with infinitely many periodic orbits: Chaotic oscillations. Arch. Ration. Mech. Anal. 1981, 76, 135–166. [Google Scholar] [CrossRef]
- Du, L.; Zhao, Y.; Lei, Y.; Hu, J.; Yue, X. Suppression of chaos in a generalized Duffing oscillator with fractional-order deflection. Nonlinear Dyn. 2018, 92, 1921–1933. [Google Scholar] [CrossRef]
- Zhang, Y.; Li, J.; Zhu, S.; Zhao, H. Chaos detection and control of a fractional piecewise-smooth system with nonlinear damping. Chin. J. Phys. 2024, 90, 885–900. [Google Scholar] [CrossRef]
- Melnikov, V. On the stability of a center for time–periodic perturbation. Trans. Mosc. Math. Soc. 1963, 12, 1–57. [Google Scholar]
- Golev, A.; Terzieva, T.; Iliev, A.; Rahnev, A.; Kyurkchiev, N. Simulation on a Generalized Oscillator Model: Web-Based Application. Comptes Rendus L’Academie Bulg. Sci. 2024, 77, 230–237. [Google Scholar] [CrossRef]
- Iliev, A.; Kyurkchiev, N. Nontrivial Methods in Numerical Analysis: Selected Topics in Numerical Analysis; LAP LAMBERT Academic Publishing: Saarbrucken, Germany, 2010. [Google Scholar]
- Huaqing, L.; Liao, X.; Huang, J.; Chen, G.; Dong, Z.; Huang, T. Diverting homoclinic chaos in a class of piecewise smooth oscillators to stable periodic orbits using small parametrical perturbations. Neurocomputing 2015, 149, 1587–1595. [Google Scholar]
- He, X.; Li, C.; Shu, Y. Bogdanov-Takens bifurcation in a single inertial neuron model with delay. Neurocomputing 2012, 89, 193–201. [Google Scholar] [CrossRef]
- Li, C.; Chen, G. Coexisting chaotic attractors in a single neuron model with adapting feedback synapse. Chaos Solitons Fractals 2005, 23, 1599–1604. [Google Scholar] [CrossRef]
- Dong, T.; Liao, X.; Huang, T.; Li, H. Hopf-pitchfork bifurcation in an inertial two-neuron system with time delay. Neurocomputing 2012, 97, 223–232. [Google Scholar] [CrossRef]
- Soltis, J. New Gegenbauer-like and Jacobi-like polynomials with applications. J. Frankl. Inst. 1993, 33, 635–639. [Google Scholar] [CrossRef]



Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kyurkchiev, N.; Iliev, A.; Kyurkchiev, V.; Rahnev, A. One More Thing on the Subject: Generating Chaos via x|x|a−1, Melnikov’s Approach Using Simulations. Mathematics 2025, 13, 232. https://doi.org/10.3390/math13020232
Kyurkchiev N, Iliev A, Kyurkchiev V, Rahnev A. One More Thing on the Subject: Generating Chaos via x|x|a−1, Melnikov’s Approach Using Simulations. Mathematics. 2025; 13(2):232. https://doi.org/10.3390/math13020232
Chicago/Turabian StyleKyurkchiev, Nikolay, Anton Iliev, Vesselin Kyurkchiev, and Asen Rahnev. 2025. "One More Thing on the Subject: Generating Chaos via x|x|a−1, Melnikov’s Approach Using Simulations" Mathematics 13, no. 2: 232. https://doi.org/10.3390/math13020232
APA StyleKyurkchiev, N., Iliev, A., Kyurkchiev, V., & Rahnev, A. (2025). One More Thing on the Subject: Generating Chaos via x|x|a−1, Melnikov’s Approach Using Simulations. Mathematics, 13(2), 232. https://doi.org/10.3390/math13020232