Abstract
This study introduces a data-driven twin modeling framework based on modern Koopman operator theory, offering a significant advancement over classical modal decomposition by accurately capturing nonlinear dynamics with reduced complexity and no manual parameter adjustment. The method integrates a novel algorithm with Pareto front analysis to construct a compact, high-fidelity reduced-order model that balances accuracy and efficiency. An explainable NLARX deep learning framework enables real-time, adaptive calibration and prediction, while a key innovation—computing orthogonal Koopman modes via randomized orthogonal projections—ensures optimal data representation. This approach for data-driven twin modeling is fully self-consistent, avoiding heuristic choices and enhancing interpretability through integrated explainable learning techniques. The proposed method is demonstrated on shock wave phenomena using three experiments of increasing complexity accompanied by a qualitative analysis of the resulting data-driven twin models.
Keywords:
data-driven twin model; Koopman randomized orthogonal decomposition; nonlinear PDE; explainable deep learning MSC:
00A71; 46N40; 34A45
1. Introduction
In recent years, digital twin models have emerged as powerful tools for understanding, simulating, and predicting the behavior of complex physical systems across various domains [1,2,3,4]. Despite their success in engineered systems with well-defined models and sensing infrastructures, the application of digital twins to nonlinear dynamical systems remains limited due to the inherent complexity of such dynamics. Moreover, conventional approaches often rely on full physical modeling and high computational demands, constraining their scalability and suitability for data-driven or partially observed systems.
To address key limitations in modeling nonlinear dynamical systems, this work introduces a novel theoretical formulation and an algorithmic framework within the emerging domain of data-driven twin modeling. This new paradigm is inspired by the digital twin concept but diverges fundamentally in its construction and purpose: rather than embedding a full physics-based model, the data-driven twin model is designed to learn and replicate the nonlinear behavior of a complex dynamical system directly from data, achieving high fidelity with significantly reduced model complexity.
At the core of this contribution is a new mathematically rigorous framework that decouples system evolution into stationary and dynamic components using the principles of modal decomposition [5]. Based on this theoretical foundation, this research presents the first mathematical introduction of a data-driven twin model (DTM) tailored with a novel algorithm, which is specifically formulated for unsupervised nonlinear dynamical systems.
The proposed framework defines the DTM as a reduced-order model capable of faithfully mirroring the full system behavior with significantly reduced computational complexity. This approach addresses a critical gap in existing modeling approaches, specifically the integration of real-time adaptability with the accurate simulation of nonlinear phenomena.
1.1. Modal Decomposition Literature Review and Previous Work
Modal decomposition [5] represents a generic mathematical framework for the characterization of nonlinear dynamical systems in the context of reduced-order modeling [6,7,8,9,10,11,12].
Proper Orthogonal Decomposition (POD) and Dynamic Mode Decomposition (DMD) are widely used modal decomposition methods for reducing computational complexity in modeling complex dynamical systems. POD, rooted in the Karhunen–Loève expansion independently developed by Loève [13] and Karhunen [14], was adapted to fluid mechanics by Lumley [15] to extract dominant coherent structures from turbulence. Since then, POD has been applied across turbulent and convection-dominated flows [16,17,18,19], engineering, and oceanography [20,21,22], often combined with data assimilation [23], control [24] and machine learning, including neural networks [25,26,27,28,29]. However, POD’s energy-based truncation can miss low-energy but crucial modes, reducing accuracy in complex or nonlinear systems [30,31], and its projection nature may fail to capture fine-scale or transient dynamics absent from training data, especially in long-term or highly nonlinear scenarios.
Schmid and Sesterhenn [32,33] introduced Dynamic Mode Decomposition (DMD), a numerical technique based on Koopman operator theory [34,35], which has been widely applied across science and engineering [6,10,36,37]. J. Nathan Kutz’s group significantly advanced this area by developing robust Koopman-based, data-driven modeling, and system identification methods [8,38,39,40,41]. Many DMD variants have since emerged to enhance robustness and applicability, including optimized [42], exact [38], sparsity-promoting [43], multi-resolution [40], extended [44], recursive [45], control-enabled [46], randomized low-rank [47], core sketch [48], bilinear [49], and higher-order DMD [50].
DMD captures spatiotemporal dynamics through modes with distinct frequencies and growth rates; however, its accuracy depends on proper mode selection. Identifying relevant modes often requires additional criteria involving manual tuning, domain expertise, or heuristics, increasing computational cost and limiting its use in fully unsupervised settings.
Koopman operator theory, coupled with DMD, has become a foundational tool in contemporary dynamical systems analysis and is widely regarded as a key mathematical framework of the 21st century. The author has notably advanced Koopman-based algorithms, particularly addressing challenges posed by high-dimensional data and complex temporal dynamics.
Significant contributions include the development of mode selection strategies that leverage amplitude-weighted growth rates and energy–Strouhal number criteria to systematically identify the most dynamically relevant modes [51,52]. To overcome the computational challenges of standard DMD, the author introduced the adaptive randomized dynamic mode decomposition (ARDMD) [53], enhancing efficiency and scalability in reduced-order modeling, especially within fluid dynamics applications [54].
The techniques developed in these prior studies tackled the enduring challenge of identifying dominant modes in nonlinear and unsteady systems, which is essential for precise reconstruction and forecasting. Additionally, the author has expanded the application of DMD into emerging fields such as epidemiological modeling [55,56], demonstrating its wider societal impact.
1.2. Problem Statement and Novelty of the Present Research
Acknowledging the inherent limitations of classical DMD, namely, the non-orthogonality of its modes and the substantial computational overhead linked to manual mode selection, as well as the constraints of POD, which, despite yielding orthogonal modes, still depends on heuristic or user-specified criteria for mode selection, the proposed work introduces a novel approach for constructing a data-driven twin model that accurately replicates the full dynamics of nonlinear systems while significantly reducing model complexity.
Grounded in modern Koopman operator theory, the proposed framework offers a self-consistent, interpretable, and scalable solution that eliminates manual intervention and is well suited for unsupervised learning. By integrating explainable deep learning within a rigorous mathematical setting, it ensures transparency in the modeling process, an essential feature absent in conventional black-box machine learning models.
This novel framework significantly advances Koopman-based modal decomposition. Its key contributions include the following:
- A fully self-consistent algorithm incorporating Pareto front analysis to eliminate heuristic parameter tuning;
- The integration of explainable deep learning techniques to enable transparent, adaptive, and interpretable modeling;
- A compact, high-fidelity data-driven twin model balancing accuracy and computational efficiency.
The structure of the article is organized as follows: Section 2 outlines the mathematical foundations of reduced-order modeling grounded in Koopman operator theory. Section 3 addresses the computational aspects and introduces a novel modal decomposition algorithm, which is supported by a rigorous mathematical justification. Section 4 applies the proposed method to shock wave phenomena through three experiments of increasing complexity, while Section 5 presents the corresponding numerical results. Section 6 concludes with a summary of key findings and potential directions for future research. Appendix A provides the full derivation of the analytical and numerical solutions, and Appendix B includes the pseudocode of the proposed algorithm for reproducibility and implementation. The key mathematical notations used in this article are summarized in Table 1.

Table 1.
Key notations used throughout the article.
2. Mathematical Background
2.1. Computational Complexity Reduction of PDEs by Reduced-Order Modeling
Partial differential equations (PDEs) serve as a fundamental framework for accurately modeling nonlinear dynamical phenomena, owing to their capacity to represent spatial–temporal variations in complex systems. Nevertheless, the numerical solution of PDEs is often computationally demanding, particularly in high-dimensional and strongly nonlinear settings. This computational burden necessitates strategies for complexity reduction to enable practical simulation and analysis. In this context, by reducing the dimensionality of the system while retaining its essential dynamics, reduced-order modeling significantly lowers computational cost and facilitates efficient simulation and analysis.
Suppose that represents the bounded computational domain, and let the Hilbert space of square integrable functions on be defined as follows:
to be endowed with the inner product
and the induced norm for .
Consider a nonlinear PDE for state variable , , , on domain , of the form
where is a nonlinear differential operator, with the initial condition
The Robin boundary conditions, defined by two time-continuous functions and , specified at the endpoints of the spatial domain, take the general form defined below:
where , , , and are real prescribed coefficients.
Over the past half-century, partial differential equations have been predominantly solved using numerical techniques such as the finite difference and finite element methods. While these computational tools have significantly advanced our ability to approximate complex PDE solutions, they also introduce substantial implementation complexity and often require a solid understanding of the underlying analytical structure of the equations. In modern computational mathematics, reduced-order modeling has emerged as a powerful approach to mitigate computational demands by simplifying high-dimensional PDE systems, enabling more efficient and tractable solutions without sacrificing essential accuracy.
Definition 1.
The principle of reduced-order modeling aims to find an approximate solution of the form
where is a set of basis functions, and is a locally Lipschitz continuous map governing the temporal dynamics of the coefficients . The initial condition is prescribed on the coefficient vector at the initial time , with .
The series is assumed to converge in the norm for each fixed time t, that is,
This reduced-order model aims to approximate the true solution of the full-order system defined by the PDE (3) while ensuring a small global approximation error and computational stability.
The basis functions are called modes or shape functions; therefore, the representation (6) is called modal decomposition. Two primary goals are achieved through this modal decomposition approach: (1) the decoupling of spatial structures from the unsteady (time-dependent) components of the solution, and (2) the modeling of the original system’s nonlinearity through a lower-dimensional temporal dynamical system. This separation not only reduces computational complexity but also preserves the essential dynamics of the original PDE system in a more efficient and interpretable form.
2.2. Koopman Operator Framework for Modal Decomposition
Introduced by Koopman in 1931, Koopman operator theory [34,35,57] provides a rigorous mathematical framework for the modal decomposition of nonlinear dynamical systems by representing them through linear, infinite-dimensional operators acting on observables. Despite its early formulation, the theory remained largely theoretical for decades.
In 1985, Lasota and Mackey [58] brought renewed scientific research interest to the original approach proposed by Koopman. Notably, they were the first to explicitly introduce and formalize the term “Koopman operator” in the literature, thereby establishing a standardized nomenclature for this concept. This terminology was further reinforced in the second edition of their book [59], where the use of the Koopman operator as the adjoint to the Frobenius–Perron operator was maintained and elaborated upon functional analysis in space .
However, at that time, computational resources were still insufficient for the numerical treatment of large-scale complex systems. The practical potential of Koopman operator theory began to be realized in the early 2000s.
Its modern scientific revival began with the pioneering work of Mezić and Banaszuk [60,61] in fluid dynamics applications, establishing the foundation for practical, data-driven modal decomposition analysis. The seminal work by Mezi’c [61] introduced a rigorous spectral framework for analyzing nonlinear dynamical systems via Koopman operator theory, formalizing the spectral decomposition of observables into Koopman eigenfunctions and modes and establishing the foundation for operator-theoretic analysis of nonlinear dynamics. The spectral properties of the Koopman operator have been the subject of ongoing investigation, as exemplified in [39,42,62].
This paper proposes an adaptation of the Koopman framework to the context of nonlinear partial differential equations, extending its applicability to infinite-dimensional dynamical systems governed by PDEs.
Let denote the evolution operator of (3) such that
i.e., maps the initial condition to the state at time t.
Definition 2.
An observable of the PDE (3) is defined as a possibly nonlinear functional on the state space, typically a Hilbert space, such as :
which maps the infinite-dimensional state u to a measurable output quantity. Here, denotes the dimension of the observable space, representing the number of scalar measurements or features extracted from the state u. These measurements may vary over time, thus capturing the temporal dynamics of the system in a finite-dimensional representation.
Remark 1.
The choice of observable g in the Koopman framework is flexible and can range from simple to highly structured representations. A common example is the identity observable, where , mapping the system state directly to itself. Alternatively, one may consider an infinite-dimensional observable vector, comprising a set of functions of the state, such as
where κ denotes a linear operator (e.g., a differential operator), and the higher-order terms capture nonlinear features of the system. This extended observable space facilitates a richer linear representation of the underlying nonlinear dynamics through the Koopman operator.
Definition 3.
The semigroup of Koopman operators acts on observable functions by composition with the evolution operator of the states as follows:
where is the initial condition. As a result, the Koopman operator is also known as a composition operator [34].
In practice, the Koopman operator is considered to be the dual, or more precisely, the left adjoint, of the Ruelle–Perron–Frobenius transfer operator [63,64,65], which acts on the space of probability density functions.
Remark 2.
The Koopman operator is linear, even though the underlying dynamics may be nonlinear [34]:
Remark 3.
The infinitesimal generator of the Koopman semigroup governs the evolution of observables via
where, for deterministic dynamics , the generator acts as
with denoting the functional (Fréchet) derivative of g with respect to u. The inner product is taken over the spatial domain [58].
Following Koopman operator theory, the solution can be expressed as a modal decomposition of the form
where are spatial Koopman modes, and are time-dependent coefficients.
The evolution of the modal coefficients is governed by a (possibly nonlinear) dynamical system defined as follows:
where is a nonlinear operator (or vector field) that defines the temporal evolution of the coefficients . Thus, the reduced-order solution of form (6) to the PDE is achievable form the perspective of Koopman mode decomposition.
Koopman modes are generally not unique, and their characterization depends on several interrelated factors. First, the definition of Koopman modes is inherently linked to the choice of observables, as the Koopman operator acts on a space of functions rather than directly on the state space. Different selections of observables can lead to different spectral representations, thereby affecting the resulting modes.
This intrinsic non-uniqueness is further compounded in practical settings, where Koopman modes are often approximated using numerical techniques such as DMD [32,33]. Such methods introduce additional variability due to factors, including data noise, finite sample sizes, and specific algorithmic implementations. Moreover, in cases where the Koopman operator exhibits a degenerate spectrum [10,66], the associated eigenspaces are typically multi-dimensional, allowing for multiple valid decompositions and further contributing to the non-uniqueness of the Koopman modes.
This work proposes a new algorithm, rooted in Koopman operator theory but fundamentally different in its formulation, specifically designed for the construction of a data-driven twin model. This new method computes Koopman modes and their associated temporal coefficients by leveraging the Koopman propagator operator projected onto a Krylov subspace of optimally selected rank. In contrast to classical DMD, the proposed approach facilitates a more structured and computationally efficient extraction of spectral components by constraining the dynamics within a finite-dimensional subspace tailored to capture the most relevant features of the system’s evolution.
3. Computational Aspects
This section introduces a novel methodology for constructing a data-driven twin model of a partial differential equation using Koopman mode decomposition. The proposed approach comprises two primary stages. The first stage, referred to as the offline phase, involves the extraction of Koopman modes and the corresponding modal decomposition coefficients that characterize the state evolution of the system. The second stage, known as the online phase, focuses on identifying a nonlinear continuous-time dynamical model that governs the temporal behavior of the data twin, thereby enabling real-time simulation and prediction. A detailed account of the computational implementation of the proposed methodology is presented hereinafter.
3.1. Offline Phase: Koopman Randomized Orthogonal Decomposition Algorithm
The data represent measurements of the PDE solution at the constant sampling time , with x representing the Cartesian spatial coordinate.
The data matrix whose columns represent the individual data samples is called the snapshot matrix:
Each column is a vector with components, representing the spatial measurements corresponding to the time instances.
We aim to find the data-driven twin representation of the solution at every time step according to the following relation:
where represents the extracted Koopman modes base functions, which we call the leading Koopman modes, represents the number of terms in the representation (17), which we impose to be minimal, and represents the modal growing amplitudes.
In classical Dynamic Mode Decomposition, the Koopman modes are not orthogonal, which often necessitates a large number of modes to achieve an accurate modal decomposition. This lack of orthogonality represents a significant drawback, as it may lead to redundancy and reduced computational efficiency.
It is more convenient to seek an orthonormal base of Koopman modes as
where is the Kronecker delta symbol, consisting of a minimum number of Koopman modes —such that the approximation of through this base is as good as possible—in order to create a data twin model to the PDE of reduced computational complexity.
The objective of the present technique is to represent with highest precision the original data through the data twin model (17) having as few terms as possible. To achieve this goal, several major innovative features are introduced in the proposed algorithm:
- The method yields orthonormal Koopman modes, guaranteeing mutual orthogonality and thereby enabling a more compact representation of the system dynamics (see Theorem 1 and its proof).
- To avoid the computational burden associated with traditional high-dimensional algorithms, the proposed method employs a randomized singular value decomposition (RSVD) technique for dimensionality reduction. The incorporation of randomization offers a key advantage: It eliminates the need for additional selection criteria to identify shape modes, which is typically required in classical approaches such as DMD or POD. The resulting algorithm efficiently identifies the optimal reduced-order subspace that captures the dominant Koopman mode basis, thereby ensuring both computational efficiency and representational fidelity (see Appendix B).
- The methodology aims to achieve maximal correlation and minimal reconstruction error between the data-driven twin model and the exact solution of the governing PDE (see Section 5).
The theoretical foundation of RSVD was laid in the seminal work of Halko, Martinsson, and Tropp (2011) [67] as part of a broader class of probabilistic algorithms for matrix approximation. A subsequent study of Erichson and Donovan (2016) demonstrated its practical efficiency in motion detection [47]. Bistrian and Navon (2017) extended its use for the first time in fluid dynamics [53,54]. Recently, the theory of randomization has been further employed in the development of reduced-order modeling techniques, particularly in conjunction with projection learning methods [68], block Krylov iteration schemes [69] or deep learning [70].
Proposition 1
(k-RSVD: Randomized Singular Value Decomposition of rank k). Let be a real-valued data matrix, and let with be the target rank.
Then, the rank-k Randomized Singular Value Decomposition (k-RSVD) of yields an approximate factorization as follows:
where contains approximate left singular vectors,
is diagonal with approximate singular values,
and contains approximate right singular vectors.
This decomposition is computed via the k-RSVD algorithm described in Appendix B.
Theorem 1
(Koopman Randomized Orthogonal Decomposition). Let denote a sequence of solution snapshots of a PDE, arranged into two time-shifted data matrices, defined as
Let , with , be a target rank. Then, there exists a reduced k-order approximation of the full state such that
where is an orthonormal set of Koopman modes spanning the reduced subspace defined as
where
is the matrix of the first k left singular vectors of obtained via k-RSVD;
contains the eigenvectors of the Gram matrix associated with the finite-dimensional approximation of the Koopman operator defined by the time evolution
The corresponding modal coefficients are computed via the inner product between the data matrix and Koopman modes defined as
The proposed modal representation method is hereafter referred to as Koopman Randomized Orthogonal Decomposition (KROD).
Proof.
We consider a sequence of solution snapshots obtained from a discrete-time dynamical system governed by an underlying (possibly nonlinear) evolution law. Under the Koopman operator framework [34], we adopt the identity observable so that the state vectors themselves are treated as observables (see Remark 1).
There exists a linear Koopman operator acting on observables such that
This implies that each state is obtained by iterated application of the Koopman operator to the initial state under the identity observable. The operator thus advances the system in time linearly in the (possibly infinite-dimensional) observable space.
The sequence (23) lies in the Krylov subspace
that captures how the observable evolves under the Koopman dynamics.
The Krylov subspace (24) gives a finite-dimensional proxy to study the action of the infinite-dimensional Koopman operator. For a sufficiently long sequence of the snapshots, suppose that the last snapshot can be written as a linear combination of previous vectors, on the Krylov subspace (24), such that
in which , and is the residual vector. The following relations are true:
where is the unknown column vector.
Assume there exists a diagonal matrix whose eigenvalues asymptotically approximate those of as approaches zero. Solving the eigenvalue problem
is equivalent to solve the minimization problem
where is the -norm of .
For , we identify the k-RSVD of that yields the following factorization:
where and are orthogonal matrices that contain the eigenvectors of and , respectively, is a square diagonal matrix containing the singular values of , and H means the conjugate transpose.
Relations and yield
As a consequence, the solution to the minimization problem (28) is the matrix operator
As a direct result, the eigenvalues of will converge toward the eigenvalues of the Koopman propagator operator .
Let and be the eigenvectors, respectively the eigenvalues of the Hermitian positive semi-definite Gram matrix as
From the k-RSVD of , it follows that the column space of is the same as the column space of U, i.e.,
Using the definition and substituting into the expression for ,
since .
Since is diagonal and W is unitary, represents a unitary similarity transform [71] of matrix , i.e., acts in a reduced coordinate system defined by the k-RSVD.
Let
Since the columns of X are vectors in , and U is an orthonormal basis for the column space of , the columns of are linear combinations of the columns of U.
Thus,
i.e., the set of vectors lies in the column space of . Therefore, the span of the eigenvectors forms a subspace of the space containing the data in .
It follows that there exists a subspace of the space containing the data in spanned by the following sequence of Koopman modes:
where U represents the matrix of left singular vectors produced by k-RSVD of data matrix .
We proceed to demonstrate that the columns of are orthonormal. Since U comes from the k-RSVD of , it has orthonormal columns defined as
Now, compute the inner product of as
So, the orthonormality of depends on . The matrix X contains the eigenvectors of the Hermitian Gram matrix . Since is Hermitian, it has a complete set of orthonormal eigenvectors. Thus, by choosing the eigenvectors to be orthonormal, we have
i.e., columns of are orthonormal.
It follows that
i.e., Koopman modes form an orthnormal base to the data space.
We continue by establishing the formula for the modal coefficients.
Assume that the data evolve linearly in reduced k-order representation (20) and are written in matrix formulation as
Multiplying both sides on the left by results in
Since has orthonormal columns, we get
Thus,
If , and , then we can alternatively write
We choose to project onto the subspace spanned by the orthonormal basis to reduce computational complexity. Consequently, the coefficient matrix
provides a representation with a smaller approximation error in the least-squares sense. □
Proposition 2
(Multi-objective twin-model selection via Pareto front analysis). Let be a strictly increasing sequence of target ranks satisfying
For each target rank , define a Koopman-based model triplet consisting of
: a Koopman mode basis of size ;
: the corresponding modal amplitude matrix;
: the reduced-order rank.
Define the candidate set of model triplets as
and let denote the reduced-order solution associated with , which is given by
Given the full-order PDE solution u, the goal is to identify the optimal triplet by solving the following constrained multi-objective optimization problem:
where denotes the discrete Euclidean norm over all spacetime points, and H denotes the Hermitian (conjugate transpose).
The Pareto-optimal subset of model triplets is defined as
Let the Pareto-optimal set of the Koopman model triplet be denoted by the solution that represents the best trade-offs between competing objectives as
where the number of modes in the final reduced model is .
The resulting data-driven twin model (DTM) is then expressed as
where , and .
This framework is designed to simultaneously balance two competing objectives: (Objective 1) ensuring high fidelity by minimizing the pointwise discrepancy between the true solution and data twin model prediction and (Objective 2) preserving structural alignment by maximizing the normalized cosine similarity or correlation between their respective dynamics.
The optimization problem (46) is resolved numerically using Pareto front analysis [72], which is a multi-objective optimization strategy that identifies the set of non-dominated solutions balancing competing objectives. The implementation details are provided in Appendix B.
3.2. Online Phase: Modeling the Data Twin Temporal Dynamic by Explainable Deep Learning
The calculation step of the modes in the offline phase is performed only once. The data twin model is not complete without the temporal component. These computations are carried out in the second step, during which the mathematical model is integrated over time. Additionally, if needed, the dynamics of the reduced-order model can be evaluated at any specific time point. For this reason, this step is referred to as the online phase, as it can be executed on demand to simulate the behavior of the original process.
Unlike conventional machine learning models, which typically function as opaque black boxes operating on entire datasets without disentangling underlying factors, a key innovation of this study lies in the explicit modeling of temporal dynamics decoupled from spatial dependencies. This is achieved through the use of explainable deep learning techniques, which offer interpretable insights into the data twin model’s parameters.
In this work, Nonlinear AutoRegressive models with eXogenous inputs (NLARX) are employed as a novel deep learning-based approach within the domain of nonlinear system identification. Since the emergence of artificial neural networks as numerical tools [73,74], NLARX models have been used for various purposes, ranging from simulation [75] to nonlinear predictive control [76] or higher-order nonlinear optimization problems [77,78].
The objective is to identify a dynamical system that effectively captures the nonlinear temporal evolution of the underlying process expressed in the form
based on modal temporal coefficients computed by the KROD algorithm in the offline phase, and initial condition obtained by projecting the first snapshot onto the Koopman mode basis as
To approximate the system dynamics, the evolution of the state is modeled using the NLARX model structure, which is expressed as
where is a nonlinear estimator realized by a cascade-forward neural network, capturing the underlying nonlinear temporal dependencies and input effects. Here, denotes the number of past output terms, represents the number of past input terms used to predict the current output, and corresponds to the input delay, while captures the modeling error. Each output of the NLARX model described in (50) is determined by regressors, which are transformations of previous input and output values. Typically, this mapping consists of a linear component and a nonlinear component, with the final model output being the sum of these two contributions.
Thus, the NLARX model serves as an empirical approximation of the continuous dynamics , with the neural network mapping implicitly representing the evolution operator of the system such that
where is the discrete time step, and denotes the modeling error.
Training the NLARX model can be formulated as a nonlinear unconstrained optimization problem of the form
In this formulation, the training dataset comprises the measured input , while denotes the output generated by the NLARX model. The symbol refers to the norm, and represents the parameter vector associated with the nonlinear function .
The NLARX architecture is well suited for capturing system dynamics by feeding previous network outputs back into the input layer. It also allows for the specification of how many past input and output time steps are necessary to accurately represent the system’s behavior. A critical aspect of effectively applying an NLARX network lies in the careful selection of inputs, input delays, and output delays. The objective is to adjust the network parameters across the entire trajectory to minimize the objective function defined in (52).
The reduced-order data-driven twin model for the PDE solution is obtained in the form
where is the rank of the optimal Koopman basis, computed by the algorithm, are the leading Koopman modes representing dominant spatial patterns computed by the algorithm, and is the system temporal dynamics in the reduced-order space—modeled by the deep learning architecture with initial condition given by Equation (49).
3.3. Qualitative Analysis of the Data-Driven Twin Model
A qualitative assessment of the orthogonality between the Koopman modes derived using the KROD algorithm proposed in this study can be carried out through the Modal Assurance Criterion (MAC) [79].
The discrete MAC value between two mode vectors is defined as
where denotes the Hermitian (complex-conjugate) inner product in .
The orthogonality matrix is symmetric and real-valued. The values lie within the interval , as the leading Koopman modes obtained from the KROD algorithm are normalized vectors. In this context, Koopman modes are considered orthogonal if
The Pearson correlation coefficient is employed to quantify the correlation between the data twin model solution and the true solution of the partial differential equation, providing a measure of how closely the data twin model approximates the true dynamics across the spacetime domain.
Let be the true solution and be the data twin model solution of the PDE, sampled at spatial points and time instances. Define the flattened vectors as
Let denote the k-th element of the vector and denote the k-th element of the vector .
The Pearson correlation coefficient between and is given by
where the quantities
represent the mean values of the vectors and , respectively.
In addition to the Pearson correlation coefficient, the mean absolute error (MAE) is employed as a complementary metric to assess the average magnitude of pointwise discrepancies over the spacetime domain, providing a more direct measure of predictive accuracy irrespective of correlation structure, as
In addition to these metrics, to provide fine-grained, pointwise insight into how well the data twin model approximates the true solution of PDE at specific locations in space and time, we define the absolute local error matrix as
for all and .
3.4. Time Simulation and Validation of the Data-Driven Twin Model
The data-driven twin model was subjected to time-domain simulation, followed by a two-step input–output validation of its predicted response. In the first validation step, the model was trained using the initial two-thirds of the available snapshots, with the remaining one-third reserved for validation. In the subsequent step, the training dataset was further reduced to the first one-third of the snapshots, and the remaining two-thirds were employed to assess the model’s predictive performance.
4. Data-Driven Twin Modeling of Shock Wave Phenomena Using KROD
This section demonstrates the application of the proposed KROD algorithm to shock wave modeling using the viscous Burgers’ equation.
4.1. Governing Equations of the Mathematical Model
The viscous Burgers equation model is considered in the form
where is the unknown function of time t, and is the viscosity parameter.
Three experiments are considered, exhibiting progressively more complex dynamics, with each characterized by an initial condition of the following form:
Homogeneous Dirichlet boundary conditions are imposed for all three examples and specified as follows:
Equation (60), which defines the initial condition for Experiment 1, produces a sinusoidal pulse characterized by an abrupt change in slope at the boundaries of the domain. The initial value problem with the discontinuous initial condition given by (61) is referred to as a Riemann problem, which leads to the formation of a shock wave. For Experiment 3, the initial condition described by (62) induces a more complex evolution of the pulse.
All three experiments involve phenomena that pose significant challenges for standard numerical methods to accurately capture.
4.2. Analytical and Numerical Derivation of the Exact Solution
The Cole–Hopf transformation, independently introduced by Hopf (1950) [80] and Cole (1951) [81], converts the Burgers’ equation into the heat equation, thereby enabling the derivation of its exact solution. The analytical solution of the Burgers equation model (59) is derived using the Cole–Hopf transformation, as detailed in Appendix A.1.
Using the Cole–Hopf transformation, the analytic solution to the problem (59) is obtained in the following form:
To numerically compute the exact solution (64) corresponding to the initial conditions of the three test cases (60)–(62), the Gauss–Hermite quadrature technique is employed [82], which is fully described in Appendix A.2. The following results are thereby obtained for the three experimental cases.
The exact solution to the Burgers equation model (59) with the initial condition (60) is equivalent to the following form:
5. Numerical Results
The algorithm underlying the Koopman Randomized Orthogonal Decomposition method is described in detail in Appendix B. This section presents numerical results highlighting the computational efficiency of the proposed KROD method combined with deep learning (DL) for temporal simulation. The findings demonstrate that the approach produces a high-fidelity, reduced-complexity model that accurately captures the dynamics of the original system and enables real-time simulation, effectively functioning as a data-driven twin model.
The computational domain is defined as , with , and the time interval considered is , where . The viscosity parameter in the Burgers equation was set to for all three experiments. The domain was uniformly discretized using grid points, resulting in a mesh size of .
The Riemann problem parameters were assumed to be and .
By applying the Cole–Hopf transformation (A1), the analytical solutions to the Burgers problem (59) were obtained for all three experiments, corresponding, respectively, to the forms (65), (66), and (67), as detailed in Appendix A.1. Subsequently, the exact solutions for the three test cases were computed numerically using the Gauss–Hermite quadrature method (A8) with nodes (see Appendix A.2).
The following figure presents the exact solution to the viscous Burgers equation model. Figure 1a presents the exact solution of the viscous Burgers’ equation corresponding to the initial condition given in Equation (60), as derived in the analytical form shown in Equation (65). The exact solution of the viscous Burgers’ equation for the second experiment, based on the initial condition specified in Equation (61), is depicted in Figure 1b. This solution is obtained in the analytical form provided in Equation (66). Figure 1c shows the exact solution of the viscous Burgers’ equation for the third experiment, corresponding to the initial condition defined in Equation (62), and derived in the analytical form given in Equation (67).
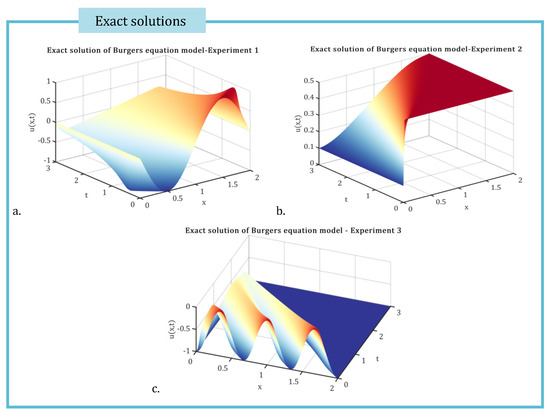
Figure 1.
(a) Exact solution of the viscous Burgers equation for the initial condition in Equation (60), derived analytically as in Equation (65). (b) Exact solution of the viscous Burgers’ equation for the second experiment with initial condition from Equation (61), derived analytically as in Equation (66). (c) Exact solution of the viscous Burgers equation for the third experiment with initial condition from Equation (62), derived analytically as in Equation (67).
The data-driven twin models of the form (47) are generated using the KROD algorithm as high-fidelity surrogates for the three Burgers problems examined in this study. For this purpose, the training dataset consists of a total of snapshots collected at uniformly spaced time intervals of and spatial measurements recorded for each time snapshot.
KROD algorithm determines the optimal dimension of the subspace spanned by the dominant Koopman modes by solving the multiobjective optimization problem with nonlinear constraints stated in (46). This problem is solved by employing a genetic algorithm to identify the Pareto front corresponding to the two fitness functions.
Figure 2a,c,e depict the optimization objectives defined in Equation (46) with respect to the modal space dimension in the range . Figure 2b,d,f present the Pareto front solution for each of the three experiments, respectively.
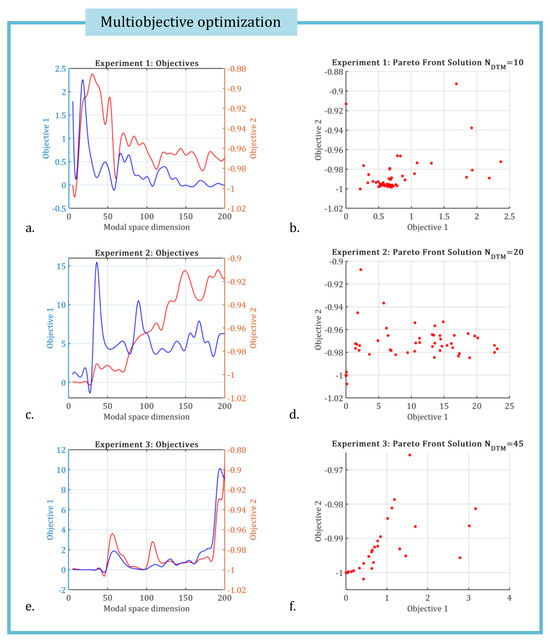
Figure 2.
Figures (a,c,e) show the optimization objectives defined in Equation (46) with respect to the modal space dimension in the range . Figures (b,d,f) present the corresponding Pareto front solutions for the three experiments obtained using a genetic algorithm.
For Experiment 1, the optimal dimension of the subspace spanned by the leading modes is (Figure 2b). In Experiment 2, the data twin model representing the Riemann problem dynamics has an optimal subspace dimension of (Figure 2d). For Experiment 3, the increased complexity of the pulse is captured by a data twin model with a higher dimension of (Figure 2f). In all three cases, the computational time required by the KROD algorithm in offline phase remains extremely low, as illustrated in Figure 3.
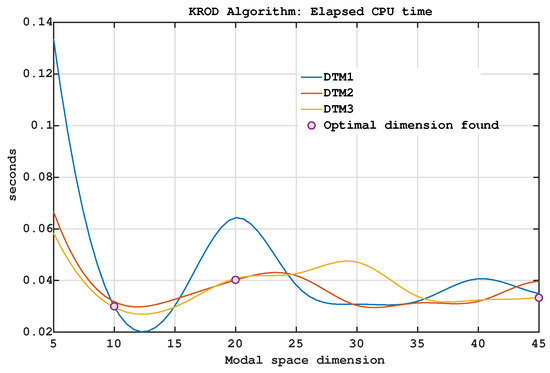
Figure 3.
The running CPU time for KROD in offline phase, for the three experiments, respectively.
The KROD algorithm identified the optimal dimension of the modal basis and computed the optimal Koopman modes along with their associated time-dependent amplitudes. As a result, the data-driven twin model (47) was constructed, which—by definition—exhibits minimal approximation error and maximal correlation with respect to the original data model.
To facilitate a qualitative assessment of the DTMs, Table 2 reports the outcomes of the multiobjective optimization problem (46) as solved by the KROD. Specifically, the table includes the dimensionality of the leading Koopman modes; the absolute error, as defined in Equation (57); and the correlation coefficient, as given by Equation (56) between the exact solution and the corresponding data twin model for each of the three experiments considered.
Table 2.
Qualitative analysis of the DTMs.
An analysis of the results presented in Table 2 reveals that the KROD algorithm produced models exhibiting perfect correlation with the original data, i.e., , across all three test cases. Furthermore, the absolute errors remained remarkably low: on the order of .
The selection of modes solely based on their energy ranking proves effective only under specific conditions [45,83]. Some modes, despite contributing minimally to the overall energy, may exhibit rapid temporal growth at low amplitudes or represent strongly damped high-amplitude structures. Such modes can play a significant role in enhancing the fidelity of the data twin model. A key advantage of the KROD algorithm over traditional DMD-based approaches lies in its ability to generate a substantially lower-dimensional subspace that retains the most dynamically significant Koopman modes. As a result, the KROD method avoids the need for an additional—often subjective—mode selection criterion. Moreover, the orthogonality of the KROD modes contributes to their qualitative superiority, enabling accurate modeling with a reduced number of modes.
To assess the orthogonality of the Koopman modes computed by KROD algorithm, the orthogonality matrix introduced in Section 3.3 was evaluated for each of the three experiments considered in this study. The orthogonality matrices corresponding to the three investigated experiments are shown, respectively, in both 3D and 2D views in Figure 4a–c. The values calculated using Equation (54) validate the mutual orthogonality of the Koopman modes across all cases.
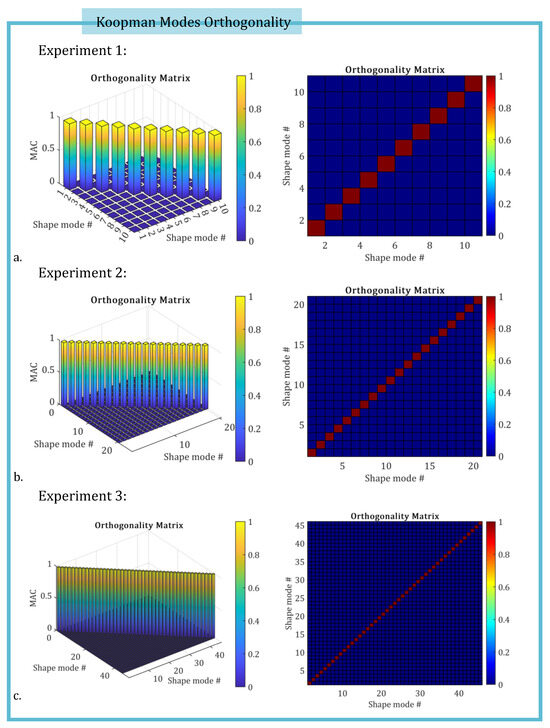
Figure 4.
The orthogonality matrices corresponding to the three investigated experiments are shown, respectively, in both 3D and 2D views, in Figures (a–c). The values, computed according to Equation (54), confirm the mutual orthogonality of the Koopman modes in each case.
The KROD algorithm facilitates the identification of the leading Koopman modes and their corresponding temporal coefficients. To achieve high-fidelity time simulation of the data-driven twin model’s temporal parameters, Nonlinear AutoRegressive models with eXogenous inputs (NLARX) were employed (revise Section 3.2. The data-driven twin model, formulated as in Equation (53), was evaluated through time-domain simulation followed by a two-step input–output validation procedure. First, it was trained on the initial two-thirds of the snapshots, with the remaining third used for validation. Then, the training set was reduced to the first third, and the remaining two-thirds were used to evaluate predictive performance. Figure 5, Figure 6 and Figure 7 present the two-fold input–output validation results for three randomly selected temporal coefficients simulated using the optimal NLARX models for Experiments 1, 2, and 3, respectively. These results demonstrate that the deep learning-based NLARX models accurately replicated the coefficient dynamics, even when the training dataset was reduced to only the first third of the available snapshots. Relevant performance metrics for the deep learning simulations are also provided in the figures.
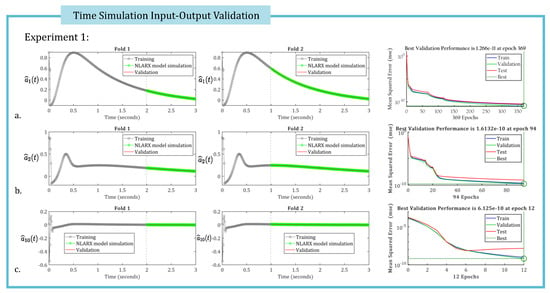
Figure 5.
Two-fold input-output validation for the first two (a,b) temporal coefficients and the tenth (last) (c) temporal coefficient during the simulated responses of the optimal NLARX models in Experiment 1. The corresponding deep learning performance metrics are also included in the figure on the right.
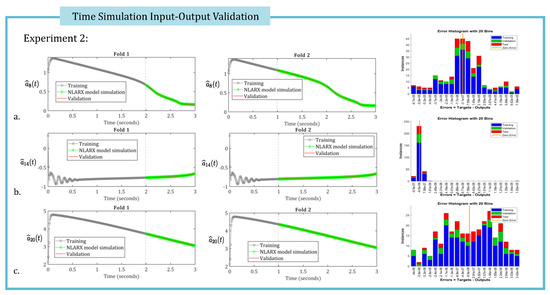
Figure 6.
Two-fold input-output validation for the eighth (a) temporal coefficient, the fourteenth (b) temporal coefficient, and the twentieth (last) (c) temporal coefficient during the simulated responses of the optimal NLARX models in Experiment 2. The corresponding deep learning performance metrics are also presented in the figure on the right.
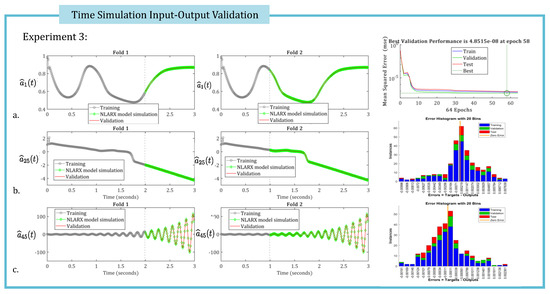
Figure 7.
Two-fold input-output validation for the first (a) temporal coefficient, the twenty-fifth (b) temporal coefficient, and the forty-fifth (last) (c) temporal coefficient during the simulated responses of the optimal NLARX models in Experiment 3. Corresponding deep learning performance metrics are presented in the figure on the right.
Data-driven twin models, constructed in the form prescribed by Equation (53), were subsequently evaluated against the corresponding exact solutions to assess the absolute local error, as defined by Equation (58), for each of the three experimental cases under consideration. As illustrated in Figure 8, the response of the twin models exhibits near-perfect correlation with the exact solutions, as evidenced by the consistently low magnitude of the local error.
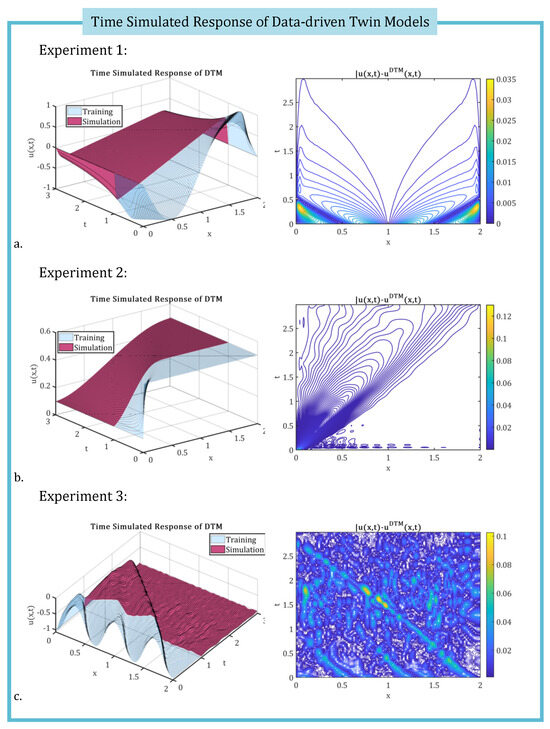
Figure 8.
Data-driven twin model responses, constructed via Equation (53), show near-perfect agreement with exact solutions across all experiments. The left subfigures display the time-simulated responses for each experiment, while the right subfigures show the corresponding absolute local errors computed from Equation (58). (a) Results for Experiment 1, (b) results for Experiment 2, (c) results for Experiment 3.
Figure 9 presents the CPU time required during the online phase of the algorithm, in which the deep learning process was executed, as a function of the optimized modal space dimension for the three experimental cases analyzed. The reported CPU times correspond to two successive computational runs. All simulations and visualizations were performed using custom scripts developed in Matlab R2022a and executed on a system equipped with an Intel i7-7700K processor. The observed computational times are considered acceptable and fall within a reasonable range for practical implementation.
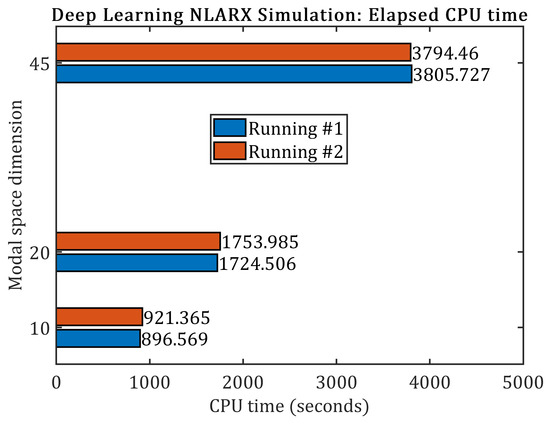
Figure 9.
The running CPU time for the online phase of the algorithm with respect to the modal space dimension optimized in the case of the three experiments considered.
6. Conclusions
This study presents a novel framework for developing data-driven twin models with reduced computational complexity for nonlinear dynamical systems governed by partial differential equations, addressing a problem of growing importance in the field of data science. To the best of the author’s knowledge, this is the first work to introduce the Koopman Randomized Orthogonal Decomposition (KROD) algorithm in the context of nonlinear PDEs.
This study introduces several methodological advancements that set it apart from classical modal decomposition techniques such as DMD and POD, which typically rely on heuristic or ad hoc criteria for mode selection. In contrast, the proposed KROD framework reduces computational cost while fully automating the identification of dominant modes.
The proposed approach comprises two primary phases. In the first phase, a novel numerical algorithm is developed to construct a reduced-order data twin model, selected through Pareto front analysis, to balance accuracy and complexity. In the second phase, an explainable NLARX deep learning framework is employed to enable real-time, adaptive calibration of the twin model and to predict its dynamic response. The resulting data-driven twin model achieves high fidelity by exhibiting minimal approximation error and strong correlation with the original dataset, thereby providing an accurate and computationally efficient surrogate for the underlying physical system.
A key novelty lies in the first quantitative framework for computing orthogonal Koopman modes using randomized orthogonal projections, which ensures optimal representation in the data space. Moreover, the proposed method integrates explainable deep learning techniques within the modal decomposition process, enabling interpretable and real-time calibration of the reduced-order data twin model.
Importantly, the proposed framework provides a pathway for future extensions into unsupervised learning paradigms, functioning effectively on raw observational data without requiring predefined models. This characteristic promotes broader applicability and generalization across a wide range of fluid dynamics problems and complex dynamical systems. The specific application of the KROD methodology to fluid dynamics scenarios will be the subject of future investigations.
In addition, the framework is readily extensible beyond the current scope. In particular, it holds promise for adaptation to stochastic partial differential equations, systems with sparse or incomplete measurements, and higher-dimensional problems involving 2D and 3D PDEs, directions the author aims to pursue in future research.
Funding
This research received no external funding.
Data Availability Statement
The original contributions presented in this study are included in the article. Further inquiries can be directed to the corresponding author.
Acknowledgments
The author would like to express sincere gratitude to the anonymous reviewers for their in-depth and constructive feedback, which significantly contributed to improving the clarity and quality of this manuscript. The author also extends heartfelt thanks to Michael I. Navon for over a decade of invaluable collaboration and mentorship in the field of reduced-order modeling.
Conflicts of Interest
The author declares no conflicts of interest.
Abbreviations
The following abbreviations are used in this manuscript:
| PDE | Partial Differential Equation |
| DTM | Data-driven Twin Model |
| POD | Proper Orthogonal Decomposition |
| DMD | Dynamic Mode Decomposition |
| RSVD | Randomized Singular Value Decomposition |
| k-RSVD | Randomized Singular Value Decomposition of rank k |
| KROD | Koopman Randomized Orthogonal Decomposition |
| NLARX | Nonlinear AutoRegressive models with eXogenous inputs |
| MAC | Modal Assurance Criterion |
Appendix A
Appendix A.1. Derivation of the Analytical Solution Using the Cole–Hopf Transformation
The Cole–Hopf transformation is defined by
Through analytical treatment, it is found that
Substituting these expressions into (59) it follows that
Relation (A4) indicates that if solves the heat equation, then given by the Cole–Hopf transformation (A1) solves the viscous Burgers Equation (59). Thus, the viscous Burgers Equation (59) is recast into the following:
Taking the Fourier transform with respect to x for both the heat equation and the initial condition (A5), it is found that
Using the Cole–Hopf transformation (A1), the analytic solution to the problem (59) is obtained in the following form:
Appendix A.2. Derivation of the Numerical Exact Solution Using the Gauss–Hermite Quadrature
To compute the exact solution (A7) corresponding to the initial conditions of the three test cases (60)–(62), the Gauss–Hermite quadrature technique [82] is employed.
The Gauss–Hermite quadrature approximates the value of integrals of the following kind:
where n represents the number of sample points used, are the roots of the Hermite polynomial , and the associated weights are given by
In Experiment 1, the initial condition is defined by Equation (60) as
and the exact solution (A7) is obtained in the form
With the variable change
the exact solution to the Burgers equation model (59) with the initial condition (60) is equivalent to the following form:
Similarly, by applying the variable transformation (A12), the exact solutions for the subsequent two experiments are derived as follows.
In the case of Experiment 2, the exact solution to the Burgers equation model (59) with the initial condition (61) is
In the case of Experiment 3, the exact solution to the Burgers equation model (59) with the initial condition (62) is
To obtain the numerical exact solutions for the three test cases, both the numerator and denominator are evaluated using Gauss–Hermite quadrature (A8).
Appendix B
The following presents Algorithm A1, which outlines the routine employed to compute the randomized singular value decomposition of rank k (k-RSVD). Algorithm A2 details the Koopman Randomized Orthogonal Decomposition (KROD) procedure.
| Algorithm A1 (k-RSVD) Randomized Singular Value Decomposition of Rank k |
|
| Algorithm A2 (KROD) Koopman Randomized Orthogonal Decomposition |
|
|
References
- Grieves, M.; Vickers, J. Digital twin: Mitigating unpredictable, undesirable emergent behavior in complex systems. In Transdisciplinary Perspectives on Complex Systems; Springer: Cham, Switzerland, 2017; pp. 85–113. [Google Scholar]
- Tao, F.; Zhang, H.; Liu, A.; Nee, A.Y.C. Digital twin in industry: State-of-the-art. IEEE Trans. Ind. Inform. 2019, 15, 2405–2415. [Google Scholar] [CrossRef]
- Glaessgen, E.; Stargel, D. The digital twin paradigm for future NASA and U.S. Air Force vehicles. In Proceedings of the 53rd AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics and Materials Conference, Honolulu, HI, USA, 23–26 April 2012. [Google Scholar]
- Rasheed, A.; San, O.; Kvamsdal, T. Digital Twin: Values, Challenges and Enablers From a Modeling Perspective. IEEE Access 2020, 8, 21980–22012. [Google Scholar] [CrossRef]
- Holmes, P.; Lumley, J.; Berkooz, G. Turbulence, Coherent Structures, Dynamical Systems and Symmetry; Cambridge University Press: Cambridge, UK, 1996. [Google Scholar]
- Rowley, C.W.; Mezić, I.; Bagheri, S.; Schlatter, P.; Henningson, D.S. Reduced-order models for flow control: Balanced models and Koopman modes. In Seventh IUTAM Symposium on Laminar-Turbulent Transition; IUTAM Bookseries; Springer: Dordrecht, The Netherlands, 2010; Volume 18, pp. 43–50. [Google Scholar]
- Frederich, O.; Luchtenburg, D.M. Modal analysis of complex turbulent flow. In Proceedings of the 7th International Symposium on Turbulence and Shear Flow Phenomena (TSFP-7), Ottawa, ON, Canada, 28–31 July 2011. [Google Scholar]
- Kutz, J.; Sashidhar, D.; Sahba, S.; Brunton, S.; McDaniel, A.; Wilcox, C. Physics-informed machine-learning for modeling aero-optics. In Proceedings of the International Conference On Applied Optical Metrology IV, San Diego, CA, USA, 1–5 August 2021; Volume 11817, pp. 70–77. [Google Scholar]
- Schmid, P.J.; Violato, D.; Scarano, F. Decomposition of Time-resolved Tomographic PIV. In Proceedings of the 16th International Symposium on Applications of Laser Techniques to Fluid Mechanics, Lisbon, Portugal, 9–12 July 2012. [Google Scholar]
- Mezić, I. Koopman Operator, Geometry, and Learning of Dynamical Systems. Not. Am. Math. Soc. 2021, 68, 1087–1105. [Google Scholar] [CrossRef]
- Ahmed, S.E.; San, O.; Bistrian, D.A.; Navon, I.M. Sampling and resolution characteristics in reduced order models of shallow water equations: Intrusive vs nonintrusive. Int. J. Numer. Methods Fluids 2020, 92, 992–1036. [Google Scholar] [CrossRef]
- Xiao, D.; Fang, F.; Heaney, C.E.; Navon, I.M.; Pain, C.C. A domain decomposition method for the non-intrusive reduced order modelling of fluid flow. Comput. Methods Appl. Mech. Eng. 2019, 354, 307–330. [Google Scholar] [CrossRef]
- Loéve, M. Sur la covariance d’une fonction aleatoire. Comptes Rendus Hebd. Séances L’Académie Sci. Paris 1945, 220, 295–296. [Google Scholar]
- Karhunen, K. Zur Spektraltheorie stochastischer Prozesse. Ann. Acad. Sci. Fennicae. Ser. A. I. Math.-Phys. 1946, 34, 1–7. [Google Scholar]
- Lumley, J.L. Stochastic Tools in Turbulence; Academic Press: New York, NY, USA, 1970. [Google Scholar]
- Iliescu, T. ROM Closures and Stabilizations for Under-Resolved Turbulent Flows. In Proceedings of the 2022 Spring Central Sectional Meeting, Virtual, 26–27 March 2022. [Google Scholar]
- Wang, Z.; Akhtar, I.; Borggaard, J.; Iliescu, T. Proper orthogonal decomposition closure models for turbulent flows: A numerical comparison. Comput. Methods Appl. Mech. Eng. 2012, 10, 237–240. [Google Scholar] [CrossRef]
- Xiao, D.; Heaney, C.E.; Fang, F.; Mottet, L.; Hu, R.; Bistrian, D.A.; Aristodemou, D.; Navon, I.M.; Pain, C.C. A domain decomposition non-intrusive reduced order model for turbulent flows. Comput. Fluids 2019, 182, 15–27. [Google Scholar] [CrossRef]
- Gunzburger, M.; Iliescu, T.; Mohebujjaman, M.; Schneier, M. Nonintrusive stabilization of reduced order models for uncertainty quantification of time-dependent convection-dominated flows. arXiv 2018, arXiv:1810.08746. [Google Scholar]
- San, O.; Staples, A.; Wang, Z.; Iliescu, T. Approximate deconvolution large eddy simulation of a barotropic ocean circulation model. Ocean Model. 2011, 40, 120–132. [Google Scholar] [CrossRef]
- San, O.; Iliescu, T. A stabilized proper orthogonal decomposition reduced-order model for large scale quasigeostrophic ocean circulation. Adv. Comput. Math. 2014, 41, 1289–1319. [Google Scholar] [CrossRef]
- Osth, J.; Noack, B.R.; Krajnovic, S.; Barros, D.; Boree, J. On the need for a nonlinear subscale turbulence term in POD models as exemplified for a high-Reynolds-number flow over an Ahmed body. J. Fluid Mech. 2014, 747, 518–544. [Google Scholar] [CrossRef]
- Xiao, D.; Du, J.; Fang, F.; Pain, C.; Li, J. Parameterised non-intrusive reduced order methods for ensemble Kalman filter data assimilation. Comput. Fluids 2018, 177, 69–77. [Google Scholar] [CrossRef]
- Sierra, C.; Metzler, H.; Muller, M.; Kaiser, E. Closed-loop and congestion control of the global carbon-climate system. Clim. Change 2021, 165, 1–24. [Google Scholar] [CrossRef]
- Xiao, D.; Heaney, C.E.; Mottet, L.; Fang, F.; Lin, W.; Navon, I.M.; Guo, Y.; Matar, O.K.; Robins, A.G.; Pain, C.C. A reduced order model for turbulent flows in the urban environment using machine learning. Build. Environ. 2019, 148, 323–337. [Google Scholar] [CrossRef]
- San, O.; Maulik, R.; Ahmed, M. An artificial neural network framework for reduced order modeling of transient flows. Commun. Nonlinear Sci. Numer. Simul. 2019, 77, 271–287. [Google Scholar] [CrossRef]
- Kaptanoglu, A.; Callaham, J.; Hansen, C.; Brunton, S. Machine Learning to Discover Interpretable Models in Fluids and Plasmas. In Proceedings of the APS March Meeting 2022, Chicago, IL, USA, 14–18 March 2022. [Google Scholar]
- Owens, K.; Kutz, J. Data-driven discovery of governing equations for coarse-grained heterogeneous network dynamics. SIAM J. Appl. Dyn. Syst. 2023, 22, 2601–2623. [Google Scholar] [CrossRef]
- Cheng, M.; Fang, F.; Pain, C.; Navon, I. Data-driven modelling of nonlinear spatio-temporal fluid flows using a deep convolutional generative adversarial network. Comput. Methods Appl. Mech. Eng. 2020, 365, 113000. [Google Scholar] [CrossRef]
- Dumon, A.; Allery, C.; Ammar, A. Proper Generalized Decomposition method for incompressible Navier-Stokes equations with a spectral discretization. Appl. Math. Comput. 2013, 219, 8145–8162. [Google Scholar] [CrossRef]
- Dimitriu, G.; Ştefănescu, R.; Navon, I.M. Comparative numerical analysis using reduced-order modeling strategies for nonlinear large-scale systems. J. Comput. Appl. Math. 2017, 310, 32–43. [Google Scholar] [CrossRef]
- Schmid, P.J.; Sesterhenn, J. Dynamic mode decomposition of numerical and experimental data. In Proceedings of the 61st Annual Meeting of the APS Division of Fluid Dynamics, American Physical Society, San Antonio, TX, USA, 23–25 November 2008; Volume 53. [Google Scholar]
- Schmid, P. Dynamic mode decomposition of numerical and experimental data. J. Fluid Mech. 2010, 656, 5–28. [Google Scholar] [CrossRef]
- Koopman, B. Hamiltonian systems and transformations in Hilbert space. Proc. Natl. Acad. Sci. USA 1931, 17, 315–318. [Google Scholar] [CrossRef]
- Koopman, B.; von Neumann, J. Dynamical systems of continuous spectra. Proc. Natl. Acad. Sci. USA 1932, 18, 255–263. [Google Scholar] [CrossRef]
- Percic, M.; Zelenika, S.; Mezić, I. Artificial intelligence-based predictive model of nanoscale friction using experimental data. Friction 2021, 9, 1726–1748. [Google Scholar] [CrossRef]
- Pant, P.; Doshi, R.; Bahl, P.; Farimani, A.B. Deep learning for reduced order modelling and efficient temporal evolution of fluid simulations. Phys. Fluids 2021, 33, 107101. [Google Scholar] [CrossRef]
- Tu, J.H.; Rowley, C.W.; Luchtenburg, D.M.; Brunton, S.L.; Kutz, J.N. On dynamic mode decomposition: Theory and applications. J. Comput. Dyn. 2014, 1, 391–421. [Google Scholar] [CrossRef]
- Brunton, S.L.; Brunton, B.W.; Proctor, J.L.; Kutz, J.N. Koopman Invariant Subspaces and Finite Linear Representations of Nonlinear Dynamical Systems for Control. PLoS ONE 2016, 11, e0150171. [Google Scholar] [CrossRef] [PubMed]
- Kutz, J.N.; Fu, X.; Brunton, S.L. Multiresolution dynamic mode decomposition. SIAM J. Appl. Dyn. Syst. 2016, 15, 713–735. [Google Scholar] [CrossRef]
- Li, B.; Ma, Y.; Kutz, J.; Yang, X. The Adaptive Spectral Koopman Method for Dynamical Systems. SIAM J. Appl. Dyn. Syst. 2023, 22, 1523–1551. [Google Scholar] [CrossRef]
- Chen, K.K.; Tu, J.H.; Rowley, C.W. Variants of dynamic mode decomposition: Boundary condition, Koopman and Fourier analyses. J. Nonlinear Sci. 2012, 22, 887–915. [Google Scholar] [CrossRef]
- Jovanovic, M.R.; Schmid, P.J.; Nichols, J.W. Sparsity-promoting dynamic mode decomposition. Phys. Fluids 2014, 26, 024103. [Google Scholar] [CrossRef]
- Williams, M.O.; Kevrekidis, I.G.; Rowley, C.W. A data-driven approximation of the Koopman operator: Extending Dynamic Mode Decomposition. J. Nonlinear Sci. 2015, 25, 1307–1346. [Google Scholar] [CrossRef]
- Noack, B.R.; Stankiewicz, W.; Morzynski, M.; Schmid, P.J. Recursive dynamic mode decomposition of transient and post-transient wake flows. J. Fluid Mech. 2016, 809, 843–872. [Google Scholar] [CrossRef]
- Proctor, J.L.; Brunton, S.L.; Kutz, J.N. Dynamic mode decomposition with control. SIAM J. Appl. Dyn. Syst. 2016, 15, 142–161. [Google Scholar] [CrossRef]
- Erichson, N.B.; Donovan, C. Randomized low-rank Dynamic Mode Decomposition for motion detection. Comput. Vis. Image Underst. 2016, 146, 40–50. [Google Scholar] [CrossRef]
- Ahmed, S.E.; Dabaghian, P.H.; San, O.; Bistrian, D.A.; Navon, I.M. Dynamic mode decomposition with core sketch. Phys. Fluids 2022, 34, 066603. [Google Scholar] [CrossRef]
- Goldschmidt, A.; Kaiser, E.; Dubois, J.; Brunton, S.; Kutz, J. Bilinear dynamic mode decomposition for quantum control. New J. Phys. 2021, 23, 033035. [Google Scholar] [CrossRef]
- Le Clainche, S.; Vega, J.M. Higher Order Dynamic Mode Decomposition. SIAM J. Appl. Dyn. Syst. 2017, 16, 882–925. [Google Scholar] [CrossRef]
- Bistrian, D.A.; Navon, I.M. An improved algorithm for the shallow water equations model reduction: Dynamic Mode Decomposition vs POD. Int. J. Numer. Methods Fluids 2015, 78, 552–580. [Google Scholar] [CrossRef]
- Bistrian, D.A.; Navon, I.M. The method of dynamic mode decomposition in shallow water and a swirling flow problem. Int. J. Numer. Methods Fluids 2017, 83, 73–89. [Google Scholar] [CrossRef]
- Bistrian, D.A.; Navon, I.M. Randomized dynamic mode decomposition for nonintrusive reduced order modelling. Int. J. Numer. Methods Eng. 2017, 112, 3–25. [Google Scholar] [CrossRef]
- Bistrian, D.A.; Navon, I.M. Efficiency of randomised dynamic mode decomposition for reduced order modelling. Int. J. Comput. Fluid Dyn. 2018, 32, 88–103. [Google Scholar] [CrossRef]
- Bistrian, D.A.; Dimitriu, G.; Navon, I.M. Modeling dynamic patterns from COVID-19 data using randomized dynamic mode decomposition in predictive mode and ARIMA. In Proceedings of the AIP Conference Proceedings, Albena, Bulgaria, 24–29 June 2020; Volume 2302, p. 080002. [Google Scholar]
- Bistrian, D.A.; Dimitriu, G.; Navon, I.M. Processing epidemiological data using dynamic mode decomposition method. In Proceedings of the AIP Conference Proceedings, Albena, Bulgaria, 20–25 June 2019; Volume 2164, p. 080002. [Google Scholar]
- Koopman, B. On distributions admitting a sufficient statistic. Trans. Am. Math. Soc. 1936, 39, 399–400. [Google Scholar] [CrossRef]
- Lasota, A.; Mackey, M.C. Probabilistic Properties of Deterministic Systems; Cambridge University Press: Cambridge, UK, 1985. [Google Scholar]
- Lasota, A.; Mackey, M. Chaos, Fractals, and Noise. Stochastic Aspects of Dynamics; Springer: Berlin/Heidelberg, Germany, 1994. [Google Scholar]
- Mezić, I.; Banaszuk, A. Comparison of systems with complex behavior. Phys. D Nonlinear Phenom. 2004, 197, 101–133. [Google Scholar] [CrossRef]
- Mezić, I. Spectral properties of dynamical systems, model reduction and decompositions. Nonlinear Dyn. 2005, 41, 309–325. [Google Scholar] [CrossRef]
- Rowley, C.W.; Mezić, I.; Bagheri, S.; Schlatter, P.; Henningson, D.S. Spectral analysis of nonlinear flows. J. Fluid Mech. 2009, 641, 115–127. [Google Scholar] [CrossRef]
- Perron, O. Zur Theorie der Matrices. Math. Ann. 1907, 64, 248–263. [Google Scholar] [CrossRef]
- Frobenius, G. Uber Matrizen aus positiven Elementen. Sitzungsberichte Königlich Preuss. Akad. Wiss. 1908, 1, 471–476. [Google Scholar]
- Ruelle, D.P. Chance and Chaos; Princeton University Press: Princeton, NJ, USA, 1993; Volume 110. [Google Scholar]
- Mezić, I. On numerical approximations of the Koopman operator. Mathematics 2022, 10, 1180. [Google Scholar] [CrossRef]
- Halko, N.; Martinsson, P.G.; Tropp, J.A. Finding structure with randomness: Probabilistic algorithms for constructing approximate matrix decompositions. SIAM Rev. 2011, 53, 217–288. [Google Scholar] [CrossRef]
- Surasinghe, S.; Bollt, E.M. Randomized Projection Learning Method for DynamicMode Decomposition. Mathematics 2021, 9, 2803. [Google Scholar] [CrossRef]
- Qiu, Y.; Sun, W.; Zhou, G.; Zhao, Q. Towards efficient and accurate approximation: Tensor decomposition based on randomized block Krylov iteration. Signal Image Video Process 2024, 18, 6287–6297. [Google Scholar] [CrossRef]
- Bistrian, D.A. High-fidelity digital twin data models by randomized dynamic mode decomposition and deep learning with applications in fluid dynamics. Modelling 2022, 3, 314–332. [Google Scholar] [CrossRef]
- Golub, G.H.; Loan, C.F.V. Matrix Computations, 4th ed.; Johns Hopkins University Press: Baltimore, MD, USA, 2013. [Google Scholar]
- Deb, K. Multi-Objective Optimization Using Evolutionary Algorithms; John Wiley & Sons: Hoboken, NJ, USA, 2001. [Google Scholar]
- Juditsky, A.; Hjalmarsson, H.; Benveniste, A.; Deylon, B.; Ljung, L.; Sloberg, J.; Zhang, Q. Nonlinear black-box models in system identification: Mathematical foundations. Automatica 1995, 31, 1725–1750. [Google Scholar] [CrossRef]
- Ljung, L. System Identification: Theory for the User; Information and System Sciences Series; Prentice Hall: Hoboken, NJ, USA, 1999. [Google Scholar]
- Nelles, O. Nonlinear System Identification: From Classical Approaches to Neural Networks and Fuzzy Models; Springer: Berlin/Heidelberg, Germany, 2001. [Google Scholar]
- Liu, G.; Kadirkamanathan, V.; Billings, S. Predictive control for non-linear systems using neural networks. Int. J. Control 1998, 71, 1119–1132. [Google Scholar] [CrossRef]
- Tieleman, T.; Hinton, G. Divide the Gradient by a Running Average of Its Recent Magnitude; Neural Networks for Machine Learning; Coursera: Mountain View, CA, USA, 2012. [Google Scholar]
- Wang, Z.; Xiao, D.; Fang, F.; Govindan, R.; Pain, C.; Guo, Y. Model identification of reduced order fluid dynamics systems using deep learning. Int. J. Numer. Methods Fluids 2018, 86, 255–268. [Google Scholar] [CrossRef]
- Ewins, D. Modal Testing: Theory, Practice and Application; Research Studies Press Ltd.: Totnes Devon, UK, 2000. [Google Scholar]
- Hopf, E. The partial differential equation ut + uux = νuxx. Commun. Pure Appl. Math. 1950, 3, 201–230. [Google Scholar] [CrossRef]
- Cole, J.D. On a quasi-linear parabolic equation occurring in aerodynamics. Q. Appl. Math. 1951, 9, 225–236. [Google Scholar] [CrossRef]
- Brass, H.; Petras, K. Quadrature Theory. The Theory of Numerical Integration on a Compact Interval; American Mathematical Society: Providence, RI, USA, 2011. [Google Scholar]
- Noack, B.R.; Morzynski, M.; Tadmor, G. Reduced-Order Modelling for Flow Control; Springer: Berlin/Heidelberg, Germany, 2011. [Google Scholar]









Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).